从Unity到Three.js(计时器、Transform)
计时器、模型对象平移函数、枚举定义的使用
对应unity中的一些常用功能
import * as THREE from 'three';const scene = new THREE.Scene();
const camera = new THREE.PerspectiveCamera(60, window.innerWidth / window.innerHeight, 0.1, 1000);const renderer = new THREE.WebGLRenderer();
renderer.setSize(window.innerWidth, window.innerHeight);
document.body.appendChild(renderer.domElement);const geometry = new THREE.BoxGeometry(1, 1, 1);
const material = new THREE.MeshBasicMaterial({ color: 0x00ff00 });
const cube = new THREE.Mesh(geometry, material);
scene.add(cube);
camera.position.z = 50;//枚举定义
const direction = {UP: '上',DOWN: '下',LEFT: '左',RIGHT: '右'
};let state;
function changeState(dir) {console.log("dir=" + dir);if (state != dir) {state = dir;}
}//计时器
const clock = new THREE.Clock();
let timer = 0;
//枚举索引,不会js的int转枚举语法
let stateIndex = 1;
function updateChangeState() {timer += clock.getDelta();if (timer >= 3) {timer = 0;stateIndex++;if (stateIndex == 5) {stateIndex = 1;}changeState(convertToEnum(stateIndex));}
}//自定义int转枚举方法
function convertToEnum(value) {switch (value) {case 1:return direction.UP;case 2:return direction.LEFT;case 3:return direction.DOWN;case 4:return direction.RIGHT;}
}//更新模型位置
function updateSetObjPosition() {switch (state) {case direction.UP:cube.translateY(0.1);break;case direction.DOWN:cube.translateY(-0.1);break;case direction.LEFT:cube.translateX(-0.1);break;case direction.RIGHT:cube.translateX(0.1);break;}
