基于OpenCV+YOLOv5实现车辆跟踪与计数(附源码)
导 读
本文主要介绍基于OpenCV+YOLOv5实现车辆跟踪与计数的应用,并给出源码。
资源下载
基础代码和视频下载地址:
https://github.com/freedomwebtech/win11vehiclecount
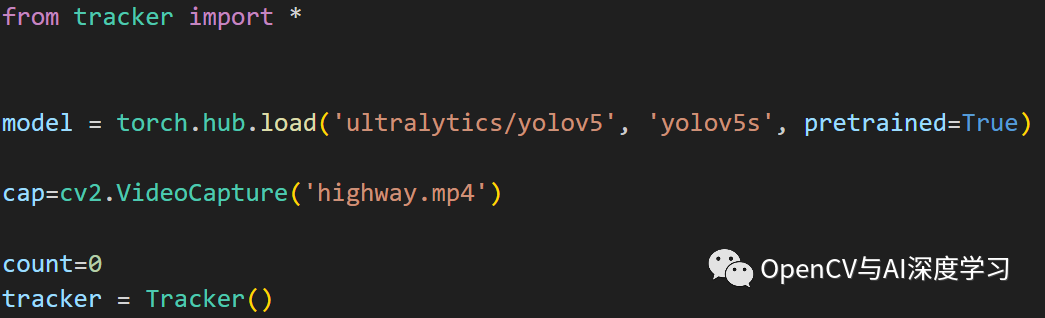
main.py代码:
import cv2import torchimport numpy as npfrom tracker import *model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)cap=cv2.VideoCapture('highway.mp4')count=0tracker = Tracker()def POINTS(event, x, y, flags, param):if event == cv2.EVENT_MOUSEMOVE :colorsBGR = [x, y]print(colorsBGR)cv2.namedWindow('FRAME')cv2.setMouseCallback('FRAME', POINTS)while True:ret,frame=cap.read()if not ret:breakcount += 1if count % 3 != 0:continueframe=cv2.resize(frame,(1020,600))results=model(frame)results.pandas().xyxy[0]cv2.imshow("FRAME",frame)if cv2.waitKey(0)&0xFF==27:breakcap.release()cv2.destroyAllWindows()
tracker.py代码:
import mathclass Tracker:def __init__(self):# Store the center positions of the objectsself.center_points = {}# Keep the count of the IDs# each time a new object id detected, the count will increase by oneself.id_count = 0def update(self, objects_rect):# Objects boxes and idsobjects_bbs_ids = []# Get center point of new objectfor rect in objects_rect:x, y, w, h = rectcx = (x + x + w) // 2cy = (y + y + h) // 2# Find out if that object was detected alreadysame_object_detected = Falsefor id, pt in self.center_points.items():dist = math.hypot(cx - pt[0], cy - pt[1])if dist < 35:self.center_points[id] = (cx, cy)# print(self.center_points)objects_bbs_ids.append([x, y, w, h, id])same_object_detected = Truebreak# New object is detected we assign the ID to that objectif same_object_detected is False:self.center_points[self.id_count] = (cx, cy)objects_bbs_ids.append([x, y, w, h, self.id_count])self.id_count += 1# Clean the dictionary by center points to remove IDS not used anymorenew_center_points = {}for obj_bb_id in objects_bbs_ids:_, _, _, _, object_id = obj_bb_idcenter = self.center_points[object_id]new_center_points[object_id] = center# Update dictionary with IDs not used removedself.center_points = new_center_points.copy()return objects_bbs_ids
下载测试视频highway.mp4(download.txt中有链接):

