红外相机和RGB相机标定:实现两种模态数据融合
1. 前期准备
- RGB相机:森云智能SG2-IMX390,1个
- 红外相机:艾睿光电IR-Pilot 640X-32G,1个
- 红外标定板:https://item.taobao.com/item.htm?_u=jp3fdd12b99&id=644506141871&spm=a1z09.2.0.0.5f822e8dKrxxYI
2.操作步骤
2.1 采集标定数据
两种模态相机均未进行内参标定,如果发现原始图片畸变较大,可以先进行内参标定。数据采集代码如下,加热红外标定板后断电,移动标定板到合适的位置,按下s键,同时保存IR图和RG图
#!/usr/bin/env python3
import cv2 , time
import numpy as npir_dev = "/dev/video6"
rgb_dev = "/dev/video0"
# define a video capture object
ir_vid = cv2.VideoCapture(ir_dev)
rgb_vid = cv2.VideoCapture(rgb_dev) count = 0
while(True): # Capture the video frame by frame st_time = time.time()ret, ir_frame = ir_vid.read()# print(f"{time.time() - st_time}") ret, rgb_frame = rgb_vid.read()print(f"{time.time() - st_time}") # Display the resulting frame height, width = ir_frame.shape[:2]#(512,1280)index = [2*i+1 for i in range(width//2)]vis_ir_frame = ir_frame[:,index,:]vis_rgb_frame = cv2.resize(rgb_frame, (640,512))cv2.imshow('IR frame', vis_ir_frame) cv2.imshow('RGB frame', vis_rgb_frame) key = cv2.waitKey(1) & 0xFF if key == ord('q'): breakif key == ord('s'):cv2.imwrite(f"IR_{count}.png", vis_ir_frame)cv2.imwrite(f"RGB_{count}.png", vis_rgb_frame)count += 1# After the loop release the cap object
ir_vid.release()
rgb_vid.release()
# Destroy all the windows
cv2.destroyAllWindows()
2.2 进行标定
核心操作是调用opencv函数cv2.findHomography计算两个相机之间的单应性矩阵,代码如下
#!/usr/bin/python
# -*- coding: UTF-8 -*-
import cv2
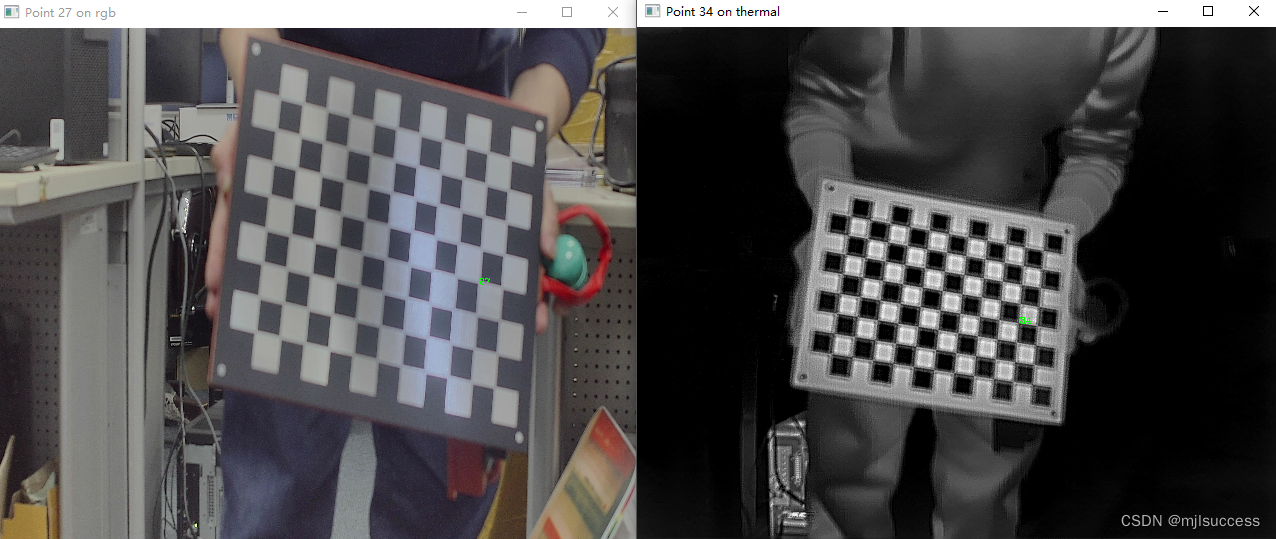
