3588板子部署yoloV5
一 :准备 ubuntu linux X86_64系统
a.安装anaconda
b.创建虚拟环境 python=3.8
二: 下载rknn-toolkit2
传送门
unzip 解压文件夹
三:pt转onnx模型

四:onnx转rknn模型

a:cd到rknn-toolkit2-master/rknn-toolkit2/packages目录下
cp表示python的版本号 如果不知道版本的话 输入python __version
b: pip install -r requirements_cp38-1.6.0.txt 安装环境
c: pip install rknn_toolkit2-1.4.0_22dcfef4-cp38-cp38-linux_x86_64.whl
d: from rknn.api import RKNN 如果不报错则安装成功
e: 去到knn-toolkit2-master/rknn-toolkit2/examples/onnx/yolov5目录下修改test.py
修改成自己的


f: 修改后 运行pyhton test.py 根目录会生成 .rknn的模型以及result.jpg


五:3588部署
获取瑞星微官网 rknpu
传送门
在model目录下放入推理视频h264或h265格式
./rknn_yolov5_video_demo ./model/RK3588/yolov5n_result.rknn ./model/a.mp4 264或265至此推理结束
==================================24.3.7更新============================
修改了rknn_yolov5_demo读取视频操作
// Copyright (c) 2021 by Rockchip Electronics Co., Ltd. All Rights Reserved.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License./*-------------------------------------------Includes
-------------------------------------------*/
#include <dlfcn.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/time.h>#define _BASETSD_H#include "RgaUtils.h"#include "postprocess.h"#include "rknn_api.h"
#include "preprocess.h"#define PERF_WITH_POST 1
/*-------------------------------------------Functions
-------------------------------------------*/static void dump_tensor_attr(rknn_tensor_attr *attr)
{std::string shape_str = attr->n_dims < 1 ? "" : std::to_string(attr->dims[0]);for (int i = 1; i < attr->n_dims; ++i){shape_str += ", " + std::to_string(attr->dims[i]);}printf(" index=%d, name=%s, n_dims=%d, dims=[%s], n_elems=%d, size=%d, w_stride = %d, size_with_stride=%d, fmt=%s, ""type=%s, qnt_type=%s, ""zp=%d, scale=%f\n",attr->index, attr->name, attr->n_dims, shape_str.c_str(), attr->n_elems, attr->size, attr->w_stride,attr->size_with_stride, get_format_string(attr->fmt), get_type_string(attr->type),get_qnt_type_string(attr->qnt_type), attr->zp, attr->scale);
}double __get_us(struct timeval t) { return (t.tv_sec * 1000000 + t.tv_usec); }static unsigned char *load_data(FILE *fp, size_t ofst, size_t sz)
{unsigned char *data;int ret;data = NULL;if (NULL == fp){return NULL;}ret = fseek(fp, ofst, SEEK_SET);if (ret != 0){printf("blob seek failure.\n");return NULL;}data = (unsigned char *)malloc(sz);if (data == NULL){printf("buffer malloc failure.\n");return NULL;}ret = fread(data, 1, sz, fp);return data;
}static unsigned char *load_model(const char *filename, int *model_size)
{FILE *fp;unsigned char *data;fp = fopen(filename, "rb");if (NULL == fp){printf("Open file %s failed.\n", filename);return NULL;}fseek(fp, 0, SEEK_END);int size = ftell(fp);data = load_data(fp, 0, size);fclose(fp);*model_size = size;return data;
}static int saveFloat(const char *file_name, float *output, int element_size)
{FILE *fp;fp = fopen(file_name, "w");for (int i = 0; i < element_size; i++){fprintf(fp, "%.6f\n", output[i]);}fclose(fp);return 0;
}/*-------------------------------------------Main Functions
-------------------------------------------*/
int main(int argc, char **argv)
