使用MMYOLO中yolov8训练自己VOC数据集实战
概述
MMYOLO是商汤公司基于PyTorch框架和YOLO系列算法开源的工具箱
- 目前支持的任务
- 目标检测
- 旋转框目标检测
- 支持的算法
- YOLOv5
- YOLOv6
- YOLOv7
- YOLOv8
- YOLOX
- RTMDet
- RTMDet-Rotated
- 支持的数据集
-
COCO Dataset
-
VOC Dataset
-
CrowdHuman Dataset
-
DOTA 1.0 Dataset
安装和验证
conda create -n mmyolo python=3.8 -y
conda activate mmyolo
# 如果你有 GPU
conda install pytorch torchvision -c pytorch
# 如果你是 CPU
# conda install pytorch torchvision cpuonly -c pytorchgit clone https://github.com/open-mmlab/mmyolo.git
cd mmyolo
pip install -U openmim
mim install -r requirements/mminstall.txt
# Install albumentations
mim install -r requirements/albu.txt
# Install MMYOLO
mim install -v -e .
# "-v" 指详细说明,或更多的输出
# "-e" 表示在可编辑模式下安装项目,因此对代码所做的任何本地修改都会生效,从而无需重新安装。请参考以下链接
link
一,数据集准备
1. voc 转labelme
虽然官方显示支持VOC格式的数据集,但是只找到由labelme转换yolo的的示例,因此我先将voc格式转yolo,
1.1 voc格式如下
VOCdevkit/VOC2007/Annotations/JPEGImages/
1.2转换后的格式如下
1.3 转换代码如下
'''
VOC格式转换为labelme的json格式
-------------------
VOCdevkit/VOC2007/Annotations/JPEGImages/
----------------
python voc_to_labelme.py
命令行参数解释:
--voc_dir VOC数据集目录,默认VOCdevkit/VOC2007
--labelme_version Labelme版本号,默认3.2.6
--labelme_shape Labelme标记框形状,支持rectangle或polygon,默认rectangle
--image_data Labelme的imageData节点是否输出数据,默认True
--out_dir Labelme格式数据集的输出目录
'''import argparse
import glob
import base64
import logging
import io
import os
import PIL
import PIL.Image
import xml.etree.ElementTree as ET
import json
import shutildef parse_opt(known=False):parser = argparse.ArgumentParser(description='xml2json')parser.add_argument('--voc_dir', default='/home/ai-developer/桌面/VOCdevkit/VOC2007', help='voc directory')parser.add_argument('--labelme_version', default='5.1.1', help='labelme