树莓派,mediapipe,Picamera2利用舵机云台追踪人手(PID控制)
一、项目目标
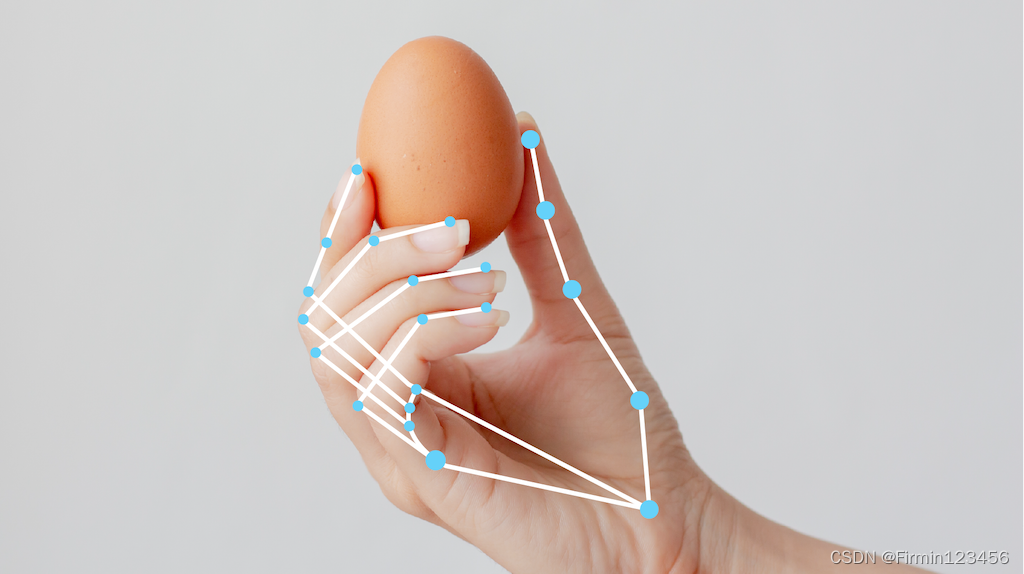
追踪人手大拇指指尖:
当人手移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把大拇指指尖放到视界的中心位置,本文采用了PID控制伺服电机
- Mediapipe Hand简介
MediaPipe 手部标志任务可检测图像中手部的标志。 您可以使用此任务来定位手的关键点并在其上渲染视觉效果。 该任务使用机器学习(ML)模型作为静态数据或连续流对图像数据进行操作,并输出图像坐标中的手部标志、世界坐标中的手部标志以及多个检测到的手的惯用手(左/右手)。
二、 需要准备的软、硬件
- Raspiberry Pi 4b
- 两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)
- 二自由度舵机云台(如下图)
- Raspiberry CSI 摄像头
- mediapipe库, 安装方法可以参照此链接
组装后的效果:

