第五章 opengl之摄像机
OpenGL
- 摄像机
- 摄像机/观察空间
- Look At矩阵
- 自由移动
- 移动速度
- 视角移动
- 欧拉角
- 鼠标输入
- 缩放
- 补充:摄像机类
摄像机
OpenGL本身没有摄像机(Camera)的概念,但我们可以通过把场景中的所有物体往相反方向移动的方式来模拟出摄像机,产生一种我们在移动的感觉,而不是场景在移动。
摄像机/观察空间
- 首先获取摄像机位置,就是世界空间中的一个指向摄像机位置的向量。
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, 3.0f);
- 摄像机方向
指的是摄像机指向的方向。假如让摄像机指向原点,则用原点向量减去摄像机位置向量,能得到摄像机的指向向量。则可以得到摄像机指向z轴负方向,可以通过交换相减的顺序,得到一个指向摄像机正z轴的方向向量:
glm::vec3 cameraTarget = glm::vec3(0.0f, 0.0f, 0.0f);
glm::vec3 cameraDirection = glm::normalize(cameraPos - cameraTarget);
- 右轴
需要另一个向量叫做右向量,代码摄像机空间的x轴的正方形。
首先需要先定义一个上向量,把上向量和第二步得到的方向向量进行叉乘,可以得到一个同时垂直于两向量的一个向量。则可以得到指向x轴正方向的那个向量:
glm::vec3 up = glm::vec3(0.0f, 1.0f, 0.0f);
glm::vec3 cameraRight = glm::normalize(glm::cross(up, cameraDirection));
- 上轴
当前已经有了x和z轴向量,获取一个指向摄像机的正y轴向量即可。
把右向量和方向向量进行叉乘:
glm::vec3 cameraUp = glm::cross(cameraDirection, cameraRight);
使用这些摄像机向量我们就可以创建一个LookAt矩阵了,它在创建摄像机的时候非常有用。
Look At矩阵
使用矩阵的优点之一是:因为使用了3个相互垂直的轴定义了一个坐标空间。可以用这3个轴外加一个平移向量来创建一个矩阵,可以用这个矩阵乘以任何向量将其变换到那个坐标空间。上述是LookAt的作用。
现在可以通过上面的三个相互垂直的轴,外加一个定义摄像机空间的位置坐标,就可以创建LookAt矩阵:
GLM提供支持,我们只需要定义一个摄像机位置,一个目标位置,一个表示世界空间中的上向量的向量(就说算右向量使用的那个上向量)
glm::mat4 view;
view = glm::lookAt(glm::vec3(0.0f, 0.0f, 3.0f), glm::vec3(0.0f, 0.0f, 0.0f), glm::vec3(0.0f, 1.0f, 0.0f));
glm::LookAt函数需要一个位置、目标和上向量。它会创建一个和在上一节使用的一样的观察矩阵。
举例:让摄像机在场景中旋转,把摄像机的注视点始终保持在(0,0,0)
需要为旋转的那个圆圈,中每一点都创建一个x和z坐标,代表圆圈上的一点,不动y轴。通过重新计算x和z坐标,会遍历圆圈上的所有点。
假设这个圆圈的半径是radius,每次渲染迭代中使用GLFW的glfwGetTime函数重新创建观察矩阵,来扩大这个圆:
float radius = 10.0f;
float camX = sin(glfwGetTime()) * radius;
float camZ = cos(glfwGetTime()) * radius;
glm::mat4 view;
view = glm::lookAt(glm::vec3(camX, 0.0, camZ), glm::vec3(0.0, 0.0, 0.0), glm::vec3(0.0, 1.0, 0.0));
自由移动
实现摄像机的主动且自由的移动。需要设置一个摄像机的系统
先定义摄像机变量:
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, 3.0f);
glm::vec3 cameraFront = glm::vec3(0.0f, 0.0f, -1.0f);
glm::vec3 cameraUp = glm::vec3(0.0f, 1.0f, 0.0f);
LookAt函数如下:
view = glm::lookAt(cameraPos, cameraPos + cameraFront, cameraUp);
我们首先将摄像机位置设置为之前定义的cameraPos。方向是当前的位置加上我们刚刚定义的方向向量。这样能保证无论我们怎么移动,摄像机都会注视着目标方向。让我们摆弄一下这些向量,在按下某些按钮时更新cameraPos向量。
我们已经为GLFW的键盘输入定义过一个processInput函数了,我们来新添加几个需要检查的按键命令:
void processInput(GLFWwindow *window)
{...float cameraSpeed = 0.05f; // adjust accordinglyif (glfwGetKey(window, GLFW_KEY_W) == GLFW_PRESS)cameraPos += cameraSpeed * cameraFront;if (glfwGetKey(window, GLFW_KEY_S) == GLFW_PRESS)cameraPos -= cameraSpeed * cameraFront;if (glfwGetKey(window, GLFW_KEY_A) == GLFW_PRESS)cameraPos -= glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;if (glfwGetKey(window, GLFW_KEY_D) == GLFW_PRESS)cameraPos += glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;
}
当我们按下WASD键的任意一个,摄像机的位置都会相应更新。如果我们希望向前或向后移动,我们就把位置向量加上或减去方向向量。如果我们希望向左右移动,我们使用叉乘来创建一个右向量(Right Vector),并沿着它相应移动就可以了。这样就创建了使用摄像机时熟悉的横移(Strafe)效果。
