Threejs之相机基础
参考资料
- 正投影相机
- …
- 相机控件MapControls
知识点
注:基于Three.jsv0.155.0
- 正投影相机
- 正投影相机-Canvas尺寸变化
- 包围盒Box3
- 地图案例(包围盒、正投影)
- 相机动画(.position和.lookAt())
- 不同方向的投影视图
- 旋转渲染结果(.up相机上方向)
- 管道漫游案例
- OrbitControls旋转缩放限制
- 相机控件MapControls
代码实现
<!DOCTYPE html>
<html lang="en">
<head><meta charset="UTF-8"><title>Three.js</title>
</head><body></body><!-- 具体路径配置,你根据自己文件目录设置,我的是课件中源码形式 --><script type="importmap">{"imports": {"three": "./js/three.module.js","three/addons/": "../three.js/examples/jsm/"}}</script><script type="module">import * as THREE from 'three';import { OrbitControls } from 'three/addons/controls/OrbitControls.js';import { MapControls } from 'three/addons/controls/MapControls.js';const width = window.innerWidthconst height = window.innerHeight// 场景const scene = new THREE.Scene();const data = [[110.3906, 34.585],[110.8301, 34.6289],[111.1816, 34.8047],[111.5332, 34.8486],[111.7969, 35.0684],[112.0605, 35.0684],[112.0605, 35.2881],[112.7637, 35.2002],[113.1152, 35.332],[113.6426, 35.6836],[113.7305, 36.3428],[114.873, 36.123],[114.9609, 36.0791],[115.1367, 36.2109],[115.3125, 36.0791],[115.4883, 36.167],[115.3125, 35.8154],[116.1035, 36.0791],[115.4883, 35.7275],[115.2246, 35.4199],[115.0488, 35.376],[114.7852, 35.0684],[115.4004, 34.8486],[115.5762, 34.585],[116.1914, 34.585],[116.1914, 34.4092],[116.543, 34.2773],[116.6309, 33.9258],[116.1914, 33.7061],[116.0156, 33.9697],[115.6641, 34.0576],[115.5762, 33.9258],[115.5762, 33.6621],[115.4004, 33.5303],[115.3125, 33.1787],[114.873, 33.1348],[114.873, 33.0029],[115.1367, 32.8711],[115.2246, 32.6074],[115.5762, 32.4316],[115.8398, 32.5195],[115.9277, 31.7725],[115.4883, 31.6846],[115.4004, 31.4209],[115.2246, 31.4209],[115.1367, 31.5967],[114.7852, 31.4648],[114.6094, 31.5527],[114.5215, 31.7725],[114.1699, 31.8604],[113.9941, 31.7725],[113.8184, 31.8604],[113.7305, 32.4316],[113.4668, 32.2998],[113.2031, 32.4316],[112.3242, 32.3438],[111.5332, 32.6074],[111.0059, 33.2666],[111.0059, 33.5303],[110.6543, 33.8379],[110.6543, 34.1455],[110.4785, 34.2334],[110.3906, 34.585]]const pointsArr = [];// 一组二维向量表示一个多边形轮廓坐标data.forEach(function(e){// data坐标数据转化为Vector2构成的顶点数组const v2 = new THREE.Vector2(e[0],e[1])pointsArr.push(v2);})// Shape表示一个平面多边形轮廓,参数是二维向量构成的数组pointsArrconst shape = new THREE.Shape(pointsArr);// 多边形shape轮廓作为ShapeGeometry参数,生成一个多边形平面几何体const geometry = new THREE.ShapeGeometry(shape);// 生成一个平面网格模型const mesh = new THREE.Mesh(geometry, new THREE.MeshBasicMaterial({color: '#0000ff',side: THREE.DoubleSide}))// 设置模型位置mesh.position.set(0, 0, 0);// 添加模型到场景scene.add(mesh);// 点光源const