【iOS ARKit】ARWorldMap
ARWorldMap 用于存储 ARSession 检测扫描到的空间信息数据,包括地标(Landmark)、特征点(Feature Point)、平面(Plane)等,以及使用者的操作信息,如使用者添加的 ARAnchor 和开发者自定义的一些信息。ARWorldMap 可以看作 ARSession 运行时的一次状态快照。
在技术上,每个具备世界跟踪的 ARSession 都会时刻维护一个内部的世界地图(internal world map),ARKit 正是利用这个地图定位跟踪用户设备的姿态,利用 getCurrent WorldMap(completionHandler:)方法获取的 ARWroldMap只是特定时刻内部世界地图的一个快照。
ARWorldMap 概述
持久化地存储应用进程数据,ARKit 提供了 ARWorldMap 功能,ARWorldMap 本质是将 AR 场景状态信息转换为可存储可传输的形式(即序列化)保存到文件系统或者数据库中,当使用者再次加载这些景状态信息后即可恢复应用进程。ARWorldMap 不仅保存了应用进程状态信息,还保存了场景特征点云息,在使用者再次加载这些状态数据后,ARKit 可通过保存的特征点云信息与当前用户摄像头获取的特点云信息进行对比匹配从而更新当前用户的坐标,确保两个坐标系的匹配。
存储与加载 ARWorldMap
存储 ARWorldMap最重要的是从 ARSession 中获取场景的 ARWorldMap 并序列化之,然后保件系统中。加载 ARWorldMap 则首先要从文件系统中获取ARWorldMap 并反序列化之,然后利用这个ARWorldMap 重启 ARSession。存储与加载 ARWorldMap 完整代码如下所示,稍后我们将对代码中所用技术进行详细解析。
//
// ARWorldMapSaveAndLoad.swift
// ARKitDeamo
//
// Created by zhaoquan du on 2024/2/20.
//import SwiftUI
import ARKit
import RealityKit
import Combinestruct ARWorldMapSaveAndLoad: View {var viewModel: ViewModel = ViewModel()var body: some View {ARWorldMapSaveAndLoadContainer(viewModel: viewModel).overlay(VStack{Spacer()HStack{Button(action: {loadWorldMap()}) {Text("加载信息").frame(width:150,height:50).font(.system(size: 17)).foregroundColor(.black).background(Color.white).opacity(0.6)}.cornerRadius(10)Button(action: {saveWorldMap()}) {Text("保存信息").frame(width:150,height:50).font(.system(size: 17)).foregroundColor(.black).background(Color.white).opacity(0.6)}.cornerRadius(10)}Spacer().frame(height: 40)}).edgesIgnoringSafeArea(.all).navigationTitle("保存与加载ARWorldMap")}var mapSaveURL: URL = {do {return try FileManager.default.url(for: .documentDirectory,in: .userDomainMask,appropriateFor: nil,create: true).appendingPathComponent("arworldmap.arexperience")} catch {fatalError("获取路径出错: \(error.localizedDescription)")}}()func saveWorldMap() {print("save:\(String(describing: viewModel.arView))")self.viewModel.arView?.session.getCurrentWorldMap(completionHandler: { loadWorld, error inguard let worldMap = loadWorld else {print("当前无法获取ARWorldMap:\(error!.localizedDescription)")return}do {let data = try NSKeyedArchiver.archivedData(withRootObject: worldMap, requiringSecureCoding: true)try data.write(to: mapSaveURL, options: [.atomic])print("ARWorldMap保存成功")} catch {fatalError("无法保存ARWorldMap: \(error.localizedDescription)")}})}func loadWorldMap() {print("load:\(String(describing: viewModel.arView))")guard let data = try? Data(contentsOf: mapSaveURL) else {print("load world map faile")return}var worldMap: ARWorldMap?do {worldMap = try NSKeyedUnarchiver.unarchivedObject(ofClass: ARWorldMap.self, from: data)} catch let error {print("ARWorldMap文件格式不正确:\(error)")}guard let worldMap = worldMap else {print("无法解压ARWorldMap")return}let config = ARWorldTrackingConfiguration()config.planeDetection = .horizontalconfig.initialWorldMap = worldMapself.viewModel.arView?.session.run(config,options: [.resetTracking, .removeExistingAnchors])}class ViewModel: NSObject,ARSessionDelegate{var arView: ARView? = nilvar planeEntity : ModelEntity? = nilvar raycastResult : ARRaycastResult?var isPlaced = falsevar robotAnchor: AnchorEntity?let robotAnchorName = "drummerRobot"var planeAnchor = AnchorEntity()func createPlane() {guard let arView = arView else {return}if let an = arView.scene.anchors.first(where: { an inan.name == "setModelPlane"}){arView.scene.anchors.remove(an)}do {let planeMesh = MeshResource.generatePlane(width: 0.15, depth: 0.15)var planeMaterial = SimpleMaterial(color: SimpleMaterial.Color.red, isMetallic: false)planeMaterial.color = try SimpleMaterial.BaseColor(tint:UIColor.yellow.withAlphaComponent(0.9999), texture: MaterialParameters.Texture(TextureResource.load(named: "AR_Placement_Indicator")))planeEntity = ModelEntity(mesh: planeMesh, materials: [planeMaterial])planeAnchor = AnchorEntity(plane: .horizontal)planeAnchor.addChild(planeEntity!)planeAnchor.name = "setModelPlane"arView.scene.addAnchor(planeAnchor)} catch let error {print("加载文件失败:\(error)")}}func setupGesture(){let tap = UITapGestureRecognizer(target: self, action: #selector(handleTap))self.arView?.addGestureRecognizer(tap)}@objc func handleTap(sender: UITapGestureRecognizer){sender.isEnabled = falsesender.removeTarget(nil, action: nil)isPlaced = truelet anchor = ARAnchor(name: robotAnchorName, transform: raycastResult?.worldTransform ?? simd_float4x4())self.arView?.session.add(anchor: anchor)robotAnchor = AnchorEntity(anchor: anchor)do {let