MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
系列文章目录
前言
本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流程。
一、打开项目
要开始使用,请单击文档中的 "打开实时脚本 "或使用 openExample 函数打开示例实时脚本并访问支持文件。
openExample('urseries/GazeboSimulationSemiStructuredIntelligentBinPickingUR5eExample');然后,打开 Simulink™ 项目文件。
prj = openProject('BinPickingUR5eSimulation/BinPickingGazeboSimExampleProject.prj');二、拣选工作流程
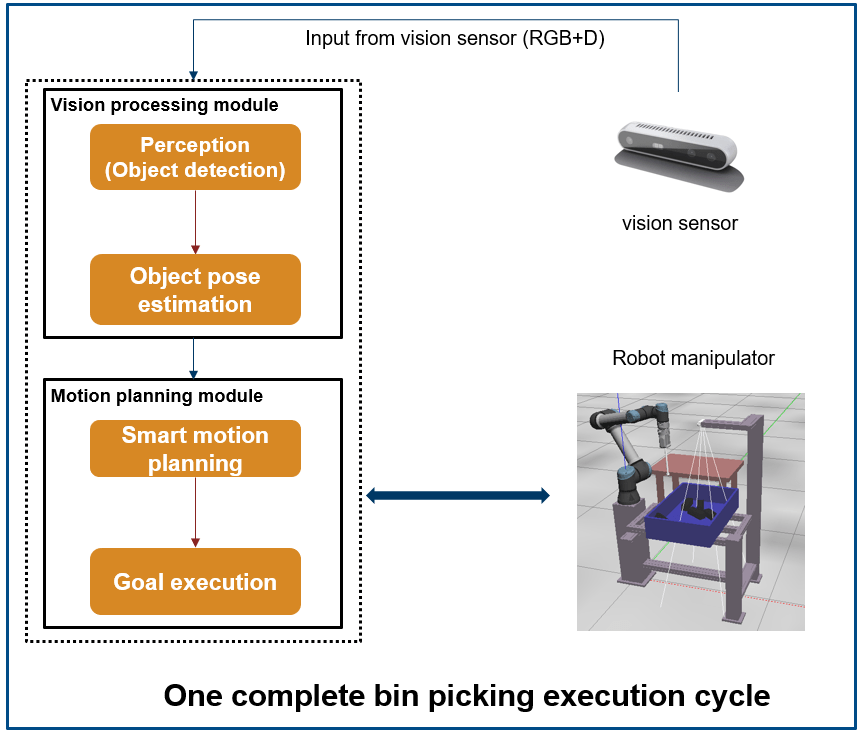
该图显示了模拟 cobot 仓储拣选应用的一个完整执行周期所涉及的操作。
在这个例子中,我们的目标是半结构化分仓,这是一种基于仓复杂性的分类。

从高层次来看,这项任务可分为两个主要模块:
- 视觉处理/感知模块
- 运动/轨迹规划模块
2.1 视觉处理或感知模块
这一工作流程可进一步分为两个方面:
- 使用 RGB 数据进行物体检测,即使用深度学习基于 RGB 和深度(RGBD)数据进行物体分割
- 使用三维点云数据进行物体姿态估算,可用于估算已识别物体的姿态,以便进行运动规划
下图显示了使用 YOLOv4 和基于 PCA 的算法进行物体姿态估计的步骤。

感知过程包括两个主要步骤、
- 训练和验证: 训练基于 RGB 的物体检测网络 (YOLOv4),并根据测试数据集进行验证。
- 在线物体检测: 使用预训练的 YOLOv4 网络和主成分分析 (PCA) 对实时原始 RGBD 数据进行姿态估计。