}function animate() {requestAnimationFrame(animate);updateChangeState();updateSetObjPosition();renderer.render(scene, camera);
}animate();相关文章:
)
从Unity到Three.js(计时器、Transform)
计时器、模型对象平移函数、枚举定义的使用 对应unity中的一些常用功能 import * as THREE from three;const scene new THREE.Scene(); const camera new THREE.PerspectiveCamera(60, window.innerWidth / window.innerHeight, 0.1, 1000);const renderer new THREE.WebG…...
红日靶场(初学)
按照以前的来说一般是有两层网络的内网和外网 这个也是这样的 所以需要两张网卡,一个用来向外网提供web服务,一个是通向内网 以下就是配置 以下就是一些相关信息 外网网段是写成了192.168.111.1/24 WEB PC DC kali 开始扫描 nmap -sS -sV -Pn -T4 19…...
形状操作)
【PyTorch】改变张量(Tensor)形状操作
PyTorch深度学习总结 第二章 PyTorch中改变张量(Tensor)形状操作 文章目录 PyTorch深度学习总结一、前言二、改变张量形状 一、前言 上文讲解了张量生成和信息获取的知识,本文将针对张量的操作进行详细讲解。 二、改变张量形状 1、改变张量形状的函数总结&#x…...
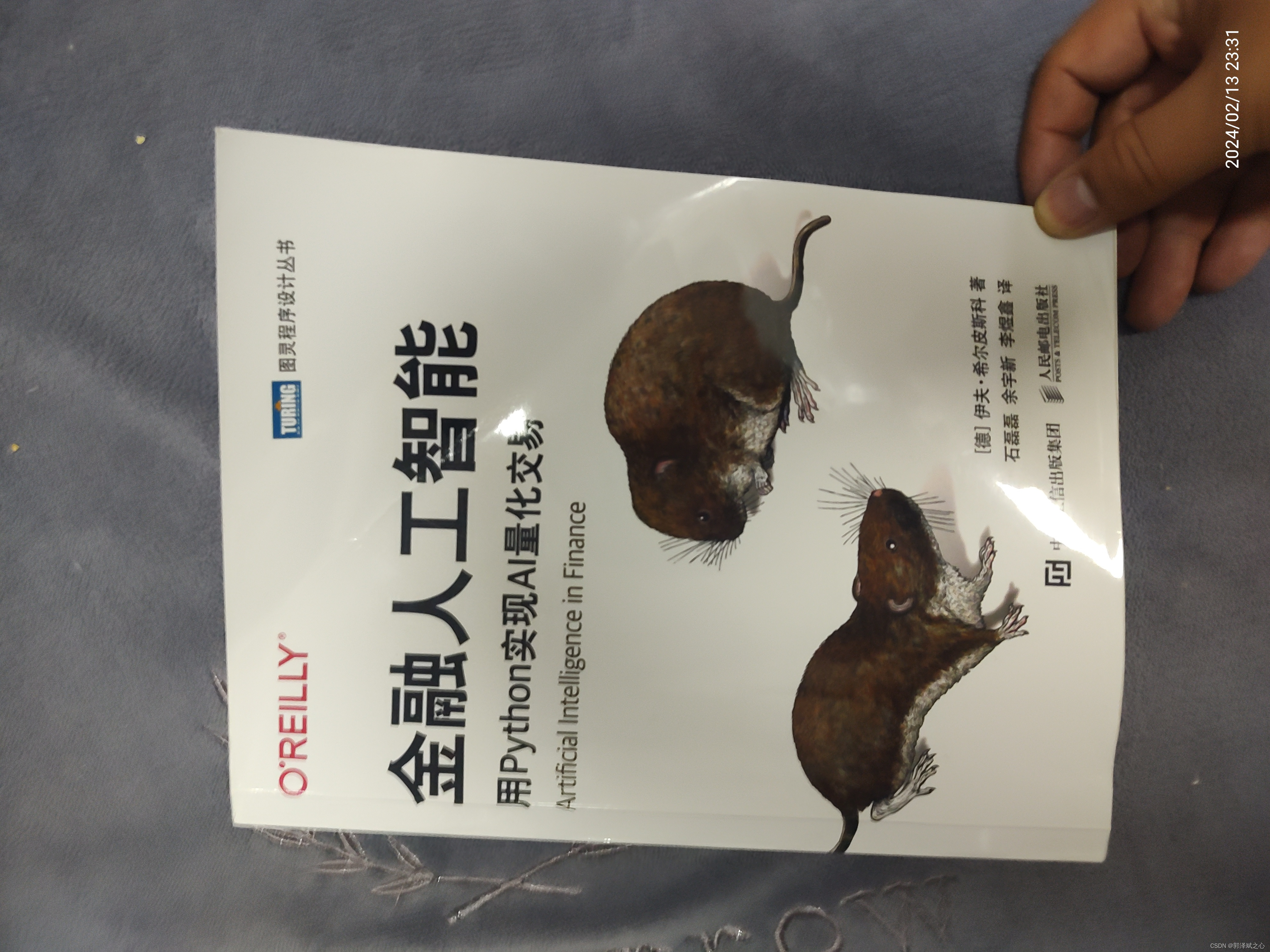
《金融人工智能:用python实现ai量化交易》
融合了数学、python、深度学习以及金融知识,是本推荐的好书。请收藏本文,读后再给大学总结。...
位运算+leetcode ( 2 )
题一:只出现一次的数字(1) 1.链接 136. 只出现一次的数字 - 力扣(LeetCode) 2.思想 借用位运算中异或操作符的特点,a^a0,0^aa先定义一个sum0就用一个循环来遍历这个数组,每次都进行…...
17 ABCD数码管显示与动态扫描原理
1. 驱动八位数码管循环点亮 1.1 数码管结构图 数码管有两种结构,共阴极和共阳极,ACX720板上的是共阳极数码管,低电平点亮。 1.2 三位数码管等效电路图 为了节约I/O接口,各个数码管的各段发光管被连在一起,通过sel端…...
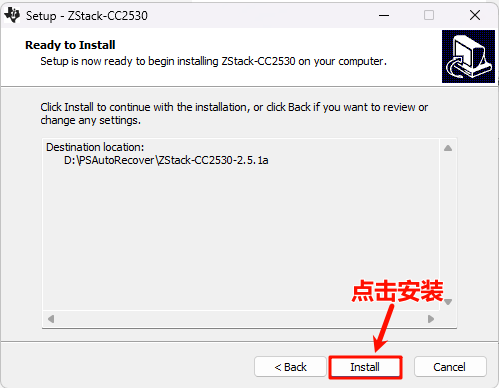
【Zigbee课程设计系列文章】Zigbee开发环境搭建
【Zigbee课程设计系列文章】Zigbee开发环境搭建 前言IAR 下载安装Z-Stack协议栈安装 🎊项目专栏:【Zigbee课程设计系列文章】(附详细使用教程完整代码原理图完整课设报告) 前言 👑由于无线传感器网络(也即…...
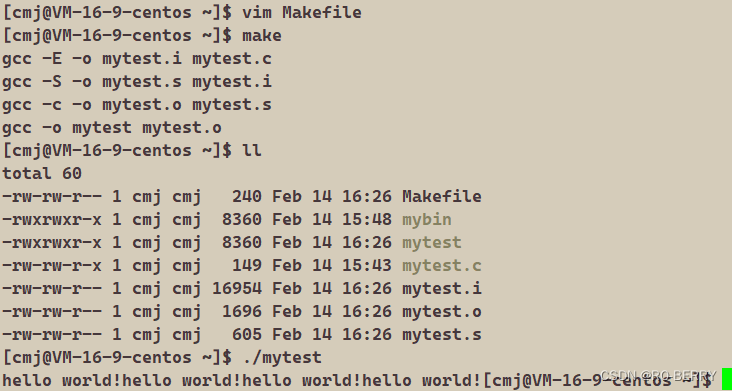
[Linux开发工具]项目自动化构建工具-make/Makefile
📙 作者简介 :RO-BERRY 📗 学习方向:致力于C、C、数据结构、TCP/IP、数据库等等一系列知识 📒 日后方向 : 偏向于CPP开发以及大数据方向,欢迎各位关注,谢谢各位的支持 目录 1.背景2.依赖关系和依…...

