RT-Thread:SPI万能驱动 SFUD 驱动Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动
关键词:SFUD,FLASH,W25Q64,W25Q128,STM32F407
说明:RT-Thread 系统 使用 SPI万能驱动 SFUD 驱动 Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动。
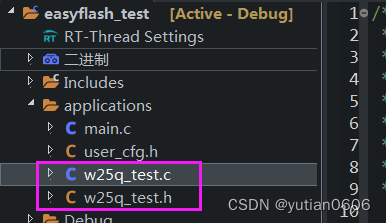
提示:SFUD添加后的存储位置

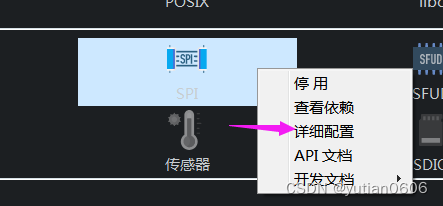
1.打开RT-Thread Setting SPI SFUD

打开 SFUD ,SPI

右键-详细配置
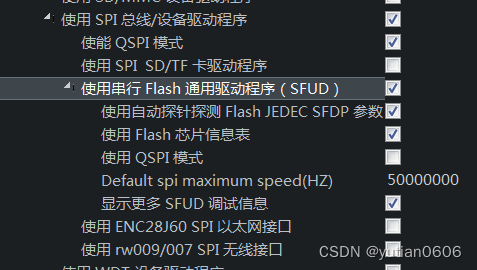
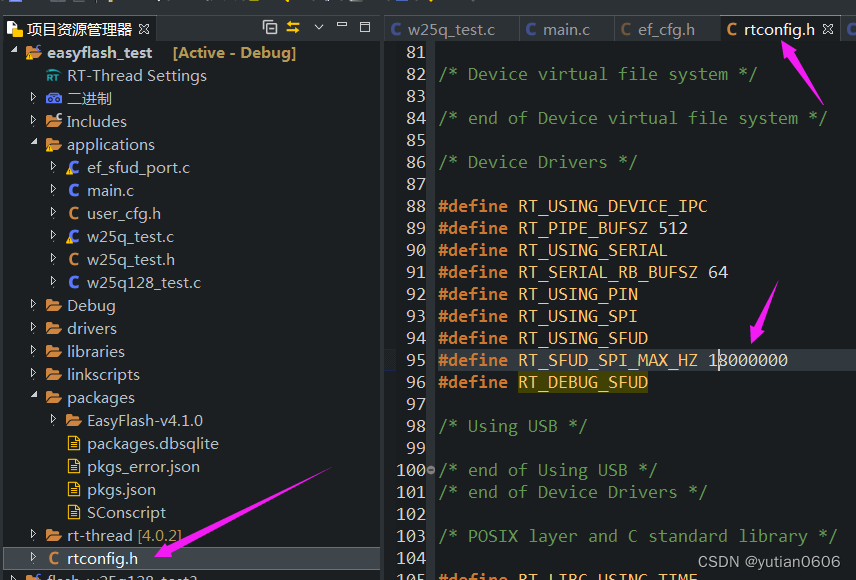
SFUD的配置 放置于如下头文件 rtconfig.h
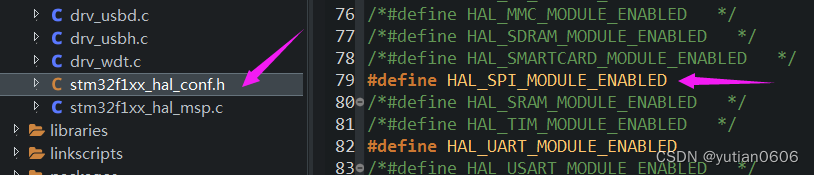
2.开启board.h/stm32F1xx_hal_config.h中关于SPI的宏定义
STEP 1:第一步打开RT-Thread Setting SPI SFUD 中已经操作实现。
STEP 2:定义与spi总线相关的宏,例如#define BSP_USING_SPI1

