0开始配置Cartographer建图和导航定位
0开始配置Cartographer
日期:12-19
硬件:激光雷达+IMU
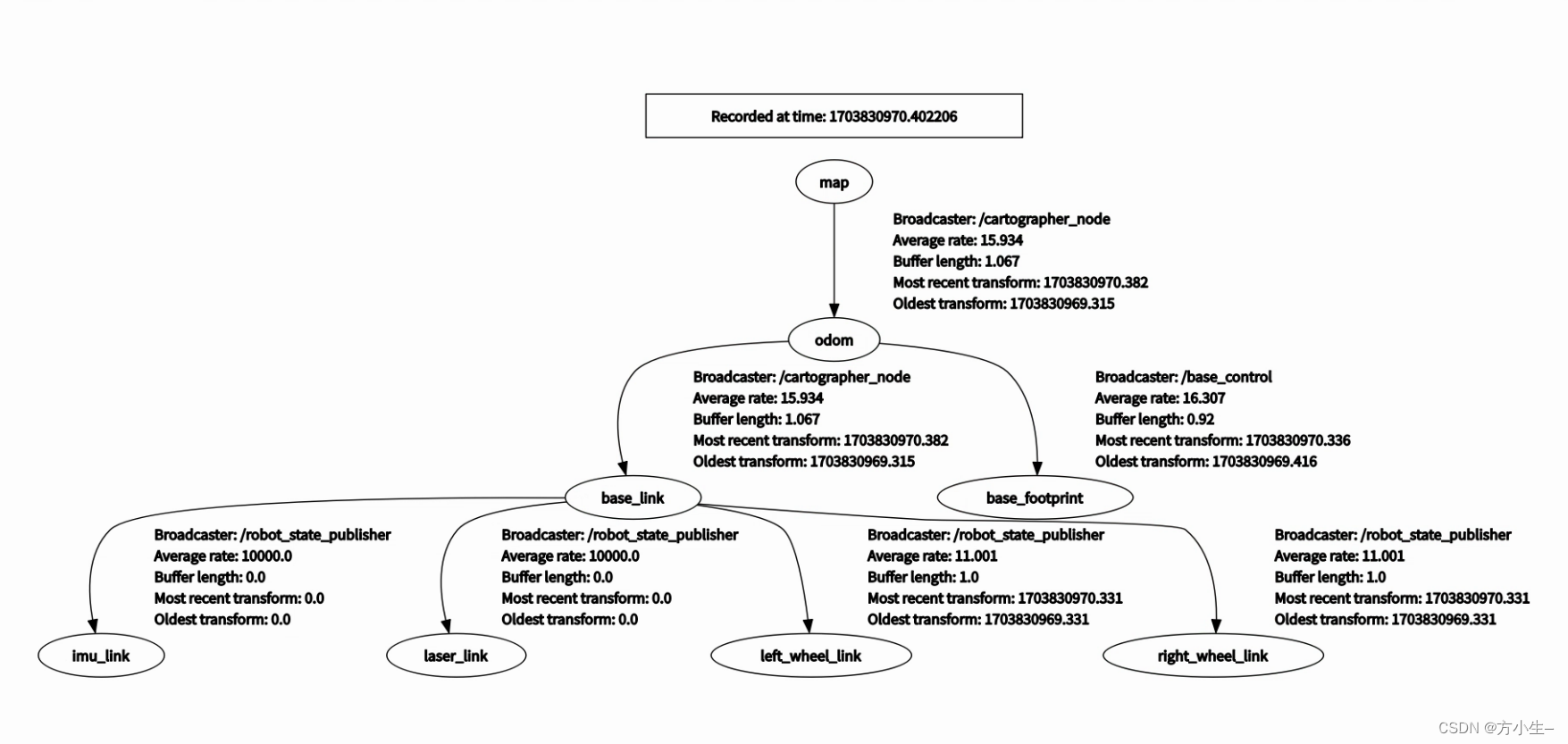
小车的tf变换:
建图配置
lua文件配置:my_robot.lua
include "map_builder.lua"
include "trajectory_builder.lua"options = {map_builder = MAP_BUILDER,trajectory_builder = TRAJECTORY_BUILDER,map_frame = "map",tracking_frame = "imu_link",published_frame = "base_link",odom_frame = "odom",provide_odom_frame = true,publish_frame_projected_to_2d = true,use_pose_extrapolator = false,use_odometry = false,use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 10,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,
}MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 10return optionslaunch配置:my_robot_map.launch
<launch><!-- <param name="robot_description"textfile="$(find cartographer_ros)/urdf/my_robot_2d.urdf" /><node name="robot_state_publisher" pkg="robot_state_publisher"type="robot_state_publisher" /> --><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename my_robot.lua"output="screen"><remap from="scan" to="scan" /><remap from="imu" to="imu" /><!-- <remap from="odom" to="odom" /> --></node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" /><node name="rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>源码修改
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
建图需要取消注释
// 注释不发送地图// occupancy_grid_publisher_.publish(*msg_ptr);
重新编译
catkin_make_isolated --install --use-ninja
source环境
catkin_make_isolated --install --use-ninja
运行并建图
启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动建图:
roslaunch cartographer_ros my_robot_map.launch
启动键盘控制:
roslaunch castlex_keyboard_control keyboard_control.launch
停止接收地图数据:
rosservice call /finish_trajectory 0