{if (argc < 2){printf("Usage: %s <rknn model> <input_image_path> <resize/letterbox> <output_image_path>\n", argv[0]);return -1;}int ret;rknn_context ctx;size_t actual_size = 0;int img_width = 0;int img_height = 0;int img_channel = 0;const float nms_threshold = NMS_THRESH; // 默认的NMS阈值const float box_conf_threshold = BOX_THRESH; // 默认的置信度阈值struct timeval start_time, stop_time;char *model_name = (char *)argv[1];//char *input_path = argv[2];std::string option = "letterbox";std::string out_path = "./out.jpg";if (argc >= 4){option = argv[3];}if (argc >= 5){out_path = argv[4];}// init rga contextrga_buffer_t src;rga_buffer_t dst;memset(&src, 0, sizeof(src));memset(&dst, 0, sizeof(dst));printf("post process config: box_conf_threshold = %.2f, nms_threshold = %.2f\n", box_conf_threshold, nms_threshold);/* Create the neural network */printf("Loading mode...\n");int model_data_size = 0;unsigned char *model_data = load_model(model_name, &model_data_size);ret = rknn_init(&ctx, model_data, model_data_size, 0, NULL);if (ret < 0){printf("rknn_init error ret=%d\n", ret);return -1;}rknn_sdk_version version;ret = rknn_query(ctx, RKNN_QUERY_SDK_VERSION, &version, sizeof(rknn_sdk_version));if (ret < 0){printf("rknn_init error ret=%d\n", ret);return -1;}printf("sdk version: %s driver version: %s\n", version.api_version, version.drv_version);rknn_input_output_num io_num;ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num));if (ret < 0){printf("rknn_init error ret=%d\n", ret);return -1;}printf("model input num: %d, output num: %d\n", io_num.n_input, io_num.n_output);rknn_tensor_attr input_attrs[io_num.n_input];memset(input_attrs, 0, sizeof(input_attrs));for (int i = 0; i < io_num.n_input; i++){input_attrs[i].index = i;ret = rknn_query(ctx, RKNN_QUERY_INPUT_ATTR, &(input_attrs[i]), sizeof(rknn_tensor_attr));if (ret < 0){printf("rknn_init error ret=%d\n", ret);return -1;}dump_tensor_attr(&(input_attrs[i]));}rknn_tensor_attr output_attrs[io_num.n_output];memset(output_attrs, 0, sizeof(output_attrs));for (int i = 0; i < io_num.n_output; i++){output_attrs[i].index = i;ret = rknn_query(ctx, RKNN_QUERY_OUTPUT_ATTR, &(output_attrs[i]), sizeof(rknn_tensor_attr));dump_tensor_attr(&(output_attrs[i]));}int channel = 3;int width = 0;int height = 0;if (input_attrs[0].fmt == RKNN_TENSOR_NCHW){printf("model is NCHW input fmt\n");channel = input_attrs[0].dims[1];height = input_attrs[0].dims[2];width = input_attrs[0].dims[3];}else{printf("model is NHWC input fmt\n");height = input_attrs[0].dims[1];width = input_attrs[0].dims[2];channel = input_attrs[0].dims[3];}printf("model input height=%d, width=%d, channel=%d\n", height, width, channel);rknn_input inputs[1];memset(inputs, 0, sizeof(inputs));inputs[0].index = 0;inputs[0].type = RKNN_TENSOR_UINT8;inputs[0].size = width * height * channel;inputs[0].fmt = RKNN_TENSOR_NHWC;inputs[0].pass_through = 0;// 读取图片//printf("Read %s ...\n", input_path);cv::VideoCapture cap("/home/pi/rknpu2-master/examples/rknn_yolov5_demo/model/sample.mp4");cv::Mat frame;printf("aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa");while(cap.read(frame)){//cv::imshow("frame",frame);cv::Mat orig_img = frame.clone();//cv::Mat orig_img = cv::imread(input_path, 1);if (!orig_img.data){printf("cv::imread fail!\n");return -1;}cv::Mat img;cv::cvtColor(orig_img, img, cv::COLOR_BGR2RGB);img_width = img.cols;img_height = img.rows;printf("img width = %d, img height = %d\n", img_width, img_height);// 指定目标大小和预处理方式,默认使用LetterBox的预处理BOX_RECT pads;memset(&pads, 0, sizeof(BOX_RECT));cv::Size target_size(width, height);cv::Mat resized_img(target_size.height, target_size.width, CV_8UC3);// 计算缩放比例float scale_w = (float)target_size.width / img.cols;float scale_h = (float)target_size.height / img.rows;if (img_width != width || img_height != height){// 直接缩放采用RGA加速if (option == "resize"){printf("resize image by rga\n");ret = resize_rga(src, dst, img, resized_img, target_size);if (ret != 0){fprintf(stderr, "resize with rga error\n");return -1;}// 保存预处理图片cv::imwrite("resize_input.jpg", resized_img);}else if (option == "letterbox"){printf("resize image with letterbox\n");float min_scale = std::min(scale_w, scale_h);scale_w = min_scale;scale_h = min_scale;letterbox(img, resized_img, pads, min_scale, target_size);// 保存预处理图片cv::imwrite("letterbox_input.jpg", resized_img);}else{fprintf(stderr, "Invalid resize option. Use 'resize' or 'letterbox'.