STEP 4:修改您的stm32xxxx_hal_config.h文件以支持spi外围设备。 定义与外围设备相关的宏,例如#define HAL_SPI_MODULE_ENABLED
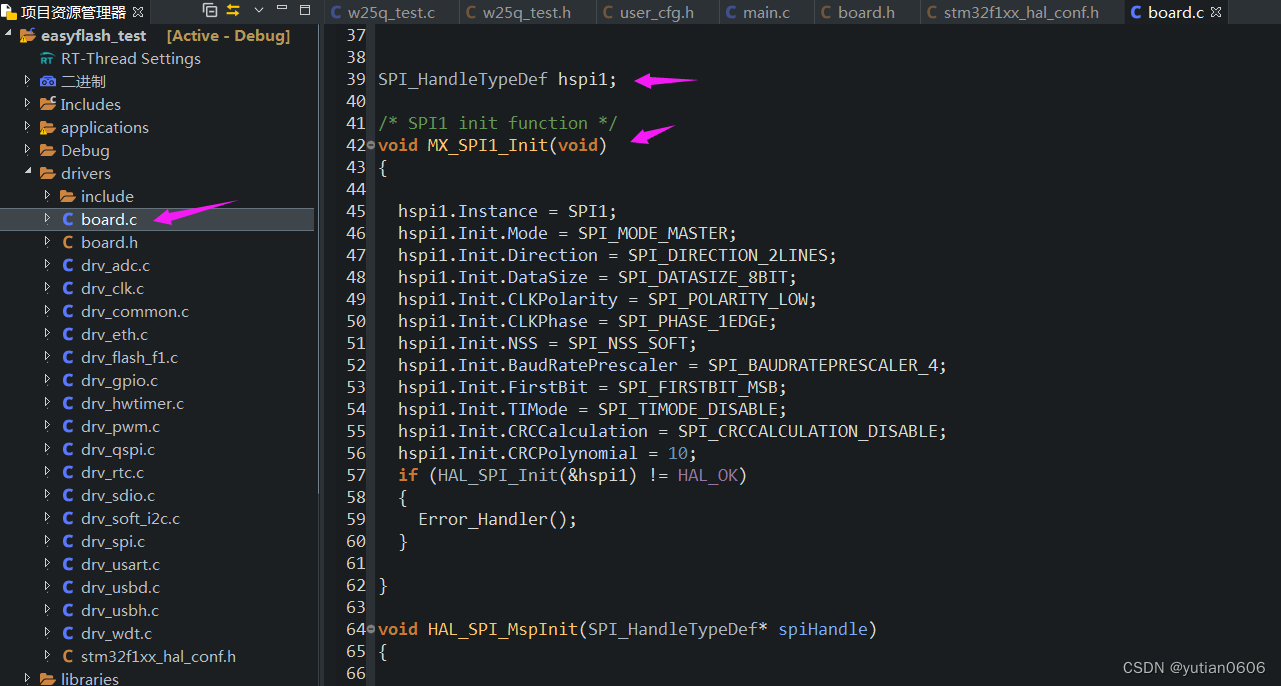
STEP 3:将由stm32cubemx生成的stm32xxxx_hal_msp.c的spi init函数复制到board.c文件的末尾,例如void HAL_SPI_MspInit(SPI_HandleTypeDef * hspi)
如下复制过程,将由stm32cubemx生成的 SPI 驱动部分代码全部复制到 board.c文件的末尾
3.stm32cubemx SPI 驱动生成过程
如何打开 stm32cubemx 建工程的过程就不讲解,直接讲关于SPI的配置过程
根据对应的STM32芯片打开一个工程配置SPI部分
时钟配置