三、具体步骤
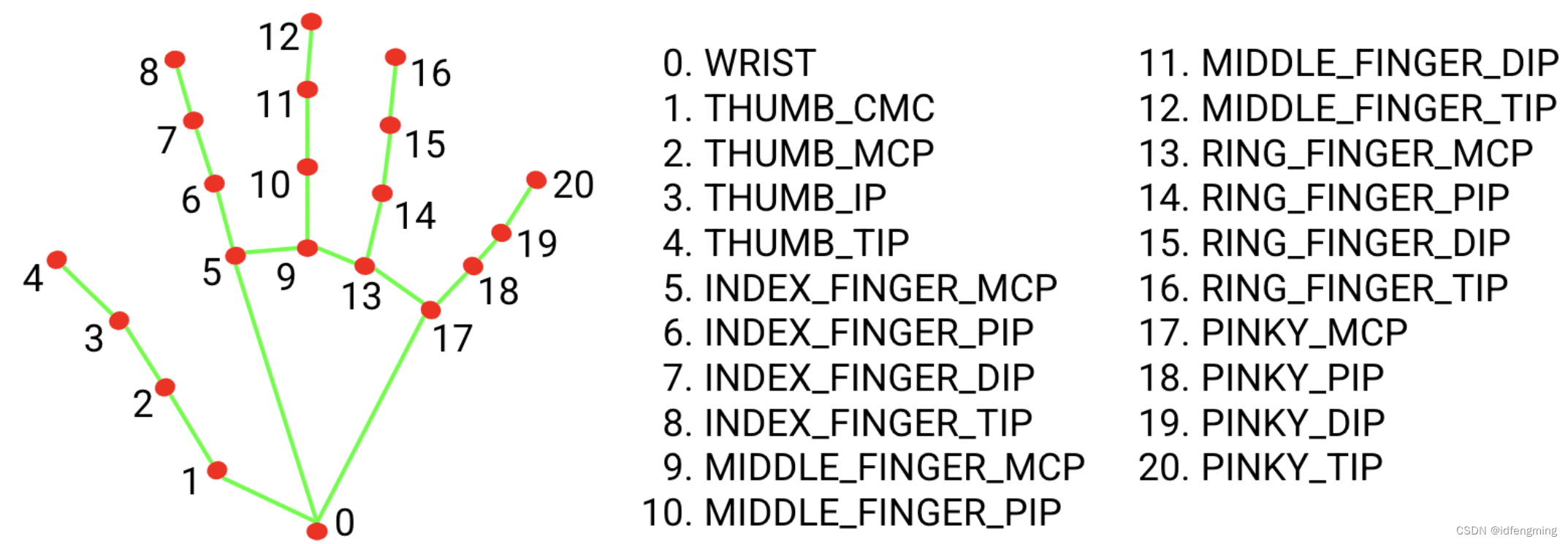
- 创建“hand_tracking_PID.py”文件,代码如下,我在本文中追踪的是大拇指指尖,如果你想追踪其它部位,只须将fingerID参数设置成你想追踪的数字即可。具体数字分布如下图。
#-*- coding: UTF-8 -*-
# 调用必需库
#hand_tracking_PID.py
from multiprocessing import Manager
from multiprocessing import Process
from handobj import HandObj
from pid import PID
from servo import Servo
import signal
import time
import sys
import cv2
import mediapipe as mp
from picamera2 import Picamera2# 定义舵机
pan=Servo(pin=19)
tilt=Servo(pin=16)#定义图像尺寸
dispW=1280
dispH=720# 定义手指ID
fingerID=4# 键盘终止函数
def signal_handler(sig, frame):# 输出状态信息print("[INFO] You pressed `ctrl + c`! Exiting...")# 关闭舵机pan.stop()tilt.stop()# 退出sys.exit()def hand_obj(objX,objY,centerX,centerY):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)# 启动视频流并缓冲print("[INFO] waiting for camera to warm up...")cv2.startWindowThread()picam2 = Picamera2()preview_config = picam2.create_preview_configuration(main={"size": (dispW, dispH),"format":"RGB888"})picam2.configure(preview_config)picam2.start()time.sleep(2.0)#初始化手掌对象探测器hand=HandObj(fingerID)#进入循环while True:# 从视频流抓取图像并旋转frame = picam2.capture_array()frame = cv2.flip(frame, 1)# 找到图像中心(H, W) = frame.shape[:2]centerX.value = W // 2centerY.value = H // 2# 画出图像中心点cv2.circle(frame, (centerX.value, centerY.value), 5, (0, 0, 255), -1)# 找到手指对象点objectLoc = hand.update(frame, (centerX.value, centerY.value))((objX.value, objY.value), handlms) = objectLoc# 画出手指关注的对象点,这是里前面定义的ID:4,即大拇指指尖if handlms is not None: cv2.circle(frame, (objX.value, objY.value), 15, (255, 0, 255), cv2.FILLED)cv2.imshow('Hand', frame)cv2.waitKey(1)def pid_process(output, p, i, d, objCoord, centerCoord):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)# 创建一个PID类的对象并初始化p = PID(p.value, i.value, d.value)p.initialize()# 进入循环while True:# 计算误差error = centerCoord.value - objCoord.value# 更新输出值,当error小于50时,误差设为0,以避免云台不停运行。if abs(error) < 50:error = 0output.value = p.update(error)def set_servos(panAngle, tiltAngle):# ctrl+c退出进程signal.signal(signal.SIGINT, signal_handler)#进入循环while True:# 偏角变号yaw = -1 * panAngle.valuepitch = -1 * tiltAngle.value# 设置舵机角度。pan.set_angle(yaw)tilt.set_angle(pitch)# 启动主程序
