智能汽车竞赛摄像头处理(3)——动态阈值二值化(大津法)
前言
(1)在上一节中,我们学习了对图像的固定二值化处理,可以将原始图像处理成二值化的黑白图像,这里面的本质就是将原来的二维数组进行了处理,处理后的二维数组里的元素都是0和255两个值。
(2)固定阈值二值化的使用是比赛过程中,每一处地方的二值化阈值都是同一个值,而赛道的不同地方以同一个阈值二值化出来的图像可能不合适,甚至不能正常循迹。
(3)为了适应赛道上的不同环境,很多同学会采用动态二值化,即对于采集到的不同图像,通过算法计算出合适的阈值来进行二值化处理,最后的二值化效果可能会比固定阈值化好一些(因为也有不少同学在比赛中采用固定阈值二值化处理,最后拿到了国奖,所以哪个方法更好,还真不好说,主要根据实际情况看自己的作品)。
(4)毋庸置疑,大津法会增加算法处理,处理时间肯定比固定阈值二值化长。
概念
对于图像处理入门,建议大家可以去看这篇文章
详解-OTUS(大津法-最大类间方差)原理及C语言代码实现-CSDN博客
但是,你不想看也没关系,请继续看我后面的内容,你只需要理解到一个点:大津法就是一个对二维数组处理后会得到一个值的算法,而这个值就是我们二值化要的阈值。想要搞清楚大津法原理,请移步上面的文章进行学习,我这里只进行简要介绍。
大津法
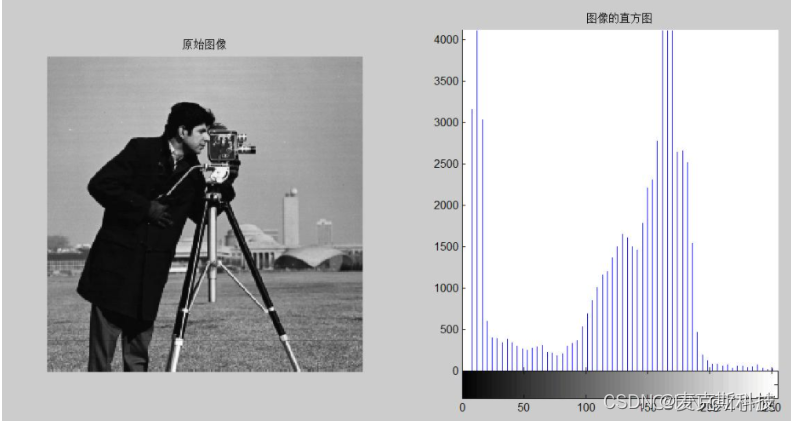
大津法阈值采用最大类间方差的原理,适合于图像灰度分布整体呈现“双峰”的情况。大津法会自动找出一个阈值,使得分割后的两部分类间方差最大。
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种确定图像二值化分割阈值的算法。算法假设图像像素能够根据全局阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大。
大津法阈值采用最大类间方差的原理,适合于图像灰度分布整体呈现“双峰”的情况。大津法会自动找出一个阈值,使得分割后的两部分类间方差最大。
特性:
- 大津法对噪音十分敏感,在处理之前应对图片进行去噪处理。如果图像有存在局部噪声,则会影响大津法的判断
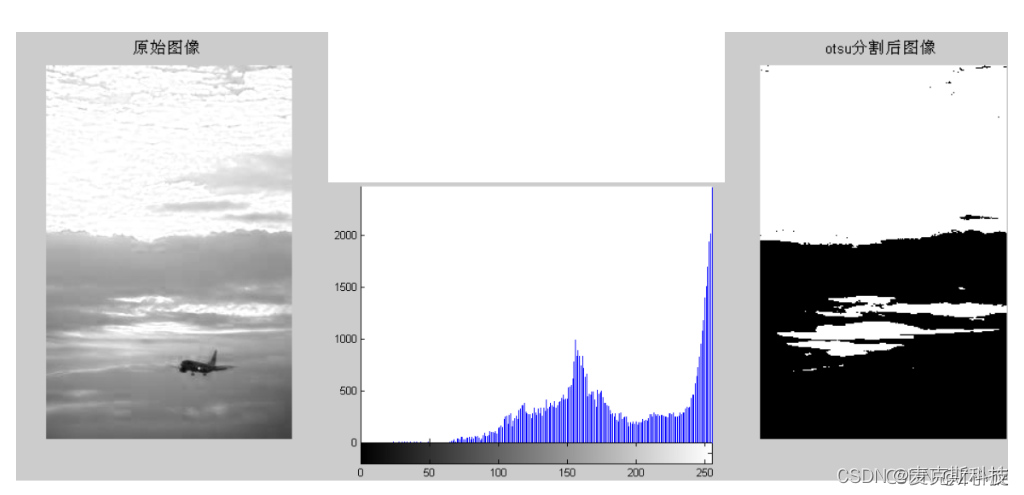
- 当目标与背景的面积比例悬殊的时候,类间方差函数可能呈现双峰或者多峰,这个时候 大津法的效果不好
(1)双峰图像,目标和背景面积差距不大,可以很好的判断,如下:
(2)当图像中的目标与背景的面积相差很大时,灰度直方图没有明显的双峰,或者两个峰的大小相差很大,分割效果不佳:
代码实现
一般大津法代码如下:
(你只需要将我的代码复制粘贴到images.c文件中,把这个函数在cpu1.c中调用即可)
images.c
#include "zf_common_headfile.h"uint8 mt9v03x_image_BandW[MT9V03X_H][MT9V03X_W];/*begin 大津法比赛 begin*/
//快速大津法二值化 pixelSum = width * height/4;
//-------------------------------------------------------------------------------------------------------------------
// @brief 快速大津
// @return uint8
// @since v1.1
// Sample usage: OTSU_Threshold = otsuThreshold(mt9v03x_image_dvp[0]);//大津法阈值
//-------------------------------------------------------------------------------------------------------------------
uint8 otsuThreshold_fast(uint8 *image) //注意计算阈值的一定要是原图像
{
#define GrayScale 256int Pixel_Max=0;int Pixel_Min=255;uint16 width = MT9V03X_W; //宽100uint16 height = MT9V03X_H; //高80int pixelCount[GrayScale]; //各像素GrayScale的个数pixelCount 一维数组float pixelPro[GrayScale]; //各像素GrayScale所占百分比pixelPro 一维数组int i, j, pixelSum = width * height/4; //pixelSum是获取总的图像像素个数的1/4,相应下面轮询时高和宽都是以2为单位自增uint8 threshold = 0;