时钟树配置

SPI接口设置

输出项目设置

代码生成器 设置

生成代码

打开文件夹
SPI.C文件夹内便是生成的关于SPI接口的配置驱动代码
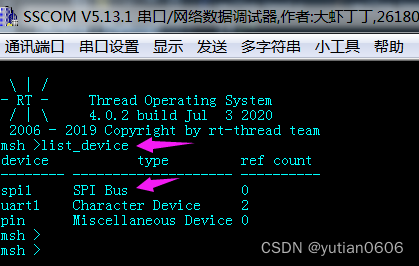
4.编译烧录后 发送命令 list_device 可以看到SPI总线 SPI1 已经注册到系统
5.SPI从设备驱动编写
SPI的总线设备已经注册完毕,接下来需要进行SPI从设备驱动编写,这里直接使用开发板板载的SPI Flash W25Q64进行测试,
新建 w25q_test.c
#include <rtthread.h>
#include <board.h>
#include <rtdevice.h>
#include "drv_spi.h"
#include "spi_flash_sfud.h"static int rt_hw_spi_flash_init(void)
{__HAL_RCC_GPIOB_CLK_ENABLE();rt_hw_spi_device_attach("spi1", "spi10", GPIOC, GPIO_PIN_0);// spi10 表示挂载在 spi3 总线上的 0 号设备,PC0是片选,这一步就可以将从设备挂在到总线中。if (RT_NULL == rt_sfud_flash_probe("W25Q64", "spi10")) //注册块设备,这一步可以将外部flash抽象为系统的块设备{return -RT_ERROR;};return RT_EOK;
}
/* 导出到自动初始化 */
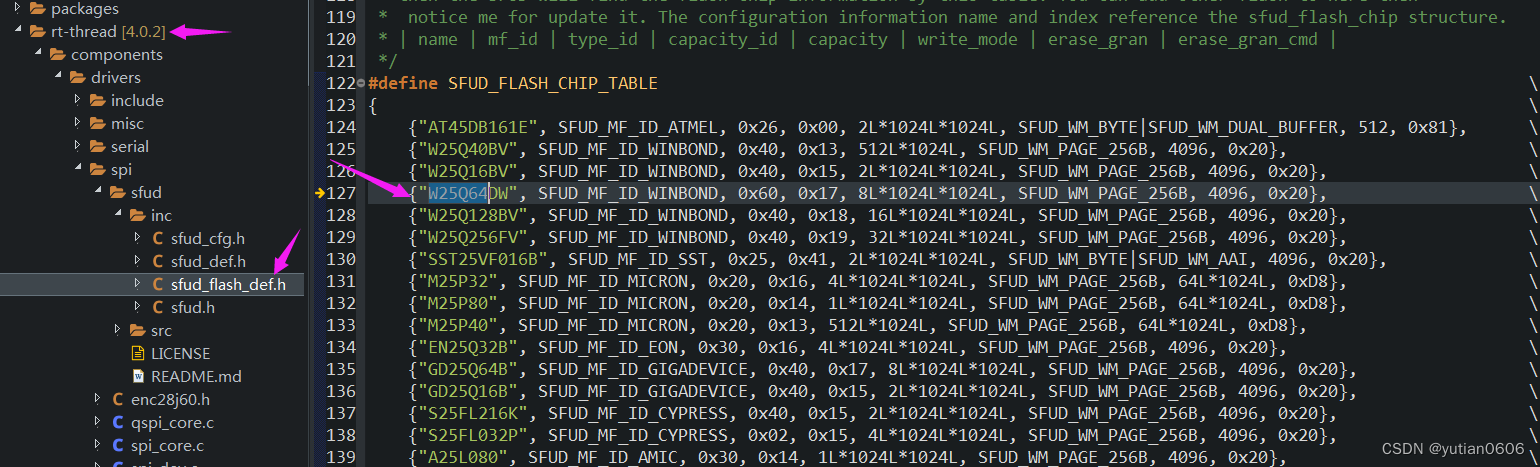
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_init);不支持 SFDP 标准的 Flash 已经在 Flash 参数信息表中定义,sfud_flash_def.h 文件有关于 flash 芯片的配置信息,配置中有的型号可以直接定义使用;配置中没有,且不支持SFDP的Flash 可以自己添加。
注意:上述代码中的 "W25Q64" 与下截图的型号无关,进过测试,将"W25Q64" 改为"W25Q664" 编译烧录后,串口打印的数据任然一样,打印信息是 SFUD 自动探测读出的 Flash 的信息。具体原理不清楚。
编译后烧录,串口会显示 FLASH 的注册信息
SFUD打印了 基本Flash参数表信息
\ | /
- RT - Thread Operating System/ | \ 4.0.2 build Jul 3 20202006 - 2019 Copyright by rt-thread team
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud.c:862) The flash device manufacturer ID is 0xEF, memory type ID is 0x40, capacity ID is 0x17.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:132) Check SFDP header is OK. The reversion is V1.5, NPN is 0.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:175) Check JEDEC basic flash parameter header is OK. The table id is 0, reversion is V1.5, length is 16, parameter table pointer is 0x000080.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:203) JEDEC basic flash parameter table info:
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:204) MSB-LSB 3 2 1 0
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0001] 0xFF 0xF9 0x20 0xE5
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0002] 0x03 0xFF 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0003] 0x6B 0x08 0xEB 0x44
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0004] 0xBB 0x42 0x3B 0x08
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0005] 0xFF 0xFF 0xFF 0xFE
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0006] 0x00 0x00 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0007] 0xEB 0x40 0xFF 0xFF