if __name__ == "__main__":# 启动多进程变量管理with Manager() as manager: # 相当于manager=Manager(),with as 语句操作上下文管理器(context manager),它能够帮助我们自动分配并且释放资源。# 舵机角度置零pan.set_angle(0)tilt.set_angle(0)# 为图像中心坐标赋初值centerX = manager.Value("i", 0) # "i"即为整型integercenterY = manager.Value("i", 0)# 为人脸中心坐标赋初值objX = manager.Value("i", 0)objY = manager.Value("i", 0)# panAngle和tiltAngle分别是两个舵机的PID控制输出量panAngle = manager.Value("i", 0)tiltAngle = manager.Value("i", 0)# 设置一级舵机的PID参数panP = manager.Value("f", 0.015) # "f"即为浮点型floatpanI = manager.Value("f", 0.01)panD = manager.Value("f", 0.0008)# 设置二级舵机的PID参数tiltP = manager.Value("f", 0.025)tiltI = manager.Value("f", 0.01)tiltD = manager.Value("f", 0.008)# 创建4个独立进程# 1. objectCenter - 探测人脸# 2. panning - 对一级舵机进行PID控制,控制偏航角# 3. tilting - 对二级舵机进行PID控制,控制俯仰角# 4. setServos - 根据PID控制的输出驱动舵机processObjectCenter = Process(target=hand_obj, args=(objX, objY, centerX, centerY))processPanning = Process(target=pid_process, args=(panAngle, panP, panI, panD, objX, centerX))processTilting = Process(target=pid_process, args=(tiltAngle, tiltP, tiltI, tiltD, objY, centerY))processSetServos = Process(target=set_servos, args=(panAngle, tiltAngle))# 开启4个进程processObjectCenter.start()processPanning.start()processTilting.start()processSetServos.start()# 添加4个进程processObjectCenter.join()processPanning.join()processTilting.join()processSetServos.join()- 创建“handobj.py”,代码如下:
#handobj.py
#-*- coding: UTF-8 -*-
# 调用必需库
import mediapipe as mpclass HandObj:def __init__(self,fingerID):# 初始化手掌关键点坐标self.myHands=mp.solutions.hands# 初始化手掌关键点坐标和手掌关键点连接情况self.hands=self.myHands.Hands()# 初始化手掌关键点绘制库self.mpDraw=mp.solutions.drawing_utils# 初始化手掌关键点IDself.fingerID=fingerIDdef update(self, frame, frameCenter):# 处理视频流results = self.hands.process(frame)if results.multi_hand_landmarks:for handLms in results.multi_hand_landmarks:# 绘制手掌关键点self.mpDraw.draw_landmarks(frame, handLms, self.myHands.HAND_CONNECTIONS)for id, lm in enumerate(handLms.landmark):h, w, c = frame.shapecx, cy = int(lm.x * w), int(lm.y * h)if id == self.fingerID:#绘制手掌关键点并返回手掌关键点坐标return ((cx, cy), handLms)return(frameCenter,None)- 创建“pid.py”,代码如下:
#-*- coding: UTF-8 -*-
# 调用必需库
import timeclass PID:def __init__(self, kP=1, kI=0, kD=0):# 初始化参数self.kP = kPself.kI = kIself.kD = kDdef initialize(self):# 初始化当前时间和上一次计算的时间self.currTime = time.time()self.prevTime = self.currTime# 初始化上一次计算的误差self.prevError = 0# 初始化误差的比例值,积分值和微分值self.cP = 0self.cI = 0self.cD = 0def update(self, error, sleep=0.5):# 暂停time.sleep(sleep)# 获取当前时间并计算时间差self.currTime = time.time()deltaTime = self.currTime - self.prevTime# 计算误差的微分deltaError = error - self.prevError# 比例项self.cP = error# 积分项self.cI += error * deltaTime# 微分项self.cD = (deltaError / deltaTime) if deltaTime > 0 else 0# 保存时间和误差为下次更新做准备self.prevTime = self.currTimeself.prevError = error# 返回输出值return sum([self.kP * self.cP,self.kI * self.cI,self.kD * self.cD])