注:我们对右向量进行了标准化。如果我们没对这个向量进行标准化,最后的叉乘结果会根据cameraFront变量返回大小不同的向量。如果我们不对向量进行标准化,我们就得根据摄像机的朝向不同加速或减速移动了,但如果进行了标准化移动就是匀速的。
移动速度
虽然上述移动速度是个常量,但是根据处理其的能力不同,可能有的用户移动快,有的移动慢。
图形程序和游戏通常会跟踪一个时间差(Deltatime)变量,它储存了渲染上一帧所用的时间。我们把所有速度都去乘以deltaTime值。结果就是,如果我们的deltaTime很大,就意味着上一帧的渲染花费了更多时间,所以这一帧的速度需要变得更高来平衡渲染所花去的时间。使用这种方法时,无论你的电脑快还是慢,摄像机的速度都会相应平衡,这样每个用户的体验就都一样了。
跟踪两个全局变量计算deltaTime:
float deltaTime = 0.0f; // 当前帧与上一帧的时间差
float lastFrame = 0.0f; // 上一帧的时间
在每一帧中我们计算出新的deltaTime以备后用。
float currentFrame = glfwGetTime();
deltaTime = currentFrame - lastFrame;
lastFrame = currentFrame;
计算速度的时候可以将其考虑进去了:
void processInput(GLFWwindow *window)
{float cameraSpeed = 2.5f * deltaTime;...
}
视角移动
为了能够改变视角,我们需要根据鼠标的输入改变cameraFront向量。然而,根据鼠标移动改变方向向量有点复杂,需要一些三角学知识
欧拉角
欧拉角(Euler Angle)是可以表示3D空间中任何旋转的3个值。一共有3种欧拉角:俯仰角(Pitch)、偏航角(Yaw)和滚转角(Roll)
给定一个俯仰角和偏航角,我们可以把它们转换为一个代表新的方向向量的3D向量。俯仰角和偏航角转换为方向向量的处理需要一些三角学知识。
首先,如果在xz平面,向y轴看去,三角形和x/z轴夹角就说俯仰角pitch,可以通过如下函数得到y轴方向的强度(就是长度):
direction.y = sin(glm::radians(pitch)); // 注意我们先把角度转为弧度
当俯仰角改变后,除了y值在变,x和z也在变:
direction.x = cos(glm::radians(pitch));
direction.z = cos(glm::radians(pitch));
下面是找到偏航角的分量:
偏航角就不需要考虑y轴,在一个水平面上,x和z轴。
x分量取决于cos(yaw)的值,z值同样取决于偏航角的sin(yaw)。把这个加到前面的值中,会得到基于俯仰角和偏航角的方向向量:
direction.x = cos(glm::radians(pitch)) * cos(glm::radians(yaw)); // 译注:direction代表摄像机的前轴(Front),这个前轴是和本文第一幅图片的第二个摄像机的方向向量是相反的
direction.y = sin(glm::radians(pitch));
direction.z = cos(glm::radians(pitch)) * sin(glm::radians(yaw));
鼠标输入
偏航角和俯仰角是通过鼠标(或手柄)移动获得的,水平的移动影响偏航角,竖直的移动影响俯仰角。
它的原理就是:
储存上一帧鼠标的位置,在当前帧中我们当前计算鼠标位置与上一帧的位置相差多少。如果水平/竖直差别越大那么俯仰角或偏航角就改变越大,也就是摄像机需要移动更多的距离。
告诉GLFW,它应该隐藏光标,并捕捉(Capture)它。捕捉光标表示的是,如果焦点在你的程序上(即表示你正在操作这个程序,Windows中拥有焦点的程序标题栏通常是有颜色的那个,而失去焦点的程序标题栏则是灰色的),光标应该停留在窗口中(除非程序失去焦点或者退出)。我们可以用一个简单地配置调用来完成:
glfwSetInputMode(window, GLFW_CURSOR, GLFW_CURSOR_DISABLED);
在调用这个函数之后,无论我们怎么去移动鼠标,光标都不会显示了,它也不会离开窗口。对于FPS摄像机系统来说非常完美。
需要让GLFW监听鼠标移动事件。(和键盘输入相似)我们会用一个回调函数来完成,函数的原型如下:
void mouse_callback(GLFWwindow* window, double xpos, double ypos);
这里的xpos和ypos代表当前鼠标的位置。当我们用GLFW注册了回调函数之后,鼠标一移动mouse_callback函数就会被调用:
glfwSetCursorPosCallback(window, mouse_callback);
在最终获取方向向量之前做下面这几步:
- 计算鼠标距上一帧的偏移量。
- 把偏移量添加到摄像机的俯仰角和偏航角中。
- 对偏航角和俯仰角进行最大和最小值的限制。
- 计算方向向量。
计算鼠标自上一帧的偏移量。我们必须先在程序中储存上一帧的鼠标位置,我们把它的初始值设置为屏幕的中心(屏幕的尺寸是800x600):
float lastX = 400, lastY = 300;
然后在鼠标的回调函数中我们计算当前帧和上一帧鼠标位置的偏移量:
float xoffset = xpos - lastX;
float yoffset = lastY - ypos; // 注意这里是相反的,因为y坐标是从底部往顶部依次增大的
lastX = xpos;
lastY = ypos;float sensitivity = 0.05f;
xoffset *= sensitivity;
yoffset *= sensitivity;
注意我们把偏移量乘以了sensitivity(灵敏度)值。如果我们忽略这个值,鼠标移动就会太大了;你可以自己实验一下,找到适合自己的灵敏度值。
接下来我们把偏移量加到全局变量pitch和yaw上:
yaw += xoffset;
pitch += yoffset;
第三步,我们需要给摄像机添加一些限制,这样摄像机就不会发生奇怪的移动了(这样也会避免一些奇怪的问题)。对于俯仰角,要让用户不能看向高于89度的地方(在90度时视角会发生逆转,所以我们把89度作为极限),同样也不允许小于-89度。这样能够保证用户只能看到天空或脚下,但是不能超越这个限制。我们可以在值超过限制的时候将其改为极限值来实现:
if(pitch > 89.0f)pitch = 89.0f;
if(pitch < -89.0f)pitch = -89.0f;
没有给偏航角设置限制,这是因为我们不希望限制用户的水平旋转。当然,给偏航角设置限制也很容易,如果你愿意可以自己实现。
第四也是最后一步,就是通过俯仰角和偏航角来计算以得到真正的方向向量:
glm::vec3 front;
front.x = cos(glm::radians(pitch)) * cos(glm::radians(yaw));
front.y = sin(glm::radians(pitch));
front.z = cos(glm::radians(pitch)) * sin(glm::radians(yaw));
cameraFront = glm::normalize(front);
计算出来的方向向量就会包含根据鼠标移动计算出来的所有旋转了。由于cameraFront向量已经包含在GLM的lookAt函数中,就可以直接运行了。
窗口第一次获取焦点的时候摄像机会突然跳一下。这个问题产生的原因是,在你的鼠标移动进窗口的那一刻,鼠标回调函数就会被调用,这时候的xpos和ypos会等于鼠标刚刚进入屏幕的那个位置。这通常是一个距离屏幕中心很远的地方,因而产生一个很大的偏移量,所以就会跳了。我们可以简单的使用一个bool变量检验我们是否是第一次获取鼠标输入,如果是,那么我们先把鼠标的初始位置更新为xpos和ypos值,这样就能解决这个问题;接下来的鼠标移动就会使用刚进入的鼠标位置坐标来计算偏移量了:
if(firstMouse) // 这个bool变量初始时是设定为true的
{lastX = xpos;lastY = ypos;firstMouse = false;
}
综上代码如下:
void mouse_callback(GLFWwindow* window, double xpos, double ypos)
{if(firstMouse){lastX = xpos;lastY = ypos;firstMouse = false;}float xoffset = xpos - lastX;float yoffset = lastY - ypos; lastX = xpos;lastY = ypos;float sensitivity = 0.05;xoffset *= sensitivity;yoffset *= sensitivity;yaw += xoffset;pitch += yoffset;if(pitch > 89.0f)pitch = 89.0f;if(pitch < -89.0f)pitch = -89.0f;glm::vec3 front;front.x = cos(glm::radians(yaw)) * cos(glm::radians(pitch));front.y = sin(glm::radians(pitch));front.z = sin(glm::radians(yaw)) * cos(glm::radians(pitch));cameraFront = glm::normalize(front);
}
缩放
实现一个缩放接口。视野定义了可以看到的场景有多大范围。当视野变小时,场景投影出来的空间会减小,产生放大的感觉,这个使用鼠标的滚轮来实现。需要一个回调函数:
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset)
{if(fov >= 1.0f && fov <= 45.0f)fov -= yoffset;if(fov <= 1.0f)fov = 1.0f;if(fov >= 45.0f)fov = 45.0f;
}
当滚动鼠标滚轮的时候,yoffset值代表我们竖直滚动的大小。当scroll_callback函数被调用后,我们改变全局变量fov变量的内容。因为45.0f是默认的视野值,我们将会把缩放级别(Zoom Level)限制在1.0f到45.0f。
我们现在在每一帧都必须把透视投影矩阵上传到GPU,但现在使用fov变量作为它的视野:
projection = glm::perspective(glm::radians(fov), 800.0f / 600.0f, 0.1f, 100.0f);
记得注册鼠标滚轮的回调函数:
glfwSetScrollCallback(window, scroll_callback);
补充:摄像机类
可以自行阅读:
#ifndef CAMERA_H
#define CAMERA_H#include <glad/glad.h>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>#include <vector>// Defines several possible options for camera movement. Used as abstraction to stay away from window-system specific input methods
enum Camera_Movement {FORWARD,BACKWARD,LEFT,RIGHT
};// Default camera values
const float YAW = -90.0f;
const float PITCH = 0.0f;
const float SPEED = 2.5f;
const float SENSITIVITY = 0.1f;
const float ZOOM = 45.0f;// An abstract camera class that processes input and calculates the corresponding Euler Angles, Vectors and Matrices for use in OpenGL
class Camera
{