2.2 运动规划模块
该工作流程可分为两个部分:
- 智能运动规划,从检测到的部件中挑选运动规划逻辑
- 目标执行,使用 UR5e cobot 执行取放操作的轨迹规划
规划器入口点函数是根据使用 manipulatorRRT 算法示例对 UR5e 进行运动规划和刚体树仿真(用于垃圾拣选)中使用的算法设计的。该算法使用 manipulatorRRT 规划方法,并在碰撞环境中拾取和放置轨迹。
使用 C/C++ 代码生成器生成 MEX 函数可帮助您减少计算时间,从而缩短取放周期时间。
有关为基于操纵器RRT 算法的规划器创建 MEX 函数的更多信息,请参阅在感知环境中生成操纵器运动规划代码示例。
此外,请参阅此示例,进一步了解如何生成 MEX 函数以加速 MATLAB 程序的执行。
三、所需软件
本例需要
-
MATLAB
-
Robotics System Toolbox
-
Computer Vision Toolbox
-
Deep Learning Toolbox
-
Image Processing Toolbox
-
ROS Toolbox
-
Optimization Toolbox
-
Statistics and Machine Learning Toolbox
-
MATLAB Coder (Required if you want to use MEX function for motion planner)
-
Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators
-
Computer Vision Toolbox Model for YOLO v4 Object Detection support package (Required if you want to train a detector model)
本示例需要下载虚拟机以使用预配置的 Gazebo 环境。有关详细信息,请参阅以下部分。
四、下载预装 Gazebo 环境的 ROS 虚拟机
您可以下载已安装 ROS 和 Gazebo 的虚拟机镜像。该虚拟机基于 Ubuntu® Linux®,已进行预配置以支持 ROS Toolbox™ 中的示例。
- 从本页 "下载虚拟机 "部分提供的链接下载并安装 ROS 虚拟机。
- 启动虚拟机。
4.1 本模拟示例中使用的插件和 ROS 驱动程序
- 模拟 Universal 机器人 UR5e
- 模拟 Robotiq Epick 抽吸式机械手
- 模拟英特尔® RealSense™ 深度摄像头 D415
4.2 Universal 机器人 UR5e 使用的接口
Universal Robots UR 系列机械手机器人系统工具箱支持包的功能用于对模拟 Universal Robots UR5e 进行轨迹和关节控制。该支持包提供 universalrobot 类,可通过 ROS 接口进行控制。有关其他功能的更多信息,请参阅此文档页面。
4.3 用于 Robotiq Epick 吸爪的接口
为了模拟虚拟吸力机械手,我们使用了 ROS gazebo_plugin 的定制修改真空机械手插件。该插件的修改方式是在末端执行器本体和目标物体之间创建一个虚拟关节,并设定一定的偏移距离,以便吸附物体。在此过程中,它还会消除物体的碰撞,从而避免与垃圾箱或其他部件发生碰撞。
在激活和停用插件时,会使用 activateVacuum 和 deactivateVaccum 函数来调用相应的 ROS 服务。
4.4 用于英特尔® RealSense™ D415 的接口
为实现感知目的,本应用程序开发使用了英特尔® RealSense™ D415 摄像头深度模块。MATLAB 通过 ROS 使用 IntelRealSense ROS 驱动程序建立连接。除了这些 ROS 驱动程序,D415 传感器的 Gazebo 传感器还使用了 realsense_gazebo_plugin 插件。
用于训练 YOLOv4 深度学习网络的数据集就是使用该传感器创建的。
注:所有插件和修改都包含在下载的虚拟机中,并附有所需的许可证文件。
4.5 本示例中使用的模拟物理设置
为演示使用 Universal Robots UR5e 的智能垃圾桶拣选工作流程,本示例使用了一个长方体物体和一个矩形垃圾桶。


长方体和垃圾箱的尺寸在 initializeParametersForBinPickingSimulation.m 脚本中提供。
4.6 刚体树和实际环境设置
在本示例中,我们将为运动规划创建一个刚体树(RigidBodyTree)环境。

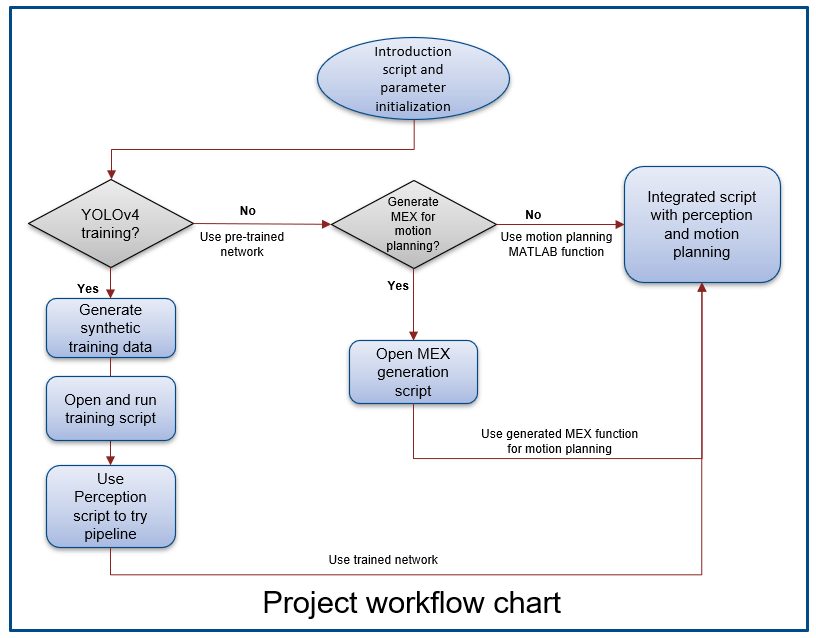
本流程图将引导您了解感知、运动规划和积分器模块的可用脚本。
五、参数初始化
初始化脚本 initializeParametersForBinPickingSimulation.m 会在打开此 MATLAB 项目时自动运行。该脚本定义了感知、运动规划和积分器项目模块中使用的一些重要参数。您可以在 Initialize 文件夹中找到该脚本,也可以运行下面的命令打开该脚本。如果使用不同的设置,请相应更改参数。
open("initializeParametersForBinPickingSimulation.m");
六、打开合成数据生成模块脚本
运行此命令打开脚本,以便使用 Gazebo 仿真环境生成合成数据。
open("DatasetGenerationUsingGazeboExample.mlx");
七、打开感知模块脚本
运行此命令可打开感知工作流程脚本。该脚本涵盖从训练到物体姿态估计工作流的整个感知流程。
open("DetectionAndPoseEstimationforCuboidSim.mlx");
八、打开运动规划模块脚本
运行此命令可打开运动规划工作流程的脚本。该脚本包括运动规划模块的 RigidBodyTree 仿真工作流程和 MEX 函数生成步骤。
open("BinPickingMotionPlanningMEXGenerationSim.mlx");
九、打开积分器脚本
运行此命令可打开积分器工作流程的主脚本。该脚本展示了如何使用感知和运动规划模块,利用仿真 Universal Robots UR5e 创建完整的垃圾拣选应用工作流程。
open("UR5eSimulationBinPickingApplicationIntegratedScript.mlx");
相关文章:
MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
系列文章目录 前言 本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流…...