PLC_博图系列☞参数实例
PLC_博图系列☞参数实例 文章目录 PLC_博图系列☞参数实例背景介绍参数实例参数实例的工作原理创建参数实例将实例作为参数传送 关键字: PLC、 西门子、 博图、 Siemens 、 参数实例 背景介绍 这是一篇关于PLC编程的文章,特别是关于西门子的博图软件…...

LLaMA 2 和 QianWen-14B
阿里云通义千问14B模型开源!性能超越Llama2等同等尺寸模型 - 科技新闻 - EDA365电子论坛网 LLaMA 2 的硬件要求: LLaMA 2 系列模型有不同的参数量版本,如7B、13B和70B等。对于不同大小的模型,其硬件需求也有所不同。以下是一些硬…...

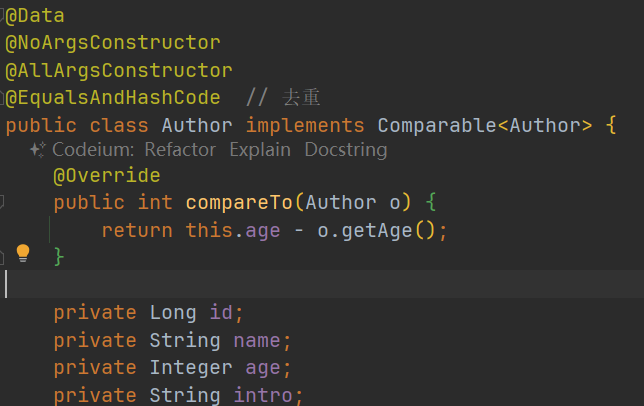
浅谈Java常见设计模式及实例
前言 Java 中常用的设计模式有很多种,其实平常用到的还比较少,但是还是有必要了解一下,可以按照实际情况运用到我们的代码中。按照类型可以基本分解为,创建型模式、结构型模式和行为型模式。 创建型模式 (Creational Patterns) 1…...
-总体介绍)
【RISC-V DSP设计】基于CEVA DSP架构的指令集分析(一)-总体介绍
目录 一、引言 二、CEVA-BX1™ DSP Library 概述 三、CEVA-BX1™ DSP Library 功能与特点 四、CEVA-BX1™ DSP Library 优势 今天开始我们继续对CEVA DSP的架构和指令集进行分析,基于对CEVA DSP的分析和了解,后续可以进行基于RISC-V内核架构的DSP指令…...

