Golang的for循环变量和goroutine的陷阱,1.22版本的更新
先来看一段golang 1.22版本之前的for循环的代码
package mainimport "fmt"func main() {done := make(chan bool)values := []string{"chen", "hai", "feng"}for _, v := range values {fmt.Println("start")go func() {fmt.Println(v)done <- true}()fmt.Println("end")}for _ = range values {<-done}
}
运行结果
输出的都是最后的"feng"
在for循环体里,匿名函数和循环变量v形成了闭包。循环变量v只会创建一次,每次迭代都会更新。而且这样的写法会导致for循环结束后才执行goroutine代码,这时候变量v里保存的是最后一个值,所以这里会输出"feng"。
以下提供两种常用的正确写法
第一种方法是在匿名函数中添加参数val,每个val都会被独立计算并保存到goroutine的栈中,所以可以达到预期的结果
package mainimport "fmt"func main() {done := make(chan bool)values := []string{"chen", "hai", "feng"}for _, v := range values {fmt.Println("start")go func(val interface{}) {fmt.Println(val)done <- true}(v)fmt.Println("end")}for _ = range values {<-done}
}
此时的运行结果
第二种写法:在for循环体内定义新的变量。循环体内定义的变量在遍历的过程中是不共享的,所以可以达到期望的效果。
package mainimport "fmt"func main() {done := make(chan bool)values := []string{"chen", "hai", "feng"}for _, v := range values {fmt.Println("start")val := vgo func() {fmt.Println(val)done <- true}()fmt.Println("end")}for _ = range values {<-done}
}
此时的运行结果
升级到最新版本1.22,同样的代码
package mainimport "fmt"func main() {done := make(chan bool)values := []string{"chen", "hai", "feng"}for _, v := range values {fmt.Println("start")go func() {fmt.Println(v)done <- true}()fmt.Println("end")}for _ = range values {<-done}
}
现在运行结果如下

在golang 1.22中,循环的每次迭代都会创建新的变量,有效避免了以往版本中常见的闭包陷阱,提高了代码的安全性。
另外,1.22之前的版本,for range仅支持array, slice, string, map, channel等类型,现在新增了interger类型,这意味着我们可以像这样写代码
package mainimport "fmt"func main() {for i := range 10 {fmt.Println(i)}
}
相关文章:
Golang的for循环变量和goroutine的陷阱,1.22版本的更新
先来看一段golang 1.22版本之前的for循环的代码 package mainimport "fmt"func main() {done : make(chan bool)values : []string{"chen", "hai", "feng"}for _, v : range values {fmt.Println("start")go func() {fmt.P…...