\n");return -1;}inputs[0].buf = resized_img.data;}else{inputs[0].buf = img.data;}gettimeofday(&start_time, NULL);rknn_inputs_set(ctx, io_num.n_input, inputs);rknn_output outputs[io_num.n_output];memset(outputs, 0, sizeof(outputs));for (int i = 0; i < io_num.n_output; i++){outputs[i].want_float = 0;}// 执行推理ret = rknn_run(ctx, NULL);ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL);gettimeofday(&stop_time, NULL);printf("once run use %f ms\n", (__get_us(stop_time) - __get_us(start_time)) / 1000);// 后处理detect_result_group_t detect_result_group;std::vector<float> out_scales;std::vector<int32_t> out_zps;for (int i = 0; i < io_num.n_output; ++i){out_scales.push_back(output_attrs[i].scale);out_zps.push_back(output_attrs[i].zp);}post_process((int8_t *)outputs[0].buf, (int8_t *)outputs[1].buf, (int8_t *)outputs[2].buf, height, width,box_conf_threshold, nms_threshold, pads, scale_w, scale_h, out_zps, out_scales, &detect_result_group);// 画框和概率char text[256];for (int i = 0; i < detect_result_group.count; i++){detect_result_t *det_result = &(detect_result_group.results[i]);sprintf(text, "%s %.1f%%", det_result->name, det_result->prop * 100);printf("%s @ (%d %d %d %d) %f\n", det_result->name, det_result->box.left, det_result->box.top,det_result->box.right, det_result->box.bottom, det_result->prop);int x1 = det_result->box.left;int y1 = det_result->box.top;int x2 = det_result->box.right;int y2 = det_result->box.bottom;rectangle(orig_img, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(256, 0, 0, 256), 3);putText(orig_img, text, cv::Point(x1, y1 + 12), cv::FONT_HERSHEY_SIMPLEX, 0.4, cv::Scalar(255, 255, 255));}printf("save detect result to %s\n", out_path.c_str());imwrite(out_path, orig_img);imshow("aaa",orig_img);cv::waitKey(1);ret = rknn_outputs_release(ctx, io_num.n_output, outputs);// 耗时统计//int test_count = 10;//gettimeofday(&start_time, NULL);//for (int i = 0; i < test_count; ++i)//{//rknn_inputs_set(ctx, io_num.n_input, inputs);// ret = rknn_run(ctx, NULL);// ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL);
//#if PERF_WITH_POST// post_process((int8_t *)outputs[0].buf, (int8_t *)outputs[1].buf, (int8_t *)outputs[2].buf, height, width,// box_conf_threshold, nms_threshold, pads, scale_w, scale_h, out_zps, out_scales, &detect_result_group);
//#endif// ret = rknn_outputs_release(ctx, io_num.n_output, outputs);//}//gettimeofday(&stop_time, NULL);//printf("loop count = %d , average run %f ms\n", test_count,// (__get_us(stop_time) - __get_us(start_time)) / 1000.0 / test_count);//deinitPostProcess();// release//ret = rknn_destroy(ctx);// if (model_data)// {// free(model_data);//}}return 0;}
相关文章:
3588板子部署yoloV5
一 :准备 ubuntu linux X86_64系统 a.安装anaconda b.创建虚拟环境 python3.8 二: 下载rknn-toolkit2 传送门 unzip 解压文件夹 三:pt转onnx模型 四:onnx转rknn模型 a:cd到rknn-toolkit2-master/rknn-toolkit2/packag…...
)
解决GitHub提交时不显示自己的头像 显示另一个账号(其实也是自己)
git show 看看是否是自己的githup 账号的邮箱 如果不是进行下列操作 git config user.email “你的邮箱地址”,修改邮箱 修改完以后输入git config user.email 检查是否修改成了你的邮箱 如果你想其他项目提交时,也避免此类情况,把上面的两条命令改成 (1&#…...