robot = try ModelEntity.load(named: "toy_drummer")robotAnchor?.addChild(robot)robot.scale = [0.01,0.01,0.01]self.arView?.scene.addAnchor(robotAnchor!)print("Total animation count : \(robot.availableAnimations.count)")robot.playAnimation(robot.availableAnimations[0].repeat())} catch {print("找不到USDZ文件")}// var cancellable: Cancellable?
// cancellable = ModelEntity.loadModelAsync(named: "toy_drummer.usdz")
// .sink(receiveCompletion: { error in
// print("laod error:\(error)")
// cancellable?.cancel()
// }, receiveValue: {[weak self] model in
// guard let robotAnchor = self?.robotAnchor else {
// return
// }
// robotAnchor.addChild(model)
// model.scale = [0.01,0.01,0.01]
// self?.arView?.scene.addAnchor(robotAnchor)
// //用异步方法加载模型开启骨骼动画会crash,不知到是啥原因
// //model.playAnimation(model.availableAnimations[0].repeat())
// cancellable?.cancel()
// })planeEntity?.removeFromParent()planeEntity = nil}func session(_ session: ARSession, didUpdate frame: ARFrame) {guard !isPlaced, let arView = arView else{return}//射线检测guard let result = arView.raycast(from: arView.center, allowing: .estimatedPlane, alignment: .horizontal).first else {return}raycastResult = resultplaneEntity?.setTransformMatrix(result.worldTransform, relativeTo: nil)}func session(_ session: ARSession, didAdd anchors: [ARAnchor]) {guard !anchors.isEmpty,robotAnchor == nil else {return}var panchor: ARAnchor? = nilfor anchor in anchors {if anchor.name == robotAnchorName {panchor = anchorbreak}}guard let pAnchor = panchor else {return}//放置虚拟元素robotAnchor = AnchorEntity(anchor: pAnchor)do {let robot = try ModelEntity.load(named: "toy_drummer")robotAnchor?.addChild(robot)robot.scale = [0.01,0.01,0.01]self.arView?.scene.addAnchor(robotAnchor!)print("Total animation count : \(robot.availableAnimations.count)")robot.playAnimation(robot.availableAnimations[0].repeat())} catch {print("找不到USDZ文件")}isPlaced = trueplaneEntity?.removeFromParent()planeEntity = nilprint("加载模型成功")}}
}struct ARWorldMapSaveAndLoadContainer: UIViewRepresentable {var viewModel: ARWorldMapSaveAndLoad.ViewModelfunc makeUIView(context: Context) -> some ARView {let arView = ARView(frame: .zero)return arView}func updateUIView(_ uiView: UIViewType, context: Context) {let config = ARWorldTrackingConfiguration()config.planeDetection = .horizontaluiView.session.run(config)viewModel.arView = uiViewuiView.session.delegate = viewModelviewModel.createPlane()viewModel.setupGesture()}}