- 上述代码中的from servo import Servo导入servo,这个库是没有的,我们要手动创建这个库,在object_tracking.py所在的目录下新建servo.py文件,复制下面的代码到文件中
#!/usr/bin/env python3
import pigpio
from time import sleep
# Start the pigpiod daemon
import subprocess
result = None
status = 1
for x in range(3):p = subprocess.Popen('sudo pigpiod', shell=True, stdout=subprocess.PIPE, stderr=subprocess.STDOUT)result = p.stdout.read().decode('utf-8')status = p.poll()if status == 0:breaksleep(0.2)
if status != 0:print(status, result)
'''
> Use the DMA PWM of the pigpio library to drive the servo
> Map the servo angle (0 ~ 180 degree) to (-90 ~ 90 degree)'''class Servo():MAX_PW = 1250 # 0.5/20*100MIN_PW = 250 # 2.5/20*100_freq = 50 # 50 Hz, 20msdef __init__(self, pin, min_angle=-90, max_angle=90):self.pi = pigpio.pi()self.pin = pin self.pi.set_PWM_frequency(self.pin, self._freq)self.pi.set_PWM_range(self.pin, 10000) self.angle = 0self.max_angle = max_angleself.min_angle = min_angleself.pi.set_PWM_dutycycle(self.pin, 0)def set_angle(self, angle):if angle > self.max_angle:angle = self.max_angleelif angle < self.min_angle:angle = self.min_angleself.angle = angleduty = self.map(angle, -90, 90, 250, 1250)self.pi.set_PWM_dutycycle(self.pin, duty)def get_angle(self):return self.angledef stop(self):self.pi.set_PWM_dutycycle(self.pin, 0)self.pi.stop()# will be called automatically when the object is deleted# def __del__(self):# passdef map(self, x, in_min, in_max, out_min, out_max):return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_minif __name__ =='__main__':from vilib import Vilib# Vilib.camera_start(vflip=True,hflip=True) # Vilib.display(local=True,web=True)pan = Servo(pin=13, max_angle=90, min_angle=-90)tilt = Servo(pin=12, max_angle=30, min_angle=-90)panAngle = 0tiltAngle = 0pan.set_angle(panAngle)tilt.set_angle(tiltAngle)sleep(1)while True:for angle in range(0, 90, 1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)for angle in range(90, -90, -1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)for angle in range(-90, 0, 1):pan.set_angle(angle)tilt.set_angle(angle)sleep(.01)sleep(.5)- 运行效果如下图,如果不想在运行过程中显示网格与关注的手指节点,可以把相应的代码注释掉

