朴素贝叶斯法_naive_Bayes
朴素贝叶斯法(naive Bayes)是基于贝叶斯定理与特征条件独立假设的分类方法。对于给定的训练数据集,首先基于特征条件独立假设学习输入输出的联合概率分布;然后基于此模型,对给定的输入 x x x,利用贝叶斯定理求出后验概率最大的输出 y y y。
基本方法:
设输入空间 X ⊆ R n X\subseteq R^n X⊆Rn为 n n n维向量的集合,输出空间为类标记集合 Y = { c 1 , c 2 , . . . , c k } Y=\{c_1,c_2,...,c_k\} Y={c1,c2,...,ck}。输入为特征向量 x ∈ X x\in X x∈X,输出为类标记 y ∈ Y y\in Y y∈Y。 X X X是定义在输入空间 X X X上的随机向量, Y Y Y是定义在输出空间 Y Y Y上的随机变量。 P ( X , Y ) P(X,Y) P(X,Y)是 X X X和 Y Y Y的联合概率分布。训练集 T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) } T=\{(x_1,y_1),(x_2,y_2),...,(x_N,y_N)\} T={(x1,y1),(x2,y2),...,(xN,yN)}由 P ( X , Y ) P(X,Y) P(X,Y)独立同分布产生。
朴素贝叶斯算法就是通过训练数据集学习联合概率分布 P ( X , Y ) P(X,Y) P(X,Y)。
具体地,学习以下先验概率分布及条件概率分布。
先验概率分布: P ( Y = C k ) , k = 1 , 2 , . . . , K P(Y=C_k), \quad k=1,2,...,K P(Y=Ck),k=1,2,...,K;
条件概率分布: P ( X = x ∣ Y = C k ) = P ( X ( 1 ) = x ( 1 ) , . . . , X ( n ) = x ( n ) ∣ Y = C k ) , k = 1 , 2 , . . . , K P(X=x|Y=C_k)=P(X^{(1)}=x^{(1)},...,X^{(n)}=x^{(n)}|Y=C_k),\quad k=1,2,...,K P(X=x∣Y=Ck)=P(X(1)=x(1),...,X(n)=x(n)∣Y=Ck),k=1,2,...,K。
由于条件概率分布 P ( X = x ∣ Y = C k ) P(X=x|Y=C_k) P(X=x∣Y=Ck)由指数级数量的参数,其估计实际是不可能的。事实上,假设特征 X ( j ) X^{(j)} X(j)可能的取值有 S j S_j Sj个, j = 1 , 2 , . . . , n j=1,2,...,n j=1,2,...,n, Y Y Y可能取值有 K K K个,那么参数个数为 K ∏ j = 1 n S j K\prod_{j=1}^{n}S_j K∏j=1nSj个。
于是朴素贝叶斯算法对条件概率分布作出了条件独立性的假设。这是一个非常强的假设,等于是说用于分类的特征在类确定的条件下都是条件独立的,具体地,条件独立性假设是
P ( X = x ∣ Y = C k ) = P ( X ( 1 ) = x ( 1 ) , . . . , X ( n ) = x ( n ) ∣ Y = C k ) P(X=x|Y=C_k)=P(X^{(1)}=x^{(1)},...,X^{(n)}=x^{(n)}|Y=C_k) P(X=x∣Y=Ck)=P(X(1)=x(1),...,X(n)=x(n)∣Y=Ck)
= ∏ j = 1 n P ( X ( j ) = x ( j ) ∣ Y = C k ) \qquad \quad =\prod_{j=1}^{n}P(X^{(j)}=x^{(j)}|Y=C_k) =j=1∏nP(X(j)=x(j)∣Y=Ck)
朴素贝叶斯算法在进行分类时,对给定的输入 x x x,通过学习到的模型计算后验概率分布 P ( Y = C k ∣ X = x ) P(Y=C_k|X=x) P(Y=Ck∣X=x),然后将后验概率最大的类作为 x x x的输出。后验概率计算根据贝叶斯定理进行:
P ( Y = C k ∣ X = x ) = P ( X = x ∣ Y = C k ) P ( Y = C k ) ∑ k P ( X = x ∣ Y = C k ) P ( Y = C k ) P(Y=C_k|X=x)=\frac{P(X=x|Y=C_k)P(Y=C_k)}{\sum_{k}P(X=x|Y=C_k)P(Y=C_k)} P(Y=Ck∣X=x)=∑kP(X=x∣Y=Ck)P(Y=Ck)P(X=x∣Y=Ck)P(Y=Ck)
= P ( Y = C k ) ∏ j P ( X ( j ) = x ( j ) ∣ Y = C k ) ∑ k P ( Y = C k ) ∏ j P ( X ( j ) = x ( j ) ∣ Y = C k ) \qquad \qquad \qquad \qquad=\frac{P(Y=C_k)\prod_{j}P(X^{(j)}=x^{(j)}|Y=C_k)}{\sum_{k}P(Y=C_k)\prod_{j}P(X^{(j)}=x^{(j)}|Y=C_k)} =∑kP(Y=Ck)∏jP(X(j)=x(j)∣Y=Ck)P(Y=Ck)∏jP(X(j)=x(j)∣Y=Ck)
于是,朴素贝叶斯分类器可表示为
