基于图搜索的自动驾驶规划算法 - BFS,Dijstra,A*
本文将讲解BFS,Dijstra,A*,动态规划的算法原理,不正之处望读者指正,希望有兴趣的读者能在评论区提出一些这些算法的面试考点,共同学习,一起进步
0 图论基础
图有三种:无向图、有向图、带权重的图
无向图

有向图

带权重的图

1 BFS
广度优先搜索算法
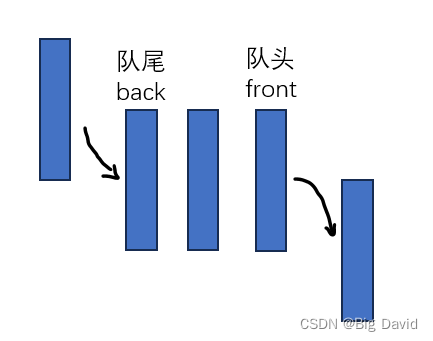
利用队列queue数据结构实现:先进先出
算法流程(伪代码):
BFS(G, start, goal):let Q be queue;Q.push(start);mark start as visited;while (!Q.empty()){v = Q.front();Q.pop();if (v is the goal) return v;for all neighbours n of v in GQ.push(n);n->parent = v;mark n as visited;}
BFS总结:
(1)相同探索所有的方向
(2)如果所有边权重为1,那么用BFS搜索出来的路径是cost最优的
(3)在不同的场景中,不能保证所有的边权重为1,对于这些场景,BFS受限
2 Dijstra
核心思想:
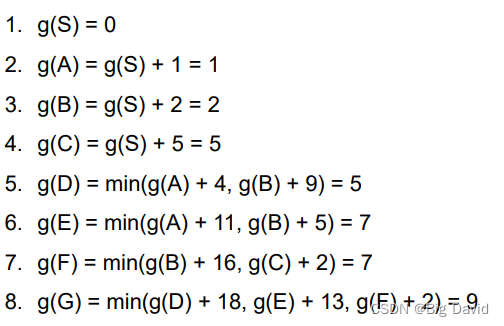
(1)相比BFS,Dijstra维护一个新变量g(n),g(n)表示从起始节点到当前节点的累积成本
(2)从openset(Min-priority queue)中访问累积成本g最低的节点
算法流程(伪代码):
Dijstra(G, start, goal):let open_list be priority_queue;open_list.push(start, 0);g[start] = 0;while (!open_list.empty()){current = open_list.pop();mark current as visited;if (current is the goal) return current;for (all unvisited neightbours next of current in G){next_cost = g[current] + cost(current, next);if (next is not in open_list)open_list.push(next, next_cost);else {if (g[next] > next_cost)g[next] = next_cost;}}}
优点:
(1)Dijstra算法能找到从起始节点到图上所有其他节点的最短路径
(2)Dijstra算法满足最优性
缺点:每次都会从open_list寻找代价最少的节点,但是并不知道终点在哪,如果用这个算法做图中特定两个点的最短路径,是比较低效的
3 A*算法
A*算法手撕版本见手撕A算法(详解A算法)
核心思想:
(1)相比Dijstra,A*将目标点的成本估计为启发式信息以提高效率
(2)启发式函数h(n):表示从节点n到目标的估计成本
(3)评估每个节点的成本函数:f(n)=g(n)+h(n)
(4)从open_list选择f-score最低的节点,而不是Dijstra算法中的g-score
算法流程(伪代码):
Astar(G, start, goal):let open_list be priority_queue;g[start] = 0;f[start] = g[start] + h[start];open_list.push(start, f[start]);while (!open_list.empty()){current = open_list.pop();mark current as visited;if (current is the goal) return current;for all unvisited neighbours next of current in Gnext_cost = g[current] + cost(current, next);if (next is not in open_list)open_list.push(next, next_cost + h[next]);else{if (g[next] > next_cost) {g[next] = next_cost;f[next] = next_cost + h[next];}}}
启发式函数设计
在路径搜索过程中,没有唯一启发函数设计原则,需要根据特定的任务来设计,如果最优性和距离相关,则可以计算节点之间的直线距离来估计
三种常用的距离:
起点: ( p 1 , p 2 ) (p_1, p_2) (p1,p2) 终点: ( q 1 , q 2 ) (q_1, q_2) (q1,q2)
(1)Euclidian distance
d ( p , q ) = ( q 1 − p 1 ) 2 + ( q 2 − p 2 ) 2 d(p,q)=\sqrt{(q_1-p_1)^2+(q_2-p_2)^2} d(p,q)=(q1−p1)2+(q2−p2)2
(2)Manhattan distance
d ( p , q ) = ∣ q 1 − p 1 ∣ + ∣ q 2 − p 2 ∣ d(p,q)=|q_1 - p_1|+|q_2 - p_2| d(p,q)=∣q1−p1∣+∣q2−p2∣
(3)Great circle distance