相关文章:
树莓派,mediapipe,Picamera2利用舵机云台追踪人手(PID控制)
一、项目目标 追踪人手大拇指指尖: 当人手移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把大拇指指尖放到视界的中心位置,本文采用了PID控制伺服电机 Mediapipe Hand简介 MediaPipe 手部标志任务可检测图像…...
DQL查询数据(超重点)以及distinct(去重)
DQL(Data Query Language:数据查询语言) 1.所有查询操作都用 SELECT 2.无论是简单的查询还是复杂的查询它都能做 3.数据库中最核心的语言,最重要的语句 4.使用频率最高的语句 语法: SELECT 字段1,字段2,……FROM 表 有时候…...

【网络奇缘】——奈氏准则和香农定理从理论到实践一站式服务|计算机网络
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法 💫个人格言:"没有罗马,那就自己创造罗马~" 目录 失真 - 信号的变化 影响信号失真的因素: 编辑 失真的一种现象:码间…...

MongoDB 根据 _id 获取记录的创建时间并回填记录中
MongoDB 集合 test1,有字段 _id,createTime,createTimeStr,name字段 , 查询createTime不为空的,根据 _id 生成该条记录的创建时间时间戳并填写到字段 createTime 字段中 ,并打印时间戳 // 查询 createTime…...

【开源】基于JAVA语言的独居老人物资配送系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块三、系统展示四、核心代码4.1 查询社区4.2 新增物资4.3 查询物资4.4 查询物资配送4.5 新增物资配送 五、免责说明 一、摘要 1.1 项目介绍 基于JAVAVueSpringBootMySQL的独居老人物资配送系统,包含了社区档案、…...
网络7层架构
网络 7 层架构 什么是OSI七层模型? OSI模型用于定义并理解数据从一台计算机转移到另一台计算机,在最基本的形式中,两台计算机通过网线和连接器相互连接,在网卡的帮助下共享数据,形成一个网络,但是一台计算…...
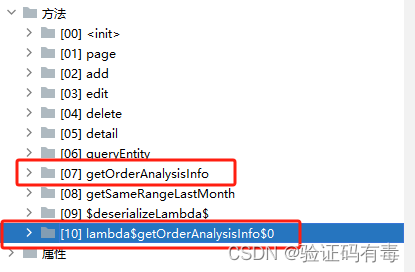
【Arthas】Arthas线上trace匿名函数/Lambda表达式/函数式接口
前言 Arthas是一个非常牛B的东西,我非常喜欢用,特别是在定位线上问题的时候,牛逼大发! 非常建议所有Java玩家都去学习一下 阅读对象 了解并使用过Arthas了解并使用过trace命令 先说结论 先说结论,lambda表达式的追…...

阿里云“块存储”是系统盘和数据盘的意思
阿里云“块存储”是什么意思?块存储是指阿里云服务器的系统盘或数据盘。块存储EBS(Elastic Block Storage)是为云服务器ECS提供的低时延、持久性、高可靠的块级随机存储。块存储支持在可用区内自动复制您的数据,防止意外硬件故障导…...

AI赋能金融创新:ChatGPT引领量化交易新时代
文章目录 一、引言二、ChatGPT与量化交易的融合三、实践应用:ChatGPT在量化交易中的成功案例四、挑战与前景五、结论《AI时代Python量化交易实战:ChatGPT让量化交易插上翅膀》📚→ [当当](http://product.dangdang.com/29658180.html) | [京东…...

数字化时代的探索:学生为何对数据可视化趋之若鹜?
随着信息时代的迅猛发展,数据已经成为我们生活中不可或缺的一部分。而在这个数字化浪潮中,越来越多的学生开始关注数据可视化,这并非偶然。下面,我就从可视化从业者的角度出发,简单聊聊为什么越来越多的学生开始关注数…...

vue2、vue3实现用aws s3协议操作minio进行文件存储和读取
亚马逊s3 API文档 最开始安装了aws-sdk/client-s3,但是不知道为什么一直报错,所以用了aws-sdk 准备工作: 需要已经搭建好minio、创建好桶 1. vue2 安装插件 yarn add aws-sdk s3配置 var AWS require("aws-sdk"); AWS.co…...

宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障?
来源:宏集科技 工业物联网 宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障? 原文链接:https://mp.weixin.qq.com/s/Z2qSdJnPLdOxJuG5qz-JJA 欢迎关注虹科,为您提供最新资讯! 一 应用背景 在造纸工业中&…...

【华为OD题库-110】反转每对括号间的子串-java
题目 给出一个字符串s(仅含有小写英文字母和括号)。 请你按照从括号内到外的顺序,逐层反转每对匹配括号中的字符串,并返回最终的结果。注意,您的结果中不应包含任何括号。 示例1: 输入: s “(abcd)” 输出: “dcba” 示例2: 输入: s “(u(l…...

如何搭建一个高效的Python开发环境
“工欲善其事,必先利其器”,这里我们来搭建一套高效的 Python 开发环境,为后续的数据分析做准备。 关于高效作业,对于需要编写 Python 代码进行数据分析的工作而言,主要涉及两个方面。 1. 一款具备强大的自动完成和错…...

Reactor 和 Proactor模式,IO复用与epoll、同步IO,异步IO与协程
汽车软件中的CPU密集与IO密集任务 在汽车软件中,涉及到ADAS的长期占用CPU的计算任务可以算的上是CPU密集型。 另外的,众多SOA原子服务或者各种数据收集、处理、分发、log系统,应该算是IO密集型任务。 寻求一些手段优化IO性能的原因 在过去…...
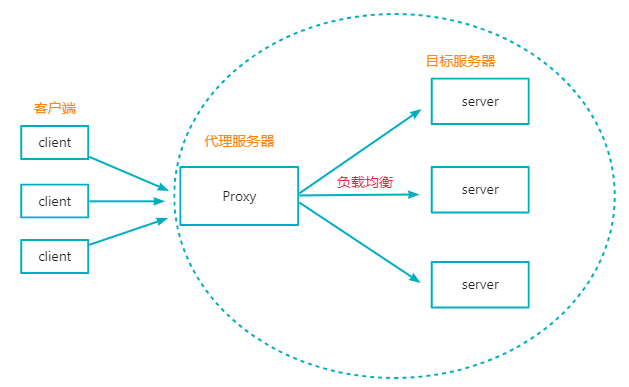
nginx反向代理服务器及负载均衡服务配置
一、正向代理与反向代理 正向代理:是一个位于客户端和原始服务器(oricin server)之间的服务器,为了从原始服务器取得内容,客户端向代理发送一个请求并指定目标(原始服务器),然后代理向原始服务器转交请求并将获得的内容返回给客户…...