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0008] 0x52 0x0F 0x20 0x0C
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:207) [0009] 0x00 0x00 0xD8 0x10
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:215) 4 KB Erase is supported throughout the device. Command is 0x20.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:234) Write granularity is 64 bytes or larger.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:245) Target flash status register is non-volatile.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:271) 3-Byte only addressing.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:305) Capacity is 8388608 Bytes.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 4KB block erase. Command is 0x20.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 32KB block erase. Command is 0x52.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud_sfdp.c:312) Flash device supports 64KB block erase. Command is 0xD8.
[SFUD] Find a Winbond flash chip. Size is 8388608 bytes.
[SFUD] (../rt-thread/components/drivers/spi/sfud/src/sfud.c:840) Flash device reset success.
[SFUD] W25Q64 flash device is initialize success.
[SFUD] Probe SPI flash W25Q64 by SPI device spi10 success.
msh >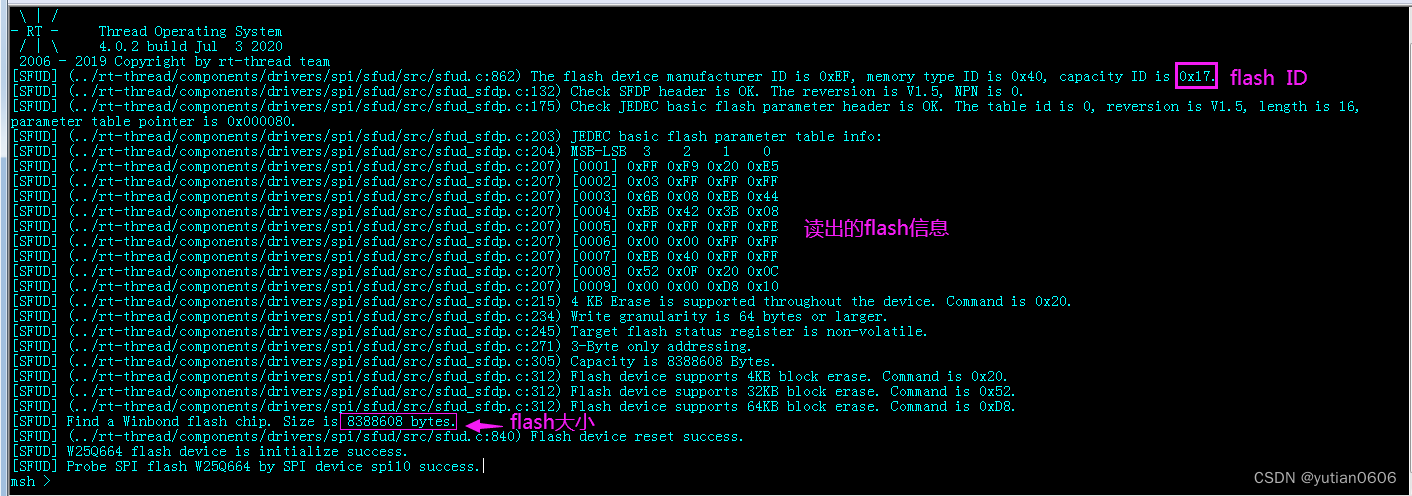
6.SFUD命令介绍
通过串口发送 sf 命令,可以查到关于 SFUD 系统的命令,可以通过命令对Flash进行读写、擦除等操作。
msh >sf
Usage:
sf probe [spi_device] - probe and init SPI flash by given 'spi_device'
sf read addr size - read 'size' bytes starting at 'addr'
sf write addr data1 ... dataN - write some bytes 'data' to flash starting at 'addr'
sf erase addr size - erase 'size' bytes starting at 'addr'
sf status [<volatile> <status>] - read or write '1:volatile|0:non-volatile' 'status'
sf bench - full chip benchmark. DANGER: It will erase full chip!sf probe [spi_device] - 探测命令:使用如 sf probe spi10 ,就能探测到挂载的spi10设备
sf read addr size - 读flash:使用如 sf read 00 100 ,表示从地址00开始读100个字节
sf write addr data1 ... dataN - 写flash:使用如 sf write 17 01 02 03 04 05 06 07 08 09 10 11 ,表示从17地址开始写入后面这些数据
sf erase addr size - 擦除命令:
sf status [<volatile> <status>] - 查询状态:查询状态寄存器的值- 全芯片基准测试。 危险:它将擦除整个芯片!7.SFUD 测试程序
#include "user_cfg.h"/*
W25Q128介绍
W25Q128是华邦公司推出的大容量SPI FLASH产品,W25Q128的容量为128M bit,该系列还有W25Q80/16/32/64等。
W25Q128将16M的容量分为256个块(Block),每个块大小为64K字节,每个块又分为16个扇区(Sector),每个扇区4K个字节。