version')parser.add_argument('--labelme_shape', default='rectangle', help='labelme shape')parser.add_argument('--image_data', default=True, type=bool, help='wether write image data to json')parser.add_argument('--out_dir', default='/home/ai-developer/桌面/labelme', help='the path of output directory')opt = parser.parse_args()return opt
def read_xml_gtbox_and_label(xml_path):tree = ET.parse(xml_path)root = tree.getroot()size = root.find('size')width = int(size.find('width').text)height = int(size.find('height').text)depth = int(size.find('depth').text)points = []for obj in root.iter('object'):cls = obj.find('name').textpose = obj.find('pose').textxmlbox = obj.find('bndbox')xmin = float(xmlbox.find('xmin').text)xmax = float(xmlbox.find('xmax').text)ymin = float(xmlbox.find('ymin').text)ymax = float(xmlbox.find('ymax').text)point = [cls, xmin, ymin, xmax, ymax]points.append(point)return points, width, heightdef voc_bndbox_to_labelme(opt):xml_dir = os.path.join(opt.voc_dir,'Annotations')img_dir = os.path.join(opt.voc_dir,'JPEGImages')if not os.path.exists(opt.out_dir):os.makedirs(opt.out_dir)xml_files = glob.glob(os.path.join(xml_dir,'*.xml'))for xml_file in xml_files:_, filename = os.path.split(xml_file)filename = filename.rstrip('.xml')# print('filename',filename)img_name = filename + '.jpg'img_path = os.path.join(img_dir, img_name)points, width, height = read_xml_gtbox_and_label(xml_file)json_str = {}json_str['version'] = opt.labelme_versionjson_str['flags'] = {}shapes = []for i in range(len(points)):cls, xmin, ymin, xmax, ymax = points[i]shape = {}shape['label'] = clsif opt.labelme_shape == 