△ σ = a r c c o s ( s i n ϕ 1 s i n ϕ 2 + c o s ϕ 1 c o s ϕ 2 c o s ( △ λ ) ) \bigtriangleup \sigma =arccos(sin\phi _1sin\phi_2+cos\phi_1cos\phi_2cos(\bigtriangleup\lambda )) △σ=arccos(sinϕ1sinϕ2+cosϕ1cosϕ2cos(△λ))
d = r △ σ d = r\bigtriangleup \sigma d=r△σ
最优性
启发式函数 h ( n ) < c o s t ( n , g o a l ) h(n)<cost(n,goal) h(n)<cost(n,goal)
只要启发式函数提供了小于实际成本的估计,A*将始终找到最优路径,并且通常比Dijstra快
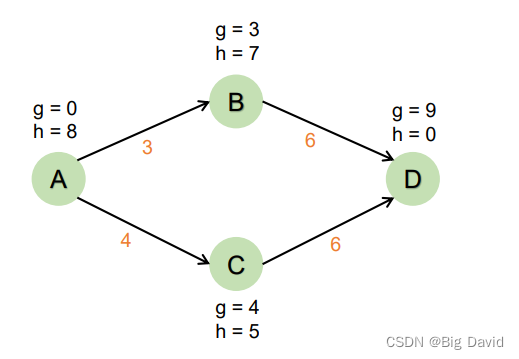
实际上A->B->D是最短路径
因为B的启发式函数高估了对目标的成本
这种高估导致搜索算法相信节点C总成本低于节点B,使得节点C在节点B之前访问,导致结果不是最优路径
在gridmap中如何设计启发式函数