List 差集
文章目录 基本类型对象类型 基本类型 ListUtils.subtract 方法用于计算两个集合的差集,即返回 list1 中有但 list2 中没有的元素。 其中,list1 指向第一个集合,list2 指向第二个集合。该方法返回一个新的 List 对象,它包含所有在…...
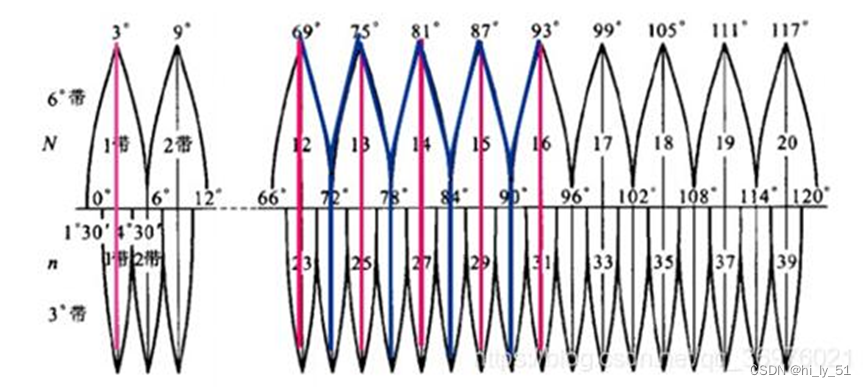
ArcGIS的UTM与高斯-克吕格投影分带要点总结
UTM(通用横轴墨卡托投影、等角横轴割椭圆柱投影)投影分带投影要点: 1)UTM投影采用6度分带 2)可根据公式计算,带数(经度整数位/6)的整数部分31 3)北半球地区࿰…...
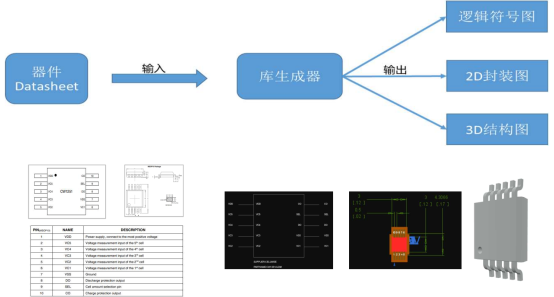
华为第二批难题一:基于预训练AI模型的元件库生成
我的理解:华为的这个难道应该是想通过大模型技术,识别元件手册上的图文内容,与现有建库工具结合,有潜力按标准生成各种库模型。 正好,我们正在研究,利用知识图谱技术快速生成装配模型,其中也涉…...
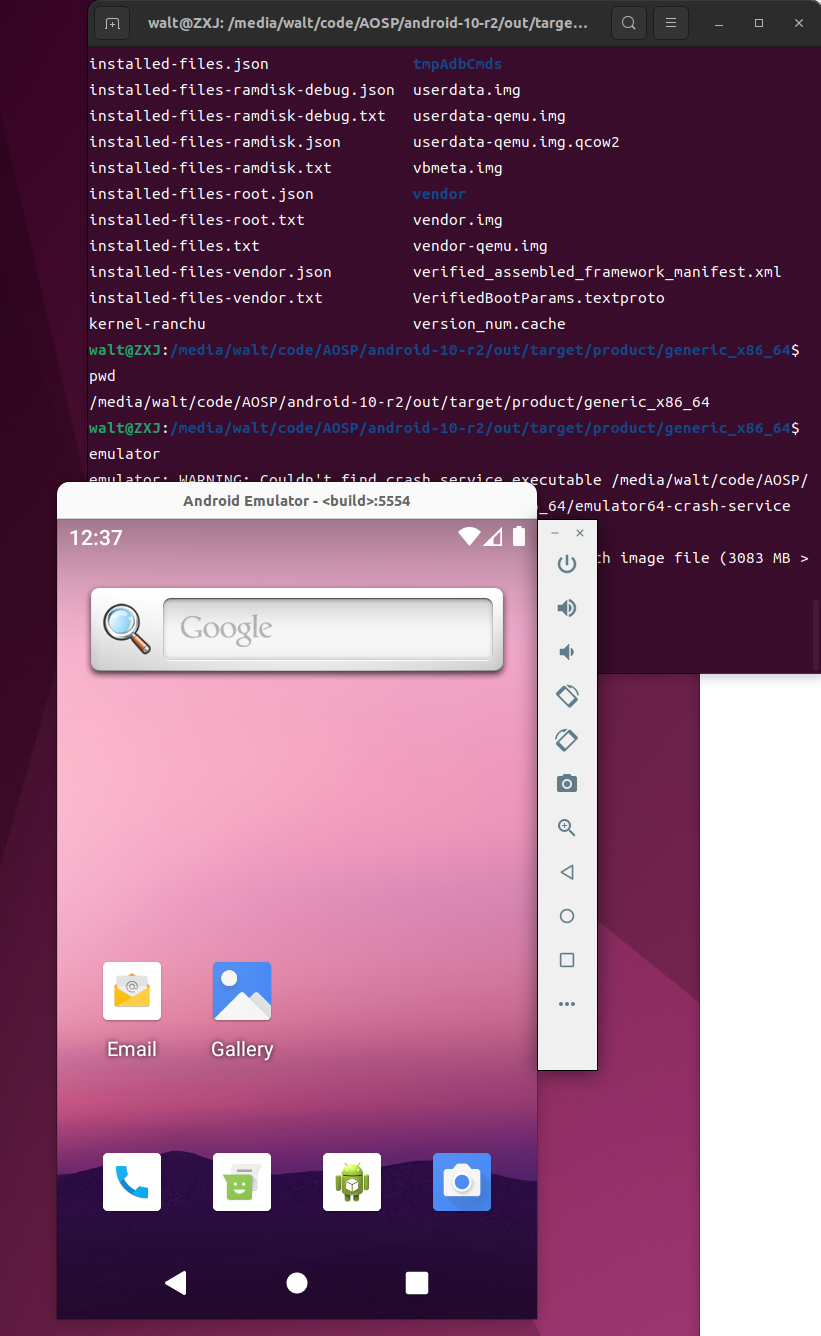
Android AOSP源码研究之万事开头难----经验教训记录
文章目录 1.概述2.Android源下载1.配置环境变量2.安装curl3.下载repo并授权4.创建一个文件夹保存源码5.设置repo的地址并配置为清华源6.初始化仓库7.指定我们需要下载的源码分支并初始化 2.1 使用移动硬盘存放Android源码的坑2.2 解决方法 3.Android源码编译4.Android源烧录 1.…...

