直接修改zynq petalinux编译出来的rootfs.cpio.gz文件内容
xilinx zynq petalinux 默认编译打包出的SPI flash烧写启动文件是BOOT.BIN,然而每次需要修改rootfs内的文件时都要重新build rootfs 然后再 package一次才能生成新的BOOT.bin文件,地球人都知道petalinux编译一次是很耗时间的,那么有没有什么简单的办法能修改rootfs呢?
为了达到这么个目的,我花点时间研究了一下petalinux编译打包过程,执行build命令后最终会生成linux内核,rootfs,dtb,u-boot,fsbl,fpga.bit这些最终文件,然后package时将这些文件一起打包成BOOT.bin才可以烧写spi flash,其中kernel,rootfs,dtb会被预先打包成image.ub文件才会参与到package过程,如果要修改rootfs,可以把image.ub文件解包出rootfs,修改其中的内容,再重新打包成新的rootfs,就可以了,下面过程是经过多次尝试后总结出的步骤,以供参考
首先需要准备 image.ub文件,这个文件在编译完成后自动生成,petalinux2019.2中这个文件在xxxx/images/linux目录下,使用dumpimage命令拆包,如下面的样子,可以解出kernel,设备树文件和rootfs。
dumpimage -i image.ub -T flat_dt -p 0 kernel.bin
dumpimage -i image.ub -T flat_dt -p 1 devicetree.dtb
dumpimage -i image.ub -T flat_dt -p 2 rootfs.cpio.gz第二步,对rootfs解压出原始文件
mkdir ramdisk_unzip
gunzip -c rootfs.cpio.gz | sh -c 'cd ramdisk_unzip/ && cpio -i'经过上面两步骤后就可以在ramdisk_unzip文件夹下看到原始的rootfs目录结构,这个时候就可以对rootfs随意修改了
第三部,修改完成后重新对rootfs再打包成rootfs.cpio.gz,使用如下命令进行打包
sh -c 'cd ramdisk_unzip/ && find . | cpio -H newc -o' | gzip -9 > repack_ramdisk.cpio.gz第4步,重新生成一个新的image.ub文件,使用mkimage命令,如下
mkimage -f package_image_ub.its repack_image.ub其中的package_image_ub.its是告诉mkimage打包需要的参数,这个文件在petalinux编译路径下有模板,我这里复制出petalinux的模板,修改了一下,主要是几个文件路径,改成自己的文件
/dts-v1/;/ {description = "U-Boot fitImage for PetaLinux/4.19-xilinx-v2019.2+git999/plnx-zynq7";#address-cells = <1>;images {kernel@1 {description = "Linux kernel";data = /incbin/("刚才第一步解压出来的kernel.bin文件路径");type = "kernel";arch = "arm";os = "linux";compression = "none";load = <0x8000>;entry = <0x8000>;hash@1 {algo = "sha1";};};fdt@system-top.dtb {description = "Flattened Device Tree blob";data = /incbin/("刚才第一步解压出来的devicetree.dtb文件路径");type = "flat_dt";arch = "arm";compression = "none";hash@1 {algo = "sha1";};};ramdisk@1 {description = "petalinux-user-image";data = /incbin/("重新打包生成的repack_ramdisk.cpio.gz文件路径");type = "ramdisk";arch = "arm";os = "linux";compression = "gzip";hash@1 {algo = "sha1";};};};configurations {default = "conf@system-top.dtb";conf@system-top.dtb {description = "1 Linux kernel, FDT blob, ramdisk";kernel = "kernel@1";fdt = "fdt@system-top.dtb";ramdisk = "ramdisk@1";hash@1 {algo = "sha1";};};};
};第5步,使用原本petalinux自带的package命令重新打包生成BOOT.BIN
petalinux-package --boot --fsbl ./fsbl.elf --fpga --u-boot ./u-boot.elf --kernel ./repack_image.ub -o ./BOOT.BIN --force其中的fsbl,u-boot都是原先build后自动生成的,在xxxx/images/linux路径下就有,经过上面的步骤后就重新生成了烧写文件,理论上烧写到spiflsh就可以正常启动了
简单几步就完成了rootfs的重新修改和配置,想添加删除什么文件比原先的build命令方便多了。
相关文章:

直接修改zynq petalinux编译出来的rootfs.cpio.gz文件内容
xilinx zynq petalinux 默认编译打包出的SPI flash烧写启动文件是BOOT.BIN,然而每次需要修改rootfs内的文件时都要重新build rootfs 然后再 package一次才能生成新的BOOT.bin文件,地球人都知道petalinux编译一次是很耗时间的,那么有没有什么简…...