保存地图:
rosservice call /write_state "{filename: '/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream'}"
将地图转成png:
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/hgrobot/ws/src/castlex_navigation/maps/map -pbstream_filename=/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream -resolution=0.05
导航配置
源码修改:
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
导航需要注释
// 注释不发送地图// occupancy_grid_publisher_.publish(*msg_ptr);
launch配置:my_robot_2d_localization.launch
<launch><arg name="load_state_filename" default="/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream"/><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename my_robot_location.lua-load_state_filename $(arg load_state_filename)"output="screen"><remap from="scan" to="scan" /><remap from="imu" to="imu" /></node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05 " /> <!-- 增加是否纯定位模式参数pure_localization --></launch>lua文件配置:
include "my_robot.lua"TRAJECTORY_BUILDER.pure_localization_trimmer = {max_submaps_to_keep = 3,}POSE_GRAPH.optimize_every_n_nodes =100return options启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动定位:
注意小车启动位置要和开始位置一样
roslaunch cartographer_ros my_robot_2d_localization.launch
启动导航:
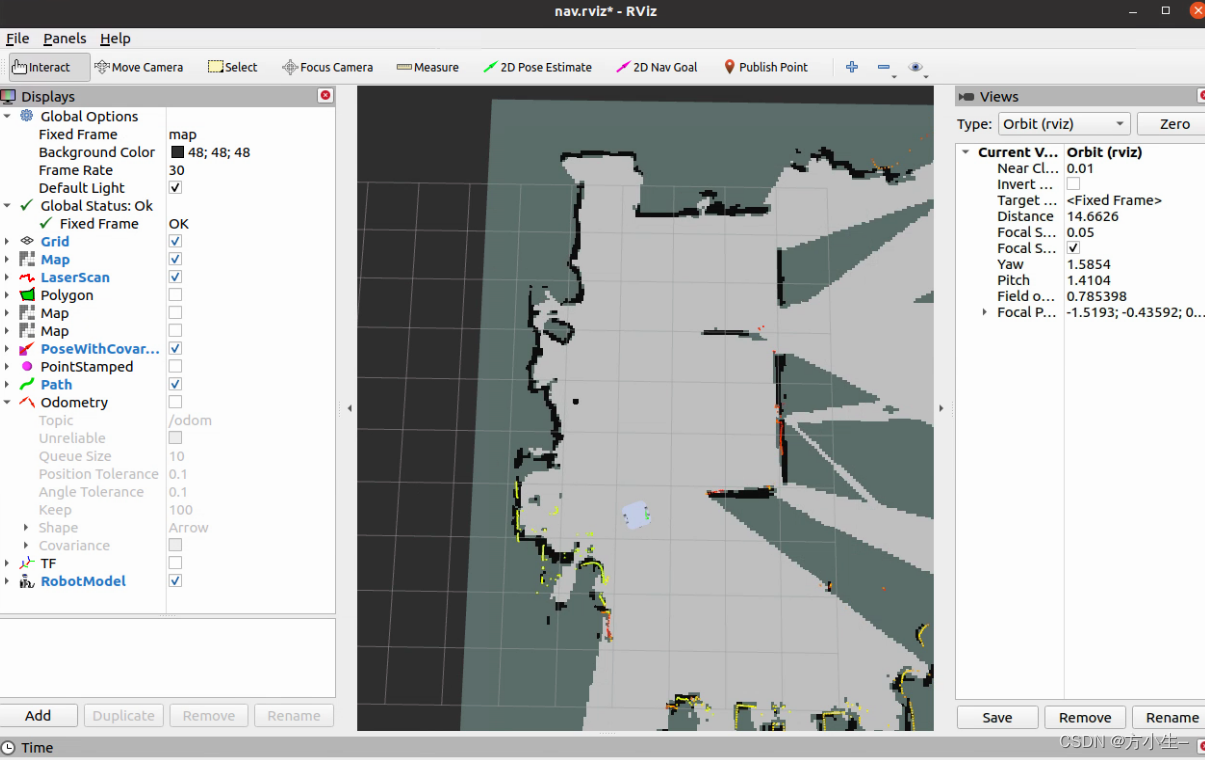
roslaunch castlex_navigation teb_nav.launch
遇到的问题:
编译错误—解决方法:删除build,重新编译
小车跳变—tf有问题,小车底盘发布的是odom-base_footprint的tf变换,没有发布base_footprint-base_link的变换,move_base设置的是base_link,map,odom。使用的是teb算法。
存在问题:
1.建图和定位切换需要修改源码
2.不能自动重定位
相关文章:
0开始配置Cartographer建图和导航定位
0开始配置Cartographer 日期:12-19 硬件:激光雷达IMU 小车的tf变换: 建图配置 lua文件配置:my_robot.lua include "map_builder.lua" include "trajectory_builder.lua"options {map_builder MAP_BUILDE…...