// uint8 last_threshold = 0;uint8* data = image; //指向像素数据的指针//清零for (i = 0; i < GrayScale; i++){pixelCount[i] = 0;pixelPro[i] = 0;}uint32 gray_sum=0; //每次执行到这会将gray_sum清零//统计灰度级中每个像素在整幅图像中的个数for (i = 0; i < height; i+=2) //高{for (j = 0; j < width; j+=2) //宽{pixelCount[(int)data[i * width + j]]++; //将当前的点的像素值作为计数数组的下标gray_sum+=(int)data[i * width + j]; //灰度值总和if(data[i * width + j]>Pixel_Max) Pixel_Max=data[i * width + j];if(data[i * width + j]<Pixel_Min) Pixel_Min=data[i * width + j];}}//计算每个像素值的点在整幅图像中的比例for (i = Pixel_Min; i < Pixel_Max; i++){pixelPro[i] = (float)pixelCount[i] / pixelSum;}//遍历灰度级[0,255]float w0, w1, u0tmp, u1tmp, u0, u1, u, deltaTmp, deltaMax = 0;w0 = w1 = u0tmp = u1tmp = u0 = u1 = u = deltaTmp = 0;for (j = Pixel_Min; j < Pixel_Max; j++){w0 += pixelPro[j]; //背景部分每个灰度值的像素点所占比例之和 即背景部分的比例u0tmp += j * pixelPro[j]; //背景部分 每个灰度值的点的比例 *灰度值w1=1-w0;u1tmp=gray_sum/pixelSum-u0tmp;u0 = u0tmp / w0; //背景平均灰度u1 = u1tmp / w1; //前景平均灰度u = u0tmp + u1tmp; //全局平均灰度deltaTmp = (float)(w0 *w1* (u0 - u1)* (u0 - u1)) ;if (deltaTmp > deltaMax){deltaMax = deltaTmp;threshold = (uint8)j;}if (deltaTmp < deltaMax){break;}}return threshold;
}
/*end 大津法比赛 end*//*begin 大津法学习 begin*/
//------------------摄像头参数--------------//
uint8 image_threshold = 46; //图像阈值 0~255
uint8 dis_image[60][80];uint8 otsuThreshold(uint8 *image, uint16 width, uint16 height)
{#define GrayScale 256int pixelCount[GrayScale] = {0};//每个灰度值所占像素个数float pixelPro[GrayScale] = {0};//每个灰度值所占总像素比例int i,j;int Sumpix = width * height; //总像素点uint8 threshold = 0;uint8* data = image; //指向像素数据的指针//统计灰度级中每个像素在整幅图像中的个数for (i = 0; i < height; i++){for (j = 0; j < width; j++){pixelCount[(int)data[i * width + j]]++; //将像素值作为计数数组的下标// pixelCount[(int)image[i][j]]++; 若不用指针用这个}}float u = 0;for (i = 0; i < GrayScale; i++){pixelPro[i] = (float)pixelCount[i] / Sumpix; //计算每个像素在整幅图像中的比例u += i * pixelPro[i]; //总平均灰度}float maxVariance=0.0; //最大类间方差float w0 = 0, avgValue = 0; //w0 前景比例 ,avgValue 前景平均灰度for(i = 0; i < 256; i++) //每一次循环都是一次完整类间方差计算 (两个for叠加为1个){w0 += pixelPro[i]; //假设当前灰度i为阈值, 0~i 灰度像素所占整幅图像的比例即前景比例avgValue += i * pixelPro[i];float variance = pow((avgValue/w0 - u), 2) * w0 /(1 - w0); //类间方差if(variance > maxVariance){maxVariance = variance;threshold = (uint8)i;}}return threshold;
}/*end 大津法学习 end*///图像二值化
//0 - 255
//黑 - 白
void Set_image_towvalues(uint8 value)
{uint8 temp_valude;//暂存灰度值for(uint8 i = 0;i < MT9V03X_H;i++)//高{for(uint8 j = 0;j < MT9V03X_W;j++)//宽{temp_valude = mt9v03x_image[i][j];if(temp_valude < value){mt9v03x_image_BandW[i][j] = 0;//黑}else{mt9v03x_image_BandW[i][j] = 255;//白}}}
}images.h
#ifndef CODE_IMAGES_H_
#define CODE_IMAGES_H_extern uint8 mt9v03x_image_BandW[MT9V03X_H][MT9V03X_W];void Set_image_towvalues(uint8 value);
uint8 otsuThreshold(uint8 *image, uint16 width, uint16 height);
uint8 otsuThreshold_fast(uint8 *image);
#endif /* CODE_IMAGES_H_ */但是不优化大津法的代码,图像处理时间较长,所以大家又将“大津法”优化成了“快速大津法”,代码也在上面公布了,照我如下调用即可。
cpu1.c
void core1_main(void)
{disable_Watchdog(); // 关闭看门狗interrupt_global_enable(0); // 打开全局中断// 此处编写用户代码 例如外设初始化代码等mt9v03x_init();//初始化摄像头// 此处编写用户代码 例如外设初始化代码等cpu_wait_event_ready(); // 等待所有核心初始化完毕while (TRUE){// 此处编写需要循环执行的代码TFT180_SHOW();if(mt9v03x_finish_flag) //一幅图像完全采集完毕后,再进行图像的显示判断和显示{//Set_image_towvalues(150); //固定阈值二值化BandW_threshold = otsuThreshold_fast(mt9v03x_image[0]);//大津法得到动态阈值BandW_thresholdSet_image_towvalues(BandW_threshold); //动态阈值二值化得到二维数组mt9v03x_image_BandWtft180_displayimage03x(mt9v03x_image_BandW[0],MT9V03X_W,MT9V03X_H);//显示二值化后的图像mt9v03x_finish_flag = 0;//图像显示完成后才对标志位清零}// 此处编写需要循环执行的代码}
}通过调用大津法处理函数,将原始图像进行动态阈值二值化处理,也是会在显示屏上得到黑白图像,固定阈值二值化和动态阈值二值化处理哪个效果好,还得看实际情况。
相关文章:
智能汽车竞赛摄像头处理(3)——动态阈值二值化(大津法)
前言 (1)在上一节中,我们学习了对图像的固定二值化处理,可以将原始图像处理成二值化的黑白图像,这里面的本质就是将原来的二维数组进行了处理,处理后的二维数组里的元素都是0和255两个值。 (2…...