什么是 Golang 类型断言
类型断言:用于检查某个接口是否包含某个具体类型,语法x.(T),x是一个接口类型表达式,T是具体的类型,如果x包含的值可以被转换成T类型,则是ok 在Go语言中,任何类型的值都属于空接口类型。空接口类…...

mysql数据库root权限读写文件
如果没有shell,只有数据库权限的情况下: 1. udf 提权提示没有目录:使用数据流创建目录 1. select xxx into outfile C:\\phpstudy_pro\\Extensions\\MySQL5.5.29\\lib\::$INDEX_ALLOCATION;2. select xxx into outfile C:\\phpstudy_pro\…...

力扣爆刷第88天之hot100五连刷26-30
力扣爆刷第88天之hot100五连刷26-30 文章目录 力扣爆刷第88天之hot100五连刷26-30一、142. 环形链表 II二、21. 合并两个有序链表三、2. 两数相加四、19. 删除链表的倒数第 N 个结点五、24. 两两交换链表中的节点 一、142. 环形链表 II 题目链接:https://leetcode.…...
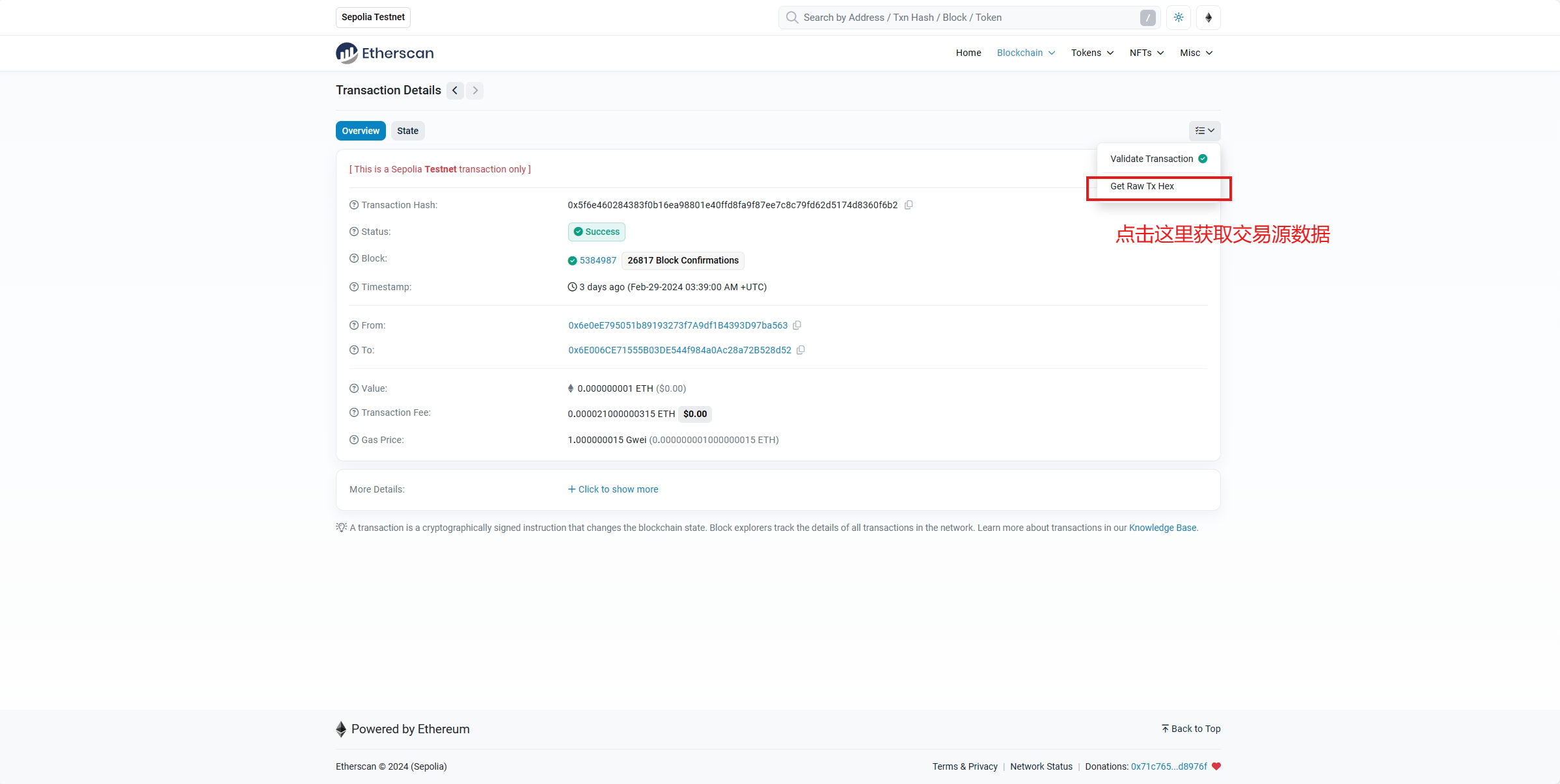
Ethersacn的交易数据是什么样的(2)
分析 Raw Transanction RLP(Recursive Length Prefix)是一种以太坊中用于序列化数据的编码方式。它被用于将各种数据结构转换为二进制格式,以便在以太坊中传输和存储。RLP 是一种递归的编码方式,允许对复杂的数据结构进行编码。所…...