动态数据源
一、部署 1、导入依赖 <dependency><groupId>com.baomidou</groupId><artifactId>dynamic-datasource-spring-boot-starter</artifactId><version>3.1.0</version></dependency>2、编写yml 配置文件 spring:datasource:dyna…...

2024.1.29力扣每日一题——自由之路
2024.1.29 题目来源我的题解方法一 动态规划 题目来源 力扣每日一题;题序:514 我的题解 方法一 动态规划 定义 dp[i][j] 表示从前往后拼写出 key的第 i个字符, ring 的第 j个字符与 12:00 方向对齐的最少步数(下标均从 0 开始&…...

Qt应用软件【协议篇】UDP示例
UDP协议简介 UDP(用户数据报协议)是一种无连接的网络协议,提供了简单但是不可靠的消息传输服务。与TCP不同,UDP不保证数据包的顺序、重复性或者可达性,但它在速度和效率上具有优势,特别适合那些对实时性要求高的应用,如视频流、在线游戏等。 Qt中的UDP编程 在Qt中,U…...

MyBatis之动态代理实现增删改查以及MyBatis-config.xml中读取DB信息文件和SQL中JavaBean别名配置
MyBatis之环境搭建以及实现增删改查 前言实现步骤1. 编写MyBatis-config.xml配置文件2. 编写Mapper.xml文件(增删改查SQL文)3. 定义PeronMapper接口4. 编写测试类1. 执行步骤2. 代码实例3. 运行log 开发环境构造图总结 前言 上一篇文章,我们…...
百面嵌入式专栏(面试题)内存管理相关面试题1.0
沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇我们将介绍内存管理相关面试题 。 一、内存管理相关面试题 page数据结构中的_refcount和_mapcount有什么区别?匿名页面和高速缓存页面有什么区别?page数据结构中有一个锁,我们称为页锁,请问trylock_page()和loc…...

