力扣:62. 不同路径(动态规划,附python二维数组的定义)
题目:
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
示例 1:
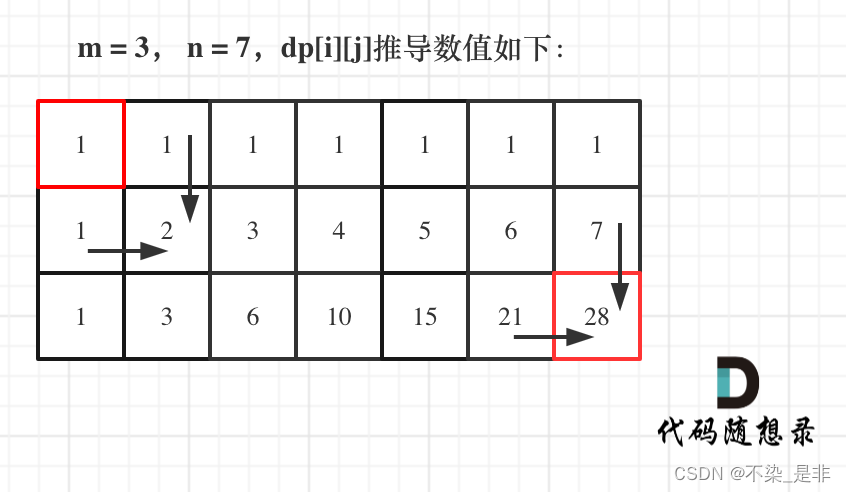
输入:m = 3, n = 7
输出:28
示例 2:
输入:m = 3, n = 2
输出:3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
- 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右
- 向下 -> 向右 -> 向下
示例 3:
输入:m = 7, n = 3
输出:28
示例 4:
输入:m = 3, n = 3
输出:6
提示:
1 <= m, n <= 100
题目数据保证答案小于等于 2 * 109
思路:
刚看到这道题第一时间想不到这跟动态规划有什么关系,这不是图的深搜吗?
但大家试过之后就会发图的深搜会超时。
动态规划:
机器人从(0 , 0) 位置出发,到(m - 1, n - 1)终点。
按照动规五部曲来分析:
- 确定dp数组,以及下标的含义
这里要明确dp数组的含义,定义dp数组是为了找到不同路径,
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
- 确定递推公式
这道题的递归公式不像之前的题一下就能看出来,
想要求dp[i][j],只能有两个方向来推导出来,即dp[i - 1][j] 和 dp[i][j - 1]。
此时在回顾一下 dp[i - 1][j] 表示啥,是从(0, 0)的位置到(i - 1, j)有几条路径,dp[i][j - 1]同理。
那么很自然,dp[i][j] = dp[i - 1][j] + dp[i][j - 1],因为dp[i][j]只有这两个方向过来。
可能有人会疑惑 dp[i - 1][j] 向下走一步就到dp[i][j],dp[i][j - 1]向右走一步就到dp[i][j],那为什么dp[i][j] 不等于 dp[i - 1][j] + dp[i][j - 1] + 1 + 1 呢?这里要明白dp数组的含义,这里dp数组求的是路径而不是步数,你走一步路径数并没有发生变化。
- dp数组的初始化
如何初始化呢,首先dp[i][0]一定都是1,因为从(0, 0)的位置到(i, 0)的路径只有一条,那么dp[0][j]也同理。
- 确定遍历顺序
这里要看一下递推公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1],dp[i][j]都是从其上方和左方推导而来,那么从左到右一层一层遍历就可以了。
这样就可以保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值的。
- 举例推导dp数组
如图所示:
这里要说明一下dp数组的日志打印,如果你提交不通过,你可以直接输出dp数组,看看你是哪一步出现问题,然后对症下药。
定义二维数组
写过很多要定义二维数组的题了,但依然是一写就忘,这里稍微说一下python中二维数组的定义,
方法一:
dp = [[0] * n for _ in range(m)]
方法二(跟一其实是一个东西):
dp = [[0 for i in range(n)] for j in range(m)]
方法三(NumPy库):
import numpy as np# 创建一个n×m的二维数组,初始值为0 np.ones((n, m)) 初始值为1
array = np.zeros((n, m))
完整代码:
class Solution:def uniquePaths(self, m: int, n: int) -> int:# 创建一个二维列表用于存储唯一路径数dp = [[0] * n for _ in range(m)]# 设置第一行和第一列的基本情况for i in range(m):dp[i][0] = 1for j in range(n):dp[0][j] = 1# 计算每个单元格的唯一路径数for i in range(1, m):for j in range(1, n):dp[i][j] = dp[i - 1][j] + dp[i][j - 1]# 返回右下角单元格的唯一路径数return dp[m - 1][n - 1]
复杂度分析:
- 时间复杂度:O(m × n)
- 空间复杂度:O(m × n)
PS:
做完本题可以接着做力扣:63. 不同路径 II,完全一样的思路。
详细见:力扣:63. 不同路径 II(动态规划)
相关文章:
力扣:62. 不同路径(动态规划,附python二维数组的定义)
题目: 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。 问总共有多少条不同的路径&…...
2022年全球运维大会(GOPS深圳站)-核心PPT资料下载
一、峰会简介 GOPS 主要面向运维行业的中高端技术人员,包括运维、开发、测试、架构师等群体。目的在于帮助IT技术从业者系统学习了解相关知识体系,让创新技术推动社会进步。您将会看到国内外知名企业的相关技术案例,也能与国内顶尖的技术专家…...