学习Android的第二十二天
目录 Android ContextMenu 上下文菜单 ContextMenu 范例 参考文档 Android SubMenu 子菜单 范例 参考文档 Android PopupMenu 弹出菜单 范例 参考文档 Android ContextMenu 上下文菜单 在Android开发中,ContextMenu(上下文菜单)为…...

JavaScript——流程控制(程序结构)
JavaScript——流程控制(程序结构) 流程控制就是来控制我们的代码按照什么结构顺序来执行。更倾向于一种思想结构。 流程控制分为三大结构:顺序结构、分支结构、循环结构 1、顺序结构 代码从上往下依次执行,从A到B执行&#x…...

如何用ChatGPT+GEE+ENVI+Python进行高光谱,多光谱成像遥感数据处理?
原文链接:如何用ChatGPTGEEENVIPython进行高光谱,多光谱成像遥感数据处理? 第一:遥感科学 从摄影侦察到卫星图像 遥感的基本原理 遥感的典型应用 第二:ChatGPT ChatGPT可以做什么? ChatGPT演示使用 …...

AIGC工具( 7个 )
人工智能技术有好的一方面,又不好的地方,要区别对待,吸取精华,去其糟粕。目前市场上有很多AI大模型,可以支持聊天,写文稿,创作等,部分可以生成图片,以下是7个很不错的免费…...
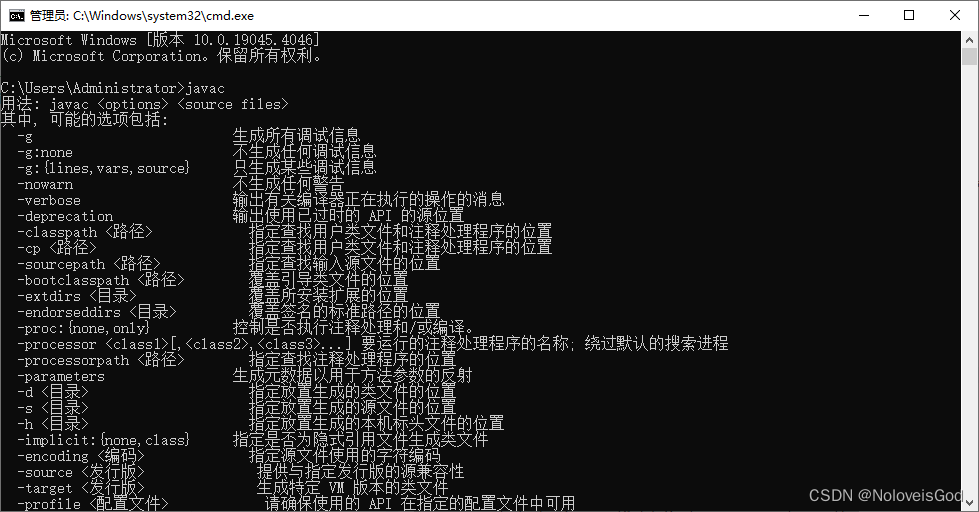
学习Java的第一天
一、Java简介 Java 是由 Sun Microsystems 公司于 1995 年 5 月推出的 Java 面向对象程序设计语言和 Java 平台的总称。由 James Gosling和同事们共同研发,并在 1995 年正式推出。 后来 Sun 公司被 Oracle (甲骨文)公司收购,Jav…...