个性化定制的知识付费小程序,为用户提供个性化的知识服务,知识付费saas租户平台
明理信息科技知识付费saas租户平台 在当今数字化时代,知识付费已经成为一种趋势,越来越多的人愿意为有价值的知识付费。然而,公共知识付费平台虽然内容丰富,但难以满足个人或企业个性化的需求和品牌打造。同时,开发和…...

基于flask和echarts的新冠疫情实时监控系统源码+数据库,后端基于python的flask框架,前端主要是echarts
介绍 基于flask和echarts的新冠疫情实时监控系统 软件架构 后端基于python的flask框架,前端主要是echarts 安装教程 下载到本地,在python相应环境下运行app.py,flask项目部署请自行完成 使用说明 flaskProject文件夹中 app.py是flask项目主运行文…...
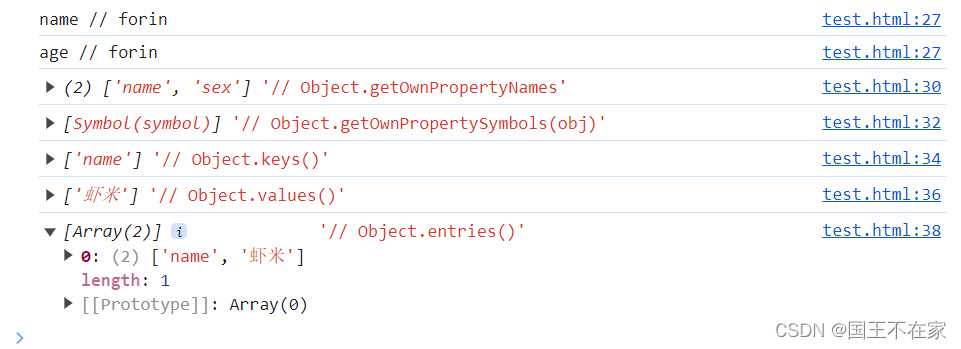