【Log4j2】Log4j2最佳实践:Log4j2配置超过7天压缩,超过3个月删除文件的滚动日志,分别定义info文件和error文件,按照每小时存储
目录 Log4j2配置 springboot多环境日志配置 参考资料 Log4j2配置 如果你想要在控制台输出美化的日志信息,你可以使用Log4j2的ConsoleAppender和AnsiColorConverter来实现。下面是相应的配置示例: <Configuration status"WARN"><…...
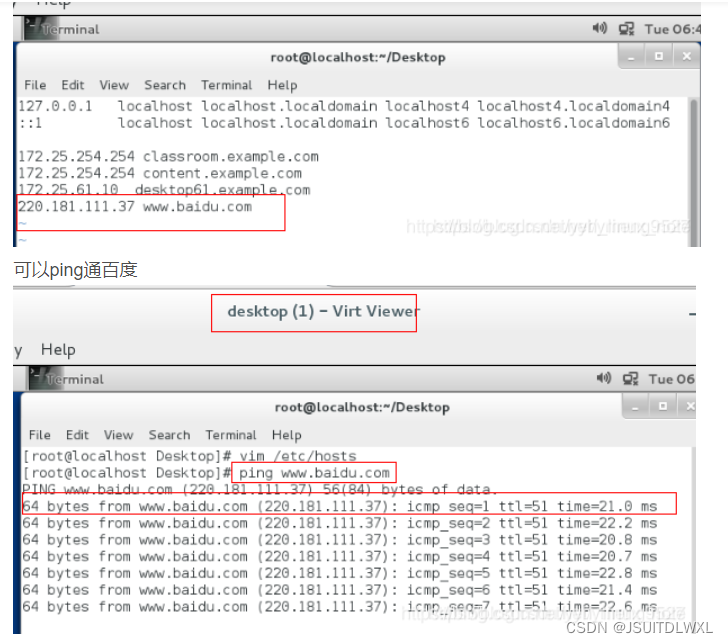
windows和Linux如何做强制域名解析
首先我们了解两个问题: 一、域名解析是什么? 域名解析是让我们可以通过网站的域名来找到它对应的IP地址,以便更加方便的访问我们所需访问的网站的一种服务。 它通过DNS服务器来进行,我们输入所想要访问的域名,将会通过…...
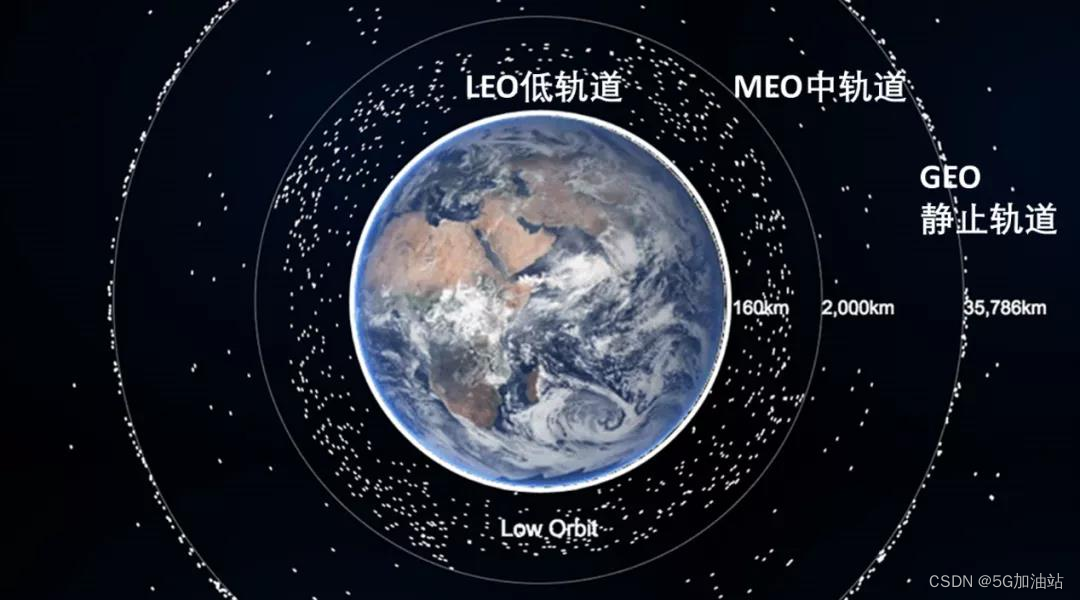
5G NTN:通信新天地,卫星通信的奇妙探索
导言 嗨,大家好!今天我们要深入了解一项让通信更强大的技术——5G NTN。它和卫星通信结合在一起,为我们带来了通信的新时代。在这篇文章中,我们将用白话文揭示5G NTN和卫星通信的关系,探索这个通信世界的奇妙之旅。 5…...
RabbitMQ的基础使用
/*** 使用rabbitMQ* 1.引用amqp场景 RabbitAutoConfiguration就会自动生效* 2.给容器中自动配置了各种api RabbitTemplate AmqpAdmin CachingConnectionFactory RabbitMessagingTemplate* 所有属性都是 spring.rabbitmq开头* 3.通过注解EnableRabbit使用* 4.监听消息 使用Rabbi…...