#Preview {ARWorldMapSaveAndLoad()
}
代码实现的功能如下:
(1)进行平面检测,在检测到可用平面时实例化一个指示图标用于指示放置位置。
(2)添加屏幕单击手势,在平面可用时通过单击屏幕会在指示图标位置放置虛拟机器人模型。
(3) 当用户单击“保存AR信息”按钮时会从当前 ARSesion 中获取 ARWorldMap 并序列化之,然后保存到文件系统中。
(4)当用户单击“加载AR信息”按钮时会从文件系统中加载ARWorldMap 并反序列化之,然后利用该ARWorldMap 重启 ARSession。
在第(2)项功能中,即 bandleTap()方法中的代码,我们首先将屏幕单击手势禁用,以防止添加多个机器人模型,然后禁止显示指示图标。随后利用命申点的坐标生成了一个ARAnchor,并将其添加到 ARSession中,注意这里设置了 ARAnchor 的名字(name)属性,这步很关键,因为后续我们需要利用该ARAnchor 的名字来恢复虚拟元素。后续代码是使用异步方式加载机器人模型,不赘述。
在第(3)项功能中,即 saveAR WorldMap()方法中代码,首先使用 getCurrent WorldMap()方法从 ARSession中获取 ARWorldVap,在闭包中,使用 let data = try NSKeyedArchiver. archivedData (with RootObject: map,requiringSecureCoding: true)语句对获取的ARWorldMap 进行序列化,然后使用 try data. write (to:mapSaveURL., options: [.atomic])方法将序列化后的 ARWorldMap 写人到文件系统中。
在第(4)项功能中,即 loadARWorldMap()方法中代码,首先从文件系统中读取存储的 ARWorldMap文件,并使用 let worldMap = try NSKeyedUnarchiver. unarchivedObject (ofClass: AR WorldMap. self,from:data)语句将其反序列化。在得到反序列化后的ARWorldMap 后,就可以利用其作为配置文件的initialWorldMap 属性重启 ARSession,当用户设备所在的物理环境与 ARWorldMap 保存时的物理环境一致时(即环境特征点信息匹配时),ARKit 就会校正用户设备坐标信息,将当前用户设备的坐标信息与ARWorldMap 中存储的用户设备坐标信息关联起来,并恢复相应的ARAnchor 信息,这时恢复的ARAnchor 姿态与ARWorldMap 中存储的姿态就是一致的,即ARAnchor 在物理环境中的位置与方向是一致的,这就达到了应用进程数据存储与加载的目的。
正如前文所述,ARWorldMap 并不会存储虚拟元素本身,因此,需要手动恢复虚拟元素,因为虚拟元素总是与ARAnchor 关联,利用 ARAnchor 的名字(name)属性我们就可以恢复关联的虚拟元素。在代码中,session(_:didAdd:)方法就用于恢复关联的虚拟元素,在该方法中,通过ARAnchor.name 进行ARAnchor的对比,如果名字一样且当前没有加载机器人模型则使用异步方法加载之。通过这种方式,我们就可以逐一地恢复所有的虚拟元素,从而恢复整个场景。
运行案例,在检测到的平面上添加虚拟元素后单击“保存地图”按钮保存 AR WorldMap,稍后单击“加载地图”按钮,或者关闭应用,在重新运行后单击“加载地图”按钮,可以看到虚拟机器人模型会出现在物理世界中的固定位置,如图所示。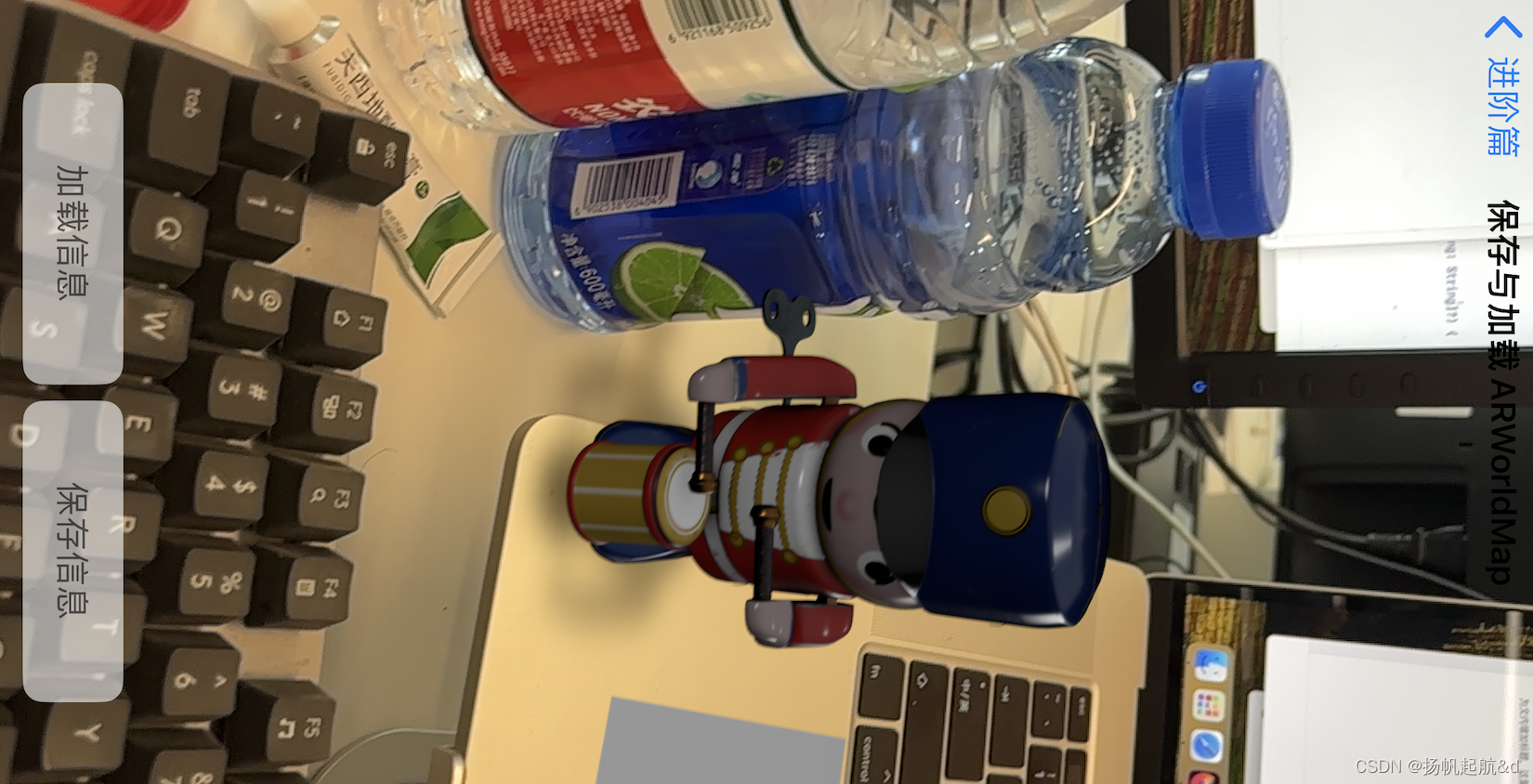
事实上,在将 ARWorldMap 设置 ARWorldTrackingConfiguration. initialWorldMap 属性启动ARSession 时,ARKit 会进入重定位(relocalize)过程,在这个过程中,ARKit 会尝试将当前设备摄像头采集的环境信息与 ARWorldMap 中存储的环境特征信息进行匹配。因此,保持当前设备姿态与存储ARWorldMap 时的设备姿态一致时(即提高环境特征点匹配成功率)可以更快速地重定位。
具体代码地址:GitHub - duzhaoquan/ARkitDemo
相关文章:
【iOS ARKit】ARWorldMap
ARWorldMap 用于存储 ARSession 检测扫描到的空间信息数据,包括地标(Landmark)、特征点(Feature Point)、平面(Plane)等,以及使用者的操作信息,如使用者添加的 ARAnchor …...