public:// camera Attributesglm::vec3 Position;glm::vec3 Front;glm::vec3 Up;glm::vec3 Right;glm::vec3 WorldUp;// euler Anglesfloat Yaw;float Pitch;// camera optionsfloat MovementSpeed;float MouseSensitivity;float Zoom;// constructor with vectorsCamera(glm::vec3 position = glm::vec3(0.0f, 0.0f, 0.0f), glm::vec3 up = glm::vec3(0.0f, 1.0f, 0.0f), float yaw = YAW, float pitch = PITCH) : Front(glm::vec3(0.0f, 0.0f, -1.0f)), MovementSpeed(SPEED), MouseSensitivity(SENSITIVITY), Zoom(ZOOM){Position = position;WorldUp = up;Yaw = yaw;Pitch = pitch;updateCameraVectors();}// constructor with scalar valuesCamera(float posX, float posY, float posZ, float upX, float upY, float upZ, float yaw, float pitch) : Front(glm::vec3(0.0f, 0.0f, -1.0f)), MovementSpeed(SPEED), MouseSensitivity(SENSITIVITY), Zoom(ZOOM){Position = glm::vec3(posX, posY, posZ);WorldUp = glm::vec3(upX, upY, upZ);Yaw = yaw;Pitch = pitch;updateCameraVectors();}// returns the view matrix calculated using Euler Angles and the LookAt Matrixglm::mat4 GetViewMatrix(){return glm::lookAt(Position, Position + Front, Up);}// processes input received from any keyboard-like input system. Accepts input parameter in the form of camera defined ENUM (to abstract it from windowing systems)void ProcessKeyboard(Camera_Movement direction, float deltaTime){float velocity = MovementSpeed * deltaTime;if (direction == FORWARD)Position += Front * velocity;if (direction == BACKWARD)Position -= Front * velocity;if (direction == LEFT)Position -= Right * velocity;if (direction == RIGHT)Position += Right * velocity;}// processes input received from a mouse input system. Expects the offset value in both the x and y direction.void ProcessMouseMovement(float xoffset, float yoffset, GLboolean constrainPitch = true){xoffset *= MouseSensitivity;yoffset *= MouseSensitivity;Yaw += xoffset;Pitch += yoffset;// make sure that when pitch is out of bounds, screen doesn't get flippedif (constrainPitch){if (Pitch > 89.0f)Pitch = 89.0f;if (Pitch < -89.0f)Pitch = -89.0f;}// update Front, Right and Up Vectors using the updated Euler anglesupdateCameraVectors();}// processes input received from a mouse scroll-wheel event. Only requires input on the vertical wheel-axisvoid ProcessMouseScroll(float yoffset){Zoom -= (float)yoffset;if (Zoom < 1.0f)Zoom = 1.0f;if (Zoom > 45.0f)Zoom = 45.0f;}private:// calculates the front vector from the Camera's (updated) Euler Anglesvoid updateCameraVectors(){// calculate the new Front vectorglm::vec3 front;front.x = cos(glm::radians(Yaw)) * cos(glm::radians(Pitch));front.y = sin(glm::radians(Pitch));front.z = sin(glm::radians(Yaw)) * cos(glm::radians(Pitch));Front = glm::normalize(front);// also re-calculate the Right and Up vectorRight = glm::normalize(glm::cross(Front, WorldUp)); // normalize the vectors, because their length gets closer to 0 the more you look up or down which results in slower movement.Up = glm::normalize(glm::cross(Right, Front));}
};
#endif
相关文章:

第五章 opengl之摄像机
OpenGL摄像机摄像机/观察空间Look At矩阵自由移动移动速度视角移动欧拉角鼠标输入缩放补充:摄像机类摄像机 OpenGL本身没有摄像机(Camera)的概念,但我们可以通过把场景中的所有物体往相反方向移动的方式来模拟出摄像机,产生一种我们在移动的…...
—官方原版)
nginx配置详解(容器、负载)—官方原版
一、概述本指南对nginx进行了基本介绍,并描述了一些 可以用它完成的简单任务。 据推测,nginx已经安装在阅读器的机器上。 本指南描述了如何启动和停止nginx,并重新加载其 配置,解释结构 的配置文件,并描述了如何设置 n…...
2023年中职网络安全竞赛——CMS网站渗透解析
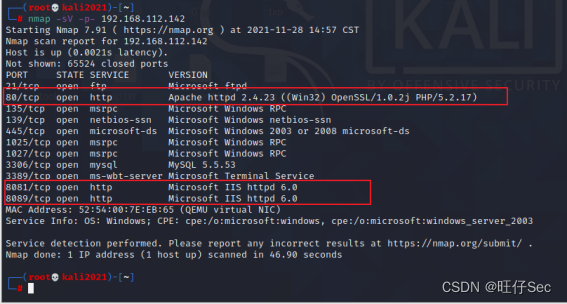
需求环境可私信博主 解析如下: CMS网站渗透 任务环境说明: 服务器场景:Server2206(关闭链接) 服务器场景操作系统:未知 1.使用渗透机对服务器信息收集,并将服务器中网站服务端口号作为flag提交; Flag:8089...
SQL 窗口函数详解
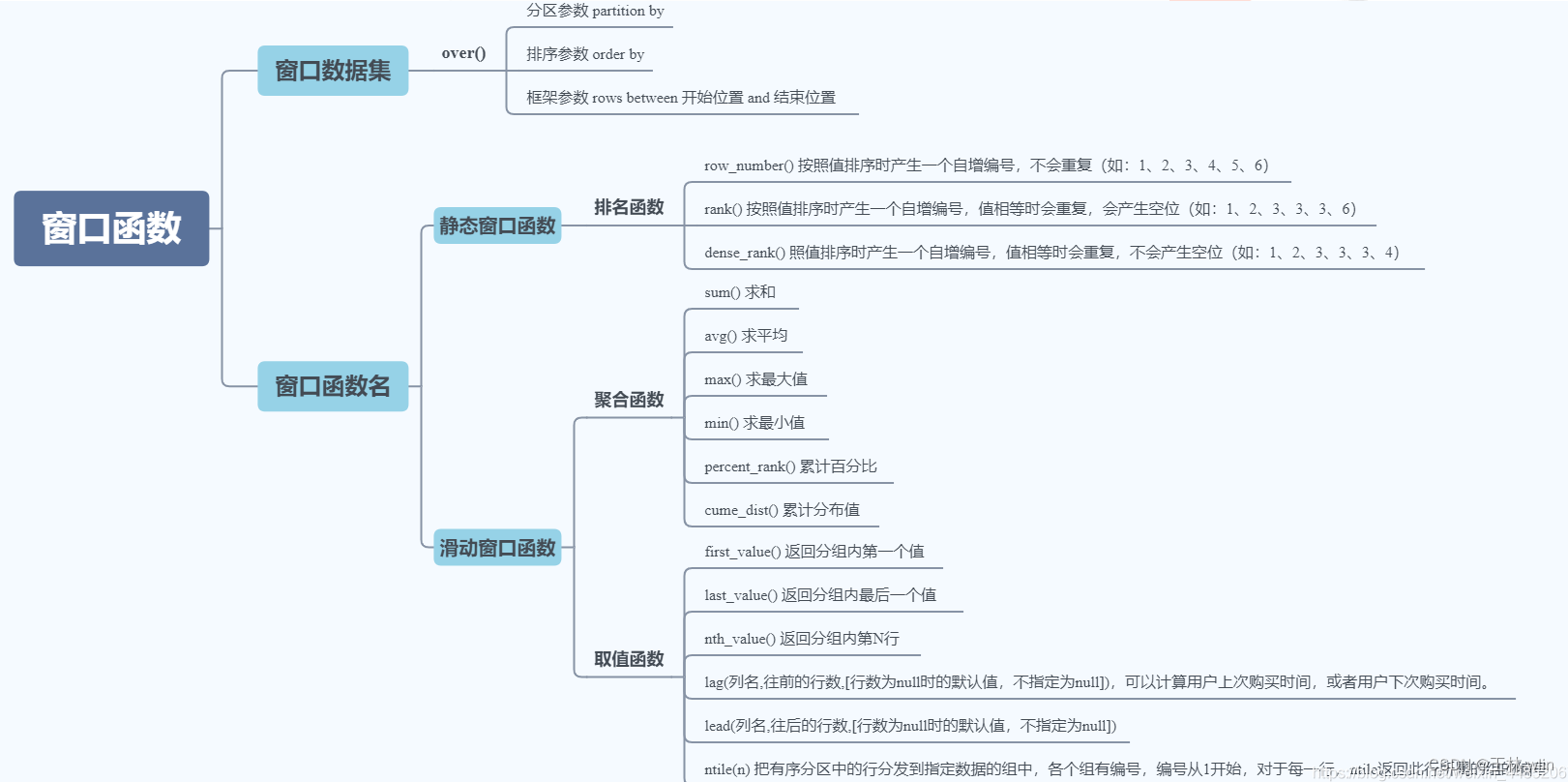
SQL窗口函数详解 窗口函数的主要作用是对数据进行分组排序、求和、求平均值、计数等。 一、窗口函数的基本语法 <分析函数> OVER ([PARTITION BY <列清单>] ORDER BY <排序用列清单> [ROWS BETWEEN 开始位置 AND 结束位置])理解窗口函数的基本语法ÿ…...
显示和隐藏最近任务)
Android 12系统源码_SystemUI(六)显示和隐藏最近任务
前言 Android12对最近任务做了调整,将原本处于SystemUI模块的最近任务转移到了Launcher3QuickStep应用中。 本篇文章我们会结合源码一起来梳理一下最近任务的显示流程。 一、SystemUI模块显示最近任务的相关代码 1、在SystemUI模块调用CommandQueue的showRecentA…...