W25Q128的最小擦除单位为一个扇区,也就是每次必须擦除4K个字节。这样我们需要给W25Q128开辟一个至少4K的缓存区,这样对SRAM要求比较高,要求芯片必须有4K以上SRAM才能很好的操作。
W25Q128的擦写周期多达10W次,具有20年的数据保存期限,支持电压为2.7~3.6V,
W25Q128支持标准的SPI,还支持双输出/四输出的SPI,最大SPI时钟可以到80Mhz(双输出时相当于160Mhz,四输出时相当于320M),更多的W25Q128的介绍,请参考W25Q128的DATASHEET。*//* SPI Flash 驱动 */
static int rt_hw_spi_flash_init(void)
{//__HAL_RCC_GPIOB_CLK_ENABLE();/* 往总线 spi1 上挂载一个 spi10 从设备 */rt_hw_spi_device_attach("spi1", "spi10", GPIOA, GPIO_PIN_4);/*spi10 表示挂载在 spi3 总线上的 0 号设备,PC0是片选,这一步就可以将从设备挂在到总线中。*//* 使用 SFUD 探测 spi10 从设备,并将 spi10 连接的 flash 初始化为块设备,名称 W25Q64DW */if (RT_NULL == rt_sfud_flash_probe("W25Q128JV", "spi10")) /* 注册块设备,这一步可以将外部flash抽象为系统的块设备*/{return -RT_ERROR;};return RT_EOK;
}
/* 导出到自动初始化 */
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_init);void W25Q_Flash_test(void)
{sfud_err result;uint8_t *read_data; // 读取到的数据uint8_t *write_data; // 将要写入的数据sfud_flash *sfud_dev = NULL;sfud_dev = rt_sfud_flash_find("spi10"); // 获取 sfud_dev// 或者 sfud_dev = rt_sfud_flash_find_by_dev_name("W25Q128");/*擦除 Flash 数据;flash: Flash 设备对象;addr:起始地址;size:从起始地址开始擦除数据的总大小*/sfud_erase(sfud_dev, 0, 1024); // 擦除从 0 开始的 4096 字节write_data = rt_malloc(4096); // 内存申请,函数会从系统堆空间中找到合适大小的内存块,然后把内存块可用地址返回给用户。rt_memset(write_data, 1, 4096); // 作用是在一段内存块中填充某个给定的值,将 write_data 32 个地址填入1/*往 Flash 写数据:flash:Flash 设备对象;addr:起始地址;size:从起始地址开始写入数据的总大小;data:待写入的数据*/sfud_write(sfud_dev, 0, 4096, write_data); // 将数据 32 字节的 write_data 从 0 开始写入 flashread_data = rt_malloc(4096);rt_memset(read_data, 0, 4096);for (uint16_t var = 0; var < 4096; ++var){rt_kprintf("var = %d ,data = %d \n",var,read_data[var]) ;}/*读取 Flash 数据; flash: Flash 设备对象 ;addr: 起始地址;size:从起始地址开始读取数据的总大小;data:读取到的数据*/sfud_read(sfud_dev, 0, 4096, read_data); // 读取从 0 开始的 32 字节,存入 read_datafor (uint16_t var = 0; var < 4096; ++var){rt_kprintf("var = %d ,data = %d \n",var,read_data[var]) ;}
}相关文章:
RT-Thread:SPI万能驱动 SFUD 驱动Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动
关键词:SFUD,FLASH,W25Q64,W25Q128,STM32F407 说明:RT-Thread 系统 使用 SPI万能驱动 SFUD 驱动 Flash W25Q64,通过 STM32CubeMX 配置 STM32 SPI 驱动。 提示:SFUD添加后的存储位置 1.打开RT-Thread Sett…...
Python学习笔记-使用Anaconda+VSCode配置开发环境
文章目录 概述一、安装Anaconda1.1 下载软件1.2 安装anaconda1.3 配置环境 二、配置虚拟环境2.1 使用conda创建一个新的虚拟环境2.1.1 使用search指令查看支持的python的版本:2.1.2 使用create创建指定版本的虚拟环境:2.1.3 使用env list查看虚拟环境列表…...