总结js中遍历对象属性的方法
方法介绍 1、 forin循环:遍历对象自身的和原型链上的可枚举属性。 2、Object.getOwnPropertySymbols()方法:返回一个数组,包含对象自身的所有Symbol类型的属性。 3、 Object.getOwnPropertyNames()方法:返回一个数组࿰…...
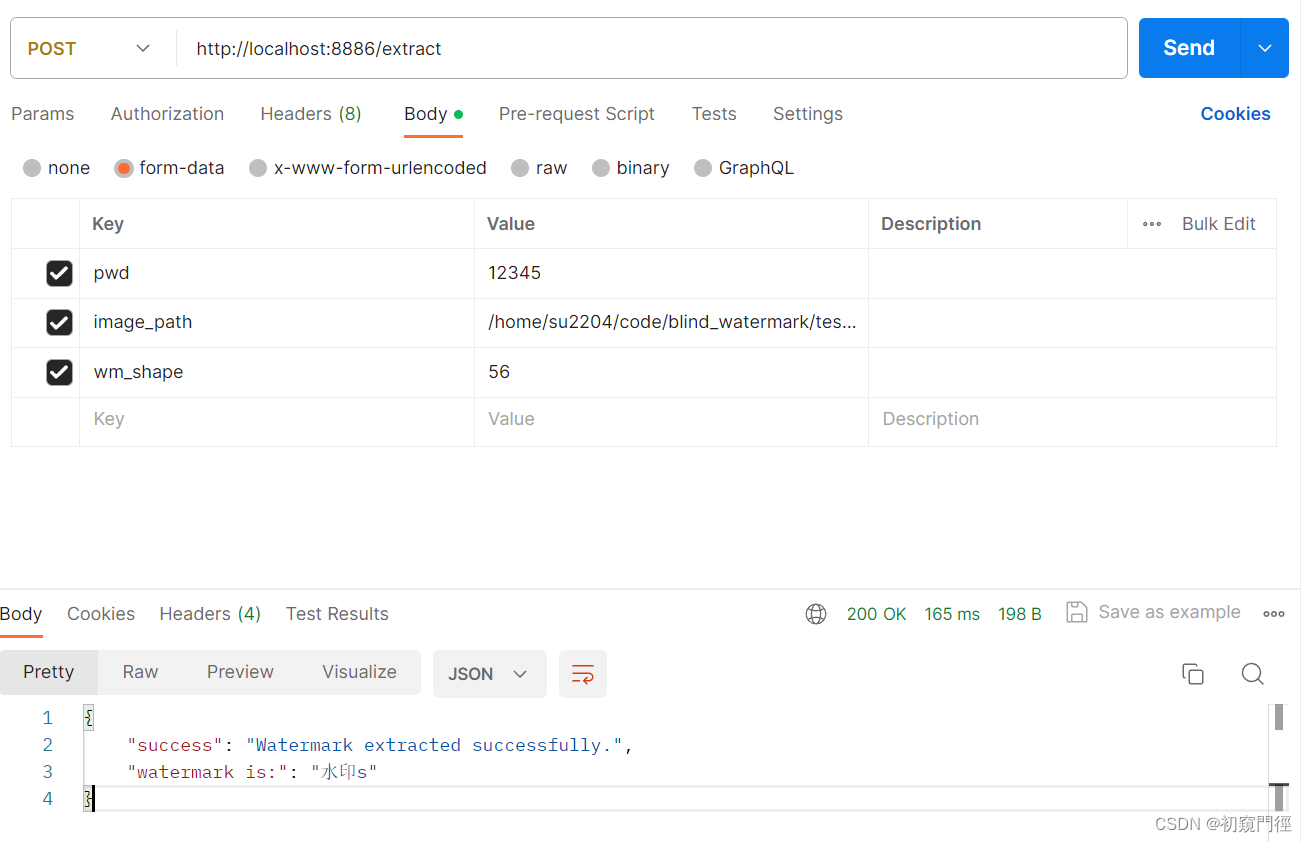
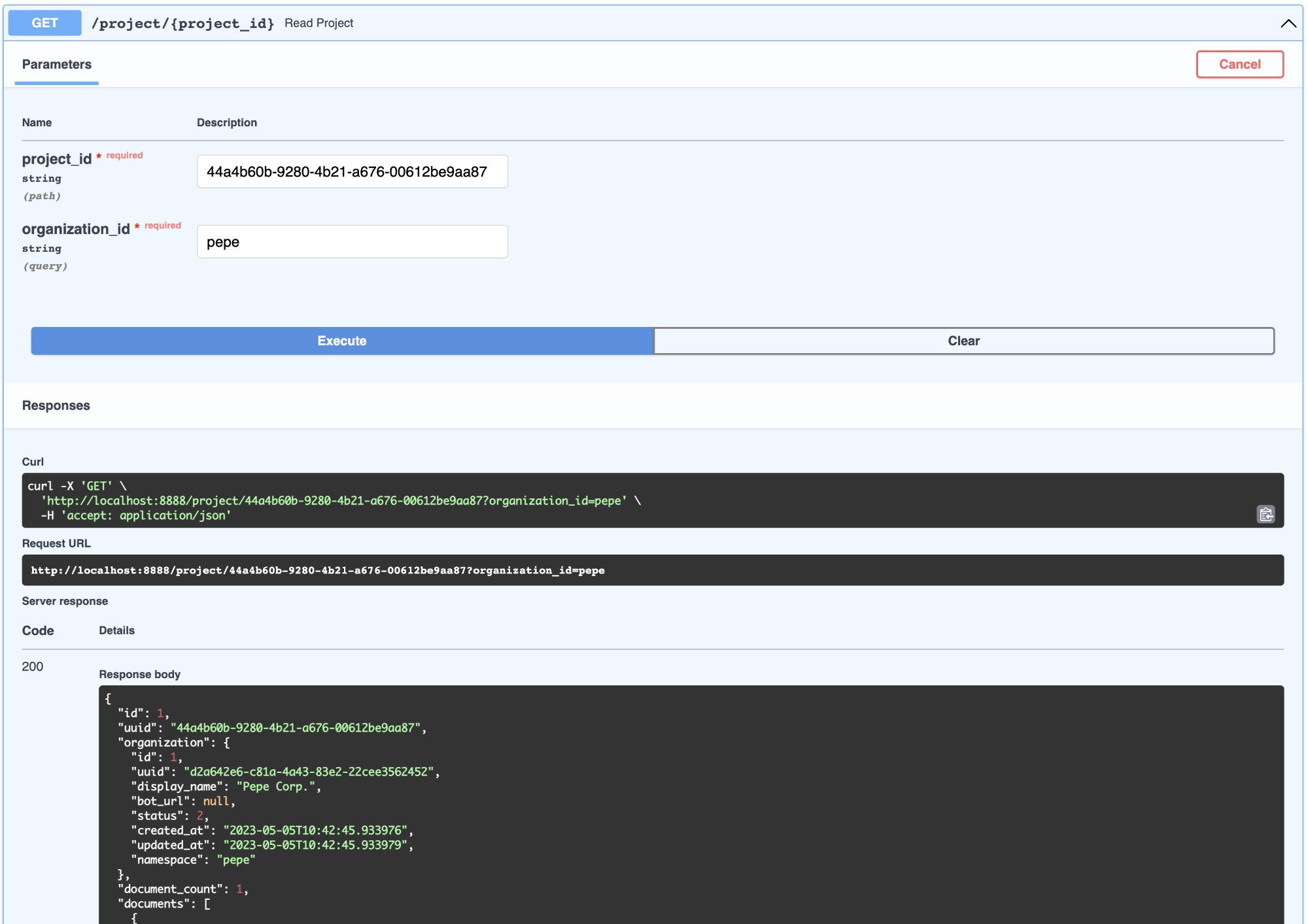
编写fastapi接口服务
FastAPI是一个基于 Python 的后端框架,该框架鼓励使用 Pydantic 和 OpenAPI (以前称为 Swagger) 进行文档编制,使用 Docker 进行快速开发和部署以及基于 Starlette 框架进行的简单测试。 step1:安装必要库 pip install fastapi uvicorn st…...