'rectangle':shape['points'] = [[xmin, ymin],[xmax, ymax]]else: #polygonshape['points'] = [[xmin, ymin],[xmax, ymin],[xmax, ymax],[xmin, ymax]]shape['group_id'] = None# shape['fill_color'] = Noneshape['shape_type'] = opt.labelme_shapeshape['flags'] = {}shapes.append(shape)json_str['imagePath'] = "../images/"+img_namejson_str['imageData'] = "null"json_str['imageHeight'] = heightjson_str['imageWidth'] = widthjson_str['shapes'] = shapestarget_path = os.path.join(opt.out_dir,img_name)shutil.copy(img_path, target_path)json_file = os.path.join(opt.out_dir, filename + '.json')with open(json_file, 'w') as f:json.dump(json_str, f, indent=2,ensure_ascii=False)def main(opt):voc_bndbox_to_labelme(opt)if __name__ == '__main__':opt = parse_opt()main(opt)
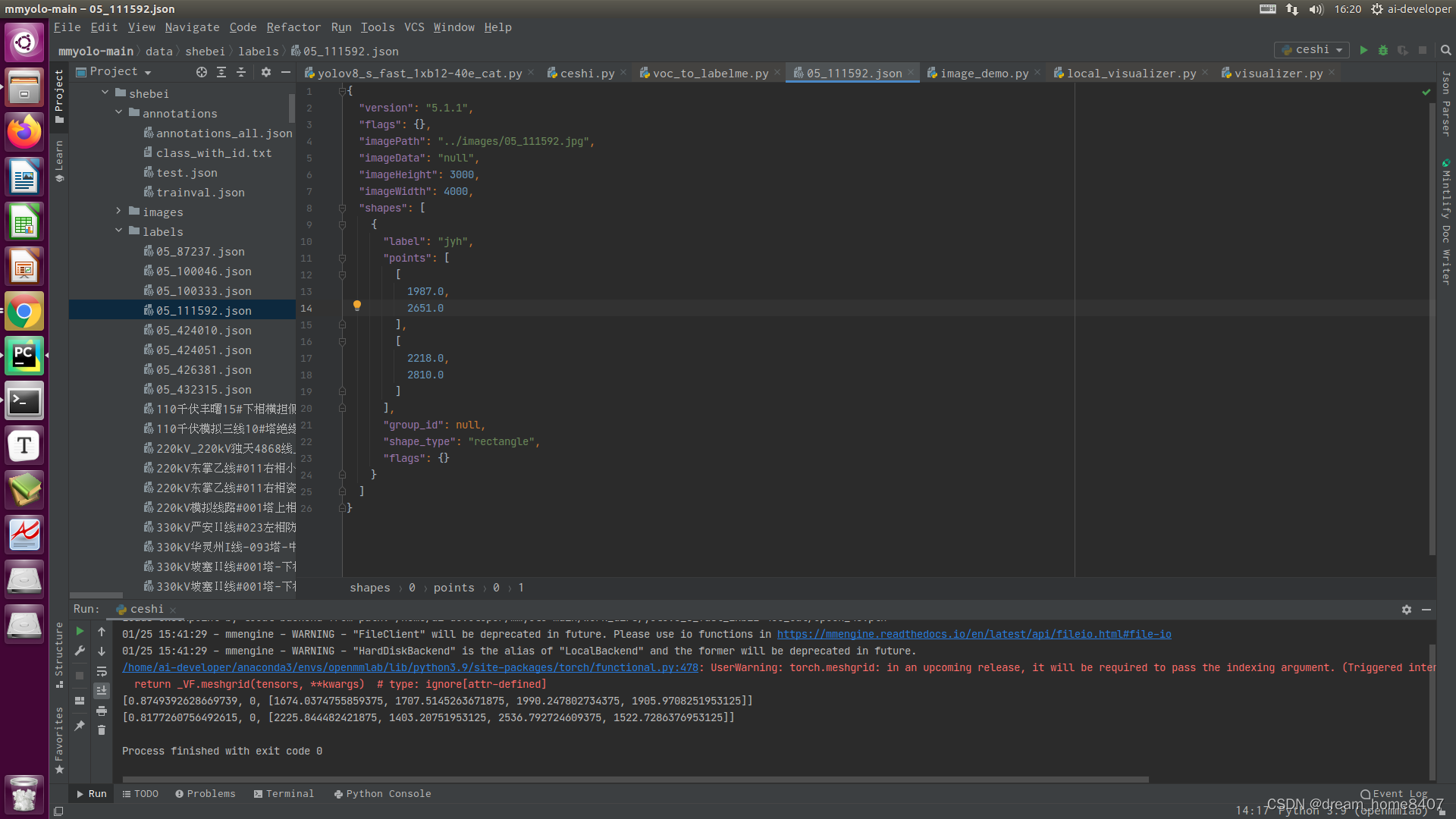
1.4.转换后的效果图
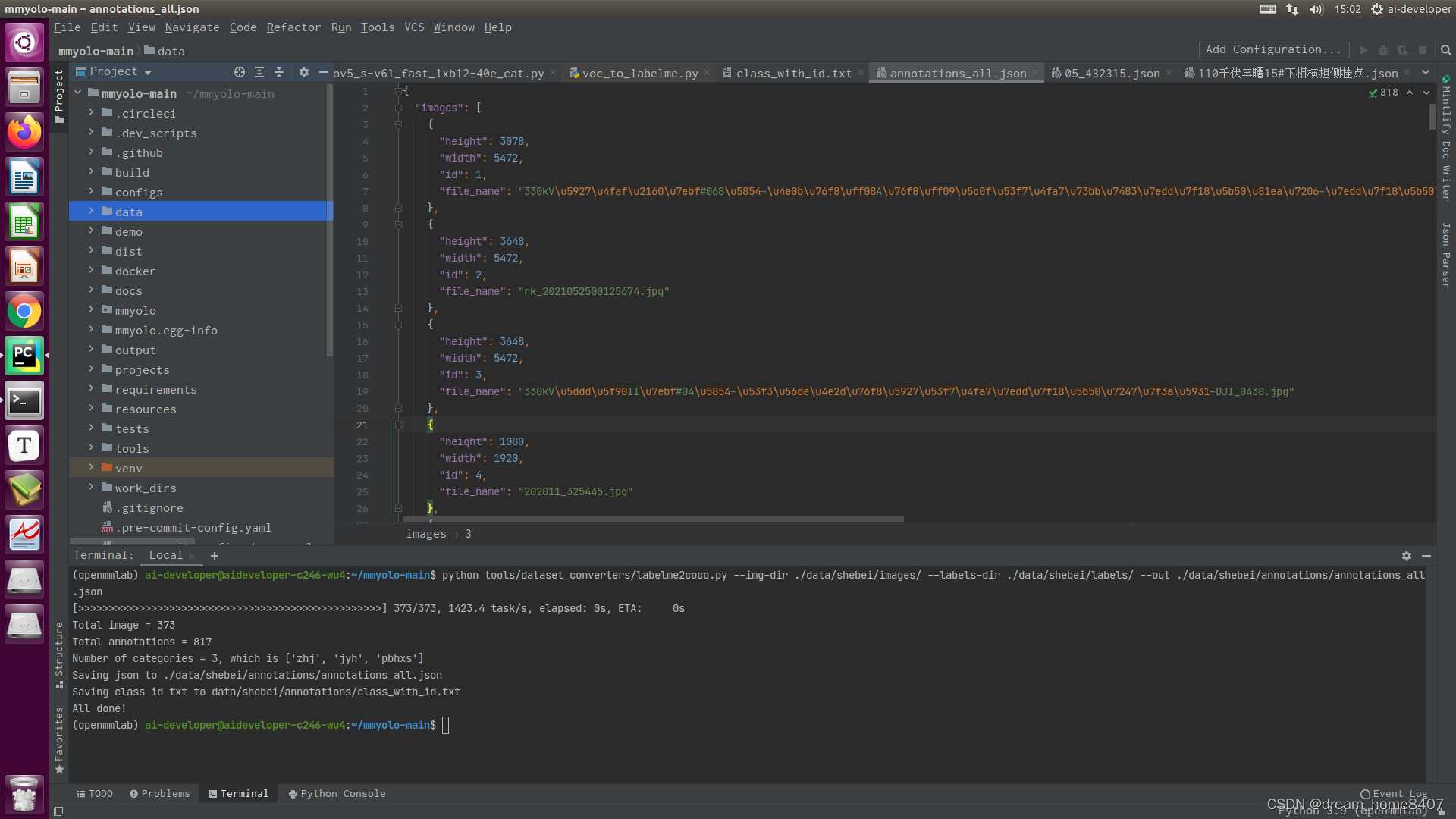
1.5,使用MMYOLO脚本将labelme的label转换为COCO的label:
python tools/dataset_converters/labelme2coco.py --img-dir ${图片文件夹路径} \--labels-dir ${label 文件夹位置} \--out ${输出 COCO label json 路径} \[--class-id-txt ${class_with_id.txt 路径}]
1.6 检查转换的 COCO labe
python tools/analysis_tools/browse_coco_json.py --img-dir ${图片文件夹路径} \--ann-file ${COCO label json 路径}1.7 数据集划分为训练集、验证集和测试集
python tools/misc/coco_split.py --json ${COCO label json 路径} \--out-dir ${划分 label json 保存根路径} \--ratios ${划分比例} \[--shuffle] \[--seed ${划分的随机种子}]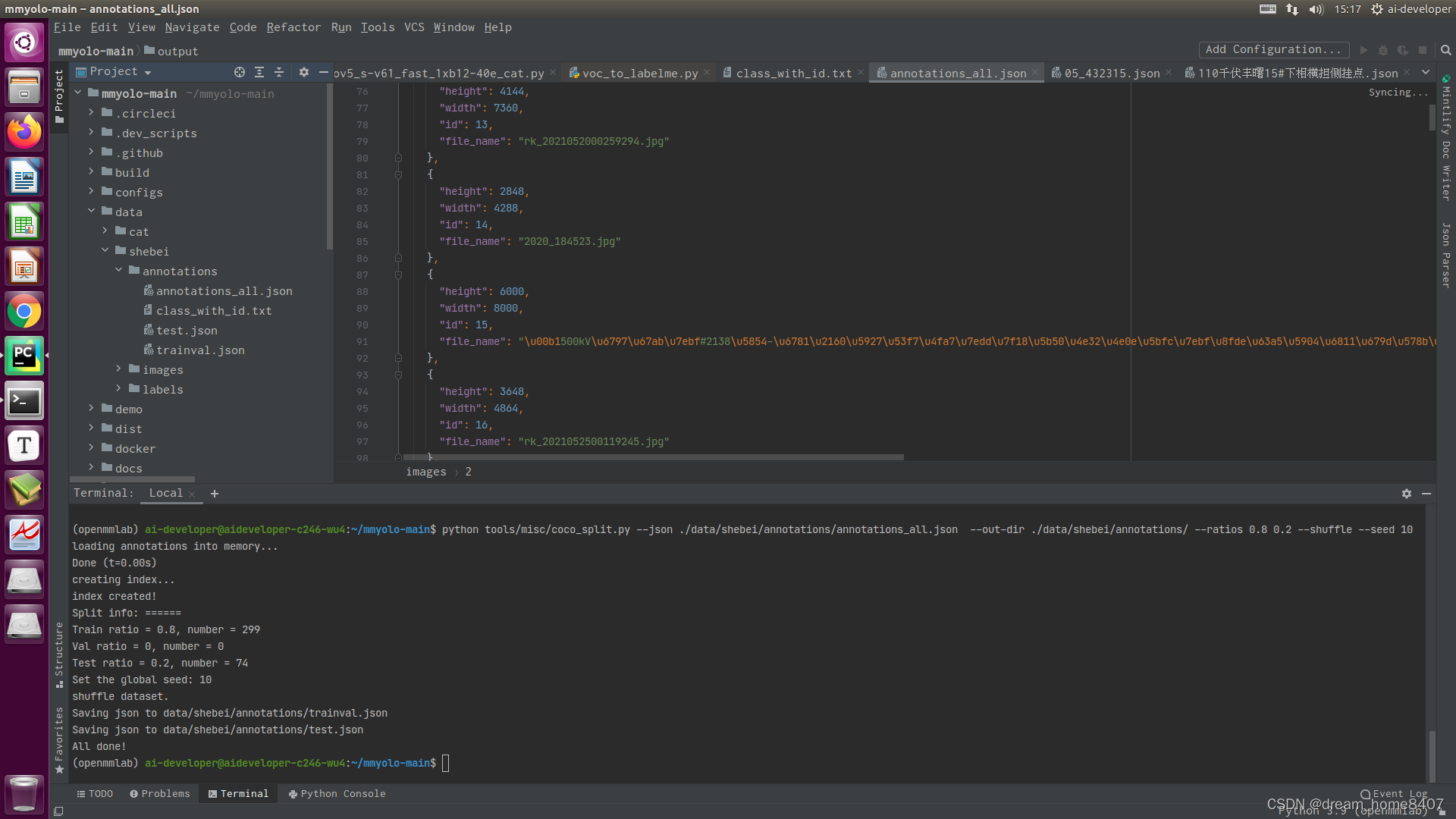
1.7 修改config文件
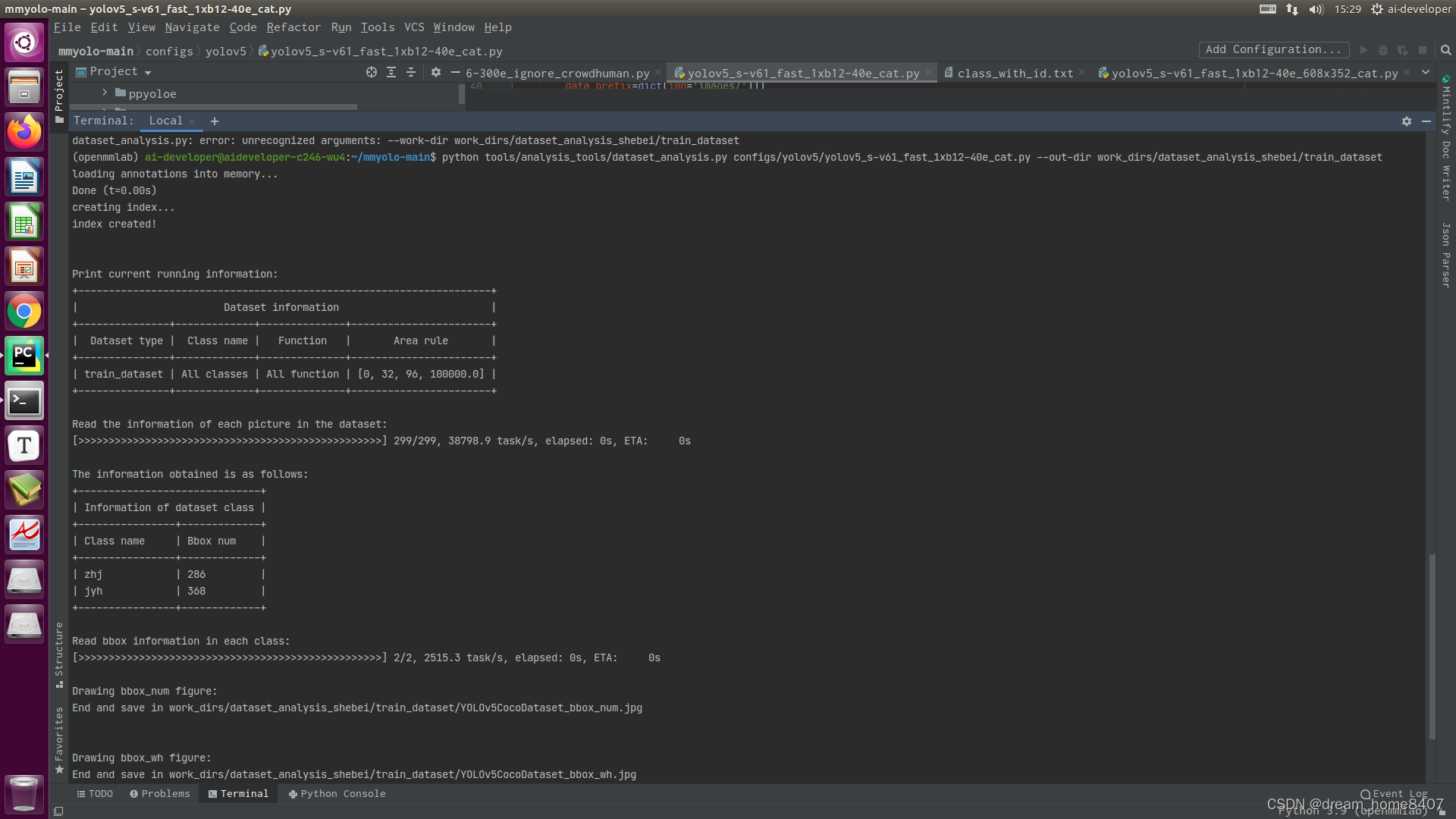
1.8 数据集可视化分析
python tools/analysis_tools/dataset_analysis.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \--out-dir work_dirs/dataset_analysis_cat/train_dataset
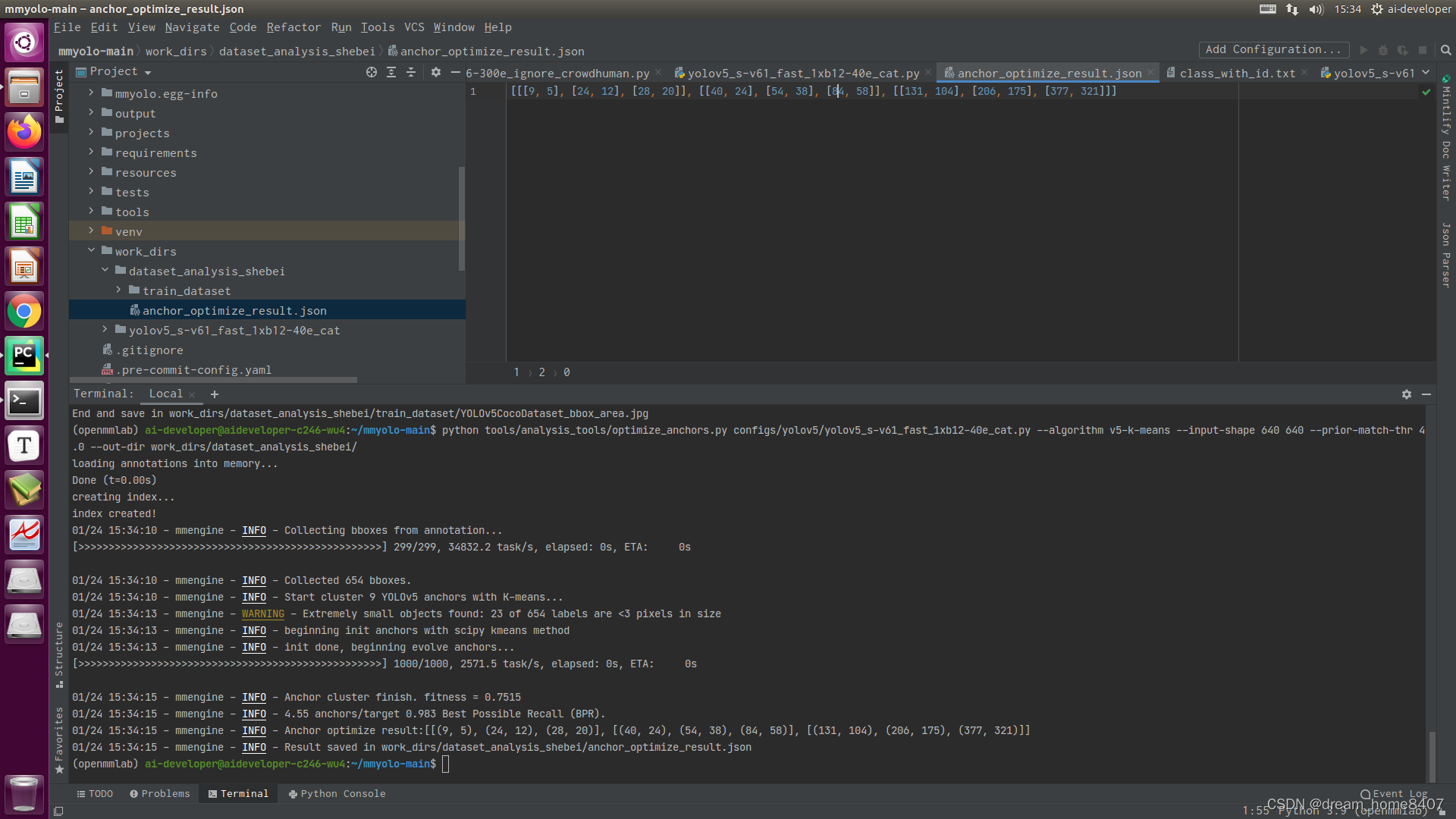
1.9 计算anchor