VUE_vue2/3点击区域外触发方法,点击除某个元素触发监听
Vue2 1、自定义指令 // 自定义指令,用于处理点击外部区域的事件 const clickOutside {bind(el, binding) {// 在元素上绑定一个点击事件监听器el.clickOutsideEvent function (event) {// 检查点击事件是否发生在元素的内部if (!(el event.target || el.contai…...
SpringCloud(20)之Skywalking Agent原理剖析
一、Agent原理剖析 使用Skywalking的时候,并没有修改程序中任何一行 Java 代码,这里便使用到了 Java Agent 技术,我 们接下来展开对Java Agent 技术的学习。 1.1 Java Agent Java Agent 是从 JDK1.5 开始引入的,算是一个比较老的…...
容器(0)-DOCKERFILE-安装-常用命令-部署-迁移备份-仓库
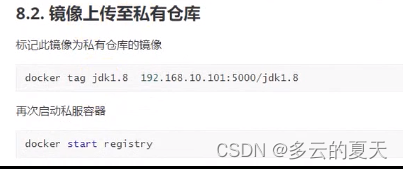
1.安装 启动 systemclt start docker //启动 systemctl status docker //状态 docker info systemclt stop docker systemctl status docker systemctl enable docker //开机启动 2.常用命令 镜像查看 docker images 镜像查看 docker status 镜像拉取 docker pull centos:…...
低功耗DC-DC电压调整器IU5528D
IU5528D是一款超微小型,超低功耗,高效率,升降压一体DC-DC调整器。适用于双节,三节干电池或者单节锂电池的应用场景。可以有效的延长电池的使用时间。IU5528D由电流模PWM控制环路,误差放大器,比较器和功率开关等模块组成。该芯片可在较宽负载范围内高效稳…...