y = f ( x ) = a r g max C k P ( Y = C k ) ∏ j P ( X ( j ) = x ( j ) ∣ Y = C k ) ∑ k P ( Y = C k ) ∏ j P ( X ( j ) = x ( j ) ∣ Y = C k ) y=f(x)=arg\max_{C_k}\frac{P(Y=C_k)\prod_{j}P(X^{(j)}=x^{(j)}|Y=C_k)}{\sum_{k}P(Y=C_k)\prod_{j}P(X^{(j)}=x^{(j)}|Y=C_k)} y=f(x)=argCkmax∑kP(Y=Ck)∏jP(X(j)=x(j)∣Y=Ck)P(Y=Ck)∏jP(X(j)=x(j)∣Y=Ck)
由于分母对所有的类都是相同的,所以
y = f ( x ) = a r g max C k P ( Y = C k ) ∏ j P ( X ( j ) = x ( j ) ∣ Y = C k ) y=f(x)=arg\max_{C_k}P(Y=C_k)\prod_{j}P(X^{(j)}=x^{(j)}|Y=C_k) y=f(x)=argCkmaxP(Y=Ck)j∏P(X(j)=x(j)∣Y=Ck)
算法:
输入:训练集 T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , . . . , ( x N , y N ) } T=\{(x_1,y_1),(x_2,y_2),...,(x_N,y_N)\} T={(x1,y1),(x2,y2),...,(xN,yN)},其中 x i = ( x i ( 1 ) , x i ( 2 ) , . . . , x i ( n ) ) T x_i=(x_i^{(1)},x_i^{(2)},...,x_i^{(n)})^T xi=(xi(1),xi(2),...,xi(n))T, x i ( j ) x_i^{(j)} xi(j)是第 i i i个样本的第 j j j个特征, x i ( j ) ∈ { a j 1 , a j 2 , . . . , a j S j } x_i^{(j)} \in \{a_{j1},a_{j2},...,a_{jS_j}\} xi(j)∈{aj1,aj2,...,ajSj}, a j l a_{jl} ajl是第 j j j个特征可能取的第 l l l个值, j = 1 , 2 , . . . , n j=1,2,...,n j=1,2,...,n, l = 1 , 2 , . . . , S j l=1,2,...,S_j l=1,2,...,Sj, y i ∈ { C 1 , C 2 , . . . , C k } y_i \in \{C_1,C_2,...,C_k\} yi∈{C1,C2,...,Ck};实例 x x x。
输出:实例 x x x的分类。
- 计算先验概率及条件概率
P ( Y = C k ) = ∑ i = 1 N I ( y i = C k ) N , k = 1 , 2 , . . . , k P(Y=C_k)=\frac{\sum_{i=1}^{N}I(y_i=C_k)}{N}, \qquad k=1,2,...,k P(Y=Ck)=N∑i=1NI(yi=Ck),k=1,2,...,k
P ( X ( j ) = a j l ∣ Y = C k ) = ∑ i = 1 N I ( x ( j ) = a j l , y i = C k ) ∑ i = 1 N I ( y i = C k ) P(X^{(j)}=a_{jl}|Y=C_k)=\frac{\sum_{i=1}^{N}I(x^{(j)}=a_{jl},y_i=C_k)}{\sum_{i=1}^{N}I(y_i=C_k)} P(X(j)=ajl∣Y=Ck)=∑i=1NI(yi=Ck)∑i=1NI(x(j)=ajl,yi=Ck)
j = 1 , 2 , . . . , n ; l = 1 , 2 , . . . , S j ; k = 1 , 2 , . . . , K \qquad j=1,2,...,n; \quad l=1,2,...,S_j; \quad k=1,2,...,K j=1,2,...,n;l=1,2,...,Sj;k=1,2,...,K- 对于给定实例 x = ( x ( 1 ) , x ( 2 ) , . . . , x ( n ) ) T x={(x^{(1)},x^{(2)},...,x^{(n)})}^T x=(x(1),x(2),...,x(n))T,计算(这里用到了特征条件独立假设)
P ( Y = C k ) ∏ j = 1 n P ( X ( j ) = x ( j ) ∣ Y = C k ) , k = 1 , 2 , . . . , K P(Y=C_k)\prod_{j=1}^{n}P(X^{(j)}=x^{(j)}|Y=C_k),\qquad k=1,2,...,K P(Y=Ck)j=1∏nP(X(j)=x(j)∣Y=Ck),k=1,2,...,K- 确定实例 x x x的分类
y = a r g max C k P ( Y = C k ) ∏ j = 1 n P ( X ( j ) = x ( j ) ∣ Y = C k ) y=arg\max_{C_k}P(Y=C_k)\prod_{j=1}^{n}P(X^{(j)}=x^{(j)}|Y=C_k) y=argCkmaxP(Y=Ck)j=1∏nP(X(j)=x(j)∣Y=Ck)
相关文章:

朴素贝叶斯法_naive_Bayes
朴素贝叶斯法(naive Bayes)是基于贝叶斯定理与特征条件独立假设的分类方法。对于给定的训练数据集,首先基于特征条件独立假设学习输入输出的联合概率分布;然后基于此模型,对给定的输入 x x x,利用贝叶斯定理…...