RasaGPT对话系统的工作原理
RasaGPT 结合了 Rasa 和 Langchain 这 2 个开源项目,当超出 Rasa 现有意图(out_of_scope)的时候,就会执行 ActionGPTFallback,本质上就是利用 Langchain 做了一个 RAG,调用 LLM API。RasaGPT 涉及的技术栈比较多而复杂,…...
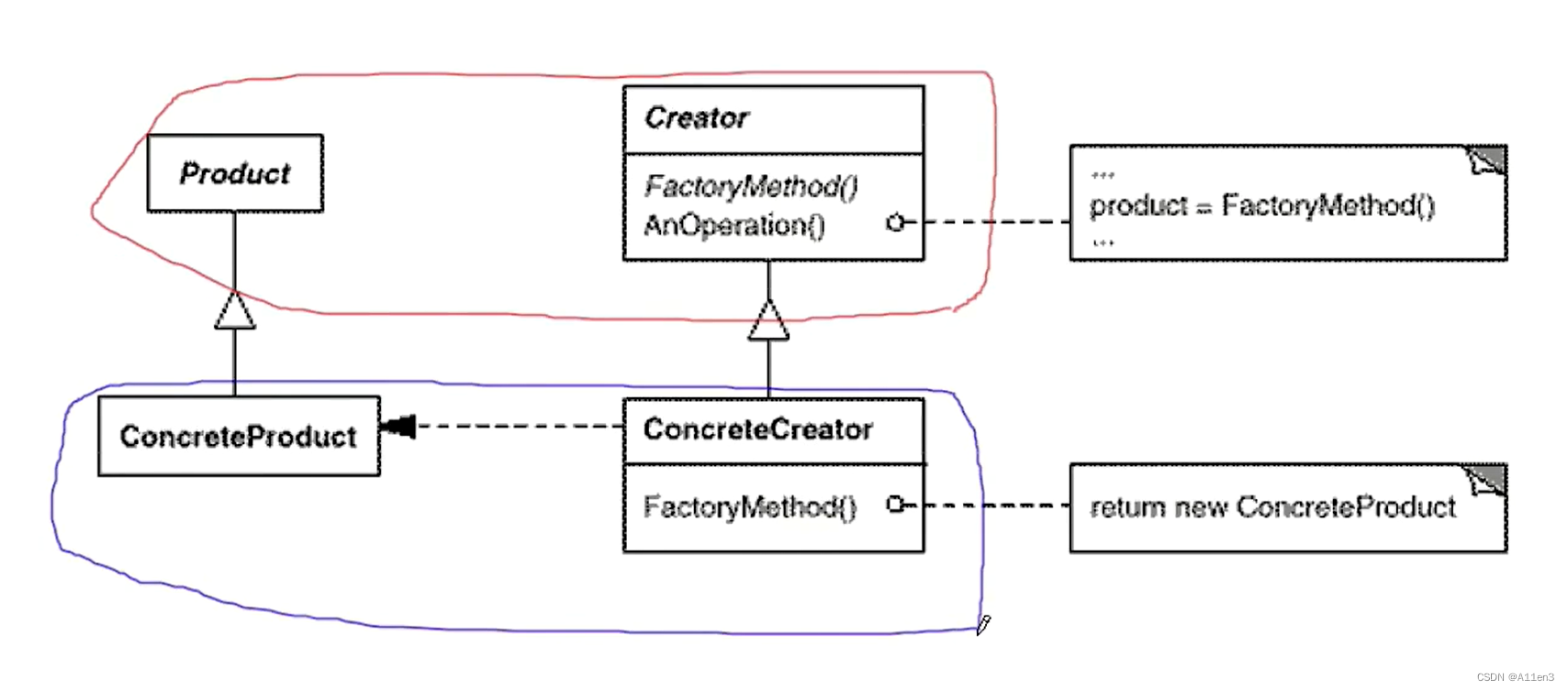
C++设计模式 #7 工厂方法(Factory Method)
“对象创建”模式 通过“对象创建”模式绕开new,来避免对象创建(new)过程中所导致的紧耦合(依赖具体类),从而支持创建的稳定。它是接口抽象之后的第一步工作。 动机 在软件系统中,经常面临着创…...