使用8连接,曼哈顿距离启发式高估了成本
欧几里得距离总是可以接受
A*算法的精度和效率

(1) h ( n ) = 0 h(n)=0 h(n)=0:A退化为Dijstra
(2) h ( n ) < c o s t ( n , g o a l ) h(n)<cost(n,goal) h(n)<cost(n,goal):A满足最优性,效率比Dijstra更高
(3) h ( n ) = c o s t ( n , g o a l ) h(n)=cost(n,goal) h(n)=cost(n,goal):A满足最优性,并且有最高的效率
(4) h ( n ) > c o s t ( n , g o a l ) h(n)>cost(n,goal) h(n)>cost(n,goal):A不满足最优性,高估实际成本
BFS、Dijstra、A*总结:
| BFS | Dijstra | A* |
|---|---|---|
| (1)BFS算法会朝着周围等价扩展 | (1)相比BFS,Dijstra倾向于累积成本最小化,不是平等地搜索所有可能的路径,能在加权图中满足最优性 | (1)A*是Dijstra的修改,添加了启发式函数h(n)提高搜索效率 |
| (2)如果每条边权重为1,BFS搜索出来的path也是最优解 | (2)如果每条边权重为1,BFS=Dijstra | (3)启发式函数的设计会影响效率和准确性 |
搜索算法可视化参考:http://qiao.github.io/PathFinding.js/visual/
4 动态规划
- 定义:
一种计算机编程方式,首先把算法问题分解为子问题,求解这些子问题,并把这些结果保存下来,然后优化子问题找到整个问题的最优解
- 动态规划的性质:
(1)最优子结构
面对一个大问题可以分解为一系列子问题。如果能找到每个小问题的最优解,并且能够把小问题拼成大的问题。这种问题就叫最优子结构
(2)重复的子问题
动态规划不会重新计算重复的子问题,会事先保存结果
3. 计算方法
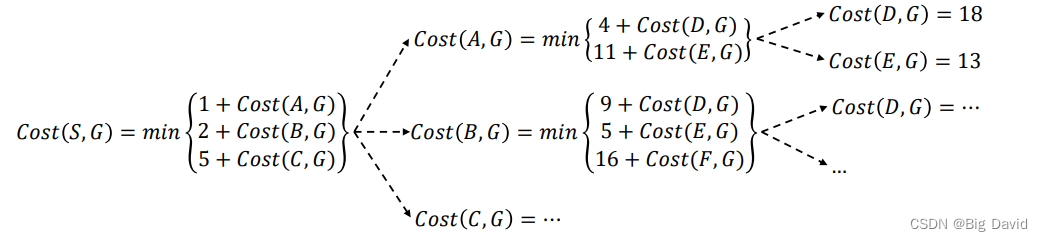
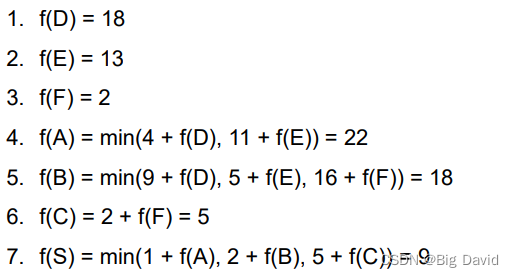
(1)前向法
(2)逆向法
相关文章:
基于图搜索的自动驾驶规划算法 - BFS,Dijstra,A*
本文将讲解BFS,Dijstra,A*,动态规划的算法原理,不正之处望读者指正,希望有兴趣的读者能在评论区提出一些这些算法的面试考点,共同学习,一起进步 0 图论基础 图有三种:无向图、有向…...
Spring系列学习四、Spring数据访问
Spring数据访问 一、Spring中的JDBC模板介绍1、新建SpringBoot应用2、引入依赖:3、配置数据库连接,注入dbcTemplate对象,执行查询:4,测试验证: 二、整合MyBatis Plus1,在你的项目中添加MyBatis …...
)
HBase 创建不分裂的表 ( 禁止 Table Split )
注意:由于 HBase 版本众多,配置表的语法在不同版本上会有差异,本文介绍的配置方法是在 1.4.9 版本上测试的,使用 HBase 2.0 的版本需要核实并修改相关配置方法! 有时候,出于特殊需要,我们希望对…...

docker入门概念详解
本篇文章对docker的一些基础概念和周边概念进行了详细解释。帮助你可以很好的理解docker是用来干什么的,docker是怎么工作的。其中有docker所运用到的技术解释,docker的不同发展版本,dokcer的架构,docker的生态等等详解。希望本片…...

C++程序设计实践报告【格式】
C程序设计实践报告 原XX工业学院 C程序设计实践报告 题目: 专业: 学号: 姓名: 年 月 日 目录 一、绪…...

浅谈数据仓库运营
一、背景 企业每天都会产生大量的数据,随着时间增长,数据会呈现几何增长,尤其在系统基建基础好的公司。好的数据仓库需要提前规划和好的运营,才能支持企业的发展,为企业提供数据分析基础。 二、目标 提高数据仓库存储…...
系列六、Consul
一、Consul 1.1、概述 Consul是一套开源的分布式服务发现和配置管理系统,由HashiCorp公司用Go语言开发。他提供了微服务系统中的服务治理、配置中心、控制总线等功能。这些功能中的每一个功能都可以单独使用,也可以一起使用以构建全方位的服务网格&…...

Java集合/泛型篇----第一篇
系列文章目录 文章目录 系列文章目录前言一、ArrayList和linkedList的区别二、HashMap和HashTable的区别三、Collection包结构,与Collections的区别四、泛型常用特点前言 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站…...

集合使用注意事项
集合使用注意事项总结 集合判空 判断所有集合内部的元素是否为空,使用 isEmpty() 方法,而不是 size()0 的方式 这是因为 isEmpty() 方法的可读性更好,并且时间复杂度为 O(1)。 集合转 Map 在使用 java.util.stream.Collectors 类的 toMap()…...