BGP协议
1.BGP相关概念 1.1 BGP的起源 不同自治系统(路由域)间路由交换与管理的需求推动了EGP的发展,但是EGP的算法简单,无法选路,从而被BGP取代。 自治系统:(AS) IGP:自治系统…...
一个完整工作流管理系统的组成部分
一个完整工作流管理系统的组成部分 一个完整的工作流管理系统通常由工作流引擎、工作流设计器、流程操作、工作流客户端程序、流程监控、表单设计器、与表单的集成以及与应用程序的集成八个部分组成。 一、工作流组成 1. 工作流引擎 工作流引擎作为工作流管理系统的核心部分&…...
鱼和熊掌如何兼得?一文解析RDS数据库存储架构升级
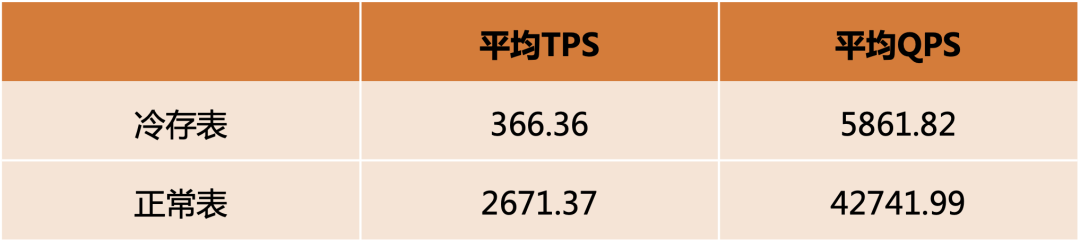
在2023年云栖大会上,阿里云数据库产品事业部负责人李飞飞在主题演讲中提到,瑶池数据库推出“DB存储”一体化能力,结合人工智能、机器学习、存储等方法和创新能力,实现Buffer Pool Extension能力和智能冷温热数据分层能力。在大会的…...
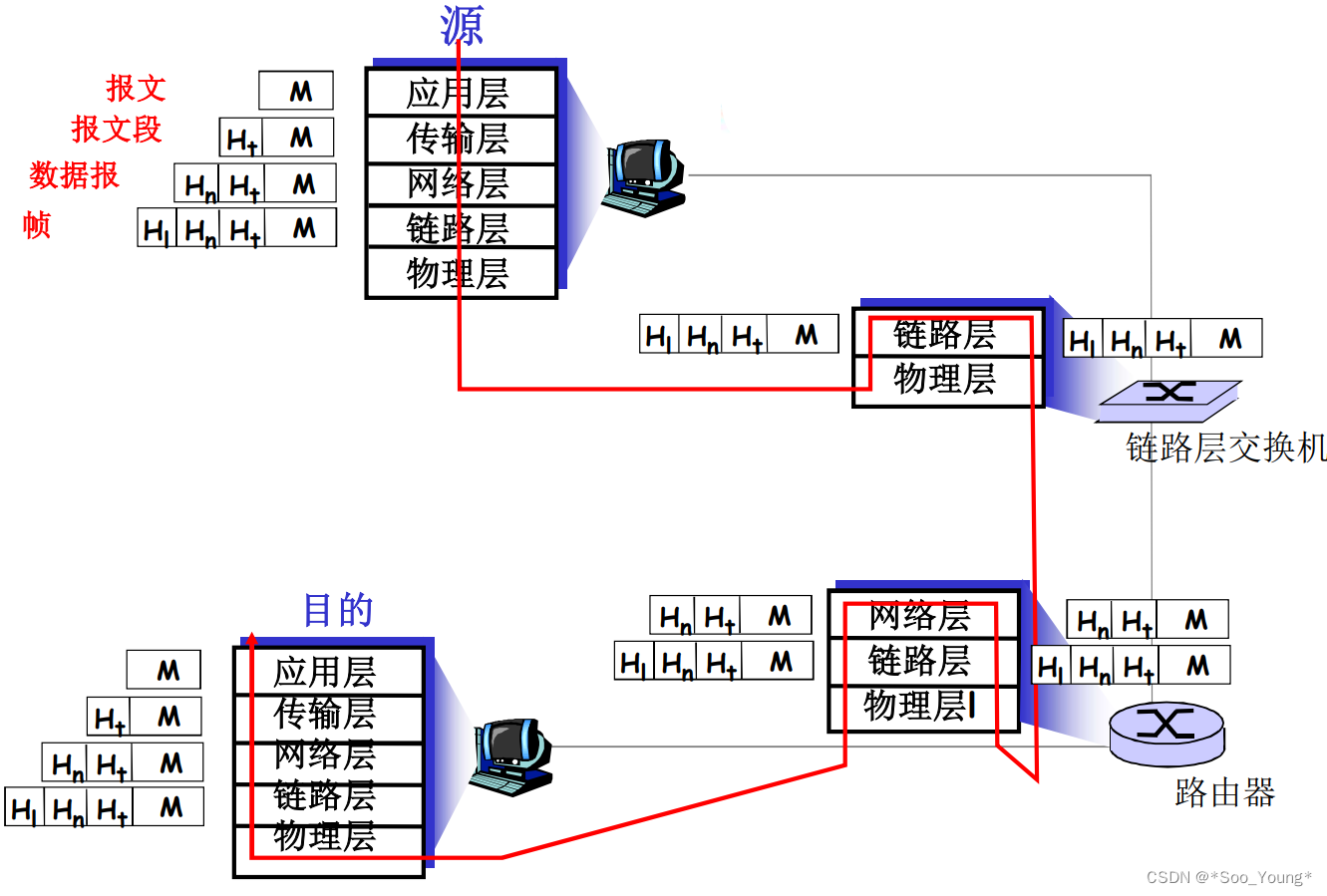
中科大计网学习记录笔记(五):协议层次和服务模型
前言: 学习视频:中科大郑烇、杨坚全套《计算机网络(自顶向下方法 第7版,James F.Kurose,Keith W.Ross)》课程 该视频是B站非常著名的计网学习视频,但相信很多朋友和我一样在听完前面的部分发现信…...