信息网络协议基础-接入网技术
文章目录 概述***基于ATM架构虚电路PVC和SVC信元格式为什么信元格式由AAL决定?网络架构传统电信网络:点对点链路PPP协议协议内容消息过程多协议封装功能电话网接入Internet(DSL 数字用户线路)主要接入技术ADSL关键技术DMTDSLAM体系结构PPPOE帧格式过程特点局域网定义参考模型L…...

springboot 自动装配原理
在理解springboot自动装配之前需要了解spring的Configuration原理和Conditional两个注解原理。可以看下以前写的这两篇文章 spring 源码阅读之Configuration解析 spring使用Conditional进行条件装配 spring的SPI机制之使用SpringFactoriesLoader加载服务实现 SpringBootApp…...

前端---表格标签
1. 表格的结构 表格是由行和列组成,好比一个excel文件 2. 表格标签 <table>标签:表示一个表格 <tr>标签:表示表格中的一行 <td>标签:表示表格中的列<th>标签:表示表格中的表头 示例代码: &l…...

【软件工程】可执行文件和数据分离
一、概述 可执行文件和数据分离是一种软件设计策略,旨在将程序代码和程序使用的数据分离存储。这种方法通常用于提高软件的模块化程度和灵活性,以及方便软件的管理和维护。 在可执行文件和数据分离中,程序代码通常以可执行文件的形式存储&a…...

Linux dirs命令
Linux dirs命令用于显示目录记录。 显示目录堆叠中的记录。 语法 dirs [/-n -l]参数: n 显示从左边算起第n笔的目录。-n 显示从右边算起第n笔的目录。-l 显示目录完整的记录。 实例 列出"/home/cc/Ruijie"里所有内容的详细信息。可用如下命令。 dir…...