Rust标量类型详解
在Rust中,数据类型分为标量类型和复合类型。本篇博客将重点介绍Rust的标量类型,其中包括整数类型、浮点类型、布尔类型以及字符类型。 整数类型 Rust提供了多种整数类型,分为带符号整数和无符号整数。带符号整数表示可以为正数、零或负数&a…...

【双指针】【C++算法】1537. 最大得分
作者推荐 【深度优先搜索】【树】【图论】2973. 树中每个节点放置的金币数目 本文涉及知识点 双指针 LeetCoce 1537. 最大得分 你有两个 有序 且数组内元素互不相同的数组 nums1 和 nums2 。 一条 合法路径 定义如下: 选择数组 nums1 或者 nums2 开始遍历&…...

golang常用库之-操作数据库ORM:GORM 包介绍 | 一些 GORM 提示和注意事项
文章目录 golang操作数据库ORM:GORM 包介绍及实战一、什么是GORM 包二、GORM基本使用官方快速开始demo 一些 GORM 提示和注意事项 参考 golang操作数据库ORM:GORM 包介绍及实战 一、什么是GORM 包 官网:https://gorm.io/ github:…...
Stream流学习笔记
Stream流 创建流中间操作1、filter2、map3、distinct4、sorted5、limit6、skip7、flatMap 终结操作1、forEach2、count3、max&min4、collect5、查找与匹配 创建流 单例集合:集合对象.stream() List<Integer> list new ArrayList<>(); Stream<…...

单片机——FLASH(2)
文章目录 flash (stm32f40x 41x的内存映射中区域详解)flash写数据时 flash (stm32f40x 41x的内存映射中区域详解) Main memory 主存储区 放置代码和常数 System memory 系统存储区 方式bootloader代码 OTP区 一次性可编程区 选项…...
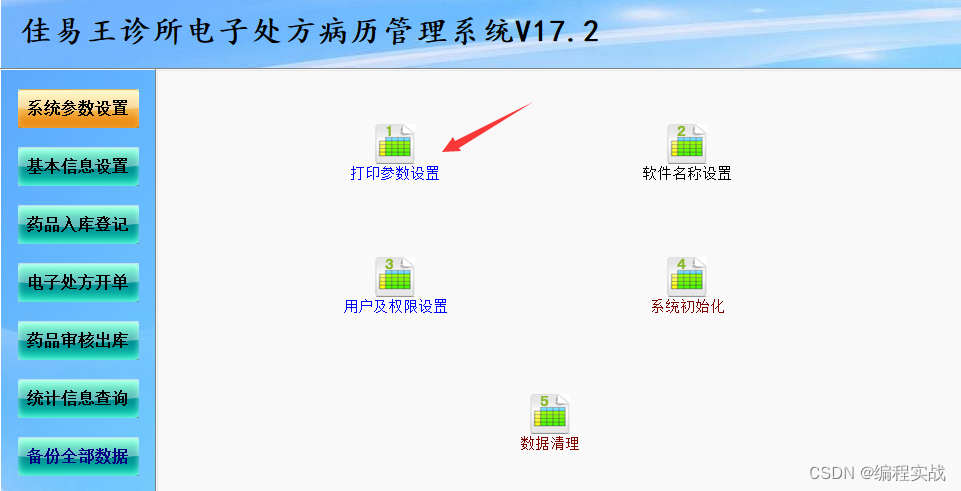
个体诊所门诊电子处方开单管理系统软件,配方模板病历模板设置一键导入操作教程
个体诊所门诊电子处方开单管理系统软件,配方模板病历模板设置一键导入操作教程 一、前言 以下操作教程以 佳易王诊所电子处方软件V17.2为例说明,最新版V17.3下载可以点击最下方官网卡片了解。 1、在现实生活中,医师开单可谓是争分夺秒&…...