Docekr三剑客之 Docekr compose
写在前面 Docker三剑客Docker Compose、Docker Machine、Docker Swarm分别是Docker官方开源的三个项目。有着不同的功能: Docker Compose负责实现对 Docker 容器集群的快速编排Docker Machine负责在多种平台上快速安装 Docker 环境Docker Swarm提供 Docker 容器集…...

企业是否具备等保测评资质在哪里查?怎么查?
为了规范等保相关业务办理流程,确保等保业务顺利办理,保障企业合法权益,政策规定,只有取得等保测评资质机构方可办理等保测评业务。因此很多人在问,企业是否具备等保测评资质在哪里查?怎么查? …...

Spacedesk软件推荐,让你的平板也变成电脑的副屏
我的设备: 电脑:戴尔G15 5511、i7-11800H、Windows 11、RTX3060 平板:荣耀V6、麒麟985、安卓10、分辨率2000*1200(手机也行,我用的平板) 实际使用: 先给放一张实际使用的照片 可以让平板变成电脑的副屏…...
Vue 3.0 组合式API 介绍 【Vue3 从零开始】
提示 在阅读文档之前,你应该已经熟悉了这两个 Vue 基础和创建组件。 在 Vue Mastery 上观看关于组合式 API 的免费视频。 通过创建 Vue 组件,我们可以将接口的可重复部分及其功能提取到可重用的代码段中。仅此一项就可以使我们的应用程序在可维护性和…...