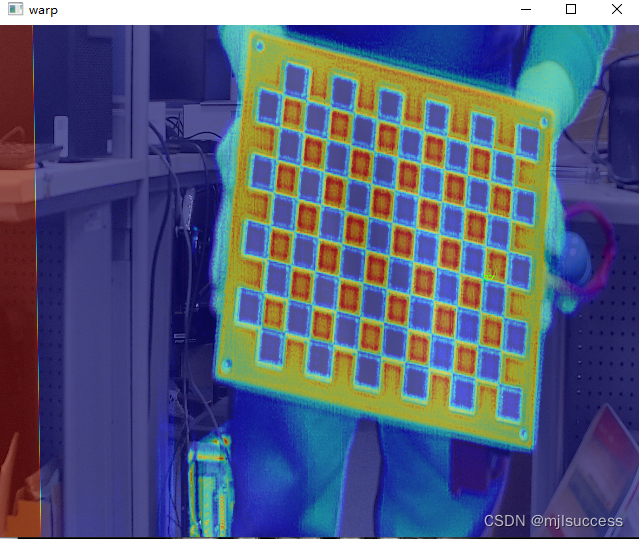
import numpy as npdef find_chessboard(filename, pattern=(9,8), wind_name="rgb"):# read input imageimg = cv2.imread(filename)# cv2.imshow("raw", img)# img = cv2.undistort(img, camera_matrix, distortion_coefficients)# convert the input image to a grayscalegray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# Find the chess board cornersret, corners = cv2.findChessboardCorners(gray, pattern, None)# if chessboard corners are detectedif ret == True:# Draw and display the cornersimg = cv2.drawChessboardCorners(img, pattern, corners, ret)#Draw number,打印角点编号,便于确定对应点corners = np.ceil(corners[:,0,:])for i, pt in enumerate(corners): cv2.putText(img, str(i), (int(pt[0]),int(pt[1])), cv2.FONT_HERSHEY_COMPLEX, 0.3, (0,255,0), 1)cv2.imshow(wind_name,img)return cornersreturn Noneif __name__ == '__main__' :idx = 2 #0~71rgb_img = cv2.imread(f"RGB_{idx}.png")t_img = cv2.imread(f"IR_{idx}.png")#chessboard grid nums in rgb ,注意观察,同一块标定板在RGB相机和红外相机中的格子说可能不一样rgb_width, rgb_height = 9, 8rgb_corners = find_chessboard(f"RGB_{idx}.png", (rgb_width, rgb_height), "rgb")#chessboard grid nums in thermal thermal_width, thermal_height = 11, 8t_corners = find_chessboard(f"IR_{idx}.png", (thermal_width, thermal_height), "thermal")if rgb_corners is not None and t_corners is not None:# test the id correspondence between rgb and thermal cornersrgb_idx = 27 #可视化一个点,确认取对应点的过程是否正确row, col = rgb_idx//rgb_width, rgb_idx%rgb_widtht_idx = row*thermal_width + col + 1pt = rgb_corners[rgb_idx]cv2.putText(rgb_img, str(rgb_idx), (int(pt[0]),int(pt[1])), cv2.FONT_HERSHEY_COMPLEX, 0.3, (0,255,0), 1)pt = t_corners[t_idx]cv2.putText(t_img, str(t_idx), (int(pt[0]),int(pt[1])), cv2.FONT_HERSHEY_COMPLEX, 0.3, (0,255,0), 1)cv2.imshow(f"Point {rgb_idx} on rgb", rgb_img)cv2.imshow(f"Point {t_idx} on thermal", t_img)# Calculate Homographysrc_pts = []for rgb_idx in range(len(rgb_corners)):row, col = rgb_idx//9, rgb_idx%9t_idx = row*11+col+1src_pts.append(t_corners[t_idx])h, status = cv2.findHomography(np.array(src_pts)[:,None,:], rgb_corners[:,None,:])np.savetxt("calib.param", h)# Warp source image to destination based on homographyt_warp = cv2.warpPerspective(t_img, h, (640,512), borderValue=(255,255,255))#colorizet_warp = cv2.applyColorMap(t_warp, cv2.COLORMAP_JET)#mix rgb and thermalalpha = 0.5merge = cv2.addWeighted(rgb_img, alpha, t_warp, 1-alpha, gamma=0)cv2.imshow("warp", merge)cv2.waitKey(0)cv2.destroyAllWindows()运行结果如下,观察红外和RGB图中角点的对应关系,编号已经可视化出来了
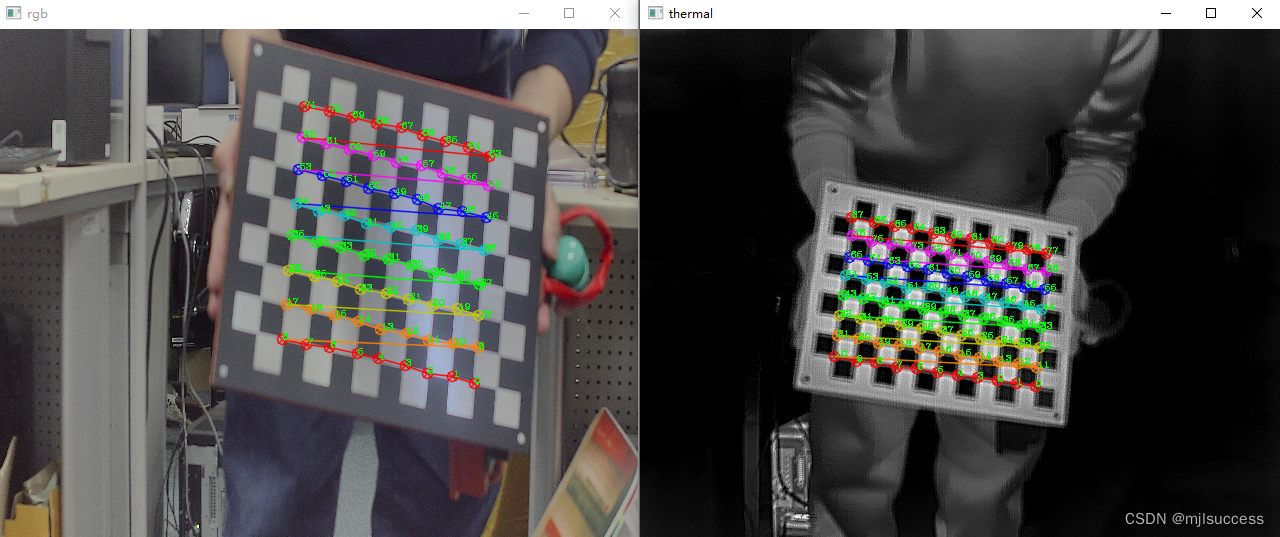
同时,也单独画出了1个对应后的点,如下图,可检查映射关系是否找对
最后,融合结果如下图所示:
相关文章:
红外相机和RGB相机标定:实现两种模态数据融合
1. 前期准备 RGB相机:森云智能SG2-IMX390,1个红外相机:艾睿光电IR-Pilot 640X-32G,1个红外标定板:https://item.taobao.com/item.htm?_ujp3fdd12b99&id644506141871&spma1z09.2.0.0.5f822e8dKrxxYI 2.操作步…...
前端项目,个人笔记(五)【图片懒加载 + 路由配置 + 面包屑 + 路由行为修改】
目录 1、图片懒加载 步骤一:自定义全局指令 步骤二:代码中使用 编辑步骤三:效果查看 步骤四:代码优化 2、封装组件案例-传对象 3、路由配置——tab标签 4、根据tab标签添加面包屑 4.1、实现 4.2、bug:需要…...