python tools/analysis_tools/optimize_anchors.py configs/custom_dataset/yolov5_s-v61_syncbn_fast_1xb32-100e_cat.py \--algorithm v5-k-means \--input-shape 640 640 \--prior-match-thr 4.0 \--out-dir work_dirs/dataset_analysis_cat
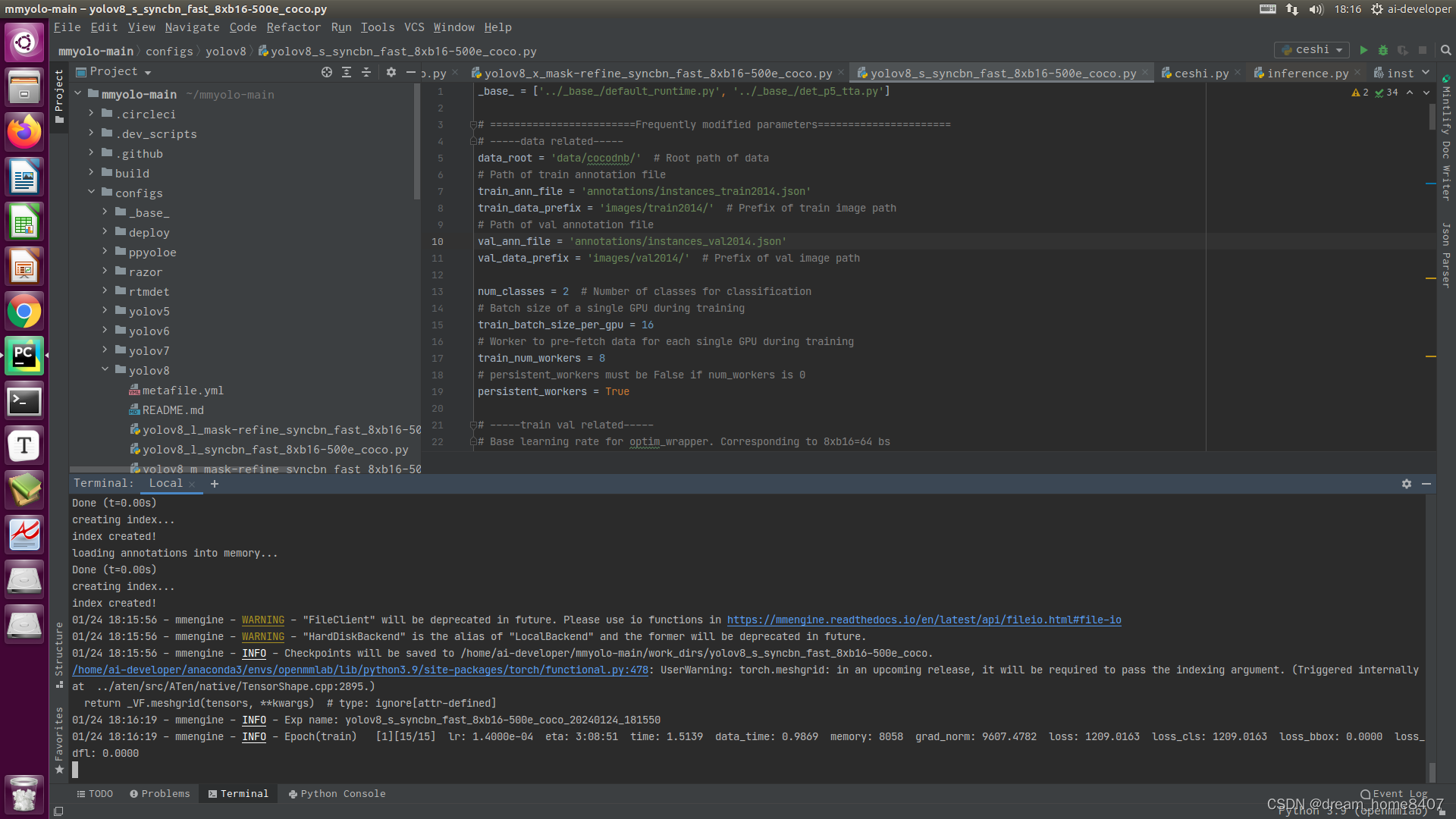
2.0 开始训练
2.1 推理
python demo/image_demo.py ./test_images/ ./work_dirs/yolov8_shebei/yolov8_s_fast_1xb12-40e_cat.py ./work_dirs/yolov8_shebei/epoch_80.pth --out-dir ./result/
或者
from mmdet.apis import init_detector, inference_detectorconfig_file = '/home/ai-developer/mmyolo-main/work_dirs/yolov8_s_fast_1xb12-40e_cat/yolov8_s_fast_1xb12-40e_cat.py'
checkpoint_file = '/home/ai-developer/mmyolo-main/work_dirs/yolov8_s_fast_1xb12-40e_cat/epoch_40.pth'
model = init_detector(config_file, checkpoint_file, device='cuda') # or device='cuda:0'
result=inference_detector(model, '/home/ai-developer/mmyolo-main/test_images/rk_2021052500119850.jpg')
pred_instances = result.pred_instances[result.pred_instances.scores >0.3]
# dataset_classes = model.dataset_meta.get('classes')
# print('dataset_classes:-----------------------',dataset_classes)
# print(pred_instances['scores'])
# print(pred_instances['labels'])
# print(pred_instances['bboxes'])for i in range(0,len(pred_instances['scores'])):result_list = []result_list.append(float(pred_instances['scores'][i]))result_list.append((pred_instances['labels'][i]).tolist())result_list.append((pred_instances['bboxes'][i]).tolist())print(result_list)
相关文章:
使用MMYOLO中yolov8训练自己VOC数据集实战
概述 MMYOLO是商汤公司基于PyTorch框架和YOLO系列算法开源的工具箱 - 目前支持的任务 目标检测旋转框目标检测 - 支持的算法 YOLOv5YOLOv6YOLOv7YOLOv8YOLOXRTMDetRTMDet-Rotated - 支持的数据集 COCO Dataset VOC Dataset CrowdHuman Dataset DOTA 1.0 Dataset 安装…...