【算法数据结构体系篇class13、14】:贪心算法思想
一、贪心算法概念贪心算法概念:1)最自然智慧的算法2)用一种局部最功利的标准,总是做出在当前看来是最好的选择3)难点在于证明局部最功利的标准可以得到全局最优解4)对于贪心算法的学习主要以增加阅历和经验…...

C++知识点,关键字inline ,String,强制类型转化
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练 🔥座右铭:“不要等到什么都没有了,才下定决心去做” 🚀🚀🚀大家觉不错…...

MyBatis源码分析(六)MetaObject工具类的使用与源码分析
文章目录一、MetaObject基本使用二、关键类源码分析1、MetaObject的构造方法2、PropertyTokenizer分词器3、BeanWrapper4、MetaClass5、DefaultReflectorFactory6、Reflector7、总结三、MetaObject的getValue源码分析写在后面一、MetaObject基本使用 public class User {priva…...
文献资源最多的文献下载神器,99.99%的文献都可下载
用对工具事半功倍,查找下载文献用对工具能节约大量的时间和精力去做更多的事情。 文献党下载器(wxdown.org),几乎整合了所有文献数据库资源,涵盖各种文献类型,包含全部学科。文献党下载器整合的资源如&…...
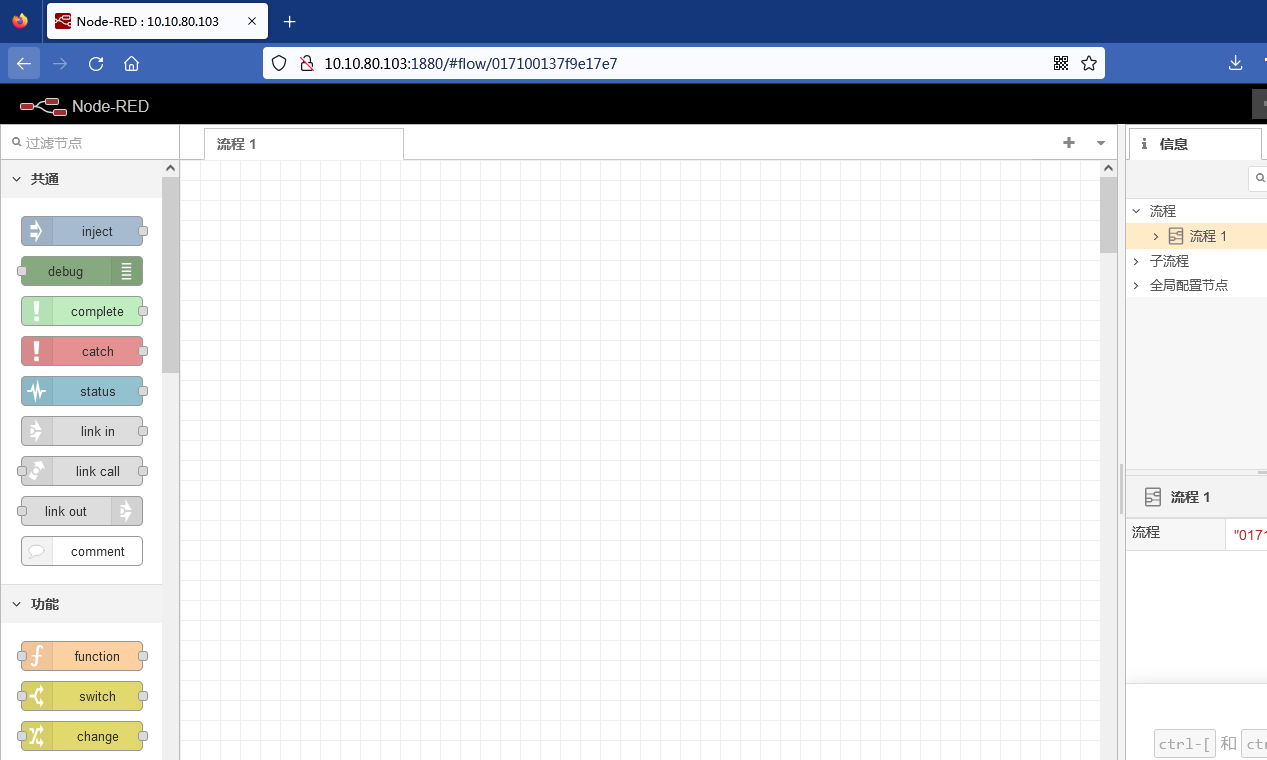
工控机ARM工业边缘计算机搭建Node-Red环境
搭建Node-Red环境Node-RED是一个基于Node.js的开源可视化流程编程环境,可以轻松构建自定义应用程序,通过连接简单的节点来完成复杂的任务。Node-RED提供了一种简单的方法,可以快速连接到外部服务,从而实现物联网应用的开发。Node-…...

位图/布隆过滤器/海量数据处理方式
位图 位图的概念 所谓位图,就是用每一位来存放某种状态,适用于海量数据,数据无重复的场景。通常是用来判断某个数据存不存在的。 直接来看问题: 给40亿个不重复的无符号整数,没排过序。给一个无符号整数࿰…...
Tomcat 配置文件数据库密码加密
几年前研究过Tomcat context.xml 中数据库密码改为密文的内容,因为当时在客户云桌面代码没有留备份也没有文章记录,最近项目又提出了这个需求就又重新拾起来学习一下。在网上找了一些资料,自己也大概试了一下,目前功能是实现了。参…...
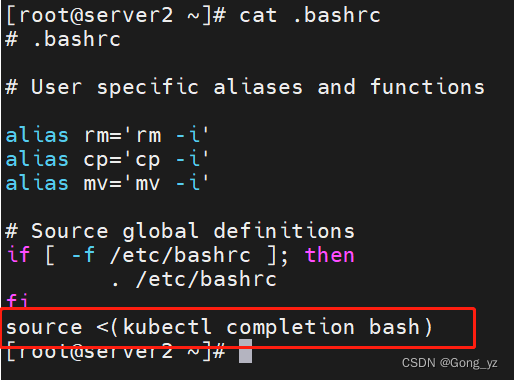
k8s-Kubernetes集群部署
文章目录前言一、Kubernetes简介与架构1.Kubernetes简介2.kubernetes设计架构二、Kubernetes集群部署1.集群环境初始化2.所有节点安装kubeadm3.拉取集群所需镜像3.集群初始化4.安装flannel网络插件5.扩容节点6.设置kubectl命令补齐前言 一、Kubernetes简介与架构 1.Kubernetes…...

Python数据分析案例19——上市银行财务指标对比
我代码栏目都是针对基础的python数据分析人群,比如想写个本科毕业论文,课程论文,做个简单的案例分析等。过去写的案例可能使用了过多的机器学习和深度学习方法,文科的同学看不懂,可能他们仅仅只想用python做个回归或者…...