SpringMVC 1.请求参数检查 2.全局异常处理 3.请求参数封装为Pojo
ErrorEnum.java // 枚举所有的错误 package com.example.demo.enums;import lombok.Getter;public enum ErrorEnum {SYSTEM_ERROR(-1, "系统错误"),PARAM_ERROR(-2, "参数错误"),OK(0, "成功"),;Getterprivate final int code;Getterprivate fi…...
7机器人位姿的数学描述与坐标变
由上次刚体的空间转动直接切换为机器人相关术语。 1.机器人位姿的数学描述与坐标变换 1.1位姿描述 {B}相对于{A}的姿态描述用3x3矩阵表示为: 式中为三个单位正交主矢量,分别表示刚体坐标系{B}的三个坐标轴XBYBZB在参考系{A}中的方位,∠XBXA表…...
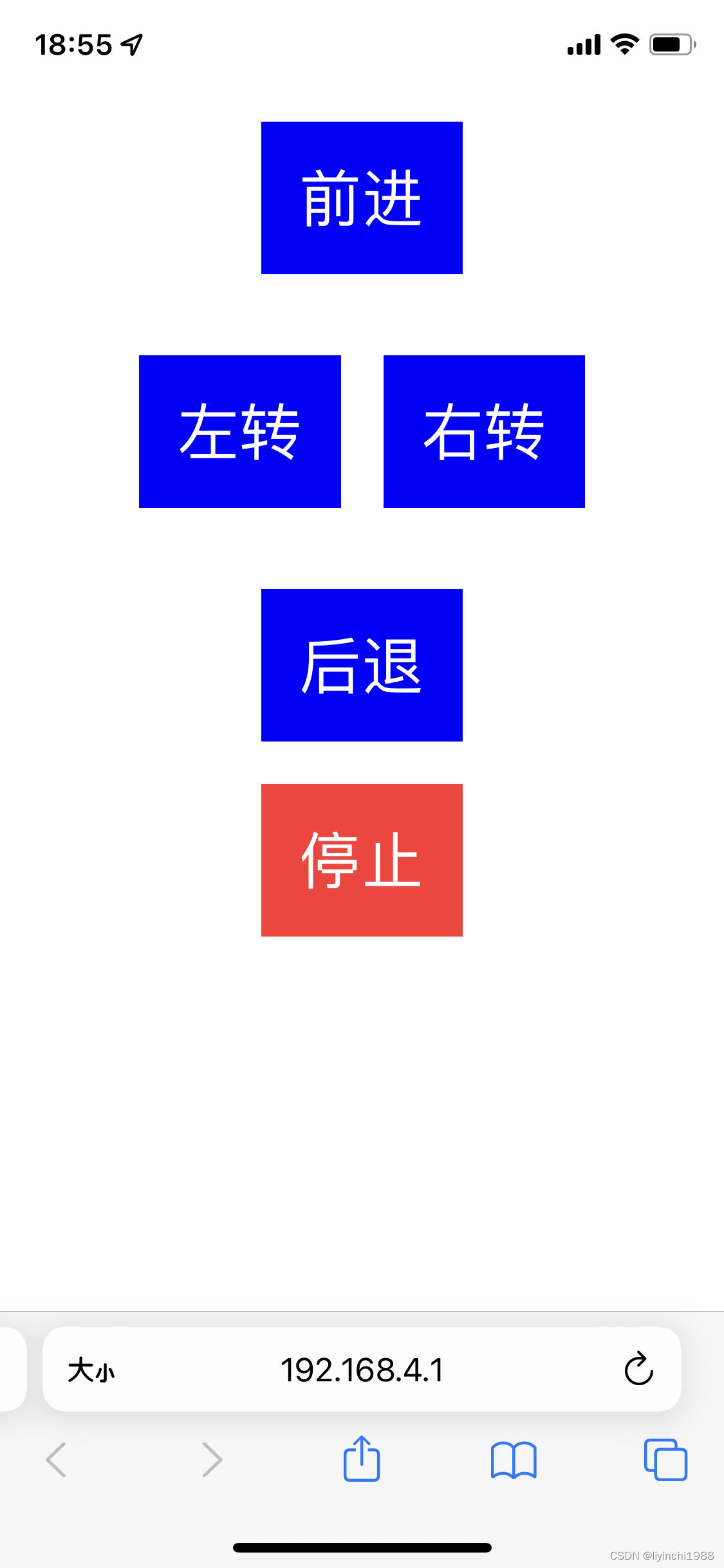
基于ESP8266 开发板(MCU)遥控小车
遥控小车 遥控界面 【项目源码】 第一版ESP8266 https://github.com/liyinchigithub/esp8266_car_webServerhttps://github.com/liyinchigithub/esp8266_car_webServer 第二版ESP32 GitHub - liyinchigithub/esp32-wroom-car: 嵌入式单片机 ESP32 Arduino 遥控小车&a…...

【C生万物】C语言数据类型、变量和运算符
📚博客主页:爱敲代码的小杨. ✨专栏:《Java SE语法》 | 《数据结构与算法》 | 《C生万物》 ❤️感谢大家点赞👍🏻收藏⭐评论✍🏻,您的三连就是我持续更新的动力❤️ 🙏小杨水平有…...
CTF--Web安全--SQL注入之‘绕过方法’
一、什么是绕过注入 众所周知,SQL注入是利用源码中的漏洞进行注入的,但是有攻击手段,就会有防御手段。很多题目和网站会在源码中设置反SQL注入的机制。SQL注入中常用的命令,符号,甚至空格,会在反SQL机制中…...