pointLight = new THREE.PointLight( 0xffffff, 1.0, 0, 0);pointLight.position.set(200, 200, 200 );scene.add( pointLight );// 环境光const ambientLight = new THREE.AmbientLight( 0xffffff, 1);scene.add( ambientLight );// 坐标系const axes = new THREE.AxesHelper(200);scene.add(axes);// 相机const s = 2.5;//控制left, right, top, bottom范围大小const k = width / height; //canvas画布宽高比const camera = new THREE.OrthographicCamera(-s * k, s * k, s, -s, 1, 8000);// const camera = new THREE.PerspectiveCamera(75, width/height, 0.1, 3000);// camera.position.set(300, 300, 300); // camera.lookAt(0, 0, 0); //指向坐标原点// 包围盒计算模型对象的大小和位置const box3 = new THREE.Box3();box3.expandByObject(mesh); // 计算模型包围盒const size = new THREE.Vector3();box3.getSize(size); // 计算包围盒尺寸console.log('模型包围盒尺寸',size);const center = new THREE.Vector3();box3.getCenter(center); // 计算包围盒中心坐标console.log('模型中心坐标1',center);const x = 113.51,y = 33.88;camera.position.set(x, y, 300);// 你可以看到模型相比原来上下颠倒 y坐标轴朝下camera.up.set(0,-1,0)camera.lookAt(x, y, 0);// 渲染器const renderer = new THREE.WebGLRenderer();renderer.setSize(width, height);renderer.render(scene, camera);document.body.appendChild(renderer.domElement);renderer.outputColorSpace = THREE.SRGBColorSpace;//设置为SRGB颜色空间// const controls = new OrbitControls(camera, renderer.domElement);// controls.target.set(x, y, 0); //与lookAt参数保持一致// controls.update();//update()函数内会执行camera.lookAt(controls.target)// // 左右旋转范围// controls.minAzimuthAngle = -Math.PI/2;// controls.maxAzimuthAngle = Math.PI/2;// // Vector3 {x: -49.803731395661714, y: 146.90160246353028, z: 35.47368304973255}// // Vector3 {x: -11.970638355445846, y: -51.0801205834488, z: 0.7429414745816755}// // 渲染循环// let angle = 0; //用于圆周运动计算的角度值// const R = 100; //相机圆周运动的半径// function render() {// angle += 0.01;// // 相机y坐标不变,在XOZ平面上做圆周运动// camera.position.x = R * Math.cos(angle);// camera.position.z = R * Math.sin(angle);// renderer.render(scene, camera);// camera.lookAt(0,0,0);// // console.log('🚀 ~ file: 6.加载外部三维模型.html:70 ~ render ~ camera:', camera.position) // 鼠标左键改变相机位置// // console.log('🚀 ~ file: 6.加载外部三维模型.html:66 ~ controls:', controls.target) // 鼠标右键改变相机观察点// requestAnimationFrame(render);// }// // render();// 控制器// controls.addEventListener('change', () => {// // 因为动画渲染了,所以这里可以省略// renderer.render(scene, camera);// });const controls = new MapControls(camera, renderer.domElement);controls.addEventListener('change', function () {// 鼠标右键旋转时候,查看.position变化// 鼠标左键拖动的时候,查看.position、.target的位置会变化console.log('camera.position',camera.position);console.log('controls.target',controls.target);});</script>
</html>
相关文章:

Threejs之相机基础
参考资料 正投影相机…相机控件MapControls 知识点 注:基于Three.jsv0.155.0 正投影相机正投影相机-Canvas尺寸变化包围盒Box3地图案例(包围盒、正投影)相机动画(.position和.lookAt())不同方向的投影视图旋转渲染结果(.up相机上方向)管道漫游案例OrbitControls…...

2024SIA上海国际轴承工业展览会 ▎参行业盛会 展轴研风采
2024SIA上海国际轴承工业展览会 内容:1、轴承制品展区:2、轴承设备展区:3、轴承零件展区: 国际轴承展丨轴承工业展丨轴承装备展丨上海轴承展丨上海轴承工业展丨上海轴承装备展 2024上海国际轴承工业展览会将会于2024年7月24-26日…...

SQLMap介绍
预计更新SQL注入概述 1.1 SQL注入攻击概述 1.2 SQL注入漏洞分类 1.3 SQL注入攻击的危害 SQLMap介绍 2.1 SQLMap简介 2.2 SQLMap安装与配置 2.3 SQLMap基本用法 SQLMap进阶使用 3.1 SQLMap高级用法 3.2 SQLMap配置文件详解 3.3 SQLMap插件的使用 SQL注入漏洞检测 4.1 SQL注入…...

平头哥玄铁系列 RISC-V 芯片及开发板
1、玄铁 9 系列概述 玄铁 8 系列 基于C-SKY架构,玄铁 9 系列基于 RISC-V 架构。E 系列为 RISC-V 32 位,C 系列为 RISC-V 64 位。 E902:超低功耗 RSIC-V 架构处理器 E902 采用 2 级极简流水线兼容 RISC-V 架构且对执行效率等方面进行了增强&a…...

Android 删除浏览器导航页面修改默认主页
Android 删除浏览器导航页面修改默认主页 近来收到客户需求反馈,需要删除浏览器导航页面并将百度设置为默认主页,具体修改参照如下: 删除浏览器导航页面: /vendor/mediatek/proprietary/packages/apps/Browser/src/com/android…...
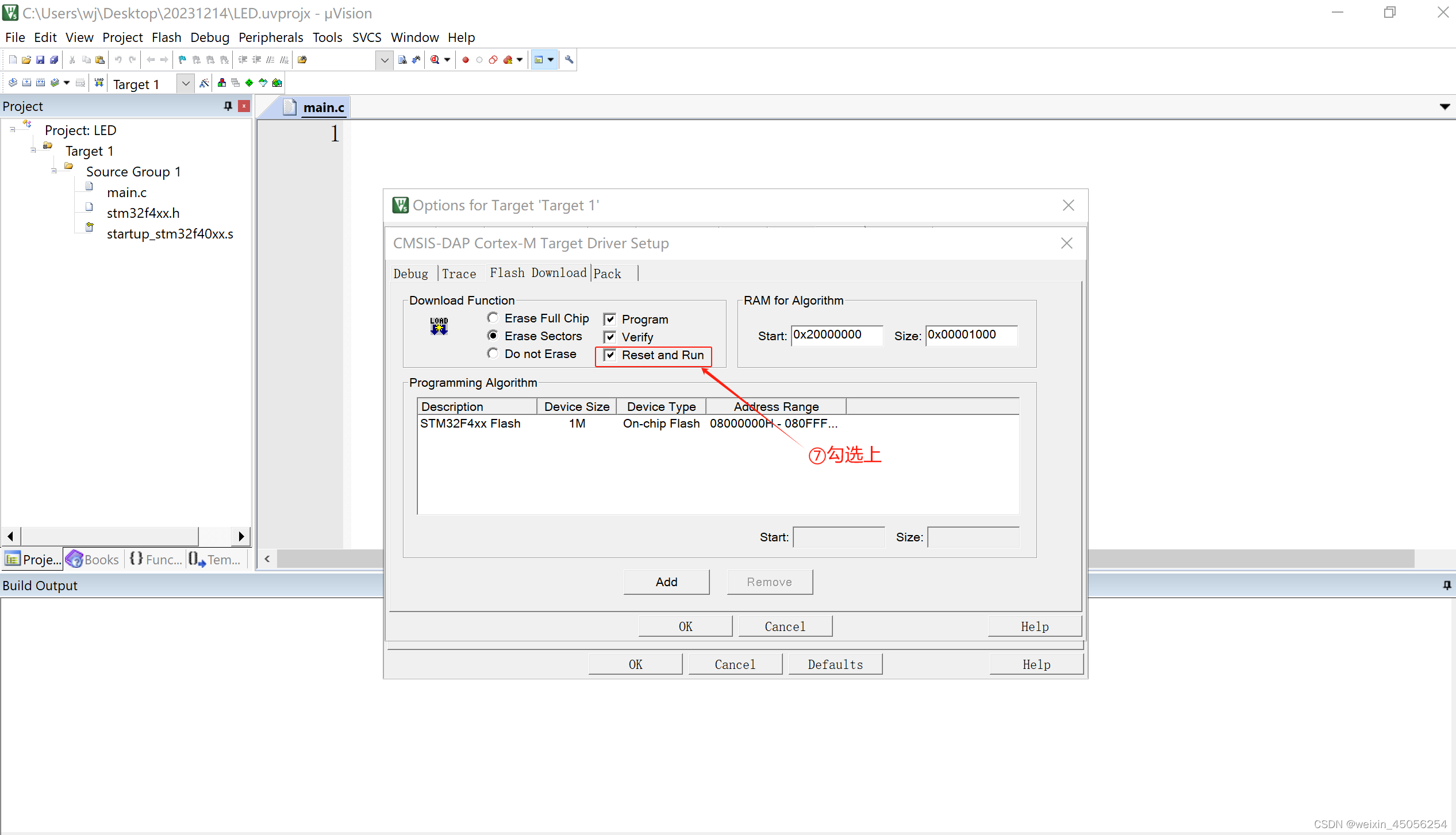
【Stm32-F407】Keil uVision5 下新建工程
①双击鼠标左键打开Keil uVision5,选择 Project 下的 New uVision Project ; ②在期望的文件夹下创建一个工程,并按如下要求操作; ③添加文件类型,按如下要求操作 ④如有需要可添加相关启动文件在工程文件夹下并添加到…...