Windows下安装MongoDB实践总结
本文记录Windows环境下的MongoDB安装与使用总结。 【1】官网下载 官网下载地址:Download MongoDB Community Server | MongoDB 这里可以选择下载zip或者msi,zip是解压后自己配置,msi是傻瓜式一键安装。这里我们分别对比进行实践。 【2】ZI…...
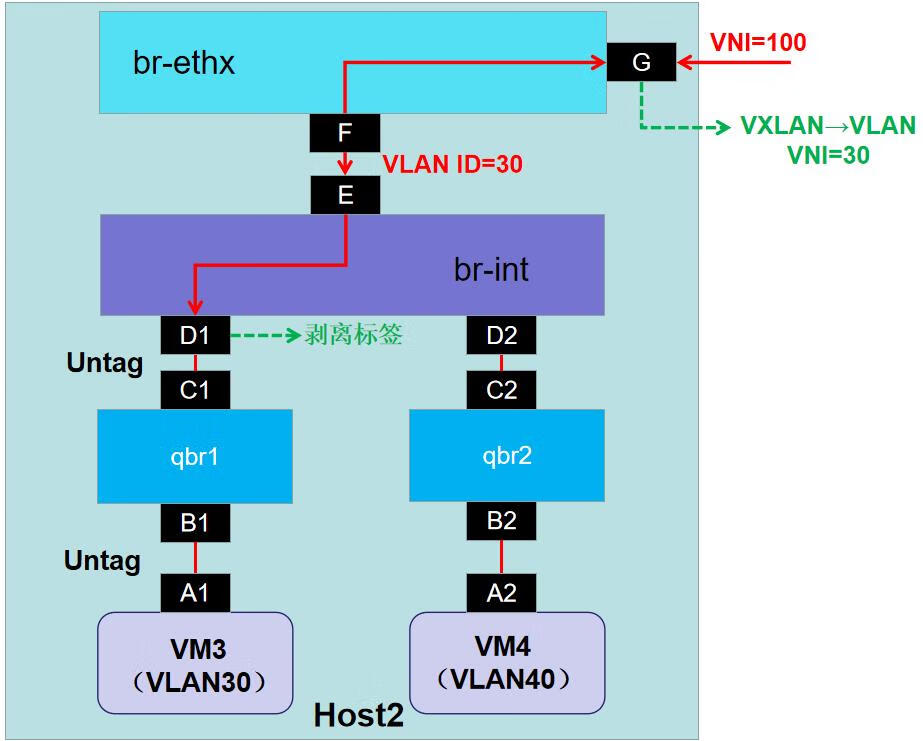
华为云Stack 8.X 流量模型分析(二)
二、流量模型分析相关知识 1.vNIC 虚拟网络接口卡(vNIC)是基于主机物理 NIC 的虚拟网络接口。每个主机可以有多个 NIC,每个 NIC 可以是多个 vNIC 的基础。 将 vNIC 附加到虚拟机时,Red Hat Virtualization Manager 会在虚拟机之间创建多个关联的…...
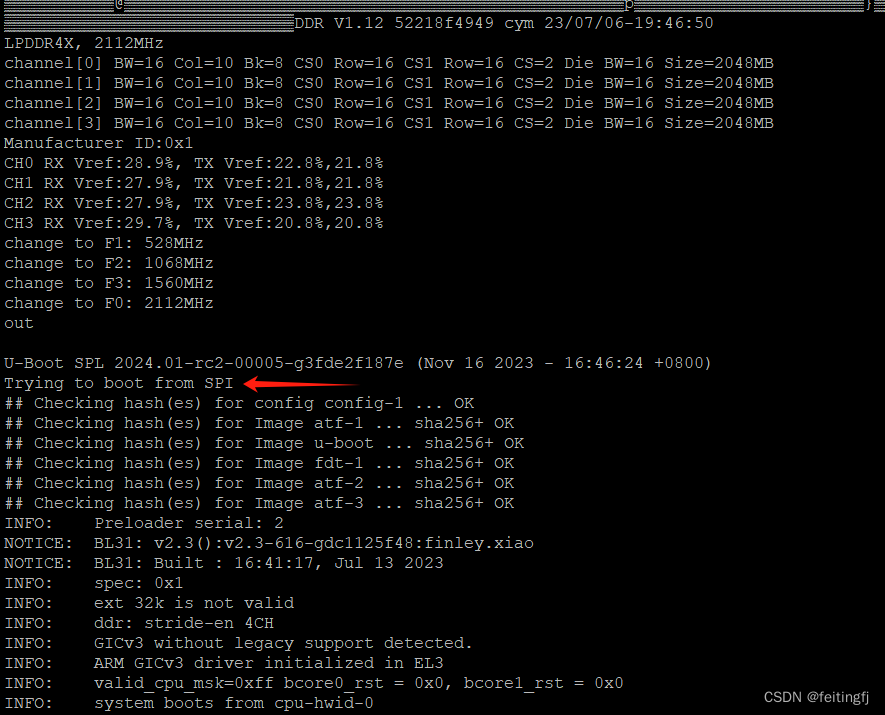
rk3588 之启动
目录 uboot版本配置修改编译 linux版本配置修改编译 启动sd卡启动制作spi 烧录 参考 uboot 版本 v2024.01-rc2 https://github.com/u-boot/u-boot https://github.com/rockchip-linux/rkbin 配置修改 使用这两个配置即可: orangepi-5-plus-rk3588_defconfig r…...