8868体育助力意甲罗马俱乐部 迪巴拉有望付出
8868体育助力意甲罗马俱乐部 迪巴拉有望付出 意甲罗马俱乐部是8868体育合作球队之一,本赛季,在意甲第14轮的比赛中,罗马客场2-1战胜萨索洛,积分上升到意甲第4位。 有报道称,迪巴拉在对阵佛罗伦萨的比赛中受伤ÿ…...

java设计模式实战【策略模式+观察者模式+命令模式+组合模式,混合模式在支付系统中的应用】
引言 在代码开发的世界里,理论知识的重要性毋庸置疑,但实战经验往往才是知识的真正试金石。正所谓,“读万卷书不如行万里路”,理论的学习需要通过实践来验证和深化。设计模式作为软件开发中的重要理论,其真正的价值在…...

小程序wx:if 和hidden的区别?
在小程序中,wx:if 和 hidden 是用于条件渲染的两种不同方式。 选择使用哪种方式取决于具体情况。如果条件变化频繁或节点包含复杂的子节点,可以考虑使用 wx:if 进行条件渲染;如果条件变化较少且节点结构简单,可以使用 hidden 控制…...
自动驾驶学习笔记(二十三)——车辆控制模型
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo开放平台9.0专项技术公开课》免费报名—>传送门 文章目录 前言 运动学模型 动力学模型 总结…...

Linux Shell 015-文本双向覆盖重定向工具tee
Linux Shell 015-文本双向覆盖重定向工具tee 本节关键字:Linux、Bash Shell、文本双向覆盖重定向工具 相关指令:tee、echo、cat tee介绍 tee工具是从标准输入读取并写入到标准输出和文件,即:双向覆盖重定向(屏幕输出…...
【PyQt】(自定义类)QIcon派生,更易用的纯色Icon
嫌Qt自带的icon太丑,自己写了一个,主要用于纯色图标的自由改色。 当然,图标素材得网上找。 Qt原生图标与现代图标对比: 没有对比就没有伤害 Qt图标 网络素材图标 自定义类XJQ_Icon: from PyQt5.QtGui import QIc…...

【mysql】数据处理格式化、转换、判断
数据处理 判断是否超时,时间是否大于当前时间计算分钟数时间格式化处理如果数值类型进行转换字符类型字符拼接case-when代替if-else判断数据空(特殊:含空数据、空字符处理) select /*判断是否超时,时间是否大于当前…...

深入探索Java中的UDP网络通信机制
在网络通信中,UDP(User Datagram Protocol,用户数据报协议)是一种无连接的协议,它在某些情况下比TCP更适合,尤其是在要求速度快、对数据准确性要求相对较低的场景下。本文将介绍如何使用Java进行UDP网络通信…...
List常见方法和遍历操作
List集合的特点 有序: 存和取的元素顺序一致有索引:可以通过索引操作元素可重复:存储的元素可以重复 List集合的特有方法 Collection的方法List都继承了List集合因为有索引,所以有了很多操作索引的方法 ublic static void main…...
【基础篇】一、认识JVM
文章目录 1、虚拟机2、Java虚拟机3、JVM的整体结构4、Java代码的执行流程5、JVM的三大功能6、JVM的分类7、JVM的生命周期 1、虚拟机 虚拟机,Virtual Machine,一台虚拟的计算机,用来执行虚拟计算机指令。分为: 系统虚拟机&#x…...

DrGraph原理示教 - OpenCV 4 功能 - 颜色空间
前言 前段时间,甲方提出明确需求,让把软件国产化。稍微研究了一下,那就转QT开发,顺便把以前的功能代码重写一遍。 至于在Ubuntu下折腾QT、OpenCV安装事宜,网上文章很多,照猫画虎即可。 这个过程࿰…...
听GPT 讲Rust源代码--src/tools(36)
File: rust/src/tools/clippy/clippy_lints/src/loops/empty_loop.rs 在Rust源代码中,empty_loop.rs文件位于src/tools/clippy/clippy_lints/src/loops/目录下,它的作用是实现并提供一个名为EMPTY_LOOP的Lint规则。Clippy是一个Rust的静态分析工具&#…...

学生数据可视化与分析工具 vue3+flask实现
目录 一、技术栈亮点 二、功能特点 三、应用场景 四、结语 学生数据可视化与分析工具介绍 在当今的教育领域,数据驱动的决策正变得越来越重要。为了满足学校、教师和学生对于数据深度洞察的需求,我们推出了一款基于Vue3和Flask编写的学生数据可视化…...
uni-app condition启动模式配置
锋哥原创的uni-app视频教程: 2023版uniapp从入门到上天视频教程(Java后端无废话版),火爆更新中..._哔哩哔哩_bilibili2023版uniapp从入门到上天视频教程(Java后端无废话版),火爆更新中...共计23条视频,包括:第1讲 uni…...