【MySQL】2.MySQL数据库的基本操作
目录 数据库基本操作 查看数据库信息 查看数据库结构 显示数据表的结构(字段) 常用的数据类型 数据库管理操作 SQL语句概述 SQL分类 1.DDL:数据定义语言 1.1创建数据库和表 创建数据库 创建数据表 1.2删除数据库和表 删除数据表…...
常见技术难点及方案
1. 分布式锁 1.1 难点 1.1.1 锁延期 同一时间内不允许多个客户端同时获得锁; 1.1.2 防止死锁 需要确保在任何故障场景下,都不会出现死锁; 1.2.3 可重入 特殊的锁机制,它允许同一个线程多次获取同一个锁而不会被阻塞。 1.2…...

c#关键字 static
static 修饰符可用于声明 static 类。 在类、接口和结构中,可以将 static 修饰符添加到字段、方法、属性、运算符、事件和构造函数。 static 修饰符不能用于索引器或终结器 尽管类的实例包含该类的所有实例字段的单独副本,但每个 static 字段只有一个副…...
)
redis 如何保证数据同步(数据变化时)
redis 如何保证数据同步(数据变化时) 思路 1.新增、删除和修改都先对数据库进行操作,这时数据库的数据将域缓存中数据不同。 2.数据库进行变动后,返回结果,根据返回的结果判断数据库操作是否成功。 3.如果数据库操…...

Ubuntu18.04桌面版设置静态IP地址