【设计模式】工厂模式与抽象工厂模式
工厂方法 以图书馆管理系统为例,需要API提供查询不同专业分类的书目列表,一般实现, class LibraryManager { public:LibraryManager() {}//按专业分类查询BookList Query(Type type) {if(type TA) {return ...;} else if (type TB) {} el…...
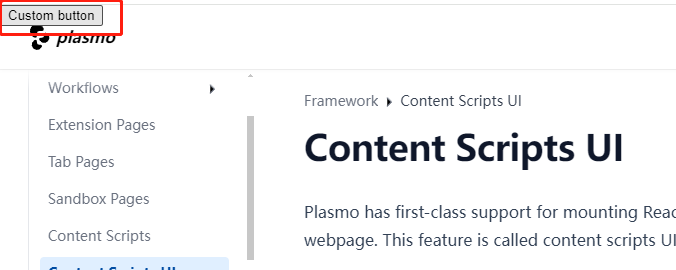
使用plasmo框架开发浏览器插件,注入contents脚本和给页面添加UI组件
plasmo:GitHub - PlasmoHQ/plasmo: 🧩 The Browser Extension Framework plasmo是一个开发浏览器插件的框架,支持使用react和vue等技术,而且不用手动管理manifest.json文件,框架会根据你在框架中的使用,自…...