解决方案 | 基于SFTP协议的文件传输断点续传Java实现方案
背景 因项目需要,我们服务每天都需要通过SFTP协议来对接上下游进行文件传输,但是对于一些大文件,在与第三方公司的服务器对接过程中很可能会因为网络问题或上下游服务器性能问题导致文件上传或者下载被中断,每次重试都需要重新对…...

web前端项目-动画特效【附源码】
文章目录 一:赛车游戏动画HTML源码:JS源码:CSS源码:(1)normalize.css(2)style.css 二:吉普车动画演示HTML源码:CSS源码:(1)…...
蓝桥杯备战——6.串口通讯
1.分析原理图 由上图我们可以看到串口1通过CH340接到了USB口上,通过串口1我们就能跟电脑进行数据交互。 另外需要注意的是STC15F是有两组高速串口的,而且可以切换端口。 2.配置串口 由于比赛时间紧,我们最好不要去现场查寄存器手册&#x…...
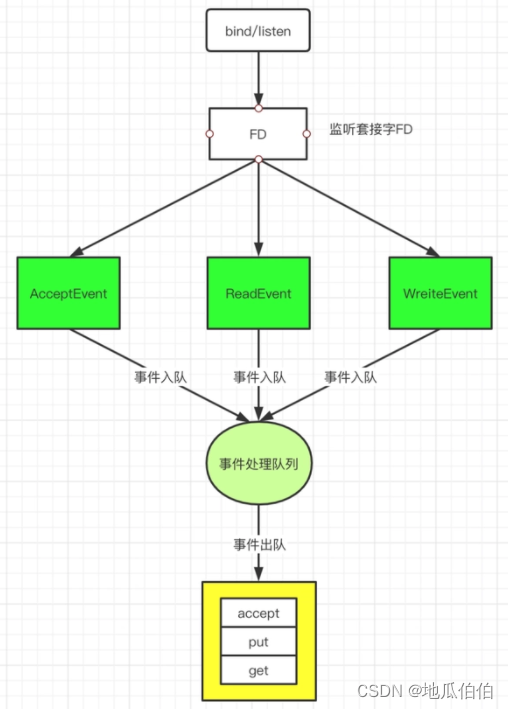
Redis为什么速度快:数据结构、存储及IO网络原理总结
Redis,作为内存数据结构存储的佼佼者,其高性能表现一直备受赞誉。那么,Redis究竟是如何实现这一点的呢?接下来,我们将更深入地探讨其背后的关键技术,并提供进一步的优化策略。 一、内存存储与数据结构设计…...
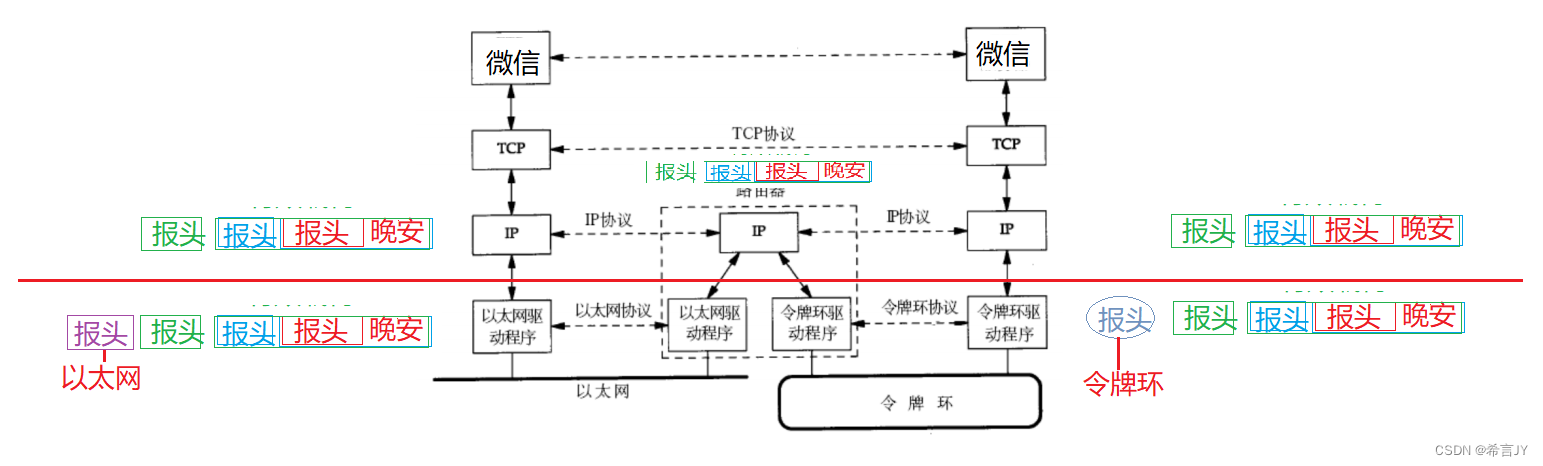
OSI七层模型 | TCP/IP模型 | 网络和操作系统的联系 | 网络通信的宏观流程
文章目录 1.OSI七层模型2.TCP/IP五层(或四层)模型3.网络通信的宏观流程3.1.同网段通信3.2.跨网段通信 1.OSI七层模型 在计算机通信诞生之初,不同的厂商都生产自己的设备,都有自己的网络通讯标准,导致了不同厂家之间各种协议不兼容࿰…...
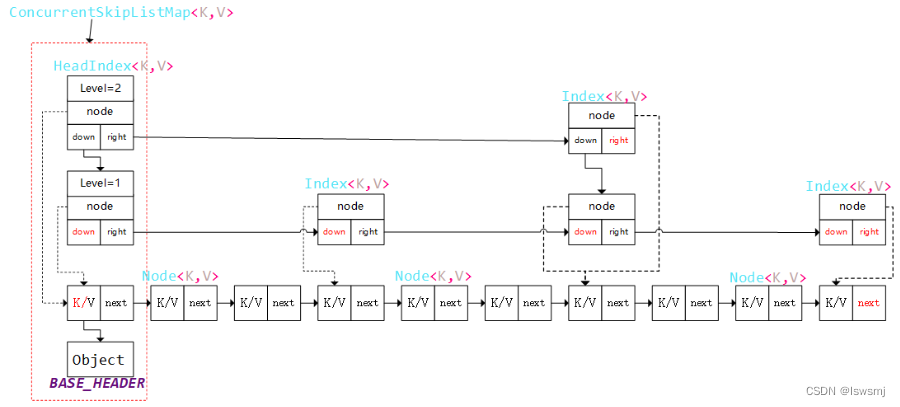
Java集合总览
1.总览 Java中的集合分List、Set、Queue、Map 4种类型。 List:大多数实现元素可以为null,可重复,底层是数组或链表的结构,支持动态扩容 Set:大多数实现元素可以为null但只能是1个,不能重复, …...
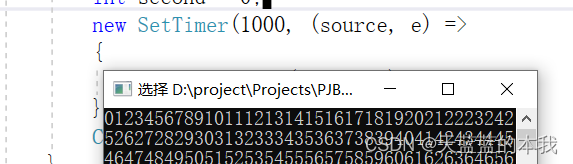
C# 设置一个定时器函数
C#中,创建设置一个定时器,能够定时中断执行特定操作,可以用于发送心跳、正计时和倒计时等。 本文对C#的定时器简单封装一下,哎,以方便定时器的创建。 定义 using Timer System.Timers.Timer;class SetTimer {Timer …...