有什么好用的C/C++源代码混淆工具?
有什么好用的C/C源代码混淆工具? 开始使用ipaguard 前言 iOS加固保护是直接针对ios ipa二进制文件的保护技术,可以对iOS APP中的可执行文件进行深度混淆、加密。使用任何工具都无法逆向、破解还原源文件。对APP进行完整性保护,防止应用…...
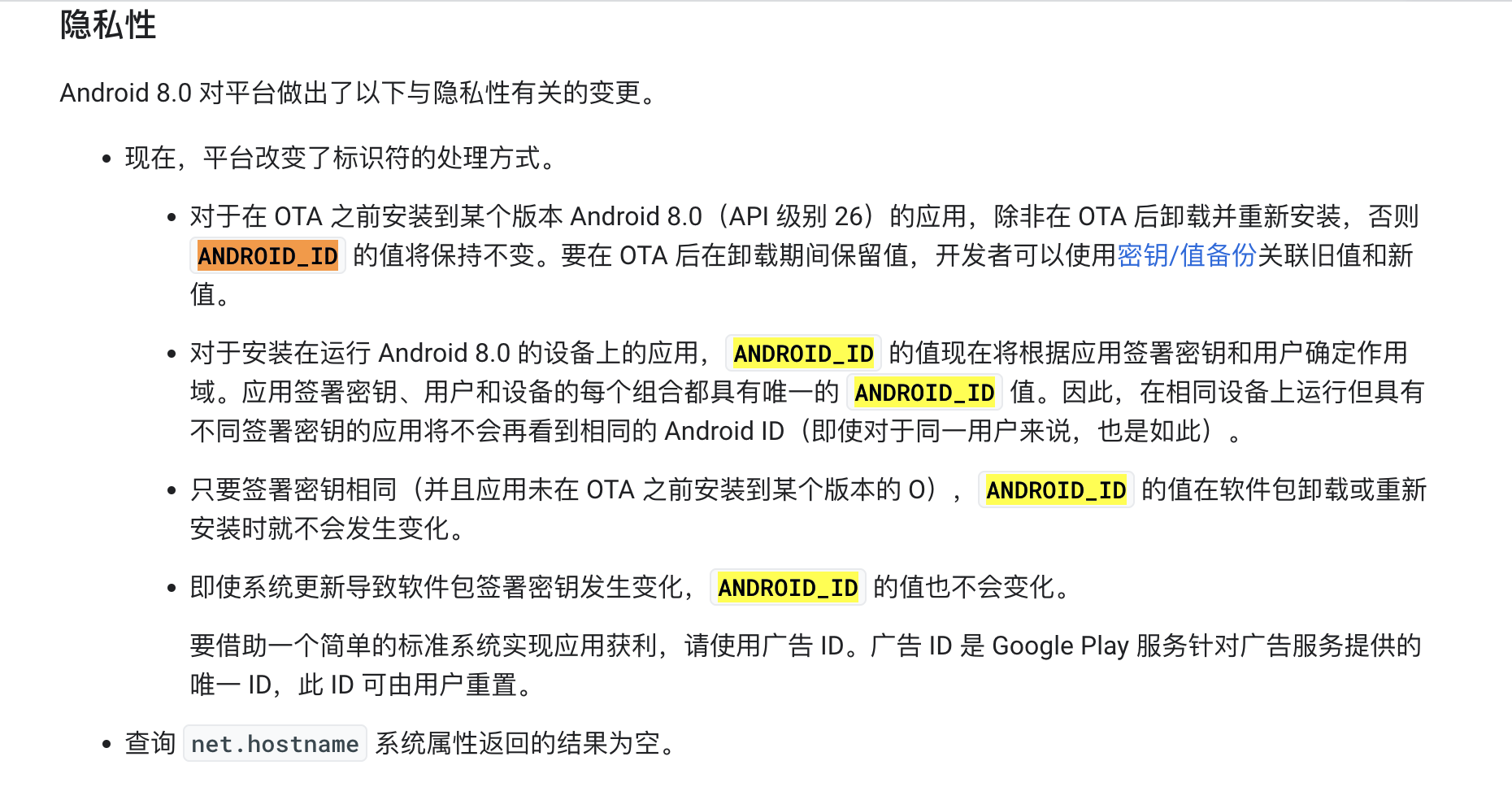
iOS设备信息详解
文章目录 ID 体系iOS设备信息详解IDFA介绍特点IDFA新政前世今生获取方式 IDFV介绍获取方式 UUID介绍特点获取方式 UDID介绍获取方式 OpenUDID介绍 Bundle ID介绍分类其他 IP地址介绍获取方式 MAC地址介绍获取方式正常获取MAC地址获取对应Wi-Fi的MAC地址 系统版本获取方式 设备型…...

如何使用支付宝沙箱环境支付并公网调用sdk创建支付单服务
文章目录 1.测试环境2.本地配置2. 内网穿透2.1 下载安装cpolar内网穿透2.2 创建隧道3. 测试公网访问4. 配置固定二级子域名4.1 保留一个二级子域名4.2 配置二级子域名5. 使用固定二级子域名进行访问 1.测试环境 MavenSpring bootJdk 1.8 2.本地配置 获取支付宝支付Java SDK,…...

[EFI]Dell Latitude-7400电脑 Hackintosh 黑苹果efi引导文件
硬件型号驱动情况主板 Dell Latitude-7400 处理器Intel Core i7-8665U已驱动内存16GB DDR4 RAM已驱动硬盘Toshiba KIOXIA 512GB SSD已驱动显卡Intel UHD 620 Graphics已驱动声卡Realtek ALC256已驱动有线网卡 无 无无线网卡蓝牙Intel Wireless-AC 9560已驱动 支持系统版本 maco…...