【备战蓝桥杯系列】单源最短路径Dijkstra算法模板
Dijkstra算法模板 蓝桥杯中也是会考到图论最短路的,一旦考到,基本是不会太难的,只要知道板子就基本能拿分了。 两个板子如下 朴素Dijkstra算法 适应情况:稠密图,正权边 时间复杂度 O(n^2 m) int dijkst(){memse…...
嵌入式系统中端口号的理解与分析
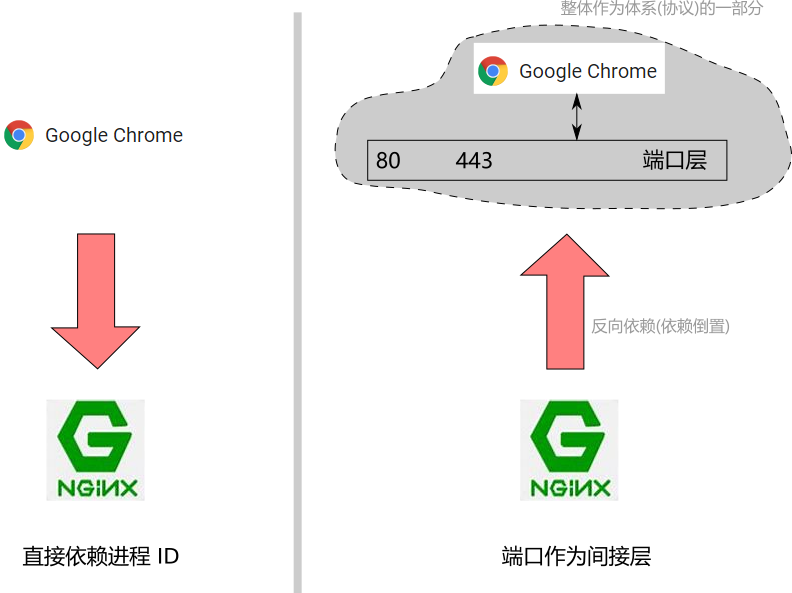
每当看到有人的简历上写着熟悉 tcp/ip, http 等协议时, 我就忍不住问问他们: 你给我说说, 端口是啥吧! 可惜, 很少有人能说得让人满意... 所以这次就来谈谈端口(port), 这个熟悉的陌生人. 在此过程中, 还会谈谈间接层, naming service 等概念, IoC, 依赖倒置等原则以及 TCP 协议…...
3.自定义工程目录配置CMakeLists
问题背景 熟悉stm32keil开发的都知道,我们在编写不同的外设时,通常都会单独编写一个app文件夹或者是user文件夹之类的来存放不同外设功能的源文件和头文件。 在前面一节2.构建第一个工程并烧录到ESP32开发板-CSDN博客中,我们是使用了一个乐鑫…...