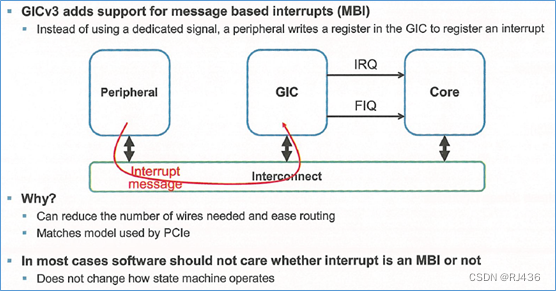
ARM GIC (五)gicv3架构-LPI
在gicv3中,引入了一种新的中断类型。message based interrupts,消息中断。 一、消息中断 外设,不在通过专用中断线,向gic发送中断,而是写gic的寄存器,来发送中断。 这样的一个好处是,可以减少中断线的个数。 为了支持消息中断,gicv3,增加了LPI,来支持消息中断。并且…...
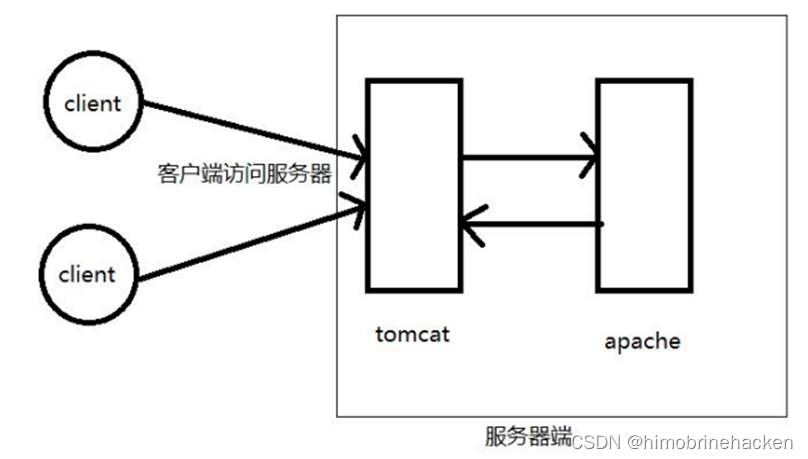
sql-labs服务器结构
双层服务器结构 一个是tomcat的jsp服务器,一个是apache的php服务器,提供服务的是php服务器,只是tomcat向php服务器请求数据,php服务器返回数据给tomcat。 此处的29-32关都是这个结构,不是用docker拉取的镜像要搭建一下…...
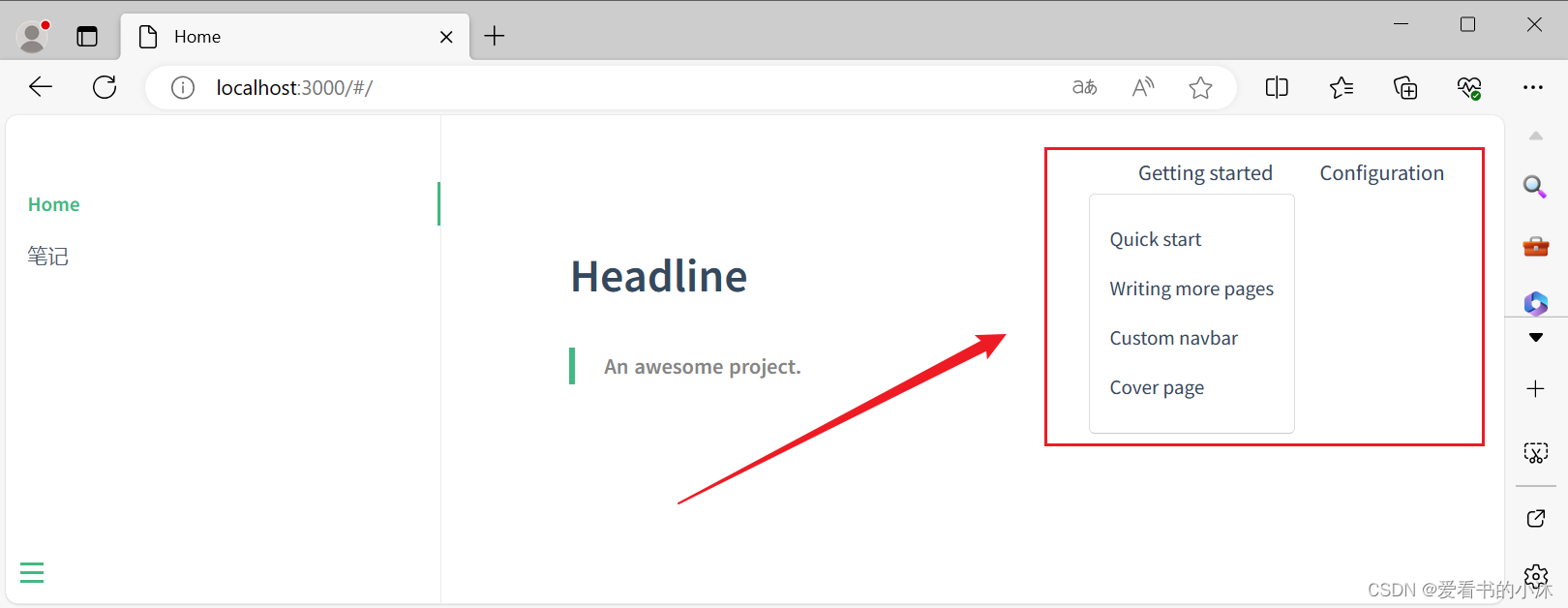
【小沐学写作】Docsify制作在线电子书、技术文档(Docsify + Markdown + node)
文章目录 1、简介2、安装2.1 node2.2 docsify-cli 3、配置3.1 初始化3.2 预览效果3.3 加载对话框3.4 更多页面3.5 侧 栏3.6 自定义导航栏 结语 1、简介 https://docsify.js.org/#/?iddocsify 一个神奇的文档网站生成器。 简单轻巧没有静态构建的 html 文件多个主题 Docsify…...