RabbitMQ的关键概念解析
RabbitMQ 是一个广泛使用的开源消息代理,它允许应用程序通过复杂的路由和存储机制来交换数据。理解 RabbitMQ 的核心概念对于有效地使用它至关重要。以下是 RabbitMQ 的一些关键概念及其工作流程: 关键概念 生产者(Producer) 生产…...

Python快速排序
快速排序是一种常用的排序算法,它通过递归地将数组分割成较小的子数组,然后对这些子数组进行排序,最终将它们合并成一个有序的数组。具体步骤如下: 1. 选择一个基准元素,通常是数组中的第一个元素。 2. 将数组分成两部…...
SpringBoot整合人大金仓数据库KingBase
1 去KingBase官网下载驱动jar包 2 将解压得到的所有jar包放置在libs目录下(没有就新建一个目录) 3 在pom文件添加相关依赖 <!--添加KingBase所需要的依赖--> <dependency><groupId>com.kingbase</groupId><artifactId>kin…...

Phoenix基本使用
1、Phoenix简介 1.1 Phoenix定义 Phoenix是HBase的开源SQL皮肤。可以使用标准JDBC API代替HBase客户端API来创建表,插入数据和查询HBase数据。 1.2 Phoenix特点 容易集成:如Spark,Hive,Pig,Flume和Map Reduce。性能…...

31-35.玩转Linux操作系统
玩转Linux操作系统 说明:本文中对Linux命令的讲解都是基于名为CentOS的Linux发行版本,我自己使用的是阿里云服务器,系统版本为CentOS Linux release 7.6.1810。不同的Linux发行版本在Shell命令和工具程序上会有一些差别,但是这些差…...
windows下载官方正版notepad++
一、前言 notepad是一款非常好用的编辑器,简洁、快速、高效。可是很多时候我们想去官网下载时,百度出来的都是一堆第三方下载地址,捆绑流氓软件,要么就是付费,作为一款优秀开源软件,我们必须要知道正确的下…...

Jmeter+ant+jenkins持续集成
一、环境准备 1、 jdk环境 要求JDK1.8以上,命令行输入:java -version,出现如下提示说明安装成功。 2、 Jmeter环境 下载Jmeter最新版本,解压即可,添加bin目录到环境变量。 3、 Ant环境 设置ant环境变量࿰…...

利用邮件发送附件来实现一键巡检,附件是通过调用zabbix api生成的word和Excel
HTML部分: <!DOCTYPE html> <html> <head><title>自动巡检</title><!-- 加入CSS样式 --> </head> <body><form id"inspectionForm"><label for"email">邮箱地址:</label>&…...

Linux 常用指令汇总
Linux 常用指令汇总 文章目录 Linux 常用指令汇总[toc]前言一、文件目录指令pwd 指令ls 指令cd 指令mkdir 指令rmdir 指令tree 指令cp 指令rm 指令mv 指令cat 指令more 指令less 指令head 指令tail 指令echo 指令> 指令>> 指令 二、时间日期指令date 指令cal 指令 三、…...
)
SpringBoot 注解超全详解(整合超详细版本)
使用注解的优势: 采用纯java代码,不在需要配置繁杂的xml文件 在配置中也可享受面向对象带来的好处 类型安全对重构可以提供良好的支持 减少复杂配置文件的同时亦能享受到springIoC容器提供的功能 1注解详解(配备了完善的释义)…...
Redis:原理速成+项目实战——Redis实战9(秒杀优化)
👨🎓作者简介:一位大四、研0学生,正在努力准备大四暑假的实习 🌌上期文章:Redis:原理速成项目实战——Redis实战8(基于Redis的分布式锁及优化) 📚订阅专栏&…...
【I2多语言】多语言快速上手
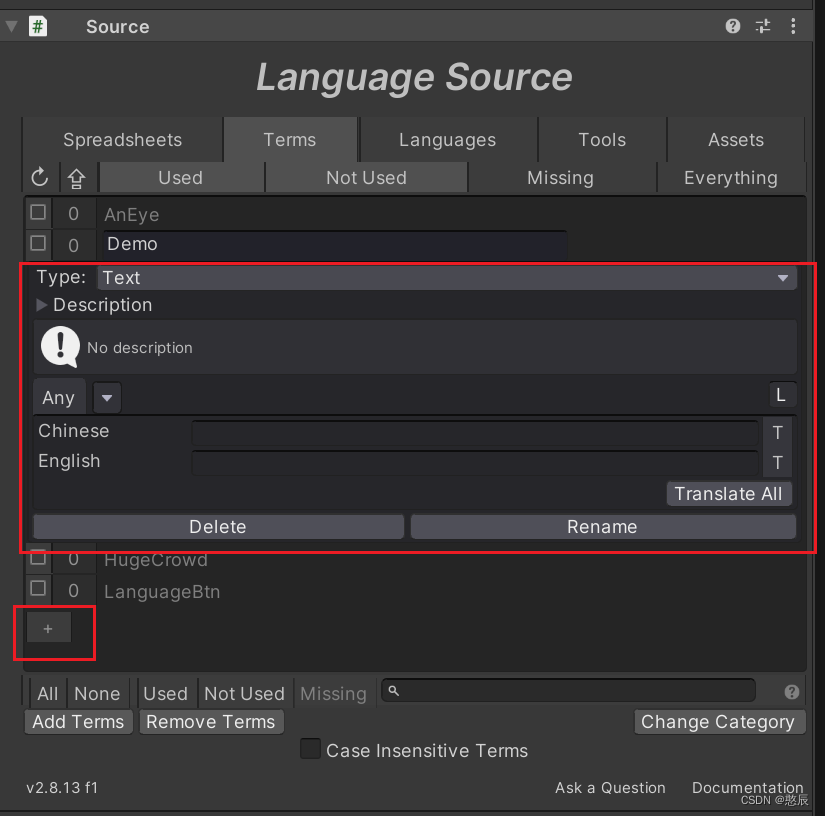
简介 官方API:http://www.inter-illusion.com/assets/I2LocalizationManual/I2LocalizationManual.html意义:更改游戏语言(多语言支持) 快速上手 插件安装: 直接拖拽进Unity即可 创建语言源(Creating a …...
【野火i.MX6ULL开发板】开发板连接网络(WiFi)与 SSH 登录、上电自动登录、设置静态IP、板子默认参数
0、前言 参考之前自己写的: http://t.csdnimg.cn/g60P8 参考资料: [野火]《Linux基础与应用开发实战指南——基于i.MX6ULL开发板》_20230323 从野火官网下载 参考博客: http://t.csdnimg.cn/8uh4O 参考官方文档: https://doc.…...