Python 中错误 ConnectionError: Max retries exceeded with url
出现错误“ConnectionError: Max retries exceeded with url”有多种原因: 向 request.get() 方法传递了不正确或不完整的 URL。我们正受到 API 的速率限制。requests 无法验证您向其发出请求的网站的 SSL 证书。 确保我们指定了正确且完整的 URL 和路径。 # ⛔️…...

SpringBoot下的Spring框架学习(Tedu)——DAY02
SpringBoot下的Spring框架学习(Tedu)——DAY02 目录SpringBoot下的Spring框架学习(Tedu)——DAY02Spring框架学习1.1 Spring介绍1.2 知识铺垫1.2.1 编辑Dog类1.2.2 编辑Cat类1.2.3 编辑测试类User.java1.2.4 上述代码的总结1.3 面…...

RAG系统安全攻防:从PoisonedRAG看检索增强生成的风险与防御
1. 项目概述:当检索增强生成遭遇“毒药”最近在开源社区里,一个名为“PoisonedRAG”的项目引起了我的注意。这个名字本身就充满了戏剧性——“中毒的RAG”。作为一名长期关注大语言模型应用落地的从业者,我立刻意识到,这绝不是一个…...

码农的职业天花板:30岁前必须突破的5个瓶颈
在软件行业的快速迭代浪潮中,软件测试从业者作为质量保障的核心力量,正面临着愈发严峻的职业挑战。30岁,不仅是人生的重要分水岭,更是测试人职业发展的关键节点。如果不能在这个阶段突破潜藏的瓶颈,很可能会陷入“经验…...

Next.js企业级开发样板Next-Enterprise:一站式集成最佳实践与工具链
1. 项目概述:为什么说 Next-Enterprise 是 Next.js 企业级开发的“瑞士军刀”? 如果你正在用 Next.js 构建一个中大型、对代码质量和开发体验有要求的企业级应用,那你大概率遇到过这些头疼事:项目初始化配置繁琐,得花…...
)
人工智能-现代方法(一)
2026.05.12 这几天开始看《人工智能-现代方法》,做一些知识记录。 1、学习的概念:归纳和演绎。(19章) 演绎靠逻辑推理,归纳靠经验总结。所以在前提正确的情况下,演绎的结论必然正确。归纳的结论则有可能出现…...

苹果为何拒绝TD-SCDMA特供版iPhone?复盘技术标准与市场时机的战略博弈
1. 项目概述:一场关于苹果与中国移动的世纪猜想2012年的科技圈,空气中弥漫着一股躁动与期待。几乎所有的行业分析师和手机发烧友都在讨论同一个话题:苹果公司是否会为了全球最大的移动运营商——中国移动,专门推出一款支持TD-SCDM…...

别再为混合仿真发愁了!手把手教你用Cadence AMS搭建Verilog+模拟电路联合仿真环境
混合仿真实战:从零搭建Verilog与模拟电路的联合仿真环境 第一次接触混合仿真的工程师们,往往会在数字与模拟世界的交界处感到迷茫。Verilog的离散事件与SPICE的连续波形如何共存?信号在不同域之间传递时会出现哪些意想不到的问题?…...

Dism++终极指南:5步彻底解决Windows系统卡顿和臃肿问题
Dism终极指南:5步彻底解决Windows系统卡顿和臃肿问题 【免费下载链接】Dism-Multi-language Dism Multi-language Support & BUG Report 项目地址: https://gitcode.com/gh_mirrors/di/Dism-Multi-language 你是否曾为Windows系统越来越慢而烦恼…...

【DeepSeek安全防护权威指南】:20年攻防专家亲授Prompt注入3大高危场景与7层防御体系
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Prompt注入防护的演进与现状 随着 DeepSeek 系列大模型在企业级场景中的深度部署,Prompt 注入攻击已从理论威胁演变为高频真实风险。早期防护策略依赖于简单的关键词过滤和长度截断…...

Kali on WSL避坑大全:从换源、装工具到解决图形界面Terminal报错,一篇搞定
Kali on WSL实战避坑指南:从基础配置到图形界面全流程解决方案 在Windows系统上运行Kali Linux一直是安全研究人员和开发者的刚需,而WSL(Windows Subsystem for Linux)的出现让这一需求变得更加便捷。然而,从安装到真正…...

AI小白必看:手把手教你开发大模型智能体,附收藏指南!
本文深入解析AI Agent(智能体)的核心概念与技术架构,通过实战案例展示如何使用LangChain等工具开发智能客服Agent。文章涵盖自主任务拆解、工具调用、多轮交互等关键点,并分享避免“模型幻觉”的实践技巧及性能优化方法。适合程序…...