引用: Ubuntu配置静态IP_ubuntu配置静态ip地址-CSDN博客 正文 默认Unbuntu 18.04 Desktop桌面版使用 netplan 管理网卡网络地址。使用Unbuntu 18.04 桌面版配置,可以通过桌面上的设置图标配置网卡的静态IP地址。 点击桌面右上角下拉框,点击“设置”按…...
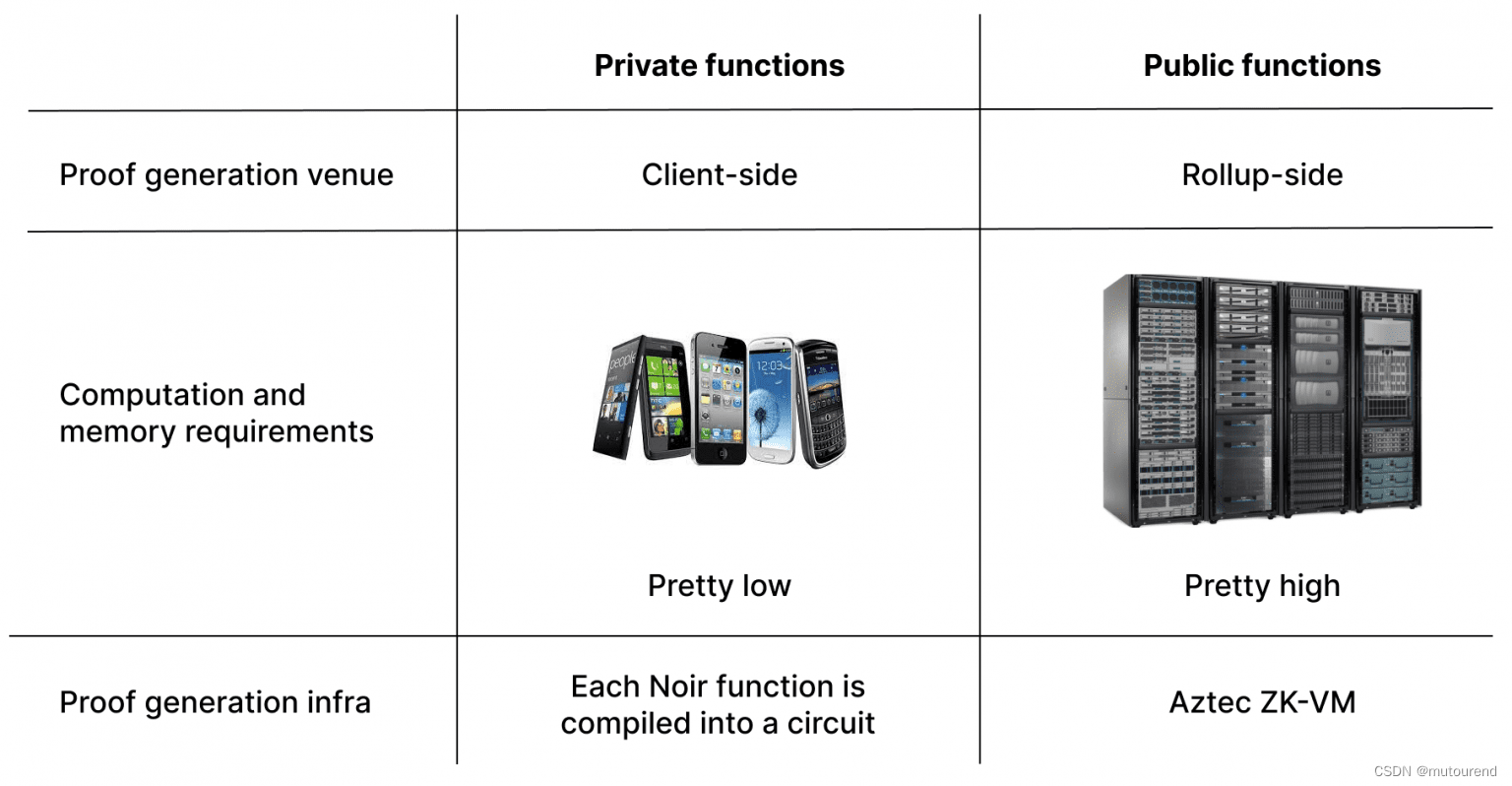
Aztec的客户端证明
1. 引言 隐私保护 zk-rollup 的证明生成与通用 zk-rollup 的证明生成有很大不同。原因是给定交易中存在特定数据(由私有函数处理),我们希望保持完全私有。在本文中,我们探讨了用于证明私有函数正确执行的客户端证明生成ÿ…...

面试官:小伙子知道synchronized的优化过程吗?我:嘚吧嘚吧嘚,面试官:出去!
写在开头 面试官:小伙子,多线程中锁用过吗? 我:那是自然! 面试官:那你知道synchronized的优化吗? 我:synchronized作为重锁,开销大,在早期不被推荐使用&…...
——第23天:风控建模中的贝叶斯优化是什么?怎么实现?)
100天精通风控建模(原理+Python实现)——第23天:风控建模中的贝叶斯优化是什么?怎么实现?
在当今风险多变的环境下,风控建模已经成为金融机构、企业等组织的核心工作之一。在各大银行和公司都实际运用于业务,用于营销和风险控制等。本文以视频的形式阐述风控建模中的召回率是什么,怎么实现。并提供风控建模原理和Python实现文章清单。 之前已经阐述了100天精通…...