网大为卸任腾讯CXO;Midjourney 1 月训练视频模型;2023年马斯克赚了7700亿
投融资 • 2023 年大型科技公司在生成式 AI 初创企业上的投资远超风险投资集团• 恒信东方与无锡政府合作成立布局 MR/XR 技术及 3D 数字资产 AIGC 产业投资基金• 新公司法完善注册资本认缴登记制度• 网大为卸任腾讯CXO,曾促成南非MIH的投资• 宁波蔚孚科技完成数…...

据报道,微软的下一代 Surface 笔记本电脑将是其首款真正的“人工智能 PC”
明年,微软计划推出 Surface Laptop 6和 Surface Pro 10,这两款设备将提供 Arm 和 Intel 两种处理器选项。不愿意透露姓名的不透露姓名人士透露,这些新设备将引入先进的人工智能功能,包括配备下一代神经处理单元 (NPU)。据悉&#…...
Springer build pdf乱码
在textstudio中编辑时没有错误,在editor manager生成pdf时报错。 首先不要改源文件,着重看你的上传顺序: 将.tex文件,.bst文件,.cls文件,.bib文件, .bbl文件的类型,在editor manager中是Item。…...
k8s之kudeadm
kubeadm来快速的搭建一个k8s的集群: 二进制搭建适合大集群,50台以上主机 kubeadm更适合中小企业的业务集群 master:192.168.233.91 docker kubelet lubeadm kubectl flannel node1:192.168.233.92 docker kubelet lubeadm kubectl flannel…...

大模型高效化实战:从量化剪枝到推理部署的完整指南
1. 大模型高效化:从“巨无霸”到“精悍战士”的必经之路如果你和我一样,在过去的几年里深度参与过大语言模型的部署和应用,那你一定对“模型太大”这个问题深有体会。动辄几十GB甚至上百GB的模型文件,对显存的贪婪吞噬,…...

离线语音识别性能提升:Vosk API的3大架构优化策略实践
离线语音识别性能提升:Vosk API的3大架构优化策略实践 【免费下载链接】vosk-api Offline speech recognition API for Android, iOS, Raspberry Pi and servers with Python, Java, C# and Node 项目地址: https://gitcode.com/GitHub_Trending/vo/vosk-api …...

流处理优化:提高实时数据处理性能
流处理优化:提高实时数据处理性能 一、流处理优化概述 1.1 流处理优化的定义 流处理优化是指通过优化流处理系统的性能、吞吐量和延迟,提高实时数据处理能力的过程。它涉及优化数据处理管道、资源配置和算法实现。 1.2 流处理优化的价值 低延迟ÿ…...

3步精通UE4SS游戏Mod开发:从注入到实战完全指南
3步精通UE4SS游戏Mod开发:从注入到实战完全指南 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS UE…...

别再复制粘贴了!手把手教你封装一个可复用的Qt文本编辑器核心组件类
从零封装高复用Qt文本编辑器核心类:工程化实践指南 在Qt开发中,文本编辑器是最常见的功能需求之一。许多开发者习惯将所有逻辑堆砌在MainWindow类中,导致代码臃肿、难以维护和复用。本文将带你从工程化角度重构文本编辑器,将其核心…...

Python网络爬虫实战:构建自动化招聘信息聚合工具JobClaw
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫 JobClaw。这名字起得挺形象,“Claw”是爪子的意思,合起来就是“工作抓取器”。简单来说,它是一个帮你从各大招聘网站上自动抓取、聚合和分析职位信息的工具。对于正在找…...

C#元组类型简介
元组是 C# 7.0 引入的轻量级数据结构,用于临时组合多个值,无需定义专门的类或结构。 元组是有序的数据结构,成员按声明/创建时的顺序排列。(这里的元组只指值元组)元组类型在C#7.0前是有一个专门的内置类型,…...

工业控制系统安全实践:基于ISA-62443-3-3标准的OT/IT融合指南
1. 项目概述:当工业安全遇上新标准在工业自动化领域摸爬滚打了十几年,我见过太多因为安全标准“两张皮”而引发的头疼事。一边是负责生产线的工控工程师,他们的核心信条是“稳定压倒一切”,任何可能影响PLC运行周期、导致电机意外…...

如何解决QQ音乐下载的歌曲在其他设备上无法播放的问题
如何解决QQ音乐下载的歌曲在其他设备上无法播放的问题 【免费下载链接】qmcflac2mp3 直接将qmcflac文件转换成mp3文件,突破QQ音乐的格式限制 项目地址: https://gitcode.com/gh_mirrors/qm/qmcflac2mp3 你是否曾经在QQ音乐下载了喜欢的歌曲,却发现…...

为Odoo ERP构建安全的AI数据访问层:基于权限治理的语义查询实践
1. 项目概述:为Odoo ERP构建一个受治理的AI数据访问层如果你正在使用Odoo管理企业业务,同时又希望让AI助手(比如Claude、Cursor)能够安全地查询销售数据、分析库存状况,而不是让它们直接面对你的生产数据库写SQL&#…...