Vue3.0里为什么要用 Proxy API 替代 defineProperty API
一、Object.defineProperty 定义:Object.defineProperty() 方法会直接在一个对象上定义一个新属性,或者修改一个对象的现有属性,并返回此对象 为什么能实现响应式 通过defineProperty 两个属性,get及set get 属性的 getter 函…...
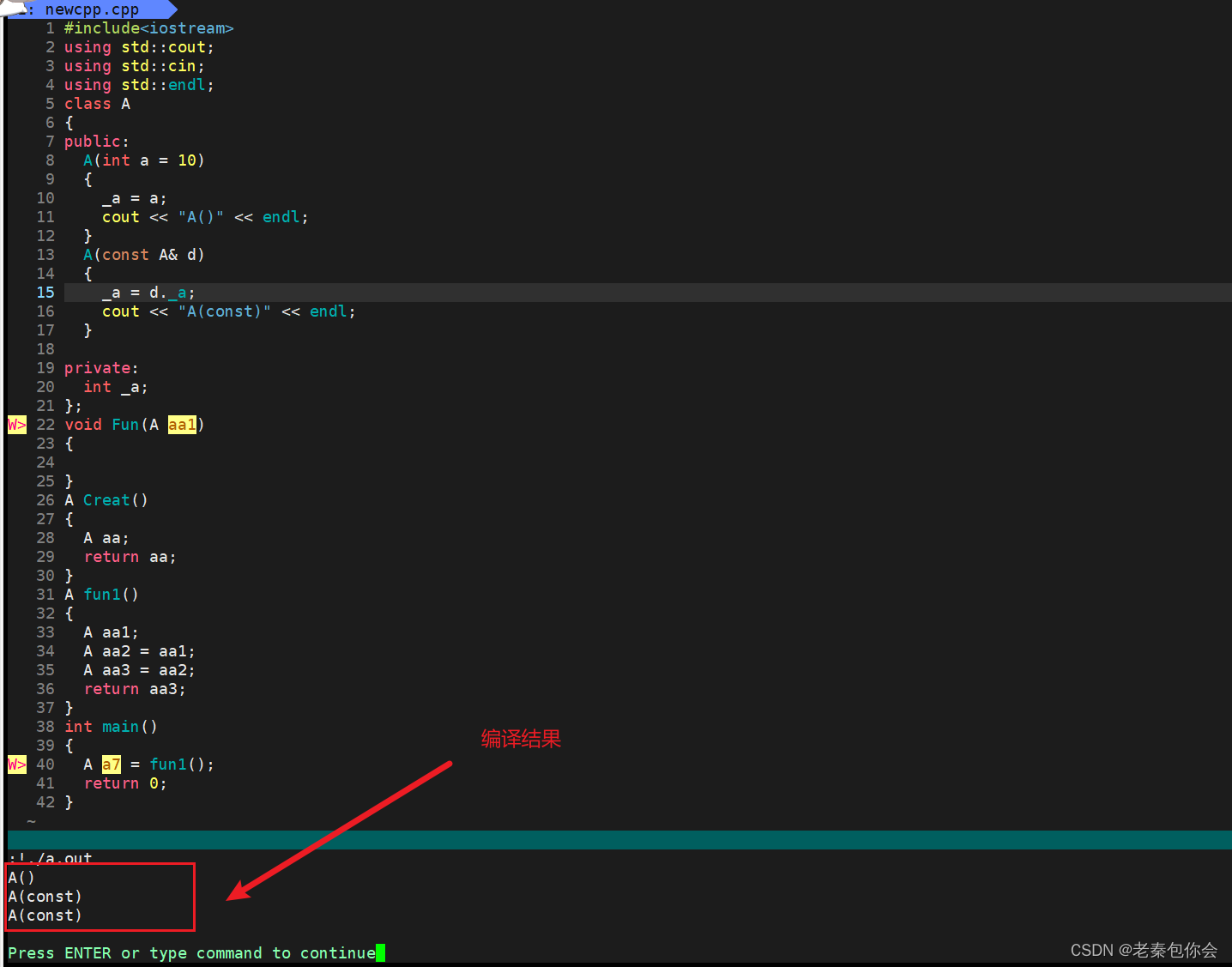
c++初阶------类和对象(下)
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…...