第十四届蓝桥杯省赛pythonB组题。 管道
5407. 管道 - AcWing题库 有一根长度为 len的横向的管道,该管道按照单位长度分为 len 段,每一段的中央有一个可开关的阀门和一个检测水流的传感器。 一开始管道是空的,位于 Li 的阀门会在 Si 时刻打开,并不断让水流入管道。…...
淘宝扭蛋机小程序:新时代的互动营销与娱乐体验
随着科技的快速发展,小程序已经成为人们日常生活中不可或缺的一部分。在众多的小程序中,淘宝扭蛋机小程序以其独特的互动性和趣味性,吸引了大量用户。本文将深入探讨淘宝扭蛋机小程序的特色、用户体验以及未来发展。 一、淘宝扭蛋机小程序的…...
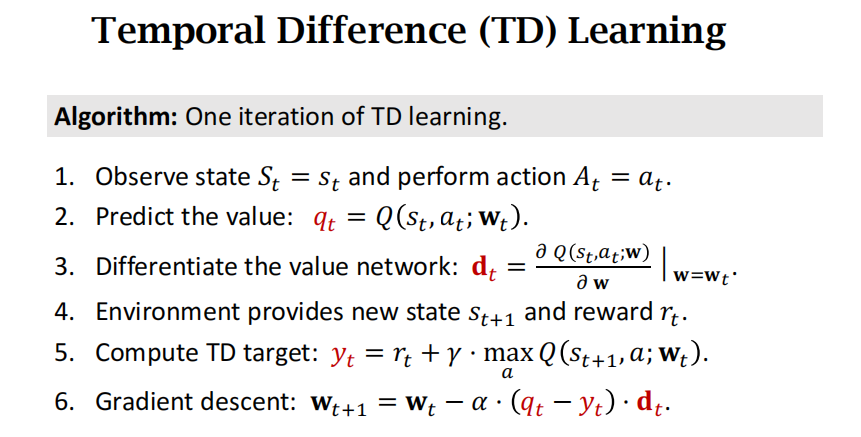
深度强化学习(王树森)笔记02
深度强化学习(DRL) 本文是学习笔记,如有侵权,请联系删除。本文在ChatGPT辅助下完成。 参考链接 Deep Reinforcement Learning官方链接:https://github.com/wangshusen/DRL 源代码链接:https://github.c…...
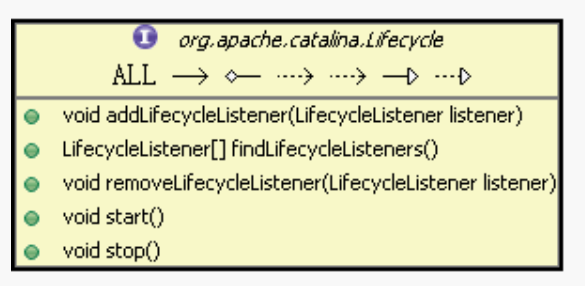
【分布式技术专题】「分布式技术架构」 探索Tomcat技术架构设计模式的奥秘(Server和Service组件原理分析)
探索Tomcat技术架构设计模式的奥秘 Tomcat系统架构分析Tomcat 整体结构Tomcat总体结构图以 Service 作为“婚姻”1) Service 接口方法列表 2) StandardService 的类结构图方法列表 3) StandardService. SetContainer4) StandardService. addConnector 以 Server 为“居”1) Ser…...