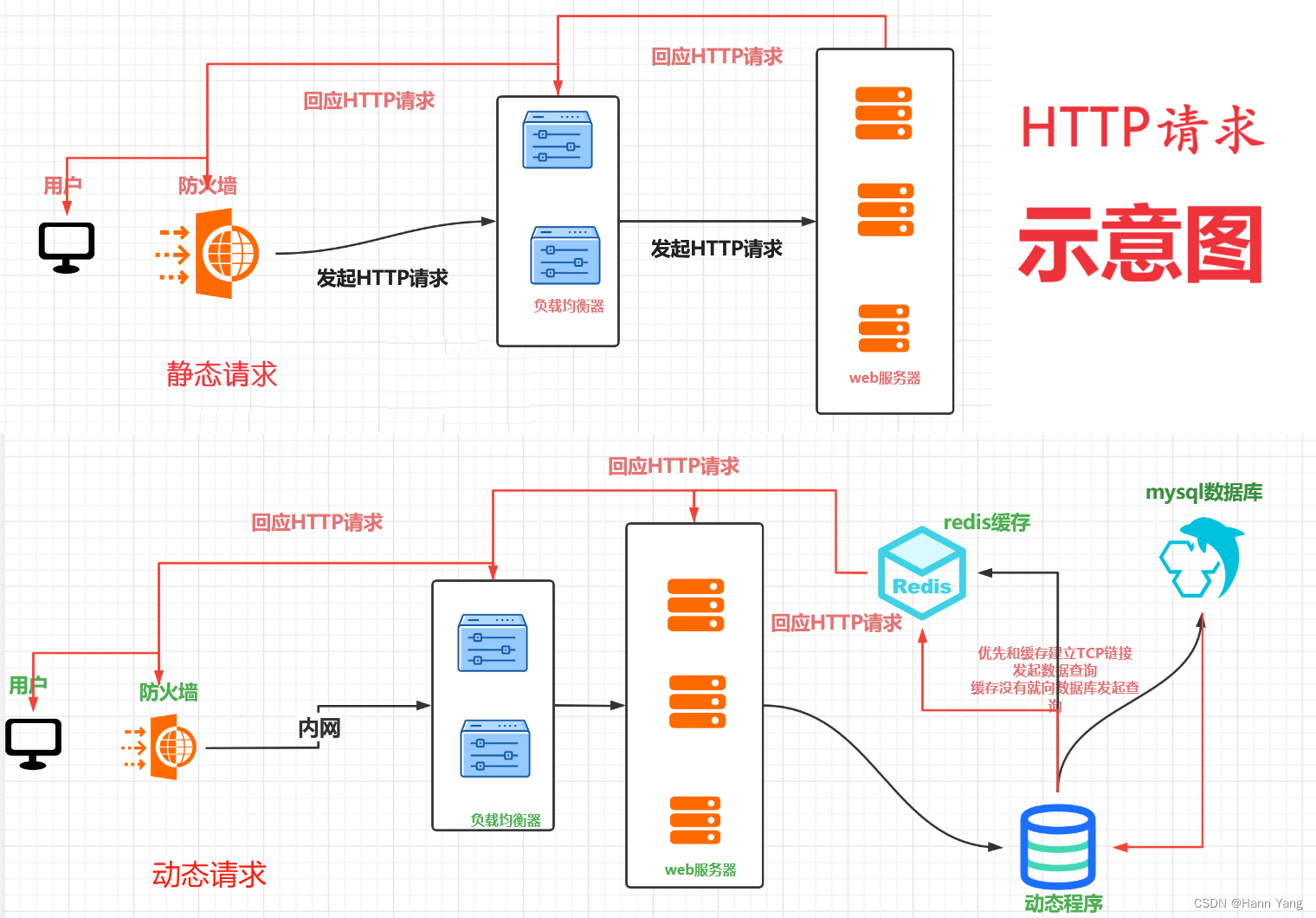
Http 超文本传输协议基本概念学习摘录
目录 HTTP协议 超文本传输协议 HyperText超文本 HTML超文本标记语言 HTTP协议原理 请求发送 服务器处理 响应发送 连接关闭或保持 HTTP协议版本 HTTP/0.9 HTTP/1.0 HTTP/1.1 HTTP/2 HTTP/3 HTTP请求方法 GET POST PUT DELETE HEAD OPTIONS HTTP请求头字…...

模拟-算法
文章目录 替换所有的问号提莫攻击Z字形变换外观数列数青蛙 替换所有的问号 算法思路: 从前往后遍历整个字符串,找到问号之后,就遍历 a ~ z 去尝试替换即可。 class Solution {public String modifyString(String s) {char[] ss s.toCharA…...