【数据库原理】(10)数据定义功能
SQL 数据定义功能包括定义模式、定义表、定义索引和定义视图,其语句如表所示。 一.创建、删除模式 1.创建模式 (Create Schema) 用途:创建模式是为了在数据库中定义一个新的命名空间,它可以包含多个数据库对象。 语法: CREATE SCHEMA &…...
: The TLS connection was non-properly terminated.)
GnuTLS recv error (-110): The TLS connection was non-properly terminated.
bug 解决方案:参考 GnuTLS recv error (-110): The TLS connection was non-properly terminated. 解决方案: apt-get install gnutls-bin git config --global http.sslVerify false git config --global http.postBuffer 1048576000参考...

hive sql 和 spark sql的区别
Hive SQL 和 Spark SQL 都是用于在大数据环境中处理结构化数据的工具,但它们有一些关键的区别: 底层计算引擎: Hive SQL:Hive 是建立在 Hadoop 生态系统之上的,使用 MapReduce 作为底层计算引擎。因此,它的…...

SparkStreaming基础解析(四)
1、 Spark Streaming概述 1.1 Spark Streaming是什么 Spark Streaming用于流式数据的处理。Spark Streaming支持的数据输入源很多,例如:Kafka、Flume、Twitter、ZeroMQ和简单的TCP套接字等等。数据输入后可以用Spark的高度抽象原语如:map、…...
HTML---JavaScript操作DOM对象
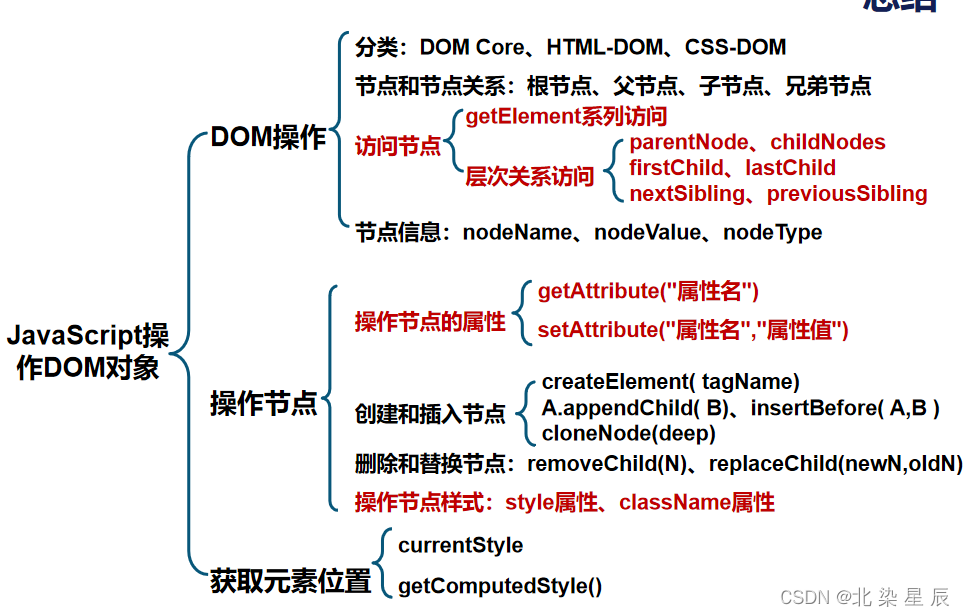
目录 文章目录 本章目标 一.DOM对象概念 二.节点访问方法 常用方法: 层次关系访问节点 三.节点信息 四.节点的操作方法 操作节点的属性 创建节点 删除替换节点 五.节点操作样式 style属性 class-name属性 六.获取元素位置 总结 本章目标 了解DOM的分类和节点间的…...