从零到一:在VMware中部署银河麒麟V10桌面版全流程实战
1. 环境准备:搭建你的虚拟实验室 在开始安装银河麒麟V10之前,我们需要先准备好虚拟化环境。就像装修房子前要准备好工具一样,这个步骤决定了后续安装的顺畅程度。我建议使用VMware Workstation Pro 16.x版本,这个版本对国产操作系…...

【NotebookLM研究问题生成避坑白皮书】:从0到1构建可复现、可评估、可审计的问题生成工作流
更多请点击: https://intelliparadigm.com 第一章:NotebookLM研究问题生成的定义与核心价值 NotebookLM 是 Google 推出的面向研究者与知识工作者的实验性 AI 工具,其“研究问题生成”(Research Question Generation, RQG&#x…...

Cesium 体积云进阶:从Perlin-Worley噪声到动态云区渲染
1. 从一团云到动态云区的技术跃迁 第一次在Cesium里用Perlin噪声做出那团棉花糖般的云时,我兴奋地截了十几张图发朋友圈。但很快发现一个问题——这团云放在城市上空像块棉花,放在山脉间又像团雾气,怎么看都不像自然界的云层。真正的云应该有…...

IMX8QX MEK开发板烧录实战:手把手教你从官方BSP包到定制uuu脚本的全流程
IMX8QX MEK开发板烧录实战:从BSP解析到定制化uuu脚本全指南 拿到一块崭新的IMX8QX MEK开发板时,官方提供的BSP包往往像一座未经探索的金矿——资源丰富但路径复杂。本文将带你深入这座金矿,从文件定位到脚本定制,完成一次完整的烧…...

CefFlashBrowser终极指南:三步实现完美Flash浏览器与SOL存档管理
CefFlashBrowser终极指南:三步实现完美Flash浏览器与SOL存档管理 【免费下载链接】CefFlashBrowser Flash浏览器 / Flash Browser 项目地址: https://gitcode.com/gh_mirrors/ce/CefFlashBrowser 在Adobe正式停止Flash支持后,你是否还在为无法访问…...
 函数的高血压临床数据可视化)
3篇6章5节:基于 stat_slab () 函数的高血压临床数据可视化
在现代医学研究,传统 “均值 标准差”“箱线图” 等统计表达,往往会丢失数据的分布形态、双峰特征、组间重叠等关键信息,无法适配真实世界临床数据的复杂特征。而 R 语言 ggdist 包的 stat_slab() 函数,作为分布可视化体系的核心底层工具,不仅能实现样本数据的完整分布呈…...

ARM NEON SIMD指令集:VMAX与VMIN向量运算详解
1. ARM SIMD指令集基础与向量运算概述在移动计算和嵌入式系统领域,ARM架构凭借其出色的能效比占据了主导地位。随着应用对计算性能需求的不断提升,SIMD(单指令多数据)技术成为提升处理器并行计算能力的关键手段。ARM的Advanced SI…...

【免费下载】 车牌识别字符库
车牌识别字符库 【下载地址】车牌识别字符库 本仓库提供了一个车牌识别字符库,该字符库已经过预处理,将车牌上的字符进行了切割和分割,每个字符均为单独的图像文件。字符图像的大小统一为20x20像素,涵盖了车牌上常见的省份简写、数…...

【免费下载】 Airplayer:苹果设备投屏的终极解决方案
Airplayer:苹果设备投屏的终极解决方案 【下载地址】Airplayer苹果投屏软件 Airplayer是一款专为苹果设备设计的高效投屏软件,它允许用户轻松地将iPhone或iPad屏幕的内容无线传输到电脑上显示。无论是播放视频、展示照片、进行会议演示还是游戏分享&…...

【亲测免费】 高效便捷的AD域管理Web工具:简化您的域管理流程
高效便捷的AD域管理Web工具:简化您的域管理流程 【下载地址】AD域管理Web版工具 本资源提供了一个基于微软官方文档,使用.NET技术开发的Web AD域管理工具。该工具采用简单的HTML和一般处理程序(Generic Handler)来实现,…...