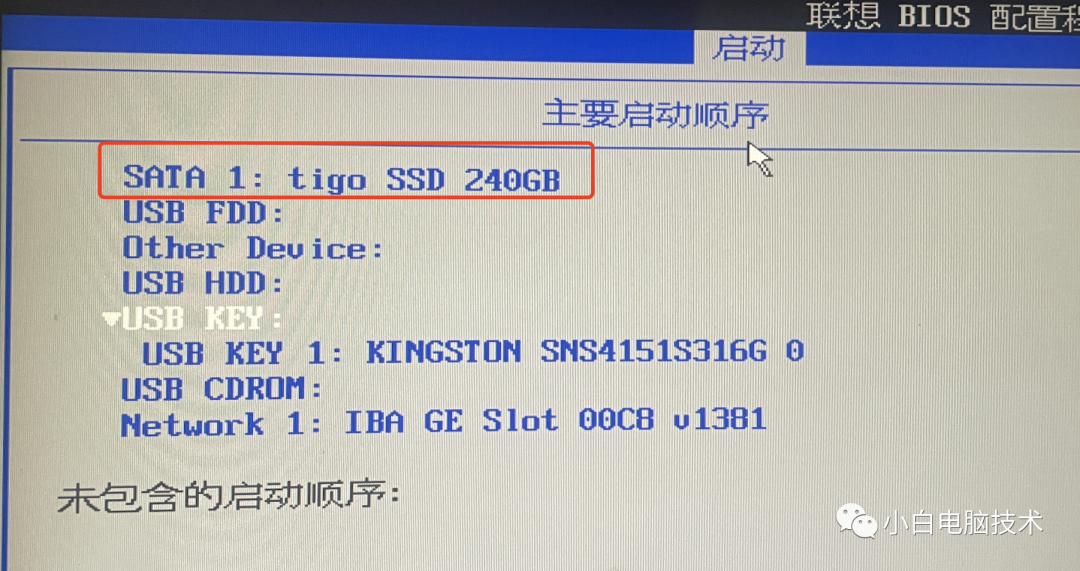
电脑完全重装教程——原版系统镜像安装
注意事项 本教程会清除所有个人文件 请谨慎操作 请谨慎操作 请谨慎操作 前言 本教程是以系统安装U盘为介质进行系统重装操作,照着流程操作会清除整个硬盘里的文件,请考虑清楚哦~ 有些小伙伴可能随便在百度上找个WinPE作为启动盘就直接…...
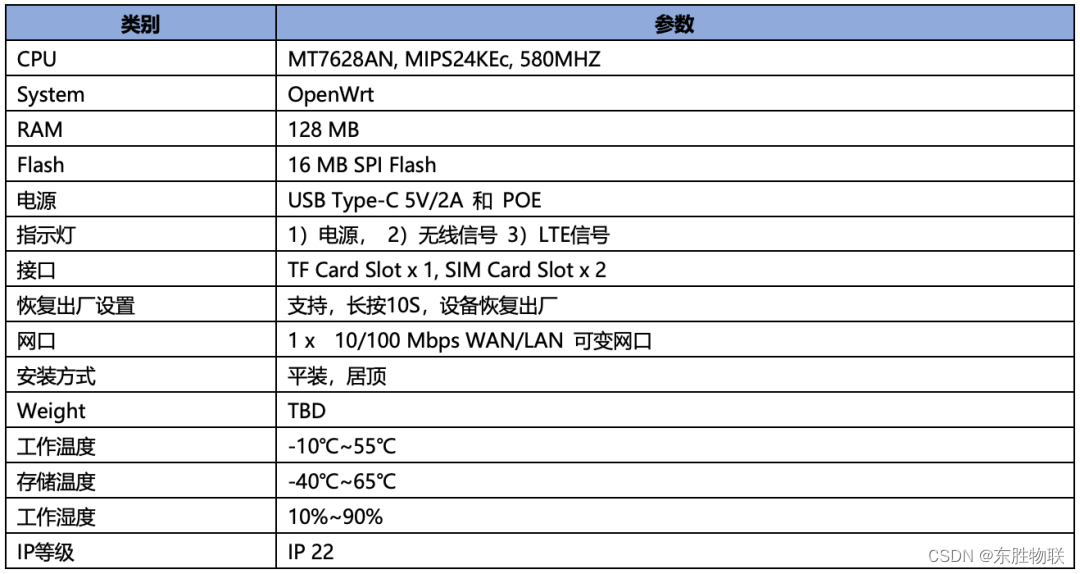
【智慧办公】如何让智能会议室的电子标签实现远程、批量更新信息?东胜物联网硬件网关让解决方案更具竞争力
近年来,为了减少办公耗能、节能环保、降本增效,越来越多的企业开始从传统的办公模式转向智慧办公。 以智能会议室为例,会议是企业业务中不可或缺的一部分,但在传统办公模式下,一来会议前行政人员需要提前准备会议材料…...