python并发 惰性处理大型数据集
惰性计算是一种编程策略,它使得程序在何时执行计算的决定推迟到需要结果时才进行。这种策略的好处在于,它允许程序处理大规模数据或者需要大量计算的任务时节省内存和计算资源。 举例来说,当我们调用 Python 中的 range() 函数时,…...
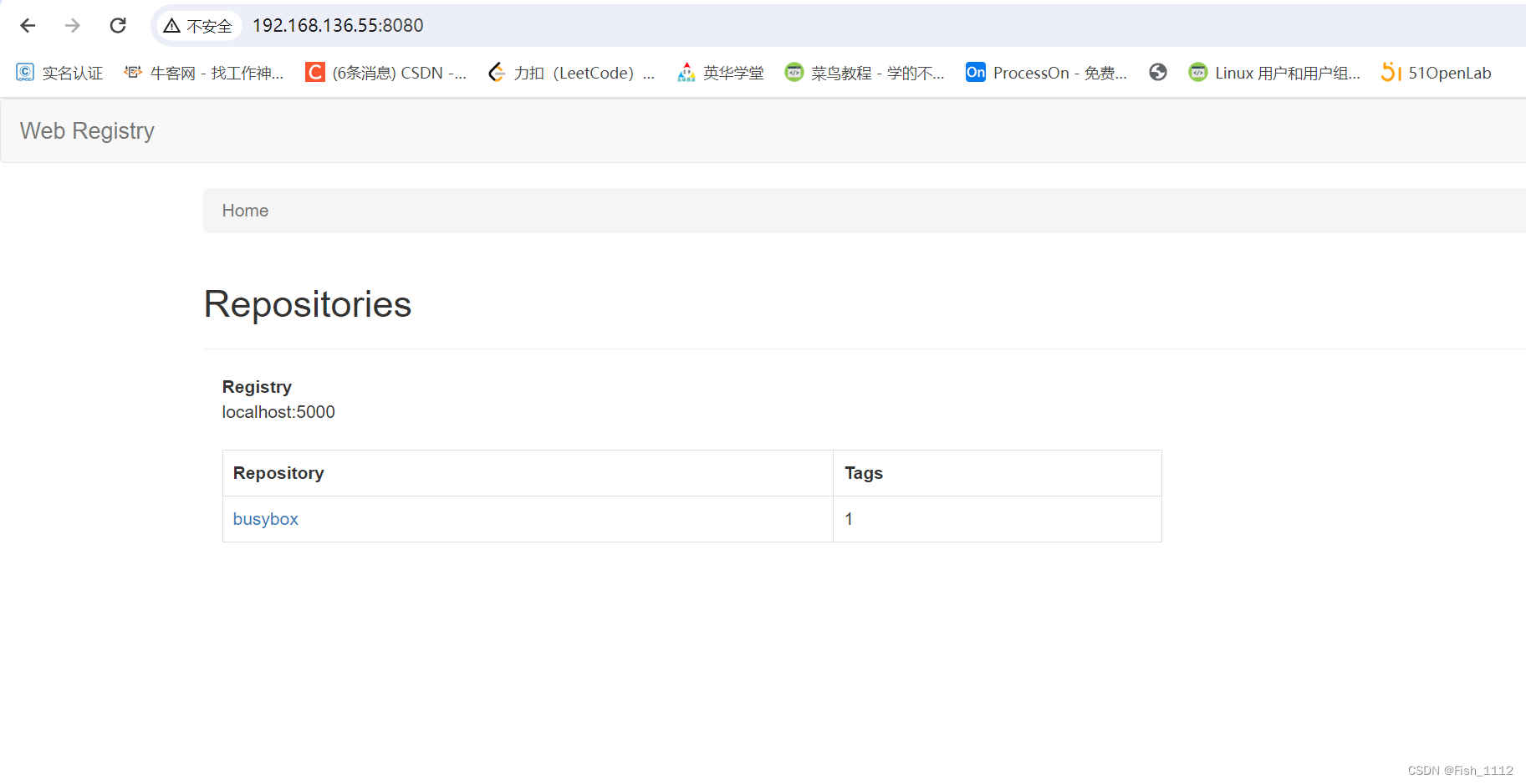
Docker将本地的镜像上传到私有仓库
使用register镜像创建私有仓库 [rootopenEuler-node1 ~]# docker run --restartalways -d -p 5000:5000 -v /opt/data/regostry:/var/lib/registry registry:2[rootopenEuler-node1 ~]# docker images REPOSITORY TAG IMAGE…...
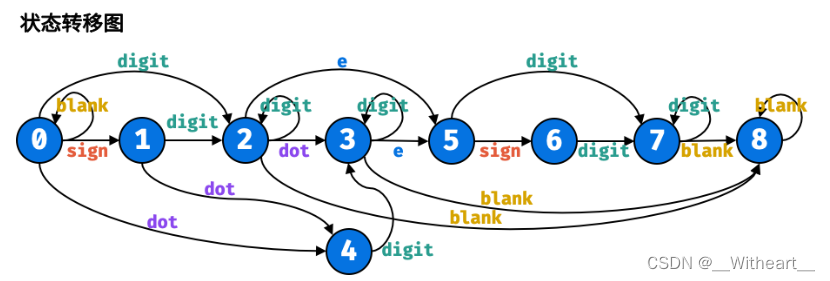
[LeetBook]【学习日记】有效数字——状态机
题目 有效数字 有效数字(按顺序)可以分成以下几个部分: 若干空格一个小数或者整数(可选)一个’e’或’E’,后面跟着一个整数若干空格 小数(按顺序)可以分成以下几个部分:…...

学习目标2024
技术: 什么是 Nacos apifox 业务: 域统一...