同构异机迁移方案2_目标服务器仅安装数据库软件scp物理文件
源端和目标端的数据库版本需要保持一致,补丁版本可以不一致,目标端磁盘空间不能小于源端空间,目标端只需要安装 Oracle 软件即可。 特别说明:本文档案例Oracle的安装路径不同,数据目录一致,采用scp的方式实…...

华为机考入门python3--(6)牛客6-质数因子
分类:质数、素数 知识点: 取余符号% 5%3 2 取整符号// 5//3 1 list中int元素转str map(str, list) 题目来自【牛客】 def prime_factors(n): """ 输入一个正整数n,输出它的所有质因子(重复的也…...

11月最新版付费进群源码自动定位+开源
Nginx 1.22.1 php5.6 mysql5.6 数据库配置:/config/database.php 配置后台域名:config/extra/ip.php 设置伪静态thinkphp 后台账号88886666 密码12345 代码结构 关键代码剖析 <?php // ----------------------------------------------------…...

Python算法题集_旋转图像
Python算法题集_旋转图像 题目48:旋转图像1. 示例说明2. 题目解析- 题意分解- 优化思路- 测量工具 3. 代码展开1) 标准求解【矩阵复本】2) 改进版一【矩阵转置矩阵反转】3) 改进版二【四值旋转】 4. 最优算法 题目48:旋转图像 本文为Python算法题集之一…...

[ChatGPT们】ChatGPT 如何辅助编程初探
主页:元存储的博客 全文 9000 字, 原创请勿转载。 我没有写过诗,但有人说我的代码像诗一样优雅 -- 雷军 图片来源:https://www.bilibili.com/video/BV1zL411X7oS/ 1. 引言 作为一个程序员,我们不仅要熟悉各种编程语…...