敏捷开发最佳实践:质量维度实践案例之软硬一体持续交付
在过去的Top敏捷实践案例中,我们可以看到企业或团队在敏捷质量管理上的创新,包括场景化测试、迭代T1自动化覆盖、一套自动用例到处运行、用例持续运行可视化等,而这也进一步促进了价值流动。本文将继续给大家带来全新的质量维度实践案例&…...
PMP证书的含金量如何?
PMP含金量更多的是“敲门砖”作用,公司招聘的门槛,现在坐项目的大部分都需要PMP/NPDP证书。 当然现在PMP管理模式也很热门,对企业发展很有利,各大企业都有引进改良应用在公司的项目上,之前在校友群里面大家在讨论PMP …...
Linux 下安装Jupyter
pip3 install jupyter pip3 install ipython -------------------------------------------- pip3 install jupyterlab jupyter lab pip3 list | grep jupyterlab 启动: python3 -m jupyter lab 2.安装朱皮特 pip3 install -i https://pypi.douban.com/simpl…...
docker 基础(二)
常见命令 Docker最常见的命令就是操作镜像、容器的命令,详见官方文档:https://docs.docker.com/ 数据卷 命令说明文档地址docker volume create创建数据卷docker volume createdocker volume ls创建数据卷docker volume lsdocker volume rm查看所有数…...
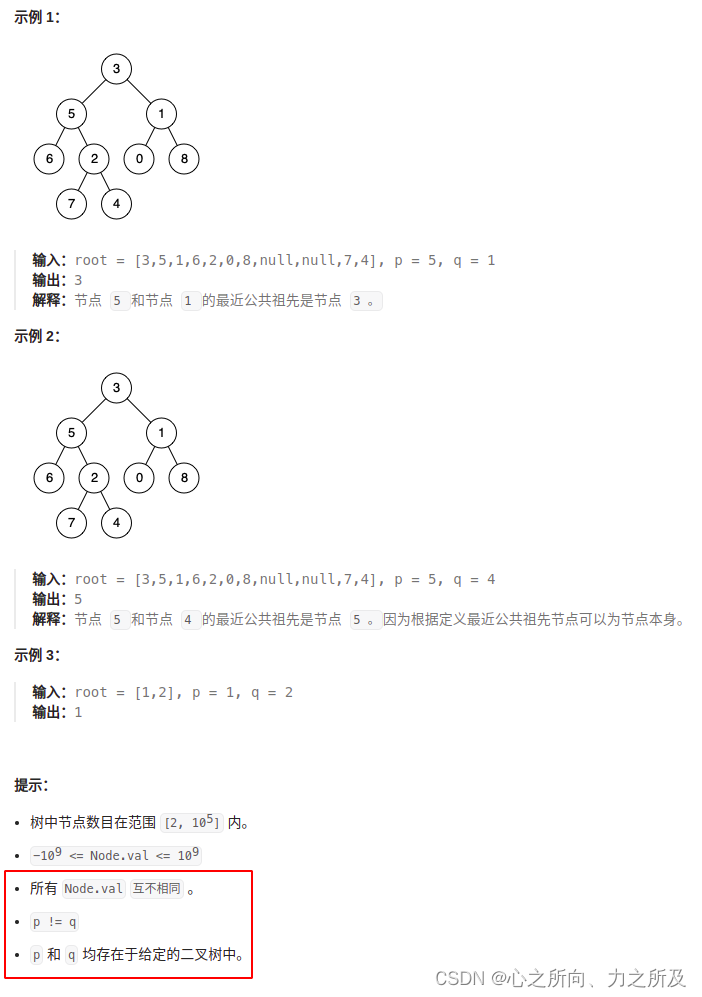
LeetCode 刷题 [C++] 第236题.二叉树的最近公共祖先
题目描述 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以…...