用芯片SIC8833可开发电子秤方案
SIC8833作为一款高性能的电子秤方案芯片,这款芯片是一个带24bitADC的8位RISC MCU,内置8k16位OTP程序存储器。具体24位双向I/O口的特性,广泛应用于电子衡器和精密测量及控制系统,能满足用户的不同需求和应用场景。 以下是电子秤方案…...

【Qt-QFile-QDir】
Qt编程指南 ■ Stream■ QTextStream■ QDataStream ■ QDial■ QDir■ QFile■■ ■ Stream ■ QTextStream /* 获取文件的路径 */ QString fileName QFileDialog::getOpenFileName(this);/* 指向文件 */ file.setFileName(fileName);/* 判断文件是否存在 */ if (!file.exi…...

设计模式之-单列设计模式,5种单例设计模式使用场景以及它们的优缺点
系列文章目录 设计模式之-6大设计原则简单易懂的理解以及它们的适用场景和代码示列 设计模式之-单列设计模式,5种单例设计模式使用场景以及它们的优缺点 设计模式之-3种常见的工厂模式简单工厂模式、工厂方法模式和抽象工厂模式,每一种模式的概念、使用…...
- OMXNodeInstance(二))
Android 13 - Media框架(25)- OMXNodeInstance(二)
上一节我们了解了 OMXNodeInstance 的创建过程,以及 IOmx 服务和 OMXNodeInstance、OMX组件之间的联系。接下来我们将一起了解 ACodec 是如何通过 OMXNodeInstance 这个中间层进行端口定义设置,以及端口Buffer分配的。 OMXNodeInstance 的代码还是比较长…...

东南大学论文模板终极指南:3步搞定毕业设计排版难题
东南大学论文模板终极指南:3步搞定毕业设计排版难题 【免费下载链接】SEUThesis 东南大学论文模板 项目地址: https://gitcode.com/gh_mirrors/seu/SEUThesis 对于每一位东南大学的学子来说,毕业季最头疼的往往不是论文内容本身,而是繁…...

如何快速实现微信小游戏开发:weapp-adapter的完整实践指南
如何快速实现微信小游戏开发:weapp-adapter的完整实践指南 【免费下载链接】weapp-adapter weapp-adapter of Wechat Tiny Game in ES6 项目地址: https://gitcode.com/gh_mirrors/we/weapp-adapter 对于熟悉Web前端开发的程序员来说,微信小游戏开…...

CANN/pypto Tensor索引功能
pypto.Tensor索引功能说明 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto Tensor索引是Tensor的核心操作之一,用于从Tensor中筛选、…...

深耕 Harness 工程,解锁 AI Agent 开发之路
2026三掌柜赠书活动第三十一期 Harness工程:从上下文管理到Agent系统构建 目录 前言 详解Harness工程核心价值与独特优势 关于《Harness工程:从上下文管理到Agent系统构建》 编辑推荐 内容简介 作者简介 图书目录 《Harness工程:从上…...

MoE大模型核心揭秘:Router路由机制与活跃参数原理
1. 这不是“参数越多越强”的简单故事:拆解大模型里那个被悄悄藏起来的“开关”你肯定见过这类标题:“GPT-4参数量达1.8万亿!”、“DeepSeek-R1狂堆6710亿参数!”——光看数字,像在比谁家粮仓更大。但真正干过模型部署…...

企业数字化破局:AI低代码为何是唯一刚需?
聊企业数字化转型,现在最绕不开的就是AI低代码。但很多技术人仍有偏见:“低代码低技术”“AI能写代码,没必要用低代码”“中小企业用不起,大企业用不上”。真相很扎心:信通院2026年数据显示,AI低代码化率已…...

华硕笔记本终极性能优化指南:GHelper如何一键释放你的设备潜能?
华硕笔记本终极性能优化指南:GHelper如何一键释放你的设备潜能? 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, V…...

告别臃肿!G-Helper:华硕笔记本用户的终极轻量级控制神器
告别臃肿!G-Helper:华硕笔记本用户的终极轻量级控制神器 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook…...

UE5 BaseHardware.ini硬件兼容性判决机制深度解析
1. 这不是配置文件,而是UE5硬件适配的“宪法性文档”很多人第一次在Unreal Engine 5项目里翻到BaseHardware.ini,下意识就把它当成普通ini配置——改几个数值、调个开关、重启编辑器完事。我刚接手一个跨平台渲染优化项目时也这么干过:把bUse…...

Chrome无痕模式下Selenium BiDi协议断连原因与解决方案
1. 这个问题不是“能不能用”,而是“为什么一开无痕就断连”我第一次在CI流水线里跑通Chrome DevTools Protocol(CDP)自动化时,兴奋地加了--incognito参数想让测试更干净——结果WebDriver直接抛出org.openqa.selenium.devtools.D…...