深入Spring MVC的工作流程
深入Spring MVC的工作流程 在Spring MVC的面试问题中,常常被询问到的一个问题。Spring MVC的程序中,HTTP请求是如何从开始到结束被处理的。为了研究这个问题,我们将需要深入学习一下Spring MVC框架的核心过程和工作流程。 1. 启动请求生命周…...
)
我的数据结构c(给自己用的)
目录 顺序表: 链表: 栈: 队列: 我想在之后的大学数据结构课上需要自己写来做题,但每次都自己写,那太麻烦了,所以我就将这个博客来把所有的C语言的数据结构弄上去, 问我为什么不…...
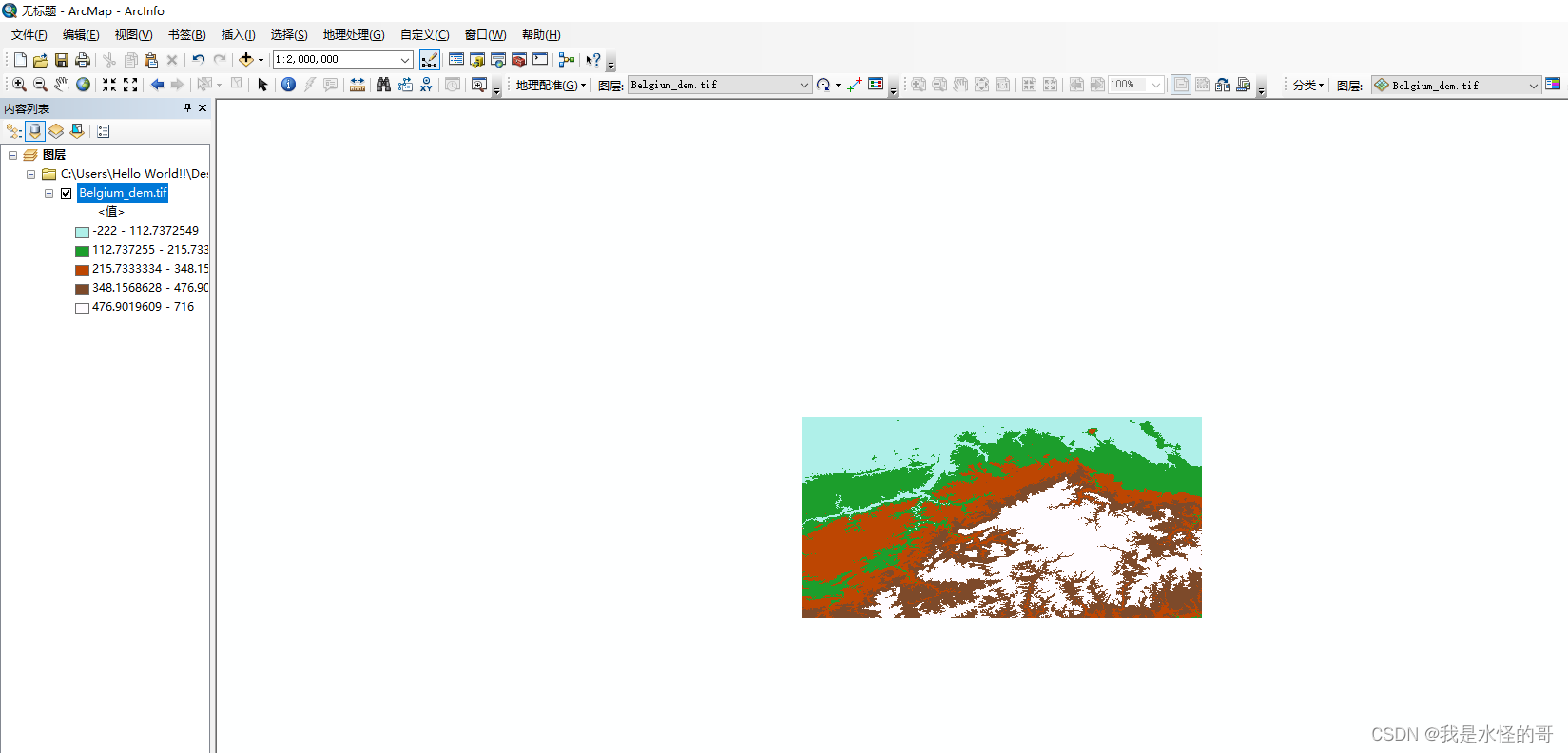
使用Arcgis对欧洲雷达高分辨率降水数据重投影
当前需要使用欧洲高分辨雷达降水数据,但是这个数据的投影问题非常头疼。实际的投影应该长这样(https://gist.github.com/kmuehlbauer/645e42a53b30752230c08c20a9c964f9?permalink_comment_id2954366https://gist.github.com/kmuehlbauer/645e42a53b307…...
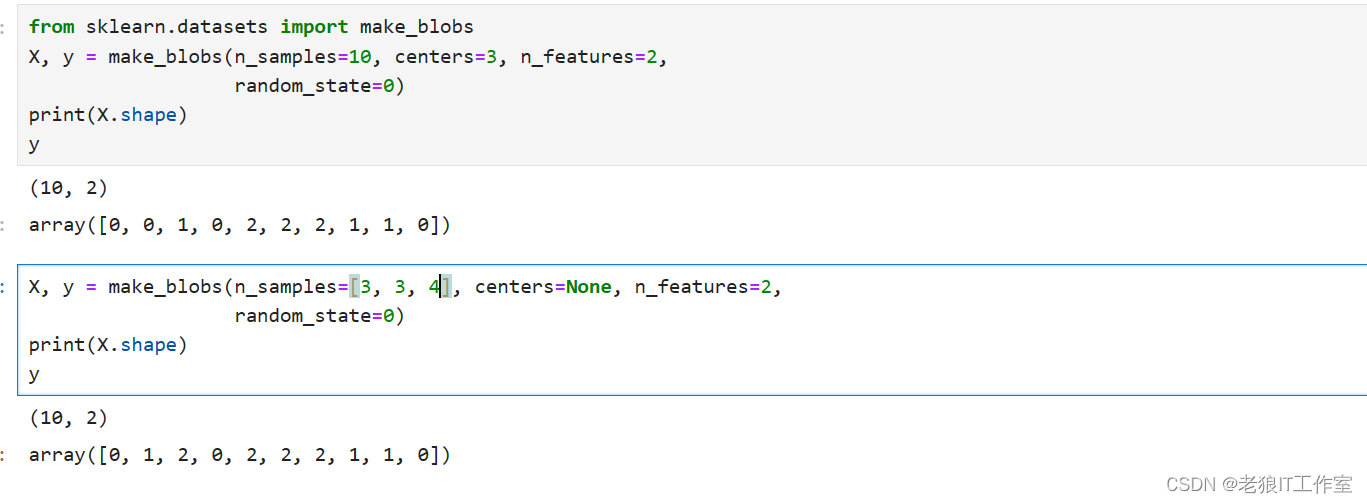
[Python] scikit-learn中数据集模块介绍和使用案例
sklearn.datasets模块介绍 在scikit-learn中,可以使用sklearn.datasets模块中的函数来构建数据集。这个模块提供了用于加载和生成数据集的函数。 API Reference — scikit-learn 1.4.0 documentation 以下是一些常用的sklearn.datasets模块中的函数 load_iris() …...