安装ultralytics:
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
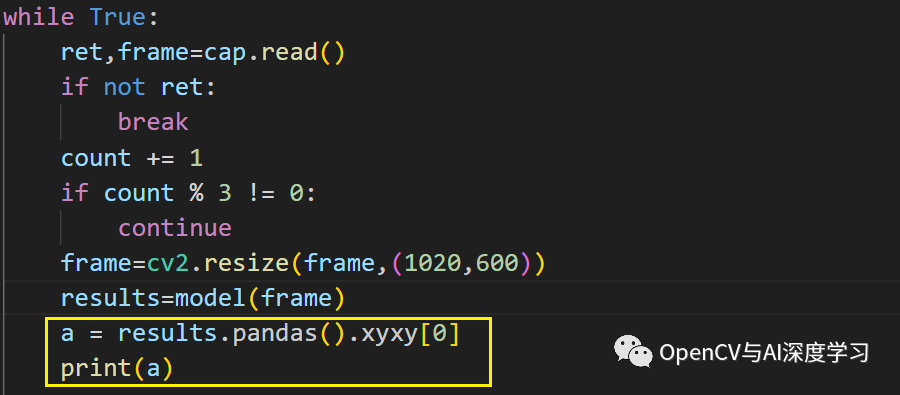
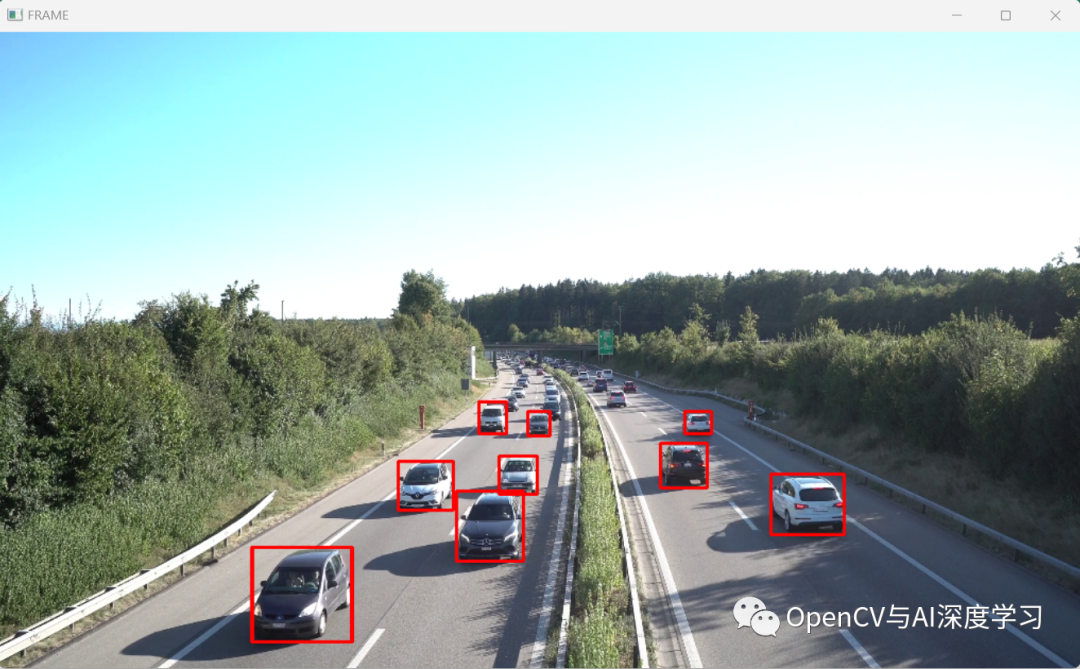
实现车辆检测
添加代码查看YoloV5模型检测输出信息:

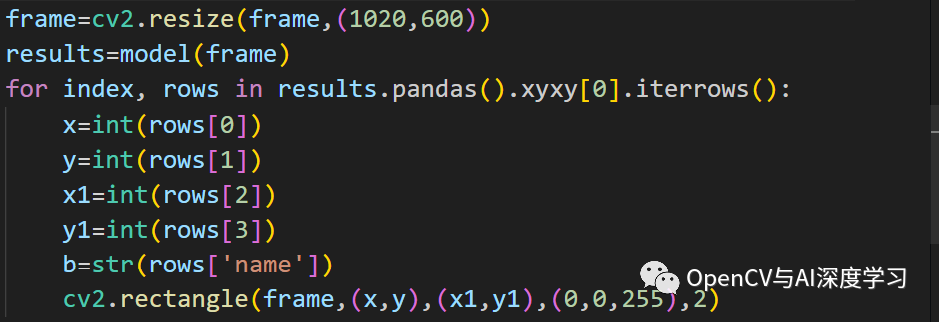
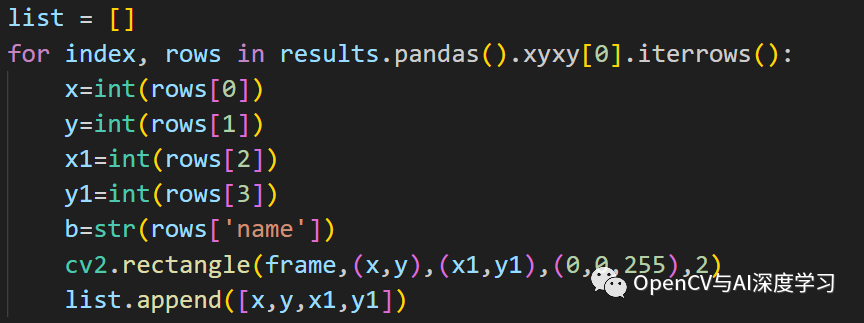
添加车辆检测结果绘制:
实现车辆跟踪
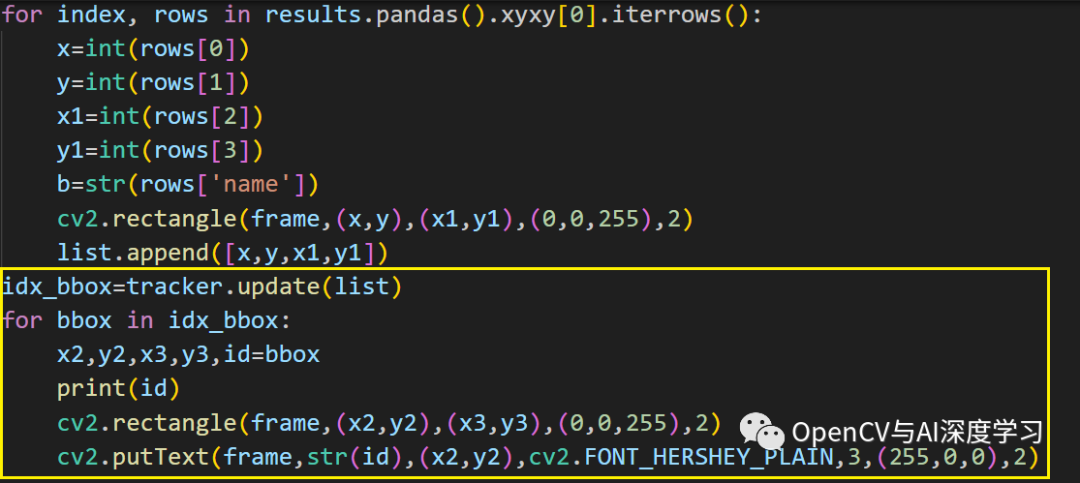
将车辆矩形坐标保存到list中:
添加对象跟踪:
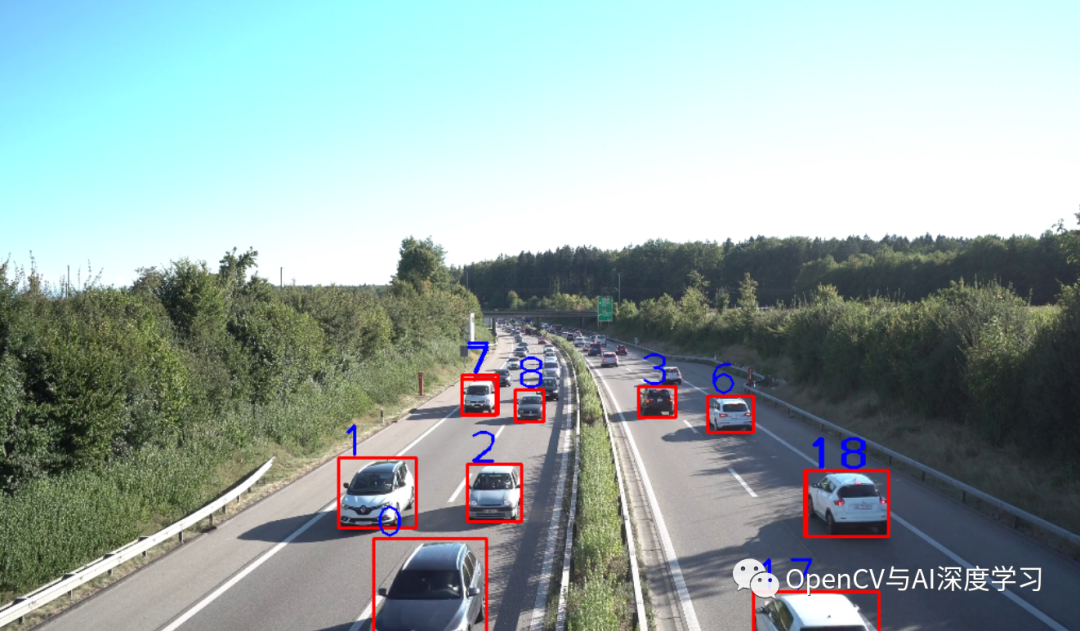
车辆跟踪效果:

实现车辆计数
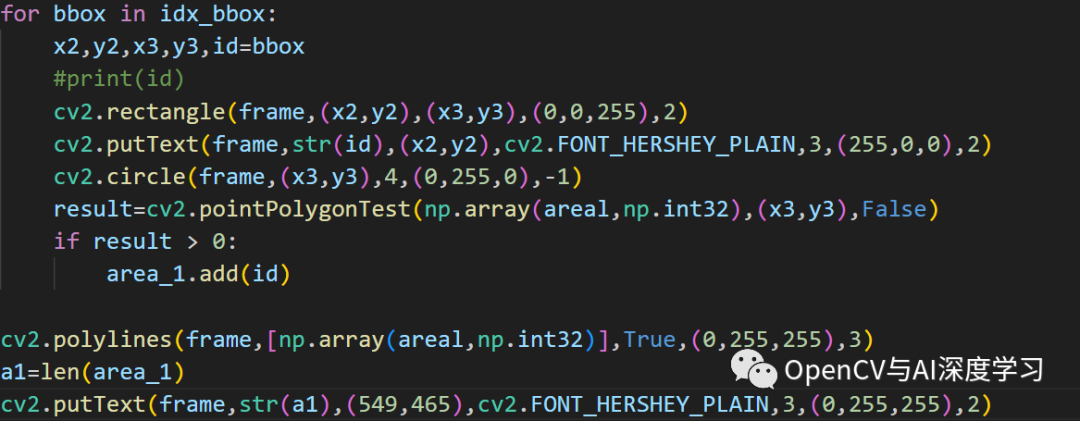
【1】划定一个多边形区域(黄色),车辆经过此区域则计数;
cv2.polylines(frame,[np.array(areal,np.int32)],True,(0,255,255),3)【2】绿色点标注车辆矩形框右下角坐标点,如下图:
cv2.circle(frame,(x3,y3),4,(0,255,0),-1)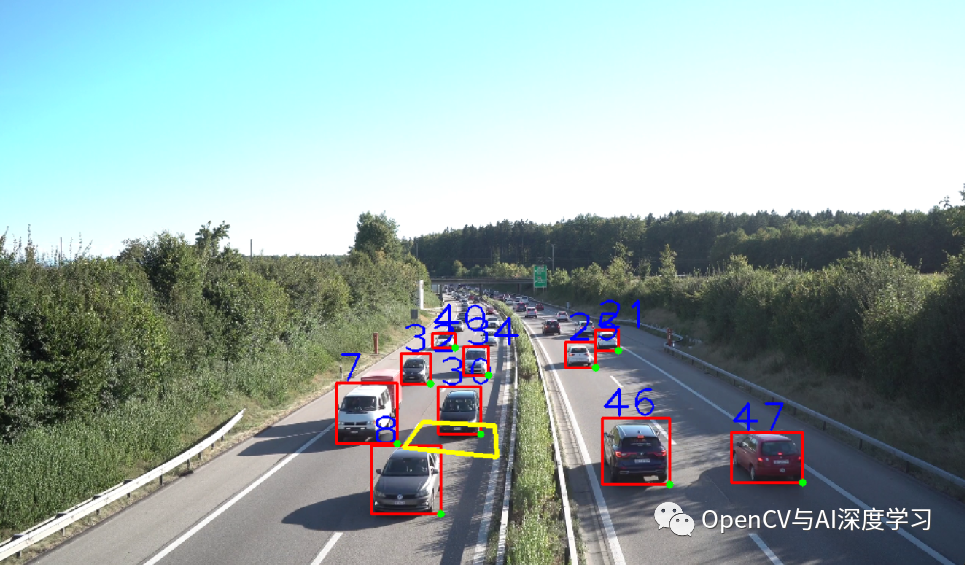
【3】计数原理:判断绿色点是否在黄色四边形内,如果在内计数+1