线程池常用的阻塞队列
新任务来的时候,会先判断当前运行的线程数量是否达到核心线程数,如果达到的话,新任务就会被存放在队列中。 不同的线程池会选用不同的阻塞队列,我们可以结合内置线程池来分析。 ● 容量为 Integer.MAX_VALUE 的 LinkedBlockingQue…...
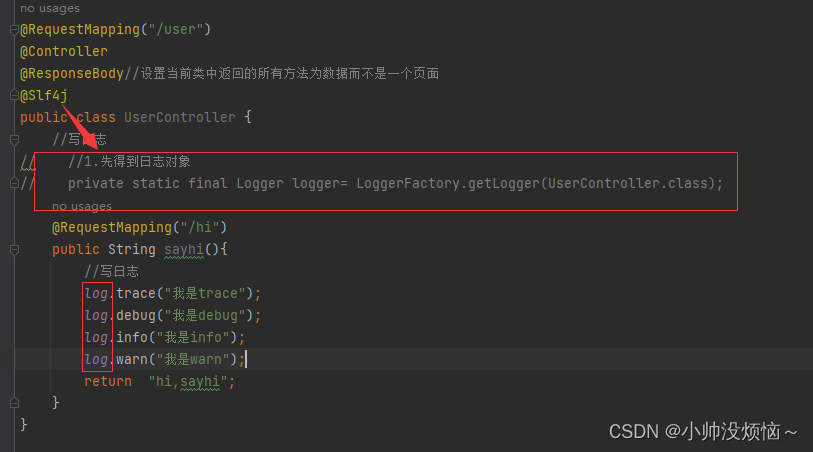
【Java EE】----SpringBoot的日志文件
1.SpringBoot使用日志 先得到日志对象通过日志对象提供的方法进行打印 2.打印日志的信息 3.日志级别 作用: 可以筛选出重要的信息不同环境实现不同日志级别的需求 ⽇志的级别分为:(1-6级别从低到高) trace:微量&#…...
【网络安全】2024年暗网威胁分析及发展预测
暗网因其非法活动而臭名昭著,现已发展成为一个用于各种非法目的的地下网络市场。 它是网络犯罪分子的中心,为被盗数据交易、黑客服务和邪恶活动合作提供了机会。为了帮助企业组织更好地了解暗网发展形势,近日,卡巴斯基的安全研究…...
SpringMVC-组件解析
一、引子 我们在上一篇文章Spring MVC-基本概念中,为读者解释了如何使用SpringMVC框架,将承接客户端请求的工作从原生的Servlet转移到我们熟知的Controller中。那么我们不禁会好奇,SpringMVC框架到底做了什么,是怎么把请求分发给…...

ubuntu22.04@laptop OpenCV Get Started: 002_reading_writing_videos
ubuntu22.04laptop OpenCV Get Started: 002_reading_writing_videos 1. 源由2. Read/Display/Write应用Demo3 video_read_from_file3.1 C应用Demo3.2 Python应用Demo3.3 重点过程分析3.3.1 读取视频文件3.3.2 读取文件信息3.3.3 帧读取&显示 4 video_read_from_image_sequ…...

DOM Node:深入解析与高效使用
DOM Node:深入解析与高效使用 引言 DOM(Document Object Model)是现代网页开发的核心技术之一,它允许开发者以程序化的方式操作HTML文档。DOM Node是DOM的核心概念之一,理解并熟练使用DOM Node对于提高网页开发效率至关重要。本文将深入解析DOM Node的概念、类型、属性和…...

2026年主流地图API AI功能开发与零代码工具横评
核心观点摘要 行业趋势判断:AI与零代码正深度融合地图API开发,推动位置智能从专业编码向业务自助快速演进,2026年主流平台将在多模态数据融合与行业化场景能力上形成分水岭。选型关键维度:需综合考量数据覆盖广度、模型智能水平、…...

如何彻底解决Windows热键冲突问题:Hotkey Detective的完整实战指南
如何彻底解决Windows热键冲突问题:Hotkey Detective的完整实战指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective …...