静态工厂方法模式)
面向对象设计与分析40讲(16)静态工厂方法模式
前面我们介绍了简单工厂模式,在创建对象前,我们需要先创建工厂,然后再通过工厂去创建产品。 如果将工厂的创建方法static化,那么无需创建工厂即可通过静态方法直接调用的方式创建产品: // 工厂类,定义了静…...
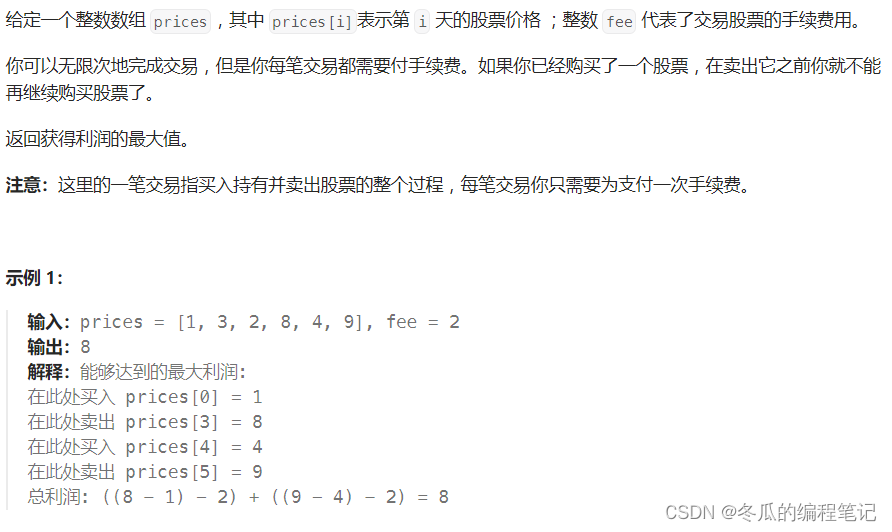
【贪心】买卖股票的最佳时机含手续费
/** 贪心:每次选取更低的价格买入,遇到高于买入的价格就出售(此时不一定是最大收益)。* 使用buy表示买入股票的价格和手续费的和。遍历数组,如果后面的股票价格加上手续费* 小于buy,说明有更低的买入价格更新buy。如…...

Altium Designer入门到就业【目录】
🏡《AD目录》 欢迎大家来到《Altium Designer入门到就业》该专栏包括【电路设计篇】【PCB设计篇】【电路仿真篇】【PCB仿真篇】四个部分,以供大家参考。大家直接点击大纲中蓝色标题即可轻松传送。 【电路设计篇】 Altium Designer(AD24&#…...

cmake 查看编译命令,以及在vscode中如何使用cmke
通过设置如下配置选项,可以生成compile_commands.json 文件,记录使用的编译命令 set(CMAKE_EXPORT_COMPILE_COMMANDS ON)获得现有模块列表 cmake --help-module-list查看命令文档 cmake --help-command find_file查看模块的详细信息 cmake --help-mo…...

玩转 Scrapy 框架 (一):Scrapy 框架介绍及使用入门
目录 一、Scrapy 框架介绍二、Scrapy 入门 一、Scrapy 框架介绍 简介: Scrapy 是一个基于 Python 开发的爬虫框架,可以说它是当前 Python 爬虫生态中最流行的爬虫框架,该框架提供了非常多爬虫的相关组件,架构清晰,可扩…...
node.js mongoose index(索引)
目录 简介 索引类型 单索引 复合索引 文本索引 简介 在 Mongoose 中,索引(Index)是一种用于提高查询性能的数据结构,它可以加速对数据库中文档的检索操作 索引类型 单索引、复合索引、文本索引、多键索引、哈希索引、地理…...
谷歌推大语言模型VideoPoet:文本图片皆可生成视频和音频
Google Research最近发布了一款名为VideoPoet的大型语言模型(LLM),旨在解决当前视频生成领域的挑战。该领域近年来涌现出许多视频生成模型,但在生成连贯的大运动时仍存在瓶颈。现有领先模型要么生成较小的运动,要么在生…...