Python中使用SQLite数据库的方法2-2
3.3.2 创建表单及字段 通过“3.2 创建Cursor类的对象”中创建的Cursor类的对象cur创建表单及字段,代码如图5所示。 图5 创建表单及字段 从图5中可以看出,通过Cursor类的对象cur调用了Cursor类的execute()方法来执行SQL语句。该方法的参数即为要指定的S…...
零代码也能玩出花:Mugeda在H5设计中的魔法力量
文章目录 一、Mugeda零代码可视化H5设计工具简介二、Mugeda零代码可视化H5设计实战案例1. 注册并登录Mugeda账号2. 选择模板3. 编辑页面内容4. 添加动画效果5. 预览和发布 三、Mugeda零代码可视化H5设计的优势《Mugeda零代码可视化H5设计实战》内容简介作者简介目录前言/序言 随…...
分布式、CAP 和 BASE 理论
在计算机科学领域,分布式系统是一门极具挑战性的研究方向,也是互联网应用中必不可少的优化实践,而 CAP 理论和 BASE 理论则是分布式系统中的两个关键的概念。 什么是分布式系统 首先,让我们来谈谈分布式系统。你可以将分布式系统…...

django之drf框架(两个视图基类、5个扩展视图类、9个视图子类)
两个视图基类 APIView和GenericAPIView drf提供的最顶层的父类就是APIView,以后所有的类都继承自他 GenericAPIView继承自APIView,他里面封装了一些工能 基于APIViewModelSerializerResposne写5个接口 子路由:app01>>>urls.py …...

23种设计模式学习
设计模式的分类 总体来说设计模式分为三大类: 创建型模式,共五种:工厂方法模式、抽象工厂模式、单例模式、建造者模式、原型模式。 结构型模式,共七种:适配器模式、装饰器模式、代理模式、外观模式、桥接模式、组合…...

php 8.4 xdebug扩展编译安装方法
最新版php8.4 xdebug扩展只能通过编译方式安装, pecl是安装不了的, 编译方法如下 下载最新版xdebug git clone https://github.com/xdebug/xdebug.git 却换入xdebug目录执行编译安装xdebug cd xdebug phpize./configure --enable-xdebugmakemake install3. 配置启用xdebug 这…...

66biolinks v42.0.0 已注册 – 生物短链接、URL 缩短器、QR 码和 Web 工具 (SAAS) 源码
66biolinks v42.0.0:全能生物短链接与网络工具平台 一、开篇介绍 66biolinks v42.0.0是一款集生物链接、URL缩短器、二维码和网络工具于一体的综合性软件解决方案。作为社交生物链接平台的佼佼者,66biolinks提供了全方位的功能,旨在满足用户…...

《Vue2.X 进阶知识点》- 防 ElementUI Divider 分割线
前言 使用 el-divider 背景为白色是没问题的。 但当背景换成其它颜色,问题就出现了!! 仔细看原来是两层,默认背景色是白色。 想着把背景色改为透明应该能用,结果发现背面是一条实线,难怪要用白色遮挡…不符…...