引入js,刷新清除缓存
一、这种会让所有的css/js资源重新加载 <meta http-equiv"pragram" content"no-cache"> <meta http-equiv"cache-control" content"no-cache, no-store, must-revalidate">二、加时间戳 每次引入,后面版本号都…...
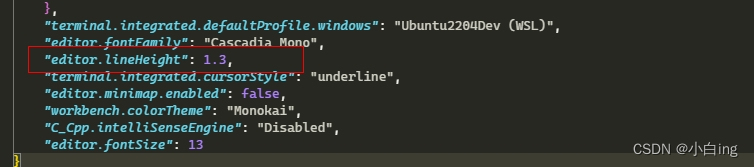
【VSCODE修改代码行间距】解决方案
在我们编码的过程中,由于显示字体和显示器的不同,会需要调整行间距,在vscode默认的选项中没有看到设定行间距的选项,不过,可以手动修改配置档达到目的。 1.打开设置 2.打开配置档,手动进行设定 3.在选项中添…...
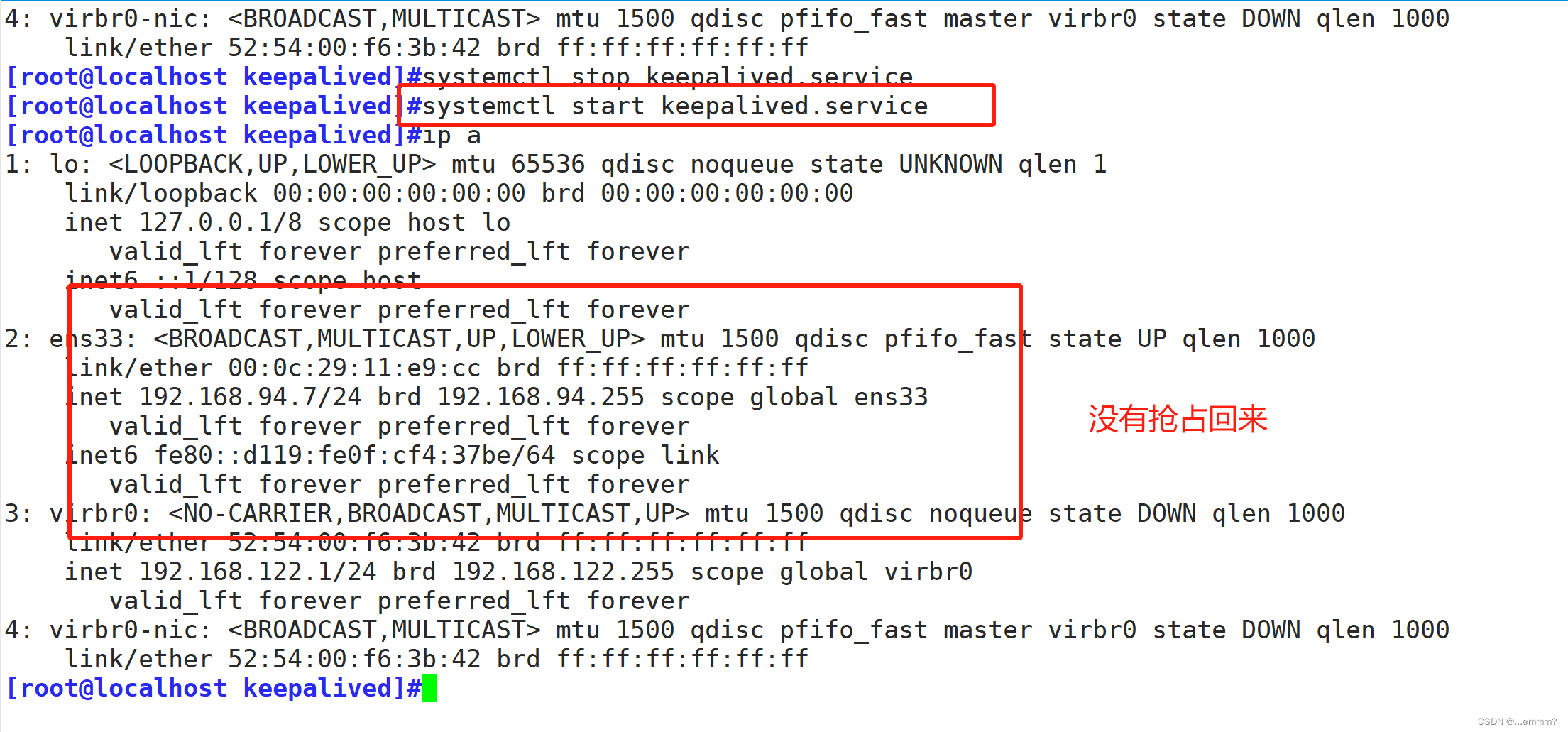
lvs+keepalive
虚拟路由冗余协议(Virtual Router Redundancy Protocol,简称VRRP) VRRP能够在不改变组网的情况下,将多台路由器虚拟成一个虚拟路由器,通过配置虚拟路由器的IP地址为默认网关,实现网关的备份。 协议版本: VRRPv2(常用&…...