避开这5个坑,你的癫痫脑电AI模型准确率能翻倍:从数据标注到特征工程实战
避开这5个坑,你的癫痫脑电AI模型准确率能翻倍:从数据标注到特征工程实战 在医疗AI领域,癫痫脑电信号分析一直是个充满挑战的课题。许多开发者满怀信心地构建模型,却在验证阶段遭遇性能瓶颈——准确率停滞不前,误报率居…...

对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 体验 Taotoken 在模型切换上的便利性 在个人开发项目中接入大模型时,开发者通常面临一个选择&am…...

Applite:macOS软件管理的最佳图形化方案,告别繁琐命令行
Applite:macOS软件管理的最佳图形化方案,告别繁琐命令行 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为macOS软件安装更新而烦恼吗?…...

终极qmcdump指南:5分钟掌握QQ音乐加密格式解密技巧
终极qmcdump指南:5分钟掌握QQ音乐加密格式解密技巧 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump qmcdump是…...

可穿戴电子模块化连接方案:5mm微型按扣实现电路板与织物的可插拔连接
1. 项目概述与核心思路在折腾可穿戴电子项目时,最让人头疼的问题之一,就是如何让电路板与衣物既可靠连接,又能方便地拆下来。传统的做法要么是用导电胶带粘(不牢靠、易氧化),要么是直接把线焊死在板子上然后…...

品牌声音技能化:从模糊概念到可执行AI内容策略
1. 项目概述:品牌声音的“技能化”构建最近在和一些做品牌营销、内容运营的朋友聊天,发现一个挺普遍的现象:大家手里都有一堆品牌手册、VI规范,但一到具体执行,比如写一篇公众号推文、拍一条短视频,或者回复…...

AI编程助手安全规则实战:从SQL注入防御到团队安全基线构建
1. 项目概述:当AI编程助手遇上安全红线最近在GitHub上看到一个挺有意思的项目,叫“cursor-security-rules”。光看名字,你大概能猜到它和Cursor这个AI编程工具有关,而且重点是“安全规则”。没错,这个项目本质上是一个…...

药物发现自动化:FEP计算工作流引擎faah的设计原理与实战
1. 项目概述:一个面向药物发现的自动化工作流引擎 最近在药物研发的自动化工具领域,一个名为 kiron0/faah 的项目引起了我的注意。这并非一个简单的脚本集合,而是一个设计精巧、旨在为药物发现中的自由能微扰计算提供端到端自动化解决方案的…...

g1810,g3810,ip2700,g5080,g1800,ts3380,TS8380,ts6480报错5B00,P07,E08,5b02,1704,1700,5b04,佳能v6.200,亲测有用。
下载:点这里下载 备用下载:https://pan.baidu.com/s/1WrPFvdV8sq-qI3_NgO2EvA?pwd0000 常见型号如下: G系列 G1000、G1100、G1200、G1400、G1500、G1800、G1900、G1010、G1110、G1120、G1410、G1420、G1411、G1510、G1520、G1810、G1820、…...
)
用STM32+LoRa+阿里云IoT Studio,我DIY了一个低成本畜牧电子围栏(附完整代码)
基于STM32与LoRa的智能畜牧围栏系统开发实战 在广袤的牧区,牲畜走失一直是困扰牧民的核心问题。传统物理围栏不仅成本高昂,在草原这类开放地形中实施难度也很大。本文将详细介绍如何利用STM32微控制器、LoRa远距离通信模块和阿里云IoT Studio平台&#x…...