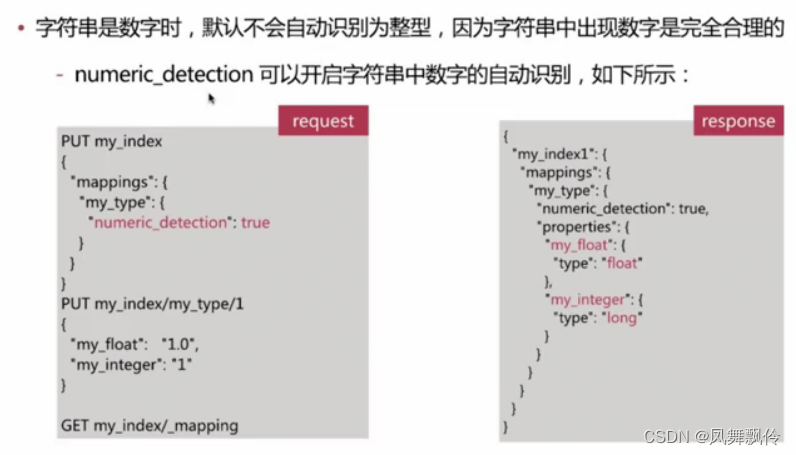
ES-mapping
类似数据库中的表结构定义,主要作用如下 定义Index下的字段名( Field Name) 定义字段的类型,比如数值型、字符串型、布尔型等定义倒排索引相关的配置,比如是否索引、记录 position 等 index_options 用于控制倒排索记录的内容,有如…...

Centos 7.9安装Oracle19c步骤亲测可用有视频
视频介绍了在虚拟机安装centos 7.9并安装数据库软件的全过程 视频链接:https://www.zhihu.com/zvideo/1721267375351996416 下面的文字描述是安装数据库的部分介绍 一.安装环境准备 链接:https://pan.baidu.com/s/1Ogn47UZQ2w7iiHAiVdWDSQ 提取码&am…...
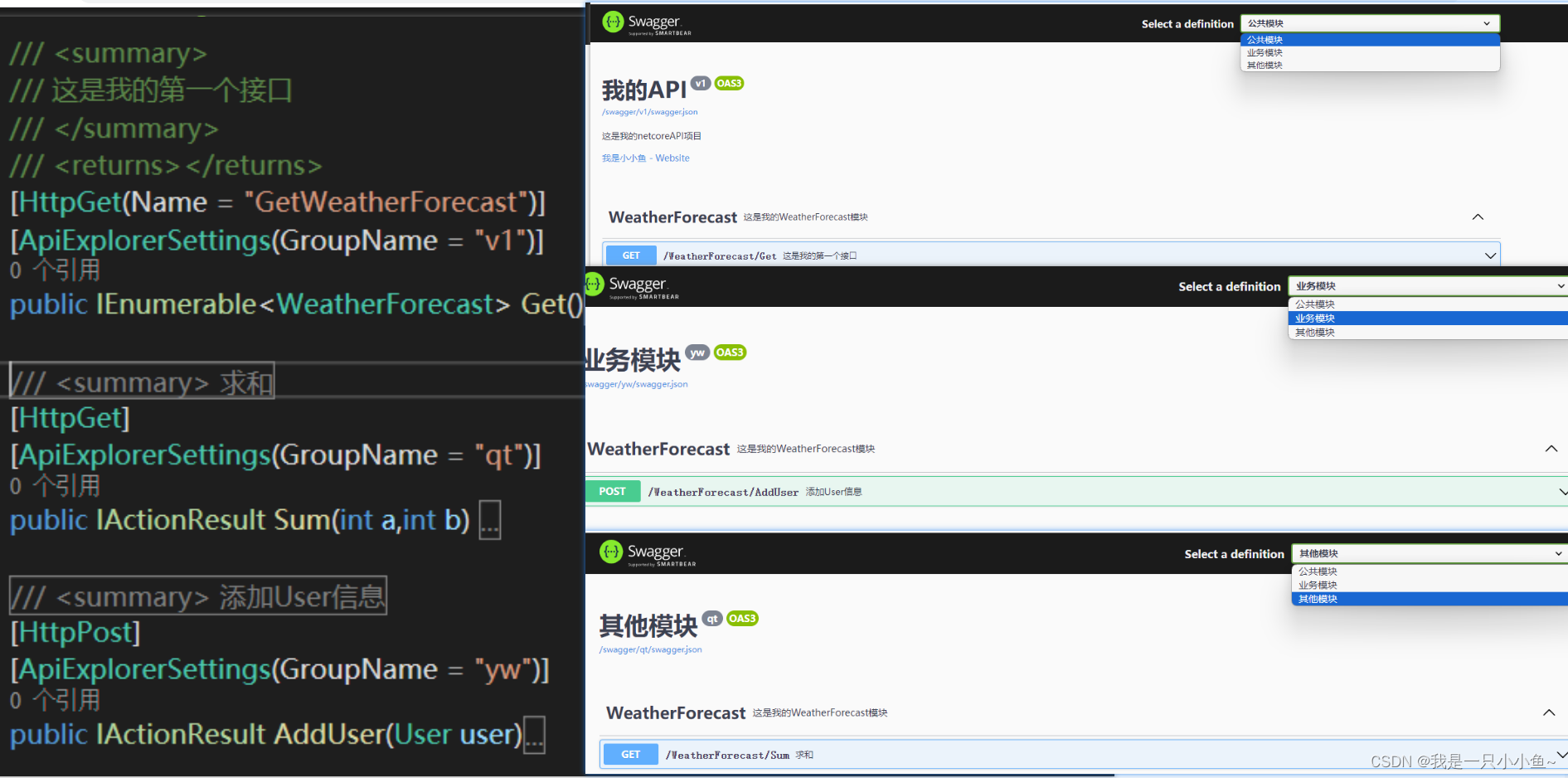
.NET中的Swagger使用
目录 前言 一、Swagger是什么? 二、如何Swagger文档说明的信息 1.在AddSwaggerGen方法中写入文档信息 2.运行效果 二、文档UI界面标题、路由设置 1.在中间件UseSwaggerUI方法中配置 三、文档UI界面添加接口注释 1.在 .csproj中配置 2.在AddSwaggerGen方法中配置Incl…...