什么是 JavaScript 中的 WeakMap
在 JavaScript 中,WeakMap 是一种特殊的 Map 数据结构,它允许将对象作为键,而且键值对是弱引用的关系。 与 Map 不同的是,WeakMap 的键只能是对象,不能是其他类型的值。同时,当键对象没有任何引用时&#…...

nodejs+vue+ElementUi农产品团购销售系统zto2c
目标是为了完成小区团购平台的设计和实现,在疫情当下的环境,方便小区业主购入生活所需,减小居民的生活压力 采用B/S模式架构系统,开发简单,只需要连接网络即可登录本系统,不需要安装任何客户端。开发工具采…...
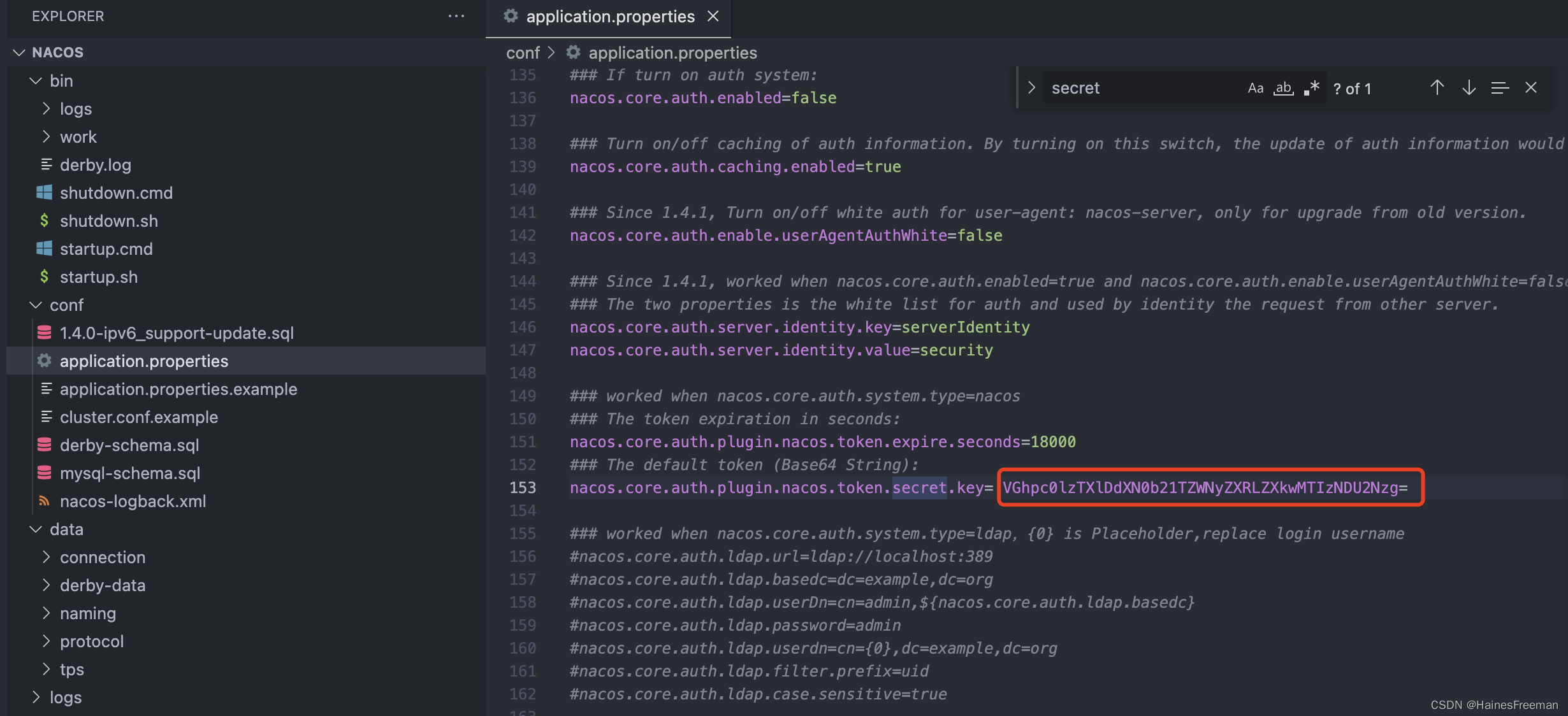
nacos入门篇001-安装与启动
1、下载zip包 我这里下载的是版本2.2.0 Nacos 快速开始 2、修改配置文件 2.1集群模式修改成单例模式 vi startup.sh 2.2 修改数据库配置信息 3、初始化数据库 3.1 创建db名称:db_nacos 3.2 执行mysql-schema.sql 3.3 执行完截图: 4、运行脚本启动 …...