linux中文件服务器NFS和FTP服务
文件服务器 NFSNFS介绍配置nfs文件共享服务端客户端 FTPftp介绍FTP基础ftp主动模式ftp被动模式 Vsftp 服务器简介vsftpd配置安装vsftpd[ftp的服务端]编辑配置文件匿名用户设置创建本地用户使用ftp服务 客户端操作匿名用户登录本地用户登录lftp服务 NFS NFS介绍 文件系统级别共…...

茶室茶楼计时计费软件,软件中的商品管理计时操作教程
一、前言 茶室在营业的时候,不但需要计时间,同时还需要管理商品入库出库库存等管理。这就需要一款实用的操作简单的管理软件。 下面以 佳易王茶社计时计费软件V18.0为例说明,其他版本可以参考本教程。 软件下载或技术支持可以点击最下方官…...
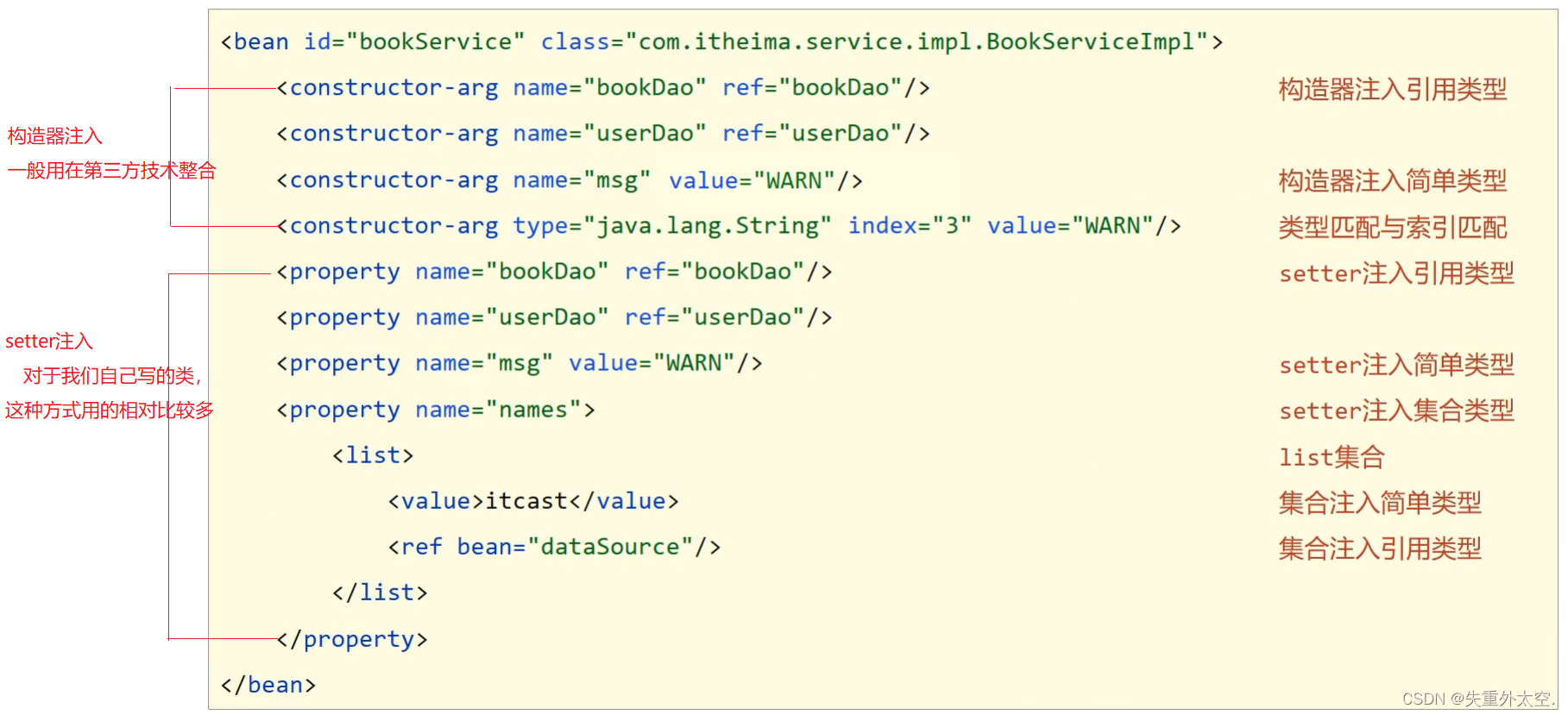
从入门到精通:掌握Spring IOC/DI配置管理第三方bean的技巧
IOC/DI配置管理第三方bean 1.1 案例:数据源对象管理1.1.1 环境准备1.1.2 思路分析1.1.3 实现Druid管理步骤1:导入druid的依赖步骤2:配置第三方bean步骤3:从IOC容器中获取对应的bean对象步骤4:运行程序 1.1.4 实现C3P0管理步骤1:导入C3P0的依赖步骤2:配置第三方bean步骤3:运行程…...
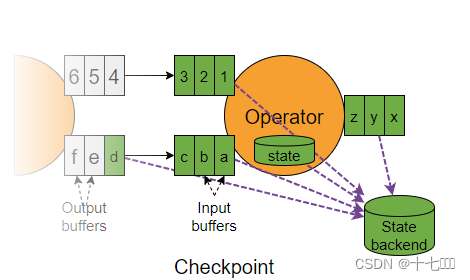
Flink的容错机制