【第十二课】KMP算法(acwing-831 / c++代码 / 思路 / 视频+博客讲解推荐)
目录 暴力做法 代码如下 KMP算法 不同的next求法-----视频讲解/博客推荐 视频推荐 博客推荐 课本上的方法- prefix的方法- 求next数组思路---next数组存放前缀表的方式 s和p匹配思路 代码如下 暴力做法 遍历s主串中每一个元素,如果该元素等于模板串p中…...

JSON 简介
JSON是什么?(了解) JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,常用于Web应用程序之间的数据传输。 JSON格式是一种文本格式,用于描述数据的结构和内容。它由两种基本元素组成:键值对和…...

Impala4.x源码阅读笔记(三)——Impala如何管理Iceberg表元数据
前言 本文为笔者个人阅读Apache Impala源码时的笔记,仅代表我个人对代码的理解,个人水平有限,文章可能存在理解错误、遗漏或者过时之处。如果有任何错误或者有更好的见解,欢迎指正。 上一篇文章Impala4.x源码阅读笔记࿰…...

Ubuntu2204配置samba
0.前情说明 samba服务器主要是用来局域网共享文件的,如果想公网共享可能行不通,我已经踩坑一天了 所以说如果你想满足公网samba共享你就可以不要看下去了 1.参考连接 Ubuntu 安装 Samba 服务器_ubuntu安装samba服务器-CSDN博客 2.安装samba服务 sud…...
AVL树(超详解)
文章目录 前言AVL树的概念AVL树的实现定义AVL树insert 单旋左单旋右单旋左单旋代码右单旋代码 双旋左右双旋右左双旋 测试AVL树的性能 前言 AVL树是怎么来的呢? 我们知道搜索二叉树会存在退化问题,退化以后就变成单支或者接近单支。 它的效率就变成O(N)…...

禁止浏览器记住密码和自动填充 element-ui+vue
vue 根据element-ui 自定义密码输入框,防止浏览器 记住密码和自动填充 <template><divclass"el-password el-input":class"[size ? el-input-- size : , { is-disabled: disabled }]"><inputclass"el-input__inner"…...
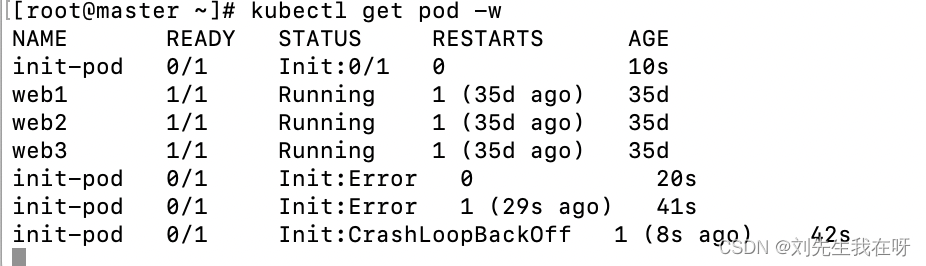
K8s实战-init容器
概念: 初始化容器的概念 比如一个容器A依赖其他容器,可以为A设置多个 依赖容易A1,A2,A3 A1,A2,A3要按照顺序启动,A1没有启动启动起来的 话,A2,A3是不会启动的,直到所有的静态容器全 部启动完毕…...

Vue3.2 自定义指令详解与实战
一、介绍 在Vue3中,自定义指令为开发者提供了一种灵活的方式来扩展Vue的HTML模板语法,使其能够执行特定的DOM操作或组件逻辑。不同于Vue2.x中的全局和局部指令注册方式,Vue3引入了Composition API,这使得自定义指令的编写和使用更…...

XV-3510CB振动陀螺仪传感器
XV-3510CB传感器是一款振动陀螺仪传感器,具有卓越的稳定性和可靠性,超小的封装尺寸SMD53.21.3mm,密封提供了良好的可持续环保能力,采用振动晶体,该传感器具有稳定的性能和超长的寿命。振动晶体的振动能够提供更为精确的…...