Qt-互斥量-临界区-QMutex-QMutexLocker-QReadWriteLock
文章目录 1.QMutex2.QMutexLocker3.QReadWriteLock 在Qt中,互斥量(Mutex)是用于同步多线程访问共享资源的一种机制。临界区(Critical Section)是指一段必须由单个线程执行的代码区域,防止多个线程同时执行这…...
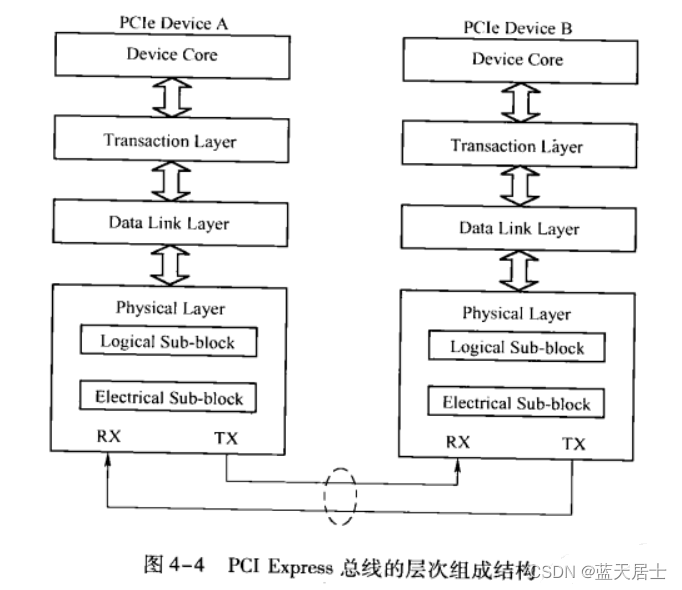
《PCI Express体系结构导读》随记 —— 第II篇 第4章 PCIe总线概述(6)
接前一篇文章:《PCI Express体系结构导读》随记 —— 第II篇 第4章 PCIe总线概述(5) 4.1 PCIe总线的基础知识 与PCI总线不同,PCIe总线使用端到端的连接方式,在一条PCIe链路的两端只能各连接一个设备,这两个…...

uniapp 高德地图显示
1. uniapp 高德地图显示 使用前需到**高德开放平台(https://lbs.amap.com/)**创建应用并申请Key 登录 高德开放平台,进入“控制台”,如果没有注册账号请先根据页面提示注册账号 打开 “应用管理” -> “我的应用”页面…...

2024年最新幻兽帕鲁服务器搭建教程
玩转幻兽帕鲁服务器,阿里云推出新手0基础一键部署幻兽帕鲁服务器教程,傻瓜式一键部署,3分钟即可成功创建一台Palworld专属服务器,成本仅需26元,阿里云服务器网aliyunfuwuqi.com分享2024年新版基于阿里云搭建幻兽帕鲁服…...