容错机制 容错:指出错后不影响数据的继续处理,并且恢复到出错前的状态。 检查点:用存档读档的方式,将之前的某个时间点的所有状态保存下来,故障恢复继续处理的结果应该和发送故障前完全一致,这就是所谓的检…...
)
GO设计模式——11、装饰器模式(结构型)
目录 装饰器模式(Decorator Pattern) 装饰器模式的核心角色: 优缺点 使用场景 代码实现 装饰器模式(Decorator Pattern) 装饰器模式(Decorator Pattern)允许向一个现有的对象添加新的功…...
全志V3s之U-Boot
1、安装交叉编译器: ARM交叉编译器的官网:交叉编译器 a、使用wget下载: wget https://releases.linaro.org/components/toolchain/binaries/latest/arm-linux-gnueabihf/gcc-linaro-6.3.1-2017.05-x86_64_arm-linux-gnueabihf.tar.xzb、解…...

【华为OD】依据用户输入的单词前缀,从已输入的英文语句中联想出用户想输入的单词,按字典序输出联想到的单词序列
题目描述主管期望你来实现英文输入法单词联想功能需求如下:依据用户输入的单词前缀,从已输入的英文语句中联想出用户想输入的单词,按字典序输出联想到的单词序列,如果联想不到,请输出用户输入的单词前缀注意1.英文单词联想时,区分大小写2.缩略形式如"dont",判定…...