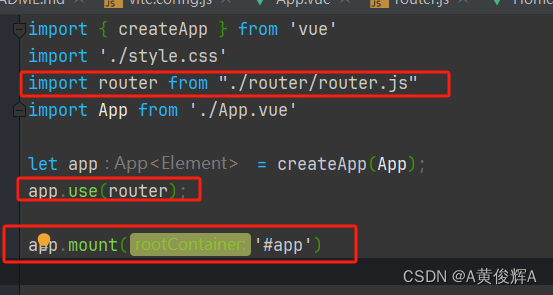
vue3+vite 项目的创建
这里要提醒一下,如果我们要使用 vue3 的组合式api 的写法的话, 那么我们使用的 vue 版本不能低于 vue3.2 版本,不能低于 vue3.2 版本,不能低于 vue3.2 版本 vue2 已停止维护了, 现在全面拥抱vue3 之前用 vue-cli 创建…...
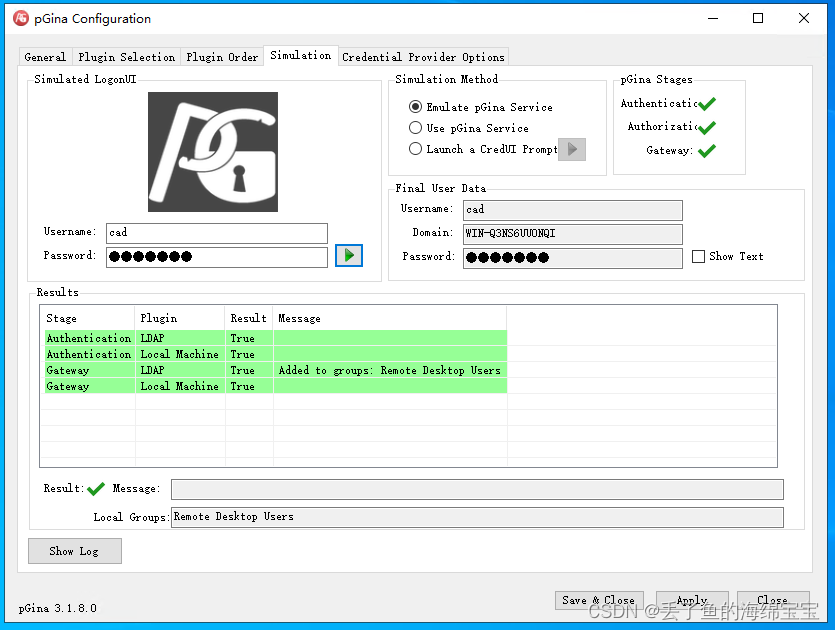
Windows Server 2022 使用ApacheDS用户认证
Windows Server 2022 使用ApacheDS用户认证 参考文档:https://docs.foxpass.com/docs/windows-ldap-auth-with-pgina 安装pGina软件,打开pGina软件 勾选启用LDAP认证,点击Configure 修改LDAP认证信息 点击Gateway,设置只要登…...

【Oracle】Oracle清理日志空间
(一)通过adrci清理日志空间 1.通过find命令查询大数据文件 find / -type f -size 100M 2.登录oracle数据库服务器用户 su - oracle 3.执行故障诊断命令 adrci 4.查询ADR目录 show home 5.切换到对应目录 set homepath diag/rdbms/orcl 6.执行日志清理命令…...