计算点到多边形的距离使用的是OpenCV中pointPolygonTest函数:
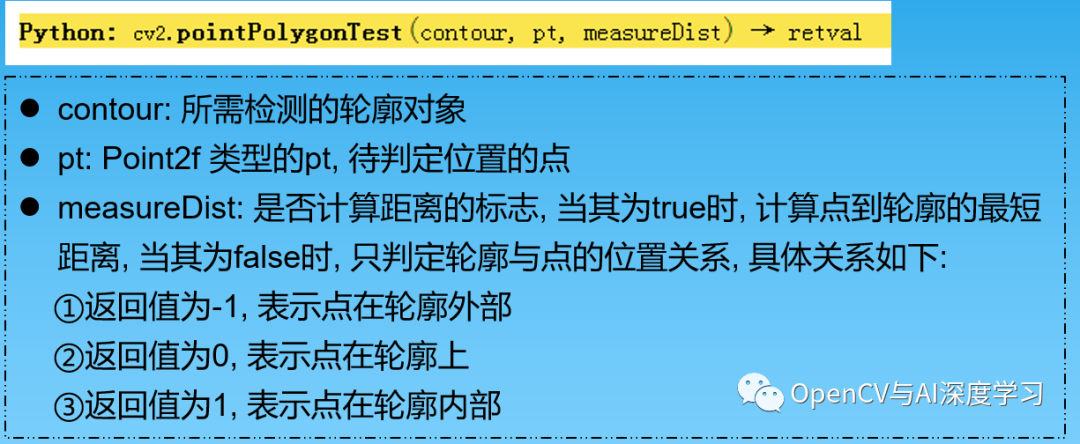
当result > 0表示点在轮廓内,也就是车辆在多边形内。此时将车辆id编号添加到集合area_1中,然后通过len(area_1)作为车辆计数值。
注意:这里为什么不直接用count += 1来计算数量?如果用count += 1会造成很多重复计数,而代码中利用了python集合的特性,add函数添加元素时,如果元素已经存在,则不重复添加,有效的避免了重复计数问题。
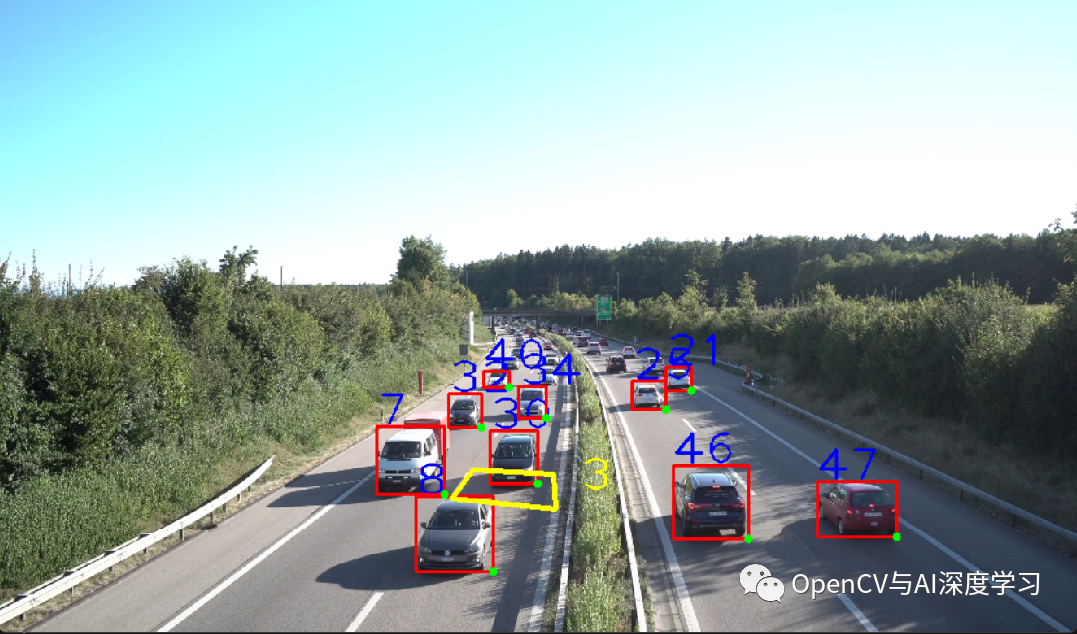
最终效果如下:
相关文章:
基于OpenCV+YOLOv5实现车辆跟踪与计数(附源码)
导 读 本文主要介绍基于OpenCVYOLOv5实现车辆跟踪与计数的应用,并给出源码。 资源下载 基础代码和视频下载地址: https://github.com/freedomwebtech/win11vehiclecount main.py代码: import cv2import torchimport numpy as npfrom tr…...