CentOS 7.9安装宝塔面板,安装gitlab服务器
docker安装方式比较慢,安装包1.3GB 安装后启动很慢 docker logs q18qgztxdvozdv_gitlab-ce-gitlab-1 docker ps docker exec -it q18qgztxdvozdv_gitlab-ce-gitlab-1 sh cd /etc/gitlab cat initial_root_password 软件商店安装方式,失败了2023.12…...
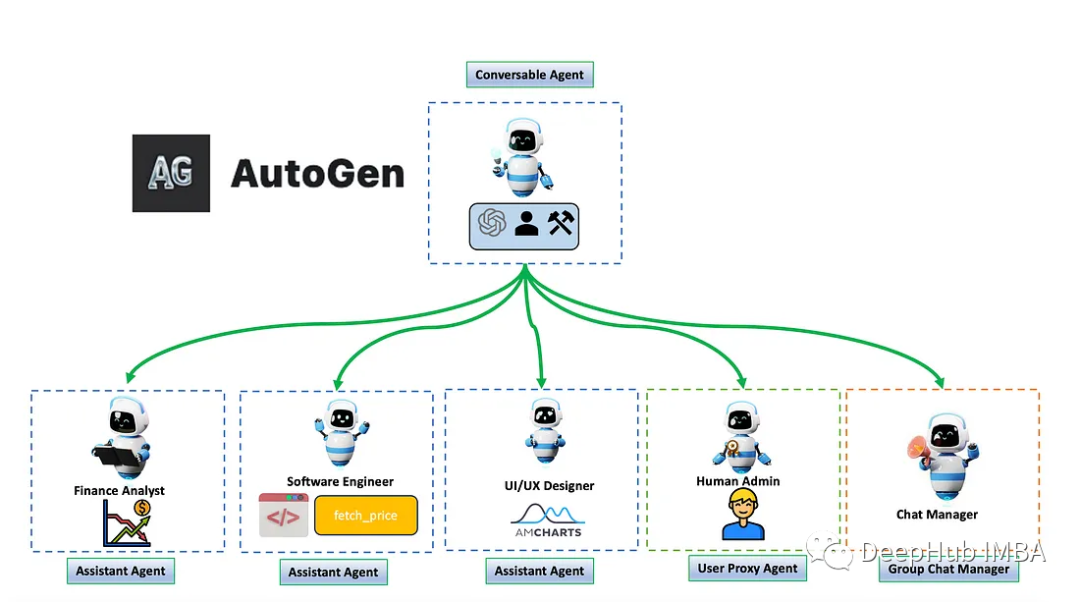
AutoGen多代理对话项目示例和工作流程分析
在这篇文章中,我将介绍AutoGen的多个代理的运行。这些代理将能够相互对话,协作评估股票价格,并使用AmCharts生成图表。 我们创建对话的目的是要求代理分析特定公司的股票价格,并制作股票价格图表。 为了实现这一目标,…...

多维时序 | MATLAB实现RIME-CNN-LSTM-Multihead-Attention多头注意力机制多变量时间序列预测
多维时序 | MATLAB实现RIME-CNN-LSTM-Multihead-Attention多头注意力机制多变量时间序列预测 目录 多维时序 | MATLAB实现RIME-CNN-LSTM-Multihead-Attention多头注意力机制多变量时间序列预测预测效果基本介绍模型描述程序设计参考资料 预测效果 基本介绍 MATLAB实现RIME-CNN-…...

使用高防IP防护有哪些优势
高防IP是针对互联网服务器在遭受大流量的DDoS攻击后导致服务不可用的情况下,推出的付费增值服务,用户可以通过配置高防IP,将攻击流量引流到高防IP,确保源站的稳定可靠。高防IP相当于搭建完转发的服务器。 高防IP有两种接入方式&a…...

android-xml语法
xml解析器 Android的XML文件语法是由Android系统中的解析器解析的。具体来说,Android使用了一个名为"Android Asset Packaging Tool (AAPT)"的工具来解析和处理XML文件。AAPT负责将XML文件编译为二进制格式,并在构建过程中将其打包到Android应…...
【银行测试】第三方支付平台业务流,功能/性能/安全测试方法...
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、第三方支付平台…...