PMP考试:如何高效学习PMBOK?
PMBOK(项目管理知识体系指南)是PMP考试的核心教材,学习PMBOK对于备考PMP考试至关重要。那么我将分享一些高效学习PMBOK的方法和技巧,帮助同学们更好地掌握项目管理知识。 一、制定学习计划 在学习PMBOK之前,制定一个详…...
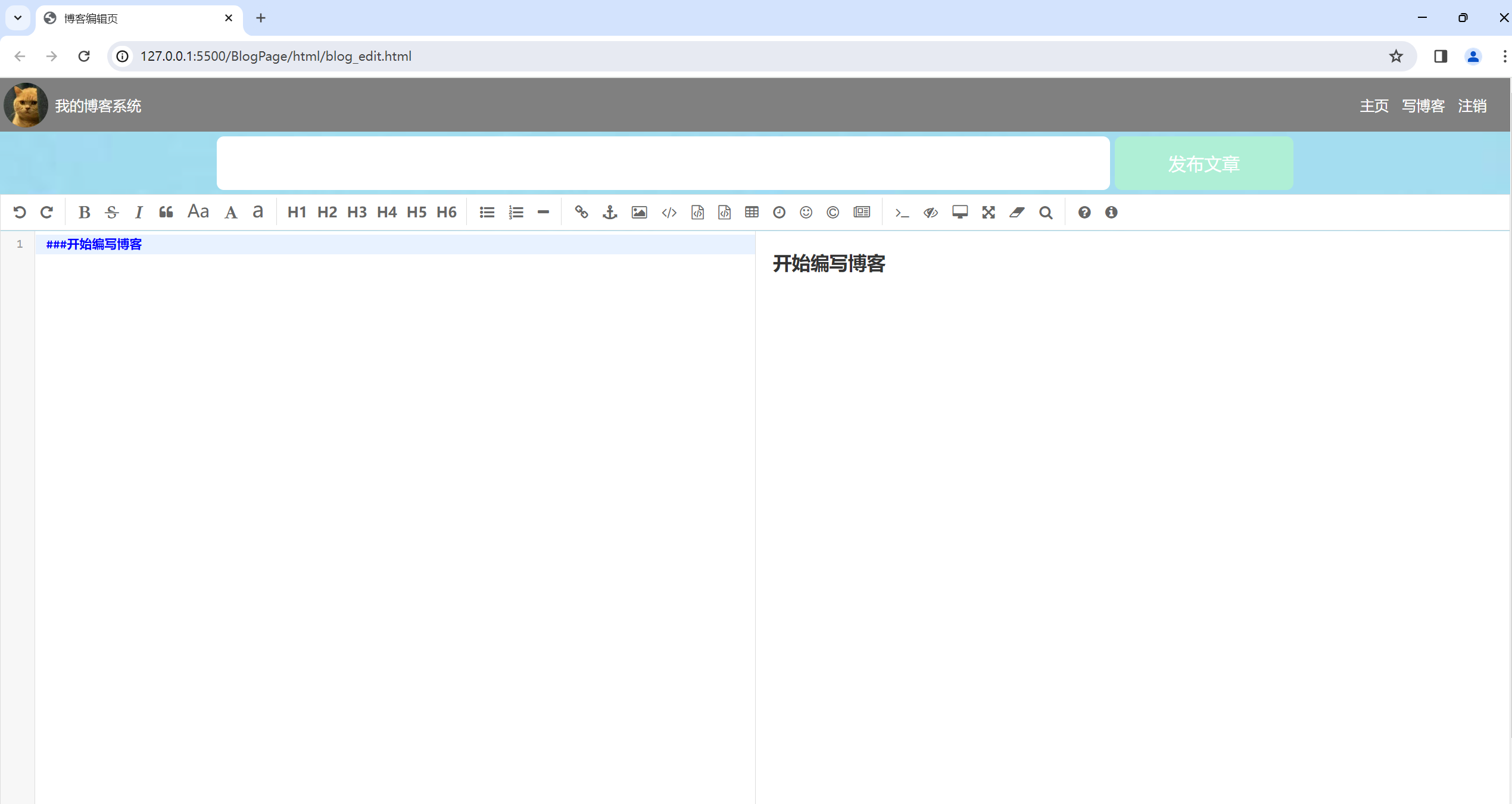
个人博客网站前端页面的实现
博客网站前端页面的实现 博客登录页 相关代码 login.html <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><…...