05、pytest断言确定的异常
官方用例 # content of test_sysexit.py import pytestdef f():raise SystemExit(1)def test_mytest():with pytest.raises(SystemExit):f()解读与实操 标准python raise函数可产生异常。pytest.raises可以断言某个异常会发现。异常发生了,用例执行成功&#x…...

金蝶云星空单据编辑界面,不允许批量填充操作
文章目录 金蝶云星空单据编辑界面,不允许批量填充操作案例演示开发设计测试 金蝶云星空单据编辑界面,不允许批量填充操作 案例演示 售后单,明细信息单据体,物料编码字段禁止批量填充。 开发设计 编写表单插件,在Be…...

Springboot项目启动成功后可通过五种方式继续执行
实现CommandLineRunner接口 项目初始化完毕后,才会调用方法,提供服务 Component public class StartRunner implements CommandLineRunner {Overridepublic void run(String... args) throws Exception {System.out.println("CommandLineRunner&qu…...

什么是供应链金融分账系统?
一、供应链金融的重要性 供应链金融在很多行业都是要用到,比如在抖音,快手店铺的商家资金回笼,通常需要7-21天的回款周期,这对于商家的周转来说是一件很困难的事情,在供应链金融中,分账就扮演着至关重要的角色,不仅是金融流程中的一环,更是保…...

【测绘程序设计】——坐标换带与高程投影
测绘工程中经常遇到 “坐标换带” 与 “高程投影” 问题,前者是在改变投影的分带号——即投影的中央子午线,通过 “(x,y)->(B,L)->(x,y)” 进行;而后者则是为减小投影变形(高程投影变短、高斯投影变长,详情可参考博客《测绘综合能力》真题易错本 第(37)条)通过平…...

企业计算机服务器中了Mallox勒索病毒如何解密,Mallox勒索病毒数据恢复
随着计算机技术的不断应用与发展,网络为企业的生产运营提供了极大帮助,越来越多的企业开始利用网络办公,因此,随之而来的网络安全威胁也在不断增加。近期,云天数据恢复中心陆续接到很多企业的求助,企业的计…...

一套rk3588 rtsp服务器推流的 github 方案及记录 -01
我不生产代码,我只是代码的搬运工,相信我,看完这个文章你的图片一定能变成流媒体推出去。 诉求:使用opencv拉流,转成bgr数据,需要把处理后的数据(BGR)编码成264,然后推流…...
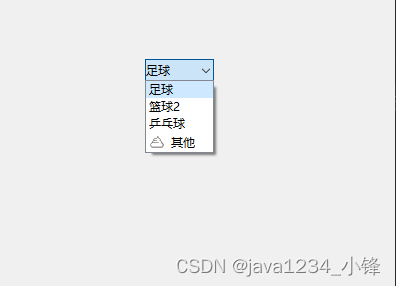
PyQt6 QComboBox下拉组合框控件
锋哥原创的PyQt6视频教程: 2024版 PyQt6 Python桌面开发 视频教程(无废话版) 玩命更新中~_哔哩哔哩_bilibili2024版 PyQt6 Python桌面开发 视频教程(无废话版) 玩命更新中~共计34条视频,包括:2024版 PyQt6 Python桌面开发 视频教程(无废话…...