全志V3s之显示当前文件路径
新移植的kernel和根文件系统,其终端显示只有一个#号,不方便查看,更改以下配置,使得可以显示全路径。修改如下: export PS1[\u\h \w]\$这个是即时生效的,所以如果要重启或者重新打开窗口也生效的话就要把这…...

5分钟免费制作专业AI翻唱:AICoverGen完整指南
5分钟免费制作专业AI翻唱:AICoverGen完整指南 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想让AI帮你翻唱…...

Zotero插件市场:三步快速上手的插件管理神器
Zotero插件市场:三步快速上手的插件管理神器 【免费下载链接】zotero-addons Zotero Add-on Market | Zotero插件市场 | Browsing, installing, and reviewing plugins within Zotero 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-addons 想象一下&a…...

mnestra:基于ESBuild的极简前端构建工具,速度与体验的完美平衡
1. 项目概述:一个被低估的现代前端构建工具如果你在前端开发领域摸爬滚打超过五年,大概率经历过从 Grunt、Gulp 到 Webpack 的构建工具变迁史。每次工具的迭代,都伴随着配置文件的日益复杂和构建速度的微妙下降。当 Vite 携 ES Module 原生支…...

在线Graphviz图表编辑器:3步创建专业技术流程图
在线Graphviz图表编辑器:3步创建专业技术流程图 【免费下载链接】GraphvizOnline Lets Graphviz it online 项目地址: https://gitcode.com/gh_mirrors/gr/GraphvizOnline 还在为复杂的技术图表绘制而烦恼吗?GraphvizOnline作为一款革命性的在线G…...
)
【限时公开】后印象派专属--ar 16:9 --style raw --stylize 800参数组合包(含塞尚构图/修拉点彩/劳特累克动态线共12套已验证prompt模板)
更多请点击: https://intelliparadigm.com 第一章:后印象派艺术精神与Midjourney风格迁移的本质逻辑 后印象派并非对印象派的简单延续,而是对主观表达、结构重构与象征张力的自觉回归——梵高旋转的星云、塞尚凝练的几何体、高更原始的色域&…...

All in Token,三个运营商建Token工厂,中国移动跟进Token经营 三大运营商争夺AI阵地
随着Token(词元)经营战略的密集落地,三大运营商在AI领域的竞争愈发激烈。在日前举行的2026移动云大会上,中国移动正式发布了Token运营生态体系与移动模型服务平台MoMA,宣布接入超300款模型,并通过Token集约…...

百度网盘直链解析工具:告别限速,实现高速下载的Python解决方案
百度网盘直链解析工具:告别限速,实现高速下载的Python解决方案 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 在数字资源共享日益频繁的今天ÿ…...

Biomni项目解析:大语言模型与生物医学知识图谱融合实践
1. 项目概述:当大语言模型遇见生物医学知识图谱最近在探索如何让大语言模型(LLM)在专业领域,特别是生物医学这种信息密集、关系复杂的领域,变得更“靠谱”一点。相信很多同行都遇到过类似的问题:直接问Chat…...

天学网口碑好不好?2026年最新用户实测反馈给你答案
作为深耕教育数字化落地领域5年的从业者,最近后台收到不少公立校电教组老师、学生家长的提问:主打AI英语教学的天学网口碑到底怎么样?刚好我们团队刚做完2026年第一季度的英语教育数字化工具落地效果调研,结合一手实测数据给大家客…...

Cursor编辑器性能优化:精准重置缓存与进程的开发者效率工具
1. 项目概述:一个被低估的开发者效率工具如果你是一名开发者,尤其是深度使用 Cursor 这类 AI 驱动的代码编辑器,那么你一定遇到过这样的场景:编辑器突然变得卡顿、代码补全失灵、AI 建议变得驴唇不对马嘴,或者插件行为…...