Kotlin Retrofit 网络请求
一、添加依赖: //Retrofit 网络请求implementation("com.squareup.retrofit2:retrofit:2.3.0")implementation("com.squareup.retrofit2:converter-gson:2.3.0")//json转换 二、创建单例类: package com.example.buju.httpimport …...

pyside6 pytq PyDracula QVideoWidget视频只有声音没有画面
解决方案: 先不使用框架,纯pyside6代码,如果添加视频有画面有声音,那可以排除是硬件问题,如果没有画面只有声音,可能是视频解码器无法解码,换个格式的视频文件如果只有使用PyDracula 出问题&am…...

Python爬网页,不确定网页的编码,不需要用第三方库
Python爬网页,不确定网页的编码,不需要用第三方库,自己写个判断,乱拳打死老师傅 detect试了,不好用 apparent_encoding试了,不好用 encoding试了,不好用 headers里get试了,不好用…...

Web测试的基础流程(外加测试过程需要的注意5点)
前言 在Web工程过程中,基于Web系统的测试、确认和验收是一项重要而富有挑战性的工作。基于Web的系统测试与传统的软件测试不同,它不但需要检查和验证是否按照设计的要求运行,而且还要测试系统在不同用户的浏览器端的显示是否合适。 重要的是…...

项目解决方案:视频监控接入和录像系统设计方案(下)
目 录 1.概述 2. 建设目标及需求 2.1建设总目标 2.2 需求描述 2.3 需求分析 3.设计依据与设计原则 3.1设计依据 3.2 设计原则 4.建设方案设计 4.1系统方案设计 4.2组网说明 5.产品介绍 5.1视频监控综合资源管理平台介绍 5.2视频录像服务器和存储 5.2.…...

Python爬虫-使用Prefect框架实现一个可视化爬虫项目
前言 本文是该专栏的第19篇,后面会持续分享python爬虫干货知识,记得关注。 相信有的同学,在处理爬虫项目的时候,有时也会需要你将爬虫项目进行一个可视化展示,方便管理者能及时详细的了解当前爬虫任务的执行进度以及执行情况,甚至需要做一个爬虫监控预警的可视化任务。 …...

[hive面试真题]-基础理论篇
hive的工作流程 hive中分区表,分桶表 工作中hive分区表的应用示例 发现hive分区中的数据不对怎么处理 hive出现code 1 2 3 什么原因 ,怎么处理 工作中hive常见的文件格式 .压缩格式 工作时常用的hive函数 谈谈对窗口函数的理解 hive中如果出现数据倾斜 ,怎么发现 ,怎么…...

隧道裂缝剥落病害AI识别系统
我国现有公路隧道超2.5万座,总里程超2.8万公里,其中运营超过15年的老旧隧道占比达35%。据交通运输部2025年统计,年均因隧道结构病害导致的交通中断超1200次,直接经济损失超45亿元。传统检测模式暴露四大核心痛点:检测周…...

高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析
高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析 【免费下载链接】srs-windows 项目地址: https://gitcode.com/gh_mirrors/sr/srs-windows 在Windows平台上构建专业级流媒体服务系统,需要综合考虑协议兼容性、性能优化和部署架…...

iPaaS 应用场景深度解析:从系统孤岛到数据自由流动的六大实战路径
写在前面 一个企业的数字化程度越高,系统就越多。系统越多,集成问题就越严重。 这不是假设,而是我们在服务客户过程中反复验证的结论——企业数字化转型的瓶颈,往往不在于"造新系统",而在于"连老系统&q…...

【DeepSeek测试用例生成实战指南】:20年QA专家亲授5大高覆盖率生成模式与3个避坑红线
更多请点击: https://codechina.net 第一章:DeepSeek测试用例生成的核心价值与适用边界 DeepSeek系列大模型在代码理解与生成任务中展现出显著的上下文建模能力,其测试用例生成功能并非通用“黑盒测试器”,而是聚焦于**单元级、函…...
)
Python基础语法:生成器 generator(yield)
一、简介根据指定的规则循环生成数据,当条件不成立时则生成数据结束。数据不是一次性全部生成出来,而是使用一个,再生成一个,好处是可以节约大量的内存。就像设计模式中的懒汉式。适合处理大数据或流数。生成器是一种特殊的迭代器…...

[智能体-81]:工程化智能体 = 模型做脑力拆解 + 框架做流程落地。前者是决策者,后者是管理者,tools/function call是内部员工;mcp server是外部资源;
一、全角色人设 & 对应技术组件角色定位对应技术模块核心职责决策者(脑力大脑)大模型 LLM理解目标、任务拆解、逻辑判断、分支决策、内容生成,负责 “想方案、定步骤”管理者(流程总管)智能体编排框架(…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

HDI 高密度互连板阶数的深度理解
一、概述高密度互连板(High Density Interconnector, HDI)是通过激光微孔技术和逐层积层工艺实现高密度布线的印制电路板。其阶数划分是行业内统一的技术标准,核心依据为独立积层压合次数与配套激光盲孔制程次数,而非单面层数或钻…...

AI学习 - 大模型基础入门
AI学习 - 大模型基础入门 从零开始:Ollama 安装 → 本地模型运行 → Python 代码接入 → 理解核心概念 摘要 本文记录了在 Windows 上使用 Ollama 部署本地大模型、并通过 Python 代码接入调用的完整过程。内容涵盖:Ollama 安装与模型拉取、大模型基础概…...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...