重新配置vue项目时出现的:连接已断开问题
在新机器上配置完node.js、vue-cli,配置了node_modules后,命令行运行vue ui后,出现了如下报错: C:\Users\LEN>vue ui 🚀 Starting GUI... 🌠 Ready on http://localhost:8000 node:events:496throw e…...

四、Redis之配置文件
redis配置文件的名称 redis.conf 通过命令 find / -name redis.confvim redis.conf通过 : set nu 设置行号: set nonu 取消行号/关键字 搜索关键字: set noh 取消高亮选择4.1 Units 配置大小单位,开头定义了一些基本的度量单位,只支持 bytes&#…...

别再用默认源了!Ubuntu22.04换源后软件下载速度提升10倍的秘密
别再用默认源了!Ubuntu22.04换源后软件下载速度提升10倍的秘密 当你在Ubuntu终端里输入apt update后盯着缓慢爬升的进度条发呆时,有没有想过这背后隐藏着一个影响开发效率的关键因素?作为长期使用Ubuntu的开发老鸟,我发现90%的用户…...

3大核心功能解密:Greasy Fork如何成为浏览器扩展的终极解决方案
3大核心功能解密:Greasy Fork如何成为浏览器扩展的终极解决方案 【免费下载链接】greasyfork An online repository of user scripts. 项目地址: https://gitcode.com/gh_mirrors/gr/greasyfork 你是否曾为浏览器功能不足而烦恼?想要屏蔽烦人的广…...
)
深度学习概率分布与核心运算 —— 概率论的工具箱(八)
1. 定位导航 上一篇回答了"为什么需要概率"。本篇开始构建概率论的基本工具箱——这些工具是理解后续所有内容(损失函数、贝叶斯推断、生成模型、信息论)的数学基础。 本篇覆盖六大核心概念:随机变量与概率分布(PMF/PDF)、边缘概率、条件概率、链式法则、独立…...

细说杨乃武与小白菜案
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录前言一、案件二、精神分析学---心理防御机制三、关于我自己总结前言 一、案件 略,后面补 二、精神分析学—心理防御机制 在这个案件我主要关注县令和小…...

WarcraftHelper:魔兽争霸3兼容性救星,让经典游戏在现代电脑上重生!
WarcraftHelper:魔兽争霸3兼容性救星,让经典游戏在现代电脑上重生! 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper …...

GHelper:华硕笔记本性能优化与硬件控制的开源解决方案
GHelper:华硕笔记本性能优化与硬件控制的开源解决方案 【免费下载链接】g-helper Lightweight, open-source control tool for ASUS laptops and ROG Ally. Manage performance modes, fans, GPU, battery, and RGB lighting across Zephyrus, Flow, TUF, Strix, Sc…...

如何15分钟搞定黑苹果配置:OpCore-Simplify零代码自动化终极指南
如何15分钟搞定黑苹果配置:OpCore-Simplify零代码自动化终极指南 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为复杂的黑苹果配置头…...

3dsconv完全指南:从格式转换到批量处理的开源解决方案
3dsconv完全指南:从格式转换到批量处理的开源解决方案 【免费下载链接】3dsconv Python script to convert Nintendo 3DS CCI (".cci", ".3ds") files to the CIA format 项目地址: https://gitcode.com/gh_mirrors/3d/3dsconv 你是否曾…...

4个步骤掌握系统字体定制:No!! MeiryoUI的无限制个性化解决方案
4个步骤掌握系统字体定制:No!! MeiryoUI的无限制个性化解决方案 【免费下载链接】noMeiryoUI No!! MeiryoUI is Windows system font setting tool on Windows 8.1/10/11. 项目地址: https://gitcode.com/gh_mirrors/no/noMeiryoUI 告别系统字体枷锁 → 零基…...
踩坑实录:从I2C上拉到坐标翻转的完整避坑指南)
ESP32S3驱动微雪2.8寸屏(CST328触摸IC)踩坑实录:从I2C上拉到坐标翻转的完整避坑指南
ESP32S3驱动CST328触摸屏实战避坑指南:从I2C配置到LVGL集成的完整解决方案 刚拿到微雪2.8寸屏时,我本以为按照常规流程就能快速集成触摸功能,没想到CST328这颗冷门触摸IC给了我当头一棒。市面上几乎找不到完整的ESP-IDF驱动实现,海…...