结构屈曲分析
结构屈曲分析主要用于判定结构受载后是否有失稳风险,作为工程应用,一般分为线性屈曲分析和非线性屈曲分析。 线性屈曲分析需要具备较多的前提条件,如载荷无偏心、材料无缺陷等,在实际工程应用中结构制作过程和加载方式很难达到线性…...

英雄联盟智能助手Seraphine:告别手动查询,实现高效游戏决策自动化
英雄联盟智能助手Seraphine:告别手动查询,实现高效游戏决策自动化 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 在英雄联盟排位赛中,你是否曾因错过接受对局而懊恼不已&a…...
)
STM8硬件IIC驱动BNO055传感器避坑指南(附完整代码)
STM8硬件IIC驱动BNO055传感器实战解析与优化 BNO055作为一款集成了9轴传感器融合算法的智能芯片,能够直接输出姿态角数据,极大简化了嵌入式系统中姿态解算的复杂度。然而在实际应用中,许多开发者发现使用STM32等常见MCU的模拟IIC接口难以稳定…...

Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案
Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案 【免费下载链接】gopeed A fast, modern download manager for HTTP, BitTorrent, Magnet, and ed2k. Cross-platform, built with Golang and Flutter. 项目地址: https://gitcode.com/GitHub_Tre…...

期权交易基础框架:模块化设计与Python实现指南
1. 项目概述:一个为期权交易者打造的“乐高积木”底座如果你在量化交易或者期权策略开发领域摸爬滚打过一段时间,大概率会遇到一个共同的痛点:策略想法很多,但把它们变成可回测、可实盘、可管理的代码,却要耗费大量的“…...

用Ruby实现RISC-V模拟器:从指令集架构到交互式教学工具
1. 项目概述:一个为Ruby语言量身打造的RISC-V模拟器如果你是一名Ruby开发者,或者对RISC-V这个新兴的指令集架构充满好奇,那么你很可能已经听说过RuriOSS/rurima这个名字。简单来说,这是一个用Ruby语言实现的RISC-V指令集模拟器。但…...

量子最优控制中的iLQR算法实践与优化
1. 量子最优控制基础与挑战量子最优控制(Quantum Optimal Control, QOC)是现代量子计算中的核心技术,其核心目标是通过精心设计的控制脉冲序列,实现对量子系统状态演化的精确操控。在超导量子计算体系中,这一技术尤为重…...

[具身智能-766]:机器人在运动过程中需要实时定位,AMCL 每一次都需要全局撒粒子重搜吗?还是一旦定位后,后续的移动过程中,只需要局部匹配?
直白结论完全不需要每次全局撒粒子重搜定位成功稳定后,机器人全程只做局部小范围匹配,只有丢位置、被挪动时,才会重新全局撒粒子搜索。一、分两种状态1. 正常行走(已定位成功)粒子只聚集在机器人真实位置周边很小一片区…...
)
Cesium动态泛光效果实战:手把手教你用d3kit插件打造炫酷城市光效(附完整代码)
Cesium动态泛光效果实战:手把手教你用d3kit插件打造炫酷城市光效(附完整代码) 当夜幕降临,城市天际线被霓虹灯勾勒出流动的轮廓,这种视觉冲击力正是现代三维可视化项目的灵魂所在。本文将带你用d3kit这个轻量级插件&am…...

用Git和Markdown构建个人知识库:Wandercode项目实践指南
1. 项目概述:从“漫游代码”到个人知识管理系统的蜕变最近在GitHub上看到一个挺有意思的项目,叫“Wandercode”,直译过来就是“漫游代码”。乍一看这个标题,可能会让人联想到某种代码生成器或者自动化脚本工具。但当我深入探究其仓…...

构建高质量代码数据池:从数据堆到模型营养基的进化之路
1. 项目概述:一个为代码生成模型量身定制的数据池最近在折腾大语言模型,特别是代码生成这块,发现一个挺有意思的现象:很多开发者手头有不错的代码数据集,但直接丢给模型训练,效果总是不尽如人意。要么是数据…...