常用的gpt-4 prompt words收集8
本文介绍我最近收集的一些好用的chatgpt-4的prompts,如果你也有好用的提示词可以互相交流一下。 1. I ran into some trouble on my way to work. 迟到原因 2. In my heart, the most delicious coffee is the Hawaii Dirty from Manner. Only the Nong series a…...

【GitHub项目推荐--开源2D 游戏引擎】【转载】
microStudio 是一个可在浏览器中运行的游戏引擎,它拥有一套精美、设计精良、全面的工具,可以非常轻松地帮助你创建 2D 游戏。 你可以在浏览器中访问 microStudio.dev 开始搭建你的游戏,当然你可以克隆现有项目或创建新游戏并开始编码&#x…...

鸿蒙APP的应用场景
鸿蒙APP可以用于多种场合和设备类型,这是鸿蒙系统的分布式能力和多终端适配的优势。以下是一些鸿蒙APP的应用场景,希望对大家有所帮助。北京木奇移动技术有限公司,专业的软件外包开发公司,欢迎交流合作。 1.智能手机和平板电脑&am…...
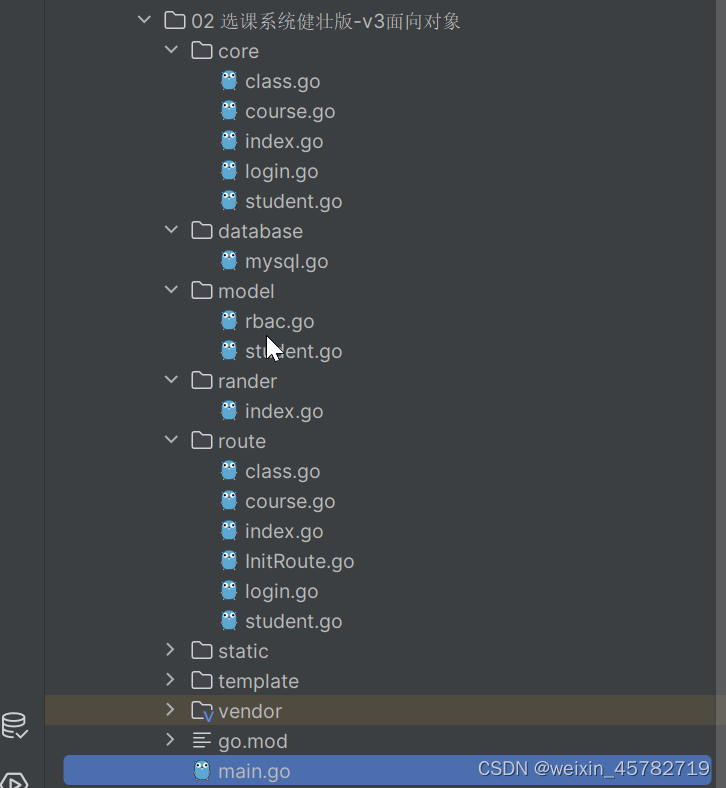
goland课程管理(6)
项目目录结构如下图所示: core包下面: class.go package coreimport "github.com/gin-gonic/gin"func Class1(ctx *gin.Context) {}course.go package coreimport (. "cookie/database". "cookie/model""fmt"…...
)
04.Elasticsearch应用(四)
Elasticsearch应用(四) 1.什么是索引 索引是文档的容器,是一类文档的结合索引是一个逻辑命名空间,它映射到一个或多个主分片,并且可以具有零个或多个副本分片索引中数据分散在Shard上索引的Mapping定义文档字段的类型…...
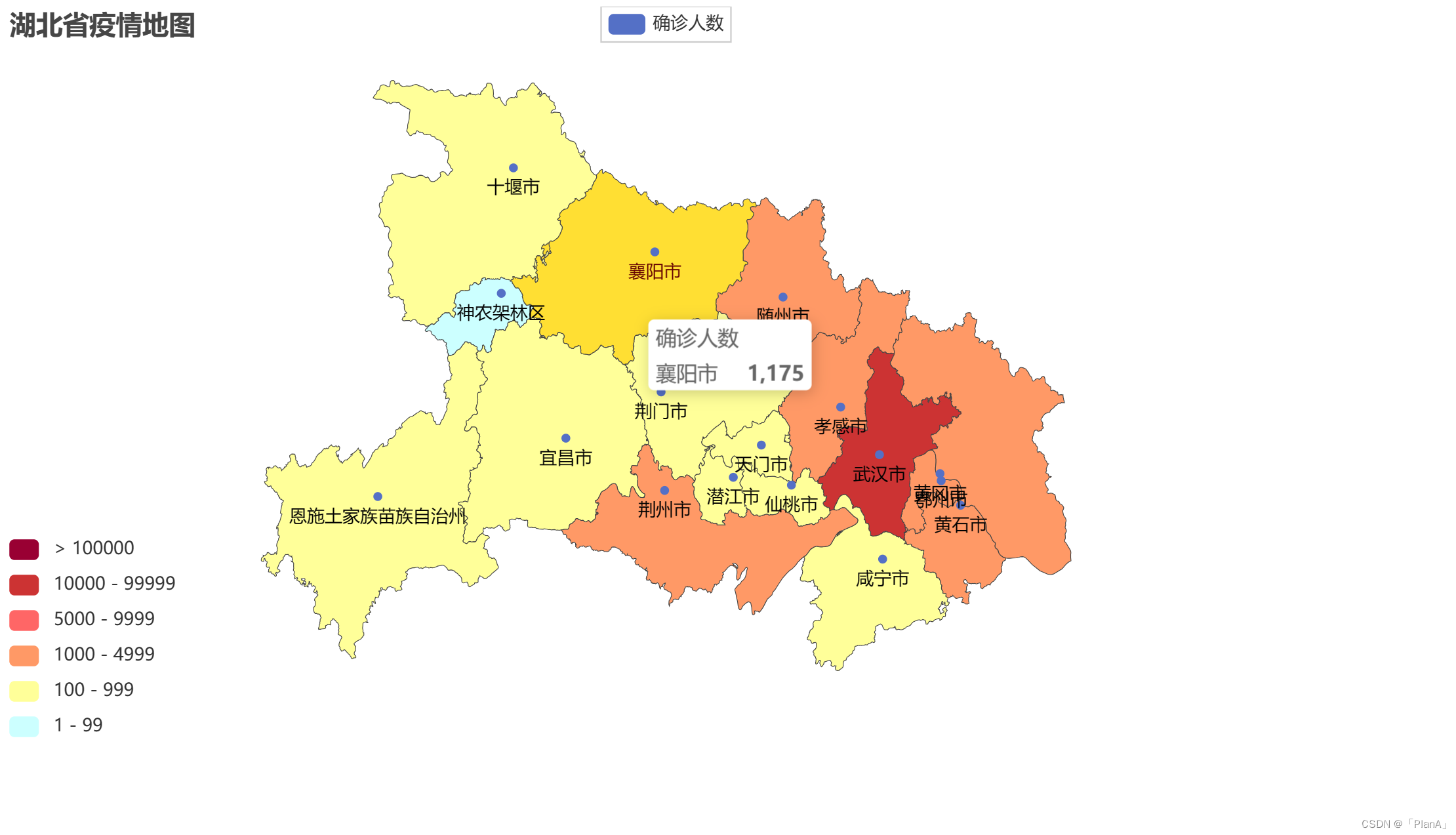
Python之数据可视化(地图)
目录 一 基础地图应用 二 全国疫情图 一 数据准备 二 数据处理 二 湖北省疫情图 一 数据准备 二 数据处理 一 基础地图应用 导入map地图对象 from pyecharts.charts import Map map Map() 写入数据 data [("北京市",100),("上海市"…...
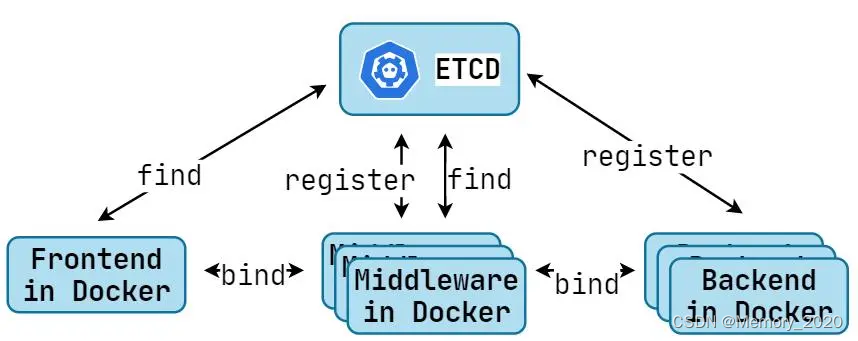
etcd技术解析:构建高可用分布式系统的利器
1. 引言 随着云原生技术的兴起,分布式系统的构建变得愈发重要。etcd作为一个高可用的分布式键值存储系统,在这个领域发挥着至关重要的作用。本文将深入探讨etcd的技术细节,以及如何利用它构建高可用的分布式系统。 2. etcd简介 etcd是一个开…...