WordPress主题大前端DUX v8.3源码下载
DUX主题8.3版本更新内容: 新增:Cloudflare Turnstile 免费验证功能 新增:子菜单页面模版,支持多级页面 新增:手机端文章内表格自动出现横向滚动条,可集体或单独设置滚动宽度 新增:标签云页面模版…...
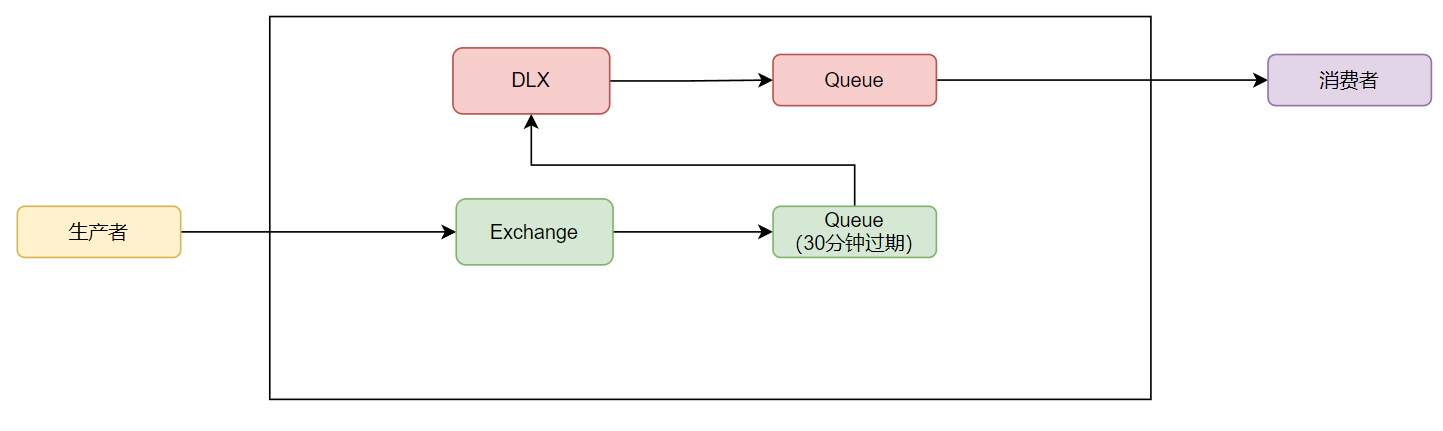
RabbitMQ之快速入门、上手
前言 学习一样新技术、新框架,最重要的是学习其思想、原理。即原理性思维。 如果是因为工作原因,需要快速上手RabbitMQ,本篇或许适合你。 核心概念 Connection:publisher/consumer 和 broker 之间的 TCP 连接Channel…...
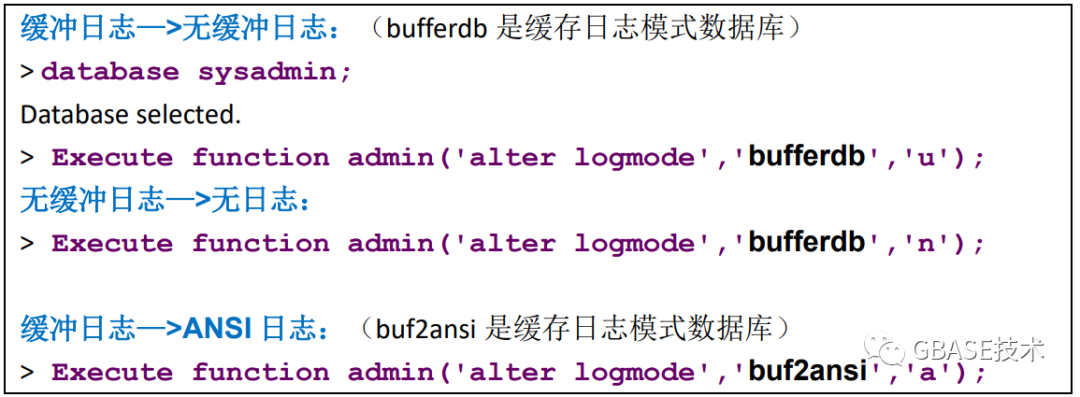
GBASE南大通用-GBase 8s数据库日志模式及切换
一、 GBase 8s数据库共有以下 4 种日志模式:无日志模式、缓冲日志模式、无缓冲日志模式、ANSI 模式。详细介绍如下: 1、无日志模式(Non logging): 采用无日志模式时,所有 DML 操作都不会被记录到日志中&…...