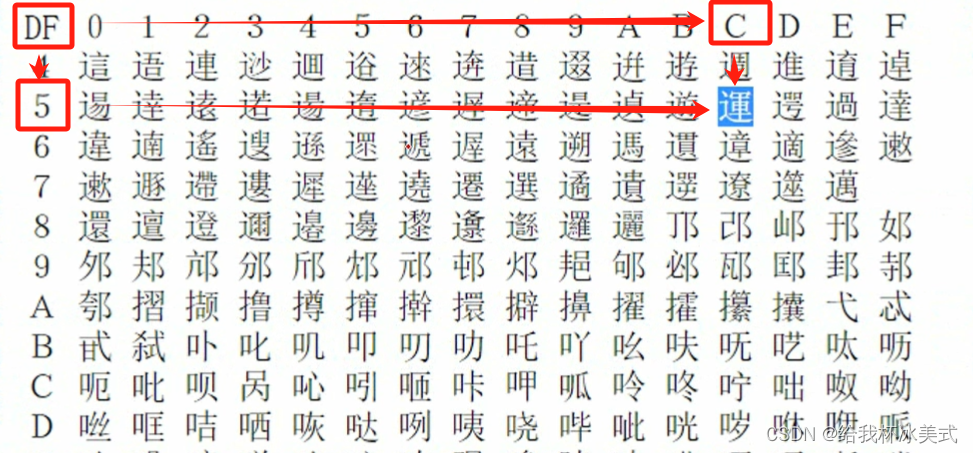
汉字可视化探索平台:基于Flask+Vue的汉字浏览系统架构与实现
1. 项目概述:一个汉字学习者的“浏览器”如果你和我一样,对汉字的结构、演变和背后的文化故事着迷,那你一定经历过这样的时刻:在阅读古籍、碑帖,或者仅仅是看到一个生僻字时,心里会冒出无数个问号——这个字…...

ARM PMU性能监控架构与寄存器详解
1. ARM PMU性能监控架构概述 性能监控单元(Performance Monitoring Unit, PMU)是现代处理器中用于硬件级性能分析的关键模块。作为ARM架构的重要组成部分,PMU通过一组可编程计数器来记录处理器运行过程中发生的各类微架构事件,为系统性能分析和优化提供数…...

中文知识管理利器:本地化部署与向量检索实践指南
1. 项目概述:一个面向中文用户的知识管理利器 最近在折腾个人知识库,发现了一个挺有意思的开源项目,叫 RomeoSY/zh-knowledge-manager 。乍一看名字,你可能觉得这又是一个“知识管理”工具,市面上不是有 Notion、Ob…...

3步搞定B站视频下载:BBDown让你的收藏从未如此简单 [特殊字符]
3步搞定B站视频下载:BBDown让你的收藏从未如此简单 🎬 【免费下载链接】BBDown Bilibili Downloader. 一个命令行式哔哩哔哩下载器. 项目地址: https://gitcode.com/gh_mirrors/bb/BBDown 还在为无法离线观看B站优质内容而烦恼吗?BBDo…...

记一次ubuntu 22.04安装旧版 MongoDB 4.2
22.04版本比较新,由于mongodb 2.4太老了,安装会遇到问题。特此记录1. 下载mongodb包wget https://fastdl.mongodb.org/linux/mongodb-linux-x86_64-ubuntu1804-4.2.24.tgz2. 解压到当前目录sudo tar -zxvf mongodb-linux-x86_64-ubuntu1804-4.2.24.tgz3.…...

GitHub加速终极指南:3步让你的下载速度提升10倍!
GitHub加速终极指南:3步让你的下载速度提升10倍! 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 还在为Git…...

浏览器运行Cursor AI编辑器:Docker+KasmVNC部署全攻略
1. 项目概述:在浏览器中运行 Cursor AI 编辑器如果你是一名开发者,大概率听说过或者正在使用 Cursor——这款集成了强大 AI 辅助编程能力的编辑器。它基于 VS Code,但深度整合了类似 ChatGPT 的对话和代码生成功能,能极大提升编码…...