设计模式Java向
设计原则: 开闭原则: 用例对象和提供抽象功能进行分割,用例不变,抽象功能被实现,用于不断的扩展,于是源代码不需要进行修改,只在原有基础上进行抽象功能的实现从而进行代码扩展。不变源于代码…...
图片素材管理软件Eagle for mac提高素材整理维度
Eagle for mac是一款图片素材管理软件,支持藏网页图片,网页截屏,屏幕截图和标注,自动标签和筛选等功能,让你设计师方便存储需要的素材和查找,提供工作效率。 Eagle mac软件介绍 Eagle mac帮助你成为更好、…...

基于CircuitPython与ANCS协议打造iOS蓝牙通知显示器
1. 项目概述:打造你的专属iOS通知“小秘书”你是否也经历过这样的场景:手机放在包里或口袋里,每次有消息进来,都得掏出来看一眼,结果可能只是个无关紧要的推送,不仅打断了手头的工作,还白白消耗…...
基于CircuitPython与BLE的NeoPixel智能穿戴灯光项目实战
1. 项目概述:打造你的第一顶可编程发光帽 几年前,当我第一次在Maker Faire上看到有人戴着一顶能随着音乐节奏变换色彩的帽子时,我就被深深吸引了。那不仅仅是一个电子项目,更像是一件充满个性的可穿戴艺术品。从那时起࿰…...

量子通信中的级联环图码技术解析
1. 量子通信与量子中继器概述量子通信的核心挑战在于量子态在传输过程中极易受到环境噪声和信道损耗的影响。与传统经典通信不同,量子信息无法被简单地放大或复制(受限于量子不可克隆定理),这使得长距离量子通信的实现面临巨大困难…...

Kubernetes Pod安全标准:构建零信任的容器运行环境
Kubernetes Pod安全标准:构建零信任的容器运行环境 一、Pod安全标准的核心概念与演进 1.1 容器安全的演进历程 容器技术的普及带来了部署效率的革命性提升,但同时也引入了新的安全挑战。从Docker早期的容器逃逸漏洞到Kubernetes集群的大规模安全事件&…...

从零打造互动徽章:激光切割与电容触摸的软硬件融合实践
1. 项目概述与核心思路如果你参加过技术大会或者创客市集,一定对那些闪烁着酷炫灯光、能与人互动的徽章印象深刻。这类被称为“Badge”的可穿戴设备,早已超越了单纯的身份标识功能,成为了展示技术、创意和社群文化的微型平台。今天要分享的&a…...

双碳目标下太阳辐射预报模式【WRF-SOLAR】模拟方法及改进技术在气象、农林生态、电力等相关领域中的实践应用
太阳能是一种清洁能源,合理有效开发太阳能资源对减少污染、保护环境以及应对气候变化和能源安全具有非常重要的实际意义,为了实现能源和环境的可持续发展,近年来世界各国都高度重视太阳能资源的开发利用;另外太阳辐射的光谱成分、…...
)
【信息科学与工程学】计算机科学与自动化 第十篇 芯片设计04(5)
载流子统计与输运函数方程式详表 1. 载流子统计基础 (zailiu-1 ~ zailiu-100) 序号 名称 数学表达式/核心描述 参数说明 物理意义 应用场景 条件描述 zailiu-1 麦克斯韦-玻尔兹曼分布 f(E)=Ae−E/(kBT)或 f(v)=(2πkBTm)3/2e−mv2/(2kBT) E: 能量, v: 速度,…...

基于OpenClaw构建智能家居环境感知系统:从传感器到自动化规则
1. 项目概述与核心价值如果你正在捣鼓一个智能家居系统,尤其是围绕着OpenClaw这类AI助手来构建,那你可能和我一样,经常遇到一个痛点:家里的设备虽然能联网、能控制,但它们大多“又聋又瞎”。空调能开能关,但…...

流分析模式:实时数据处理的设计模式与最佳实践
流分析模式:实时数据处理的设计模式与最佳实践 一、流分析模式的核心概念 1.1 流分析的演进历程 流分析(Stream Analytics)是一种实时数据处理技术,它能够持续处理无限的数据流,并从中提取有价值的信息。 阶段特征处理…...
LunaTranslator完整指南:5步掌握视觉小说实时翻译技巧
LunaTranslator完整指南:5步掌握视觉小说实时翻译技巧 【免费下载链接】LunaTranslator 视觉小说翻译器 / Visual Novel Translator 项目地址: https://gitcode.com/GitHub_Trending/lu/LunaTranslator 想要畅玩日文视觉小说却苦于语言障碍?LunaT…...