ELAdmin 配置定时任务
定义方法 在自己的 Module 中写个要执行的方法。 比如获取微信公众号的 accessToken,每两个小时更新一次。这种的其实使用 Spring 的 Scheduled 更方便些,此处仅为演示。 package me.zhengjie.mp.task;import com.alibaba.fastjson.JSON; import lombo…...

【服务器部署】Docker环境的安装
基于CentOS系统的服务器环境下安装Docker环境,安装步骤参考官方指南:https://docs.docker.com/engine/install/centos/ 配置库 sudo yum install -y yum-utils sudo yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-c…...

Creo 9.0新手必看:别再乱点‘基准平面’了,这7种创建方法才是正确打开方式
Creo 9.0基准平面实战指南:7种高效创建方法与避坑技巧 刚接触Creo 9.0的工程师们,是否经常遇到这样的场景:面对一个复杂零件建模时,明明脑子里已经构思好了结构,却卡在第一步——找不到合适的草绘平面?或者…...

从MATLAB函数到Python字典:一个脚本搞定MATPOWER数据格式转换与可视化
从MATLAB函数到Python字典:电力系统数据跨平台处理实战 电力系统分析领域长期依赖MATLAB生态,而MATPOWER作为经典工具包更是以.m函数文件作为标准数据载体。但当我们需要结合Python强大的数据处理和可视化能力时,这种数据格式就成为了技术栈融…...

TruckSim 仿真工作流实战:从参数修改到结果对比
1. TruckSim仿真工作流基础入门 第一次打开TruckSim时,很多新手会被复杂的界面吓到。其实只要掌握几个核心概念,就能快速上手这个强大的车辆动力学仿真工具。我刚开始使用时也走过不少弯路,现在把这些经验分享给大家。 TruckSim的工作流可以简…...
)
保姆级教程:用Python+OpenCV高效切割Potsdam语义分割数据集(附完整代码)
PythonOpenCV实战:Potsdam语义分割数据集高效切割全流程解析 第一次接触Potsdam数据集时,面对那些6000x6000像素的巨幅航拍图像,我的GPU在训练时直接报显存不足的错误。这让我意识到,高分辨率图像的切割预处理不是可选项…...

基于ES32F0101的无传感器方波控制BLDC驱动方案设计与实践
1. 项目概述:从家庭草坪维护痛点出发家里有块小草坪的朋友,估计都经历过手动修剪的“痛苦”。蹲着、弯着,用剪刀或者手动推草机,折腾半天不仅腰酸背痛,剪出来的草坪还跟狗啃似的,高高低低,毫无美…...

昇腾C解交织API文档
DeInterleave 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.c…...

别再折腾了!Windows 11下TeX Live 2024 + VS Code配置LaTeX环境保姆级教程
别再折腾了!Windows 11下TeX Live 2024 VS Code配置LaTeX环境保姆级教程 对于科研人员和学术写作者来说,LaTeX始终是专业排版的不二之选。但传统LaTeX编辑器如TeXstudio虽然功能全面,却难以融入现代开发者的工作流。本文将带你用VS Code搭建…...
)
别再踩坑了!手把手教你解决RPM安装时的‘事务锁定’报错(附spec文件编写避坑指南)
RPM事务锁定的深度解析与实战避坑指南 在Linux系统管理中,RPM包管理器的"事务锁定"错误堪称开发者和管理员的噩梦。当你精心编写的spec文件在关键时刻抛出cant create transaction lock错误时,那种挫败感足以让任何技术专家抓狂。本文将带你深…...

如何在Windows 11上轻松安装Android应用?APK安装器完整教程
如何在Windows 11上轻松安装Android应用?APK安装器完整教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上运行Android应用却不想安装笨…...

2025终极指南:如何用PyGlossary打破词典格式壁垒
2025终极指南:如何用PyGlossary打破词典格式壁垒 【免费下载链接】pyglossary A tool for converting dictionary files aka glossaries. Mainly to help use our offline glossaries in any Open Source dictionary we like on any operating system / device. 项…...