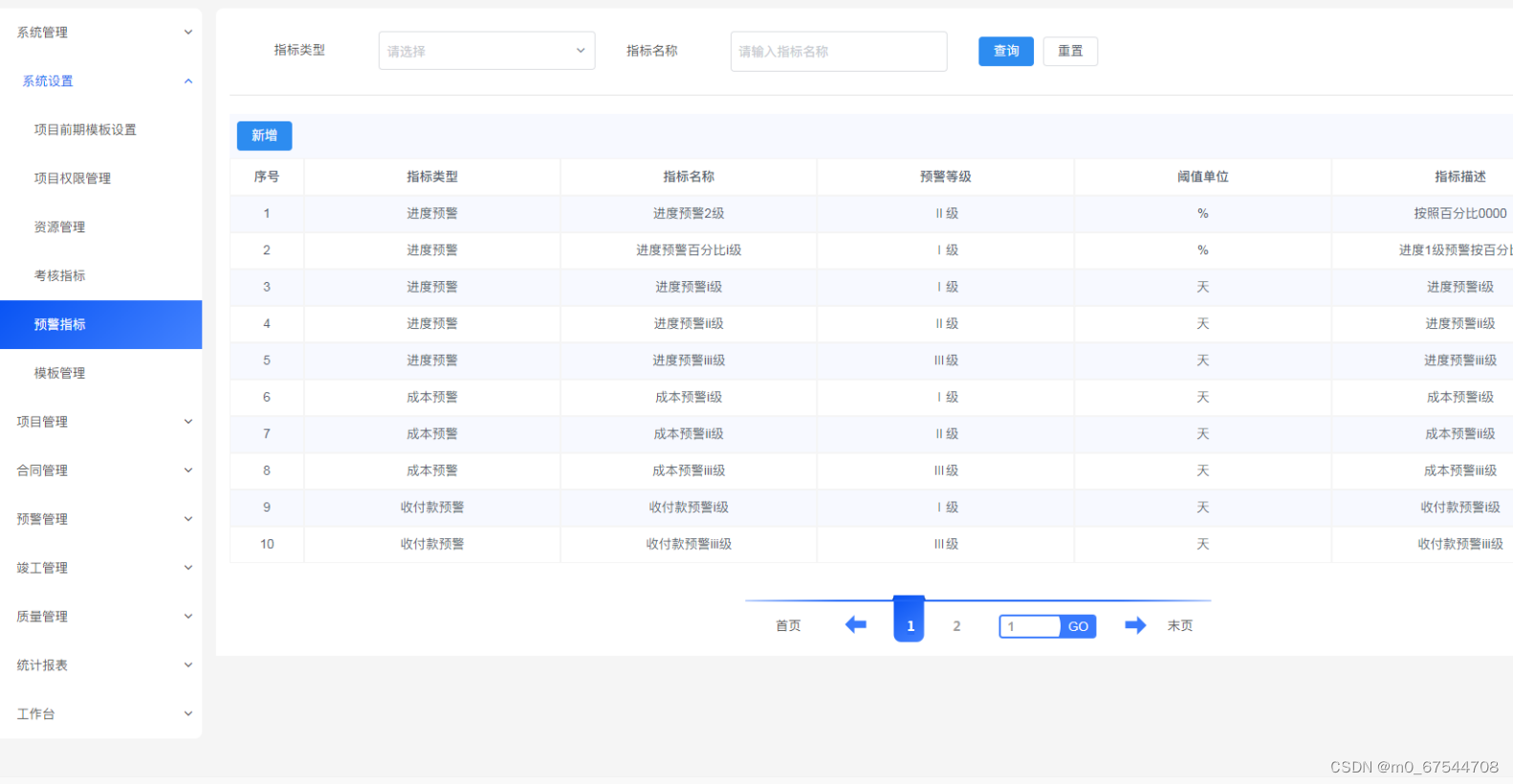
深入了解鸿鹄工程项目管理系统源码:功能清单与项目模块的深度解析
工程项目管理软件是现代项目管理中不可或缺的工具,它能够帮助项目团队更高效地组织和协调工作。本文将介绍一款功能强大的工程项目管理软件,该软件采用先进的Vue、Uniapp、Layui等技术框架,涵盖了项目策划决策、规划设计、施工建设到竣工交付…...