侵入式和非侵入式微服务框架的比较
微服务框架可以分为侵入式和非侵入式两种。侵入式框架需要对现有代码进行改造,而非侵入式框架则无需改造现有代码。 侵入式框架 侵入式框架将微服务治理功能嵌入到应用程序中,需要修改应用程序的代码。这种框架的优点是可以提供更强大的功能࿰…...

Go语言程序设计-第5章--函数
Go语言程序设计-第5章–函数 5.1 函数声明 每个函数声明都包含一个名字、一个形参列表、一个可选的返回列表以及函数体: func name(parameter-list) (result-list) {body }func add(x int, y int) int { return x y} func sub(x, y int) (z int) {z x - y; return} func f…...

数据被锁?被.mkp 勒索病毒攻击后的拯救行动
导言: 网络安全面临着越来越多的挑战,而.mallox勒索病毒则成为数字威胁中的一股强大势力。它的威胁不仅体现在其高度复杂的加密算法上,还表现在对受感染系统的深度渗透和数据的极大破坏上。以下是.mallox勒索病毒的主要威胁:如不…...

Fine-Tuning Language Models from Human Preferences
Abstract 奖励学习(reward learning)可以将强化学习(RL)应用到由人类判断定义奖励的任务中,通过询问人类问题来构建奖励模型。奖励学习的大部分工作使用了模拟环境,但是关于价值的复杂信息经常是以自然语言的形式表达的。我们相信语言奖励学习是使强化学习在现实世界任务…...
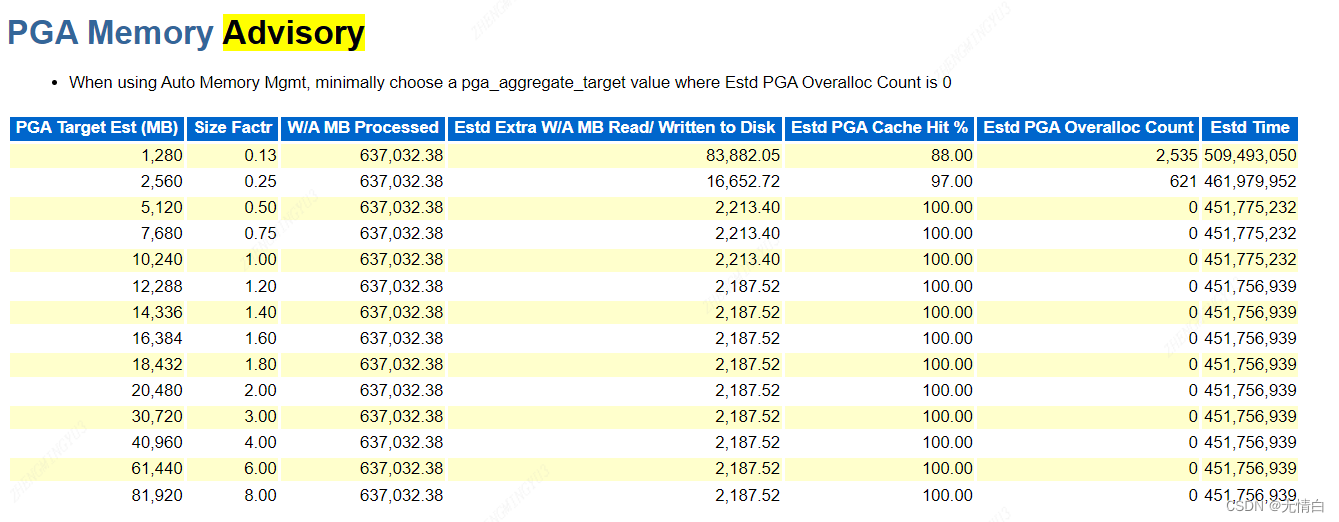
提升数据库性能的关键指南-Oracle AWR报告
文章目录 一、了解AWR报告:数据库性能的仪表盘二、生成AWR报告三、解读AWR报告的关键部分1.报告开头的系统基础信息2.ADDM发现3.负载概览(Load Profile)4.参数文件5.顶级前台等待事件6.SQL 统计信息-顶级SQL7.SGA Advisory AND PAG Advisory 一、了解AWR报告&#x…...