数据抽取平台pydatax介绍--实现和项目使用
数据抽取平台pydatax实现过程中,有2个关键点: 1、是否能在python3中调用执行datax任务,自己测试了一下可以,代码如下: 这个str1就是配置的shell文件 try:result os.popen(str1).read() except Exception as …...
容易发生内存泄漏的八个场景,你都知道吗?
内存泄漏与内存溢出 JVM在运行时会存在大量的对象,一部分对象是长久使用的,一部分对象只会短暂使用 JVM会通过可达性分析算法和一些条件判断对象是否再使用,当对象不再使用时,通过GC将这些对象进行回收,避免资源被用…...

掌握 Vue3 中的 setup 函数
Vue.js 经历了从 Vue 2 到 Vue 3 的重大变革,带来了许多引人注目的新特性和性能优化。其中,setup函数无疑是最引人瞩目的新星之一。 一、概览 setup函数是 Vue 3 引入的一个新的组件选项,作为组合式 API 中心,它允许开发者在一个…...

BUUCTF AWD-Test1
打开靶场是这个有些简陋的界面。 随便点点,找到这个东西。 看到ThinkPHP,思路瞬间清晰,老熟人了。这个就是ThinkPHP漏洞。根据版本我们去找一下poc。 /index.php/?sIndex/\think\View/display&content%22%3C?%3E%3C?php%20phpinfo();…...
百亿诈骗案频出,欧科云链用“技术责任”拓宽Web3安全边界
2022年12月1日,《中华人民共和国反电信网络诈骗法》正式实施,中国正式迈入“全民反诈时代”。据CNNIC和智研咨询统计显示,截至2021年12月,国内网民遭遇网络诈骗比例为16.6%,数千万人深受网络诈骗的危害。 以新兴技术区…...
一个实时波形图的封装demo(QT)(qcustomplot)
前言: 封装的一个实时波形图的类,可以直接提升使用。 提供了接口,可以更改颜色,样式,等等 参考: Qt Plotting Widget QCustomPlot - Introduction 另外参考了一个大神的作品,链接没找到。 项目…...

Java进阶-反射
来学习一下Java的反射,通过Class实例获取class信息的方法称为反射(Reflection),内容如下 一、反射机制 1、概述 在运行状态中,对于任意一个类,都能够知道这个类的所有属性和方法;对于任意一…...
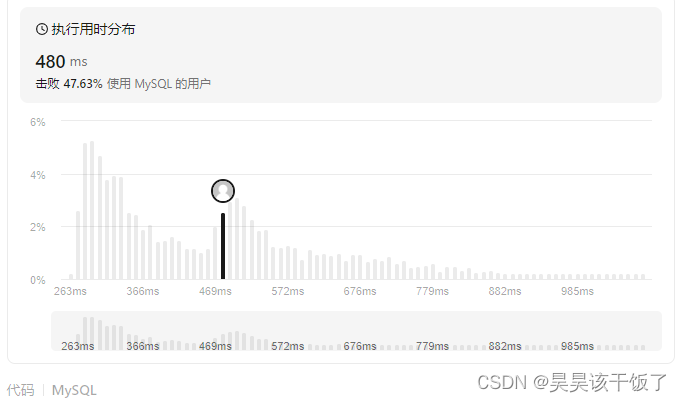
力扣180 连续出现的数字
如何有效地识别在数据库中至少连续出现三次的数字? 目录 题目描述 解题思路 完整代码 进一步探索 题目描述 表:Logs ---------------------- | Column Name | Type | ---------------------- | id | int | | num | varch…...

C++面试 -操作系统-架构能力:内存问题分析与性能优化
内存问题分析: 内存泄漏: 描述什么是内存泄漏,以及它如何在 C 中发生。使用工具(如 Valgrind、AddressSanitizer)来检测和定位内存泄漏。如何预防内存泄漏?使用智能指针、正确释放资源等。 野指针和悬挂指针…...