Pillow图像处理:从零开始的奇妙之旅
图像处理,就像是一场神奇的冒险,让我们的照片变得更有趣、更生动。而在这个冒险的旅途中,Pillow就如同一位魔法师,为我们开启了无尽的可能性。无论你是刚刚踏入图像处理领域的小白,还是已经略有基础的程序员࿰…...

颠覆性创新:为什么Upkie开源轮式双足机器人正在重新定义机器人开发范式
颠覆性创新:为什么Upkie开源轮式双足机器人正在重新定义机器人开发范式 【免费下载链接】upkie Open-source wheeled biped robots 项目地址: https://gitcode.com/gh_mirrors/up/upkie 在传统机器人设计面临轮式与足式两难选择的今天,一个革命性…...
)
用Keras和MNIST数据集,5分钟搞定一个图像去噪的CNN自编码器(附完整代码)
5分钟实战:用Keras构建图像去噪自编码器的极简指南 当一张布满噪点的老照片在AI处理后重现清晰画面时,这种"数字魔法"背后往往是自编码器在发挥作用。作为深度学习领域的瑞士军刀,自编码器不仅能用于图像去噪,还在数据压…...

低温预警!固化慢、易开裂……密封胶冬季施工手册
低温预警!固化慢、易开裂……密封胶冬季施工手册 硅酮耐候密封胶主要作用是保障幕墙的气密性、水密性。其出现问题,可能会导致耐候密封失效,从而造成幕墙漏水漏气,影响幕墙的正常使用。耐候密封胶由于考虑到现场施工,几乎都是单组分硅酮密封胶产品。进入冬季,气候变化明…...

如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南
如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Epic Games或GOG平台无法访问Steam创意工坊而烦恼…...

多模态AI实战:基于OpenGVLab/Ask-Anything构建视觉问答系统
1. 项目概述:当视觉大模型学会“看图说话”最近在折腾多模态AI应用,发现了一个挺有意思的开源项目,叫OpenGVLab/Ask-Anything。简单来说,它就像一个给AI装上了“眼睛”和“嘴巴”的系统,你给它一张图片或一段视频&…...

猫抓扩展完整指南:三步掌握浏览器视频嗅探与下载技巧
猫抓扩展完整指南:三步掌握浏览器视频嗅探与下载技巧 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓(Cat-Catch&#…...

如何免费高效优化电脑性能:UXTU终极调优指南
如何免费高效优化电脑性能:UXTU终极调优指南 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility Universal x86 Tuning…...

开源技能图谱工具SkillPort:Go语言构建的知识管理利器
1. 项目概述:一个技能图谱与知识管理的开源利器 最近在整理个人技术栈和团队知识库时,我一直在寻找一个能直观展示技能关联、又能深度管理学习路径的工具。市面上的笔记软件要么太“平”,只能线性记录;要么太“重”,像…...

基于MCP协议构建AI数据连接器:从原理到SQL查询服务器实践
1. 项目概述:一个连接AI与数据源的“翻译官”最近在折腾AI应用开发,特别是想让大语言模型(LLM)能直接、安全地访问我自己的数据库、API或者文件系统时,遇到了一个普遍难题:怎么让AI理解并操作这些外部数据源…...

3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题
3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾删除Mac应用后,发…...