WarcraftHelper完整指南:5分钟让魔兽争霸3在现代电脑上完美运行
WarcraftHelper完整指南:5分钟让魔兽争霸3在现代电脑上完美运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在现代Win…...

AI智能体交互体验优化:从对话管理到个性化记忆的工程实践
1. 项目概述:从“Agent Experience”看智能体交互体验的演进最近在GitHub上看到一个挺有意思的项目,叫“agent-experience”,作者是dhruvvsukhadia。光看这个名字,可能很多人会有点懵——这到底是做什么的?是开发AI智能…...

从零构建高效项目脚手架:自动化项目初始化与最佳实践
1. 项目概述:一个为开发者准备的“瑞士军刀”式工具集最近在GitHub上闲逛,发现了一个挺有意思的项目,叫jpKuji/clawstrate。乍一看这个名字,有点摸不着头脑,既不像常见的框架名,也不像某个具体的应用。点进…...

不止于水:用MS动力学模拟和RDF分析,探究任意离子/分子在溶液中的溶剂化结构
从水到多元溶液:MS动力学模拟与RDF分析的高级应用指南 当我们需要理解溶液中离子或分子的行为时,径向分布函数(RDF)分析提供了一个强有力的工具。传统的纯水体系研究固然重要,但现实中的溶液系统往往更为复杂——电解液中的锂离子、蛋白质溶液…...

API集成管理之核心产品核心能力与数据盘点
API集成管理是企业数字化转型中的核心基础设施,它解决的是系统之间如何高效、安全、可控地进行数据交换与业务协同的问题。一套完善的API集成管理方案,能够帮助企业打通数据孤岛、实现能力复用、构建开放生态。本文基于公开资料,对五款代表性…...

QFN测试插座技术解析与应用实践
1. QFN测试插座的技术挑战与解决方案在半导体测试领域,QFN封装器件的测试一直是个棘手问题。这种无引线四方扁平封装虽然节省空间、散热优异,但恰恰因为缺少传统引脚,使得测试接触变得异常困难。我经手过不少QFN测试项目,最头疼的…...

Codepack:标准化开发配置与自动化工具链的工程实践
1. 项目概述:一个为开发者准备的“代码行囊” 最近在GitHub上闲逛,发现了一个挺有意思的项目,叫 JasonLovesDoggo/codepack 。乍一看名字,你可能会觉得这又是一个普通的代码库或者工具集。但点进去仔细研究后,我发现…...

为个人开源项目寻找高性价比大模型API的选型与实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为个人开源项目寻找高性价比大模型API的选型与实践 对于个人开发者或学生而言,运营一个GitHub开源项目常常需要在有限的…...
)
人工智能体共情能力模块设计与实践(下)
八、实验设计方案 8.1 数据集设计 建议构建一个多场景中文共情对话数据集。 场景分类 场景 示例 客服投诉 订单、退款、物流、系统故障 学习辅导 学不会、考试焦虑、代码报错 工作压力 加班、沟通冲突、任务失败 情绪倾诉 难过、焦虑、失落 决策支持 不知道如何选择 高风险表…...

QQ音乐加密文件解密终极指南:qmcdump实战深度解析
QQ音乐加密文件解密终极指南:qmcdump实战深度解析 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否遇到…...