常用类与比较器
常用类 学一个类,先搞清楚继承关系,再看源码 包装类Wrapper jdk5之前是手动装箱拆箱 jdk5及之后是自动装箱拆箱(调用valueOf方法(自动默认)/创建对象的构造方法,XXXvalue方法…...
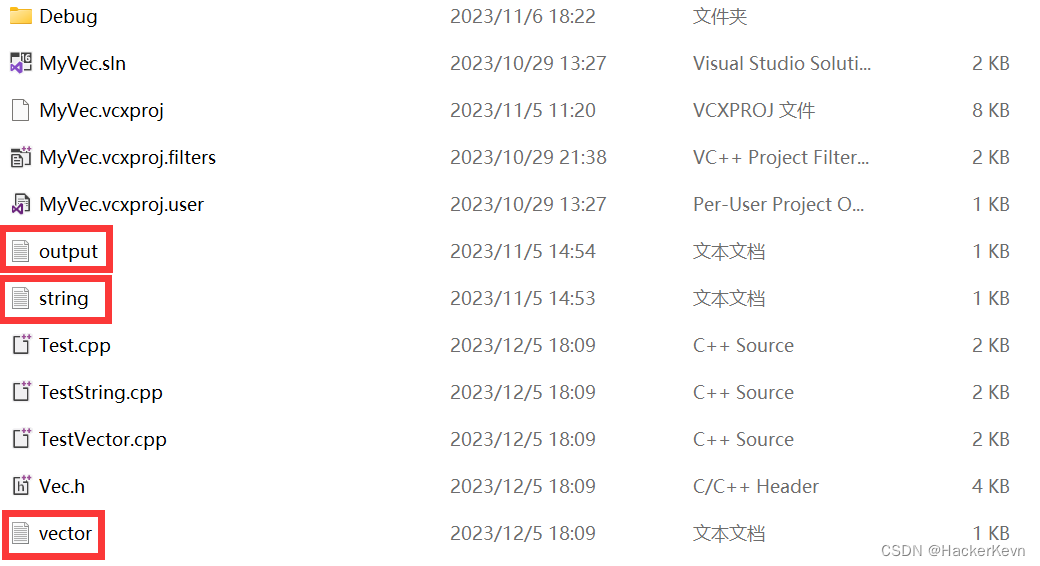
【上海大学《面向对象程序设计A》课程小项目报告】抽象向量类模板及其派生类
1 项目内容及要求 本项目通过设计一个抽象向量类模板,以及一个通用的向量类模板和一个字符串类作为其派生类,以满足各种应用场景中的数据存储和处理需求。 项目内容: 抽象向量类模板。派生向量类。派生字符串类。测试及异常处理。联合测试…...

Leetcode每日一题学习训练——Python3版(到达首都的最少油耗)
版本说明 当前版本号[20231205]。 版本修改说明20231205初版 目录 文章目录 版本说明目录到达首都的最少油耗理解题目代码思路参考代码 原题可以点击此 2477. 到达首都的最少油耗 前去练习。 到达首都的最少油耗 给你一棵 n 个节点的树(一个无向、连通、无环…...
-------连载(42))
Java面试题(每天10题)-------连载(42)
目录 Spring篇 1、Spring Bean的作用域之间有什么区别? 2、什么是Spring inner beans? 3、Spring框架中的单例Beans是线程安全的吗? 4、请举例说明如何在Spring中诸如一个Java Collection? 5、如何向Spring Bean中诸如一个J…...

netty websocket学习
【硬核】肝了一月的Netty知识点 超详细Netty入门,看这篇就够了! bzm_netty_sb netty-chat vuewebsokect实现实时聊天,可单聊、可群聊(一) vue实现聊天栏定位到最底部(超简单、可直接复制使用)…...
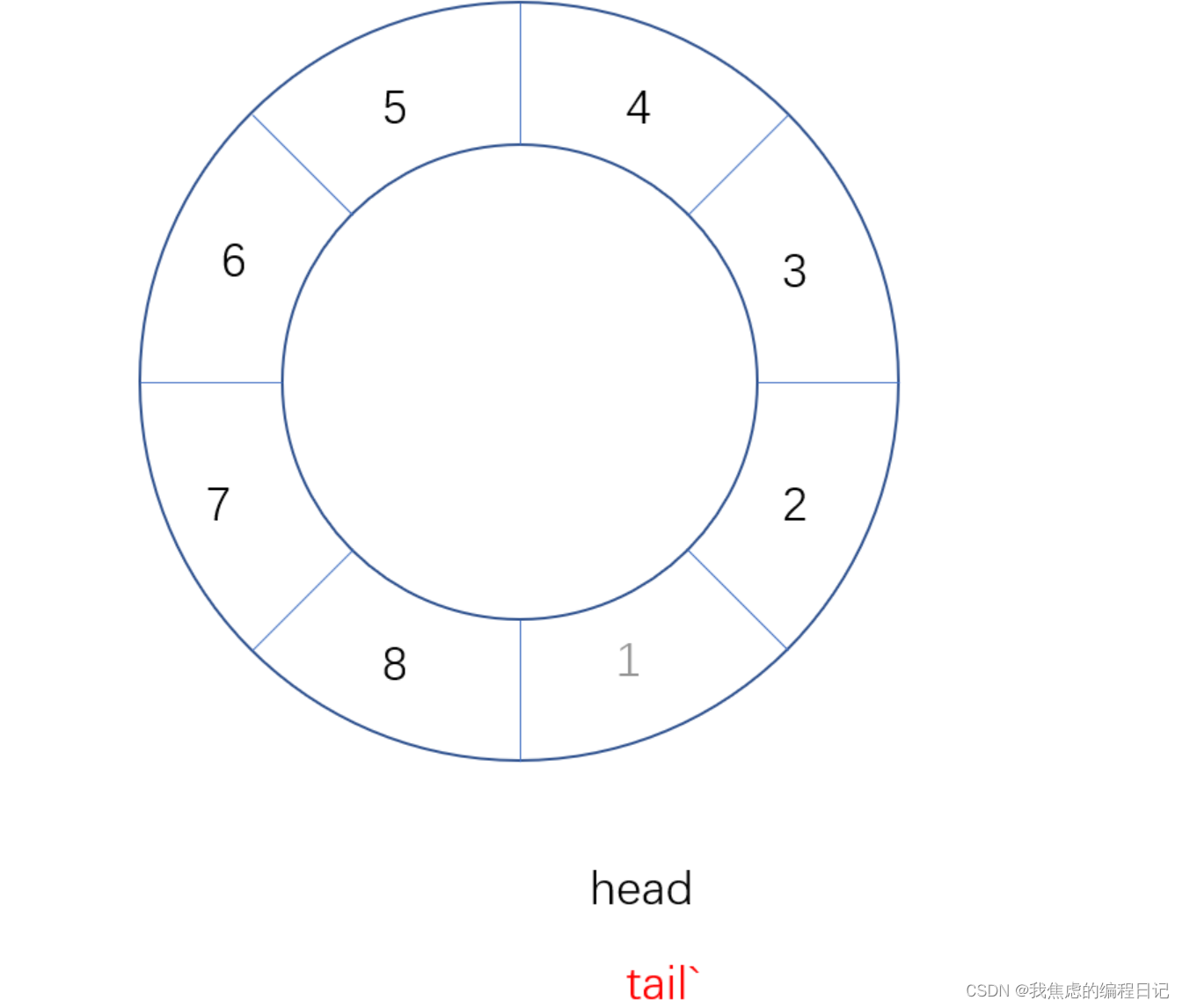
【数据结构】环形队列
环形队列 1. 定义 环形队列就是将队列在逻辑上看作环形结构、物理上仍是数组形式存储的一种数据结构。 其实现主要分为两种情况: 浪费空间法记录空间法 2. 实现 实现要考虑的是成员变量 2.1 记录空间法 使用used标识当前存储了多少元素,如果为空&a…...