基于springboot+vue的共享汽车管理系统(前后端分离)
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...
)
All Roads Lead to Rome (30)
1、题目: Indeed there are many different tourist routes from our city to Rome. You are supposed to find your clients the route with the least cost while gaining the most happiness. Input Specification: Each input file contains one test case. For…...

2026高性价比协作工具盘点:如何兼顾文件管理与数据安全?
在2026年的数字化办公时代,企业网盘早已不仅是简单的“存储仓库”,而是团队协作、文件流转和保障数据资产安全的核心基础设施。针对市面上眼花缭乱的产品,企业IT和管理者如何找到匹配业务需求且具备高性价比的云盘方案? 本文将从…...

李佳琦后退,美ONE在赌一场没有“顶流”的未来
超头退潮下,MCN的生死命题。文|段泽钰编|郭梦仪4月8日,李佳琦在直播中宣布“将缺席两个月的直播”。几个小时后,这条消息登上热搜。他不得不紧急澄清:是两个月,不是两个季度,缺席是去…...
:顺序、条件、循环全攻略+人生重开模拟器)
Python第三课: 基础语法(2):顺序、条件、循环全攻略+人生重开模拟器
Python第三课: 基础语法(2):顺序、条件、循环全攻略人生重开模拟器 文章目录Python第三课: 基础语法(2):顺序、条件、循环全攻略人生重开模拟器一、顺序语句:代码从上往下执行二、条件语句&…...

轨迹张量 × 空间反演:三维空间智能体核心算法技术白皮书
《轨迹张量 空间反演:三维空间智能体核心算法技术白皮书》—— 镜像视界(浙江)科技有限公司空间计算引擎体系一、摘要(Abstract)在传统视频智能体系中,AI仅停留在二维图像识别阶段,缺乏真实空间…...

别再死记硬背K和D了!用Python+OpenCV可视化鱼眼畸变,真正看懂参数含义
用PythonOpenCV动态可视化鱼眼畸变:告别枯燥参数,建立直觉理解 鱼眼镜头拍出来的照片总是带着一种夸张的弧形扭曲——边缘的建筑像是被吸进了黑洞,直线变成了曲线。这种独特的视觉效果在摄影创作中很有魅力,但对计算机视觉算法来说…...

Tsuru平台即服务终极指南:成功企业案例深度解析
Tsuru平台即服务终极指南:成功企业案例深度解析 【免费下载链接】tsuru Open source and extensible Platform as a Service (PaaS). 项目地址: https://gitcode.com/gh_mirrors/ts/tsuru Tsuru是一个开源且可扩展的平台即服务(PaaS)解…...

XUpdate自定义主题实战:打造独特版本更新提示界面
XUpdate自定义主题实战:打造独特版本更新提示界面 【免费下载链接】XUpdate 🚀A lightweight, high availability Android version update framework.(一个轻量级、高可用性的Android版本更新框架) 项目地址: https://gitcode.com/gh_mirrors/xu/XUpda…...
)
5分钟搞定敏感词检测:sensitive-word开源工具实战指南(附6W+词库)
5分钟搞定敏感词检测:sensitive-word开源工具实战指南(附6W词库) 在内容安全日益重要的今天,敏感词检测已成为各类应用的标配功能。无论是社交平台的评论审核,还是电商系统的商品描述过滤,甚至是企业内部文…...
)
AI元人文之哲学阐释(2025—2026)
AI元人文之哲学阐释(2025—2026)摘要AI元人文是独立研究者岐金兰(李湖北)于2025至2026年间以人机协作方式建构的一套体系化哲学,旨在回应人工智能引发的根本性存在论、认识论与伦理学挑战。本文系统阐释该理论的演进脉…...

前后端连通性测试以及前端页面总体设计
一、项目核心架构概览先快速梳理项目的核心分层,帮助理解前后端协作的基础:前端:原生 HTML 构建页面结构,CSS 实现视觉样式,JavaScript 处理交互与接口调用;后端:Spring Boot 搭建接口服务&…...