用spark读取及存储数据
文章目录 读取数据存储数据 读取数据 data spark.sql("""select * from temp.tables""") data.show(3)# 转成pandas方式 # df data.toPandas() # df.head(3)存储数据 table "temp.new_tables" data.write.format("hive"…...

京东滑块验证码JS逆向实战:从接口分析到轨迹加密
1. 京东滑块验证码逆向分析入门 第一次接触京东滑块验证码逆向时,我也被那一堆加密参数搞得头晕眼花。但经过多次实战后,我发现只要掌握几个关键点,就能轻松破解这个看似复杂的验证系统。滑块验证码的核心逻辑其实很简单:系统通过…...

告别AI效果波动!掌握“输入供给系统“让模型稳定输出,成本可控
文章指出传统AI系统开发路径固定但效果不稳定,核心问题是模型输入供给无序。文章提出Context Engineering(上下文工程)是构建可控输入供给系统的关键,强调其本质是工程链路而非功能模块。文章系统阐述了输入供给系统的四类问题&am…...

量子计算中SIMD编译优化与离子阱架构实践
1. 量子计算中的SIMD编译优化概述量子计算正逐步从理论走向实践,而离子阱架构因其长相干时间和高保真度操作成为当前最有前景的物理实现方案之一。在传统量子编译器中,指令调度往往采用串行执行模式,导致离子传输和量子门操作存在大量等待时间…...

2026年Java面试,不会背这些八股文真不行
Java 面试 Java 作为编程语言中的 NO.1,选择入行做 IT 做编程开发的人,基本都把它作为首选语言,进大厂拿高薪也是大多数小伙伴们的梦想。以前 Java 岗位人才的空缺,而需求量又大,所以这种人才供不应求的现状,就是 Java 工程师的薪…...
)
第七届先进金属材料国际研讨会(AMM 2026)
第七届先进金属材料国际研讨会(AMM 2026) The 7th Intl Conference on Advanced Metallic Materials(AMM 2026) 2026年8月7-9日 中国昆明 📅 重要信息 会议官网:https://www.academicx.org/AMM/2026/ 会议时间:2026年8月7-9日 会议地点…...

基于NirDiamant/agents-towards-production项目:使用RunPod Serverless部署AI智能体实战指南
基于NirDiamant/agents-towards-production项目:使用RunPod Serverless部署AI智能体实战指南 【免费下载链接】agents-towards-production End-to-end, code-first tutorials for building production-grade GenAI agents. From prototype to enterprise deployment…...

百考通AI实践报告:让实习沉淀有迹可循,成长答卷专业呈现
实习实践是连接理论学习与职场实战的桥梁,而一份逻辑清晰、内容详实的实践报告,既是对实习经历的系统复盘,也是个人成长与能力认证的重要载体。然而,许多学生在撰写报告时,常陷入思路混乱、结构松散、重点模糊的困境&a…...

如何用VR-Reversal在普通屏幕上观看VR视频:3分钟免费转换指南
如何用VR-Reversal在普通屏幕上观看VR视频:3分钟免费转换指南 【免费下载链接】VR-reversal VR-Reversal - Player for conversion of 3D video to 2D with optional saving of head tracking data and rendering out of 2D copies. 项目地址: https://gitcode.co…...

图像超分新SOTA:DAT模型凭什么在效果和效率上双赢?深入对比SwinIR、EDSR等经典方案
DAT模型:图像超分辨率领域的效率与效果平衡术 当一张模糊的老照片在算法处理后突然变得清晰可辨时,这种"魔法"背后是图像超分辨率技术的精妙演化。在这个领域,Transformer架构近年来展现出惊人的潜力,却也面临着计算复…...

【SRC漏洞挖掘系列】第02期:XSS与CSRF——Web世界的“偷家”艺术
上期回顾:我们扒光了目标的资产(情报收集)。本期开始,我们要对这些目标进行“物理超度”——哦不,是合法的安全测试。今天的主角是 Web 漏洞界的“哼哈二将”:XSS 和 CSRF。一、为什么这俩货这么重要&…...