嵌入式C编码规范
嵌入式C编码规范 编码规范,没有最好,只有最合适,有但不执行不如没有。 嵌入式C编码规范 https://mp.weixin.qq.com/s/z4u3YnF6vdQ1olsLeF-y_A 更多嵌入式信息请关注微信公众号【嵌入式系统】...

Golang 并发 — 流水线
并发模式 我们可以将流水线理解为一组由通道连接并由 goroutine 处理的阶段。每个阶段都被定义为执行特定的任务,并按顺序执行,下一个阶段在前一个阶段完成后开始执行。 流水线的另一个重要特性是,除了连接在一起,每个阶段都使用…...
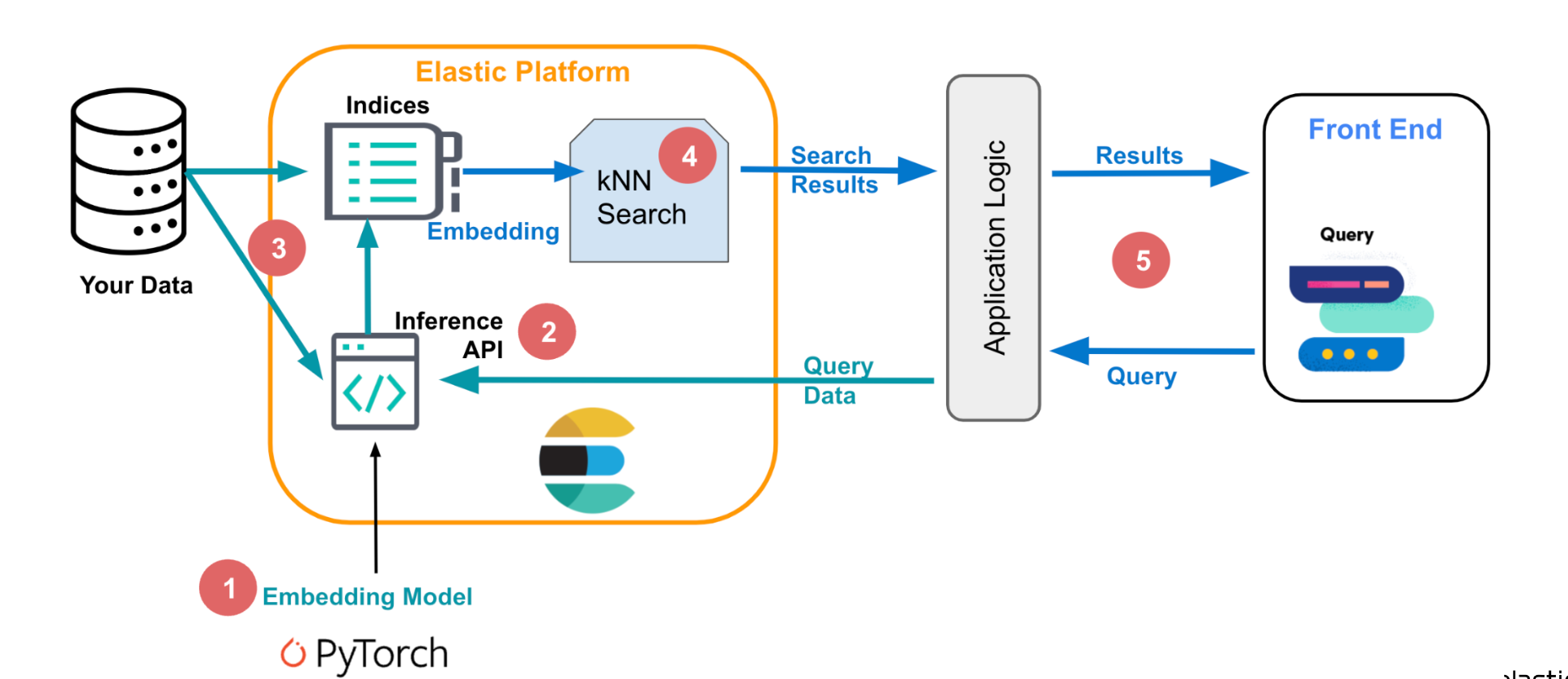
Elasticsearch:什么是非结构化数据?
非结构化数据定义 非结构化数据是指未按照设计的模型或结构组织的数据。 非结构化数据通常被归类为定性数据,可以是人类或机器生成的。 非结构化数据是最丰富的可用数据类型,经过分析后,可用于指导业务决策并在许多其他用例中实现业务目标。…...
15:00的面试,15:06就出来了,问的问题过于变态了。。。
从小厂出来,没想到在另一家公司又寄了。 到这家公司开始上班,加班是每天必不可少的,看在钱给的比较多的份上,就不太计较了。没想到5月一纸通知,所有人不准加班,加班费不仅没有了,薪资还要降40%…...

Web自动化测试怎么做?Web网页测试全流程解析
1、功能测试 web网页测试中的功能测试,主要测试网页中的所有链接、数据库连接、用于在网页中提交或获取用户信息的表单、Cookie 测试等。 (1)查看所有链接: 测试从所有页面到被测特定域的传出链接。 测试所有内部链接。 测…...

实战配置指南:5个技巧让PlayStation手柄在Windows上发挥专业级性能
实战配置指南:5个技巧让PlayStation手柄在Windows上发挥专业级性能 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows DS4Windows是一款功能强大的开源控制器兼容工具,…...

构建AI智能体技能超市:标准化工作流与多平台适配实践
1. 项目概述:一个面向AI智能体的“技能超市”如果你和我一样,每天都在和Codex、Claude、Cursor这些AI助手打交道,那你肯定也遇到过这样的场景:想让AI帮你生成一份规范的Git提交信息、自动更新文档索引,或者为一个新项目…...

为个人开源项目寻找高性价比大模型API的选型与实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为个人开源项目寻找高性价比大模型API的选型与实践 对于个人开发者或学生而言,运营一个GitHub开源项目常常需要在有限的…...

Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程
Cursor Pro永久免费使用终极指南:如何绕过试用限制完整教程 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

Taotoken官方价折扣活动对于高频用户的实际成本影响分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken官方价折扣活动对于高频用户的实际成本影响分析 1. 理解Taotoken的计费模式 Taotoken平台采用按Token消耗量计费的模式。…...

如何用DdddOcr在3分钟内构建离线验证码识别系统
如何用DdddOcr在3分钟内构建离线验证码识别系统 【免费下载链接】ddddocr 带带弟弟 通用验证码识别OCR pypi版 项目地址: https://gitcode.com/gh_mirrors/dd/ddddocr 在当今的自动化测试、数据采集和网络安全领域,验证码识别是绕不开的技术难题。传统的在线…...

感统训练的真实效果能持续多久?会不会反弹?
直接给出结论:常见的感统训练维持周期短、反弹率高,多数孩子训练效果仅能保持3-6个月。一旦停止课程,大部分孩子会逐步退回原有状态。感统只能调整身体感官反应,无法从根源提升大脑自控力,治标不治本。感统训练适用人…...

Meta发布最大视觉模型:DSG架构如何重构视觉理解范式
1. 项目概述:这不是一次普通更新,而是一次视觉理解边界的重写“Meta Just Updated the Largest Computer Vision Model in History”——这个标题乍看像科技媒体的快讯标题,但如果你在CV领域摸爬滚打过几年,第一反应不是点开链接&…...

【AI面试临阵磨枪-54】如何监控 AI 系统:成功率、延迟、Token 消耗、幻觉率、调用量
一、 面试题目面试官提问: “在大规模 Agent 系统中,你是如何建立监控体系的?请针对 成功率、延迟、Token 消耗、幻觉率、调用量 这五个核心指标,详细谈谈你的采集、分析与预警方案。”二、 知识储备1. 核心背景:AI 监…...

Dify实战指南:从零构建大模型应用与智能体开发全流程
1. 项目概述:从零到一,构建你的大模型应用开发实战手册如果你对AI应用开发感兴趣,但又觉得从零开始搭建一个能用的智能体(Agent)或者知识库问答系统门槛太高,那么你很可能已经听说过Dify这个名字。作为一个…...