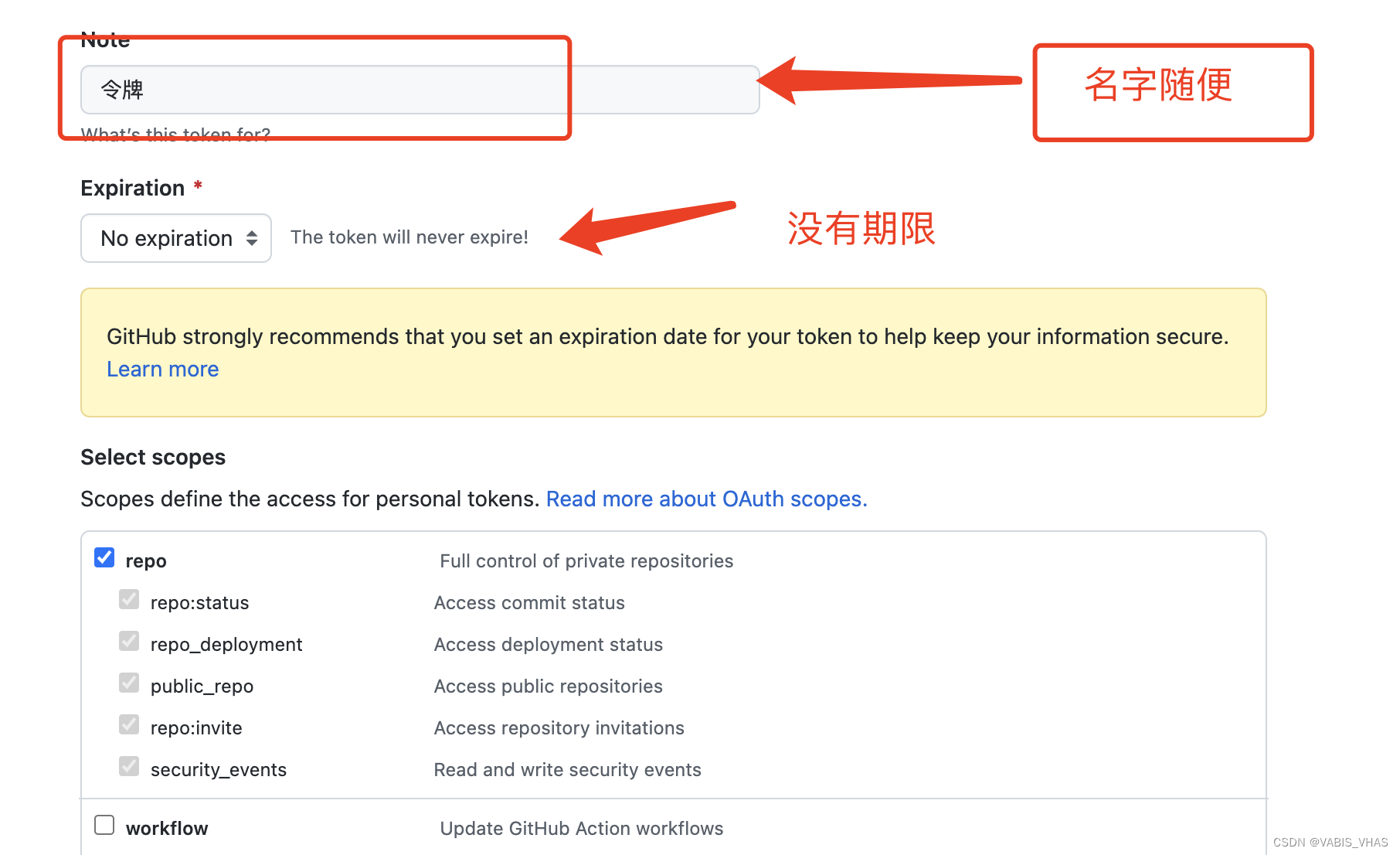
Unbuntu20.04 git push和pull相关问题
文章目录 Unbuntu20.04 git push和pull使用1.下载[Git工具包](https://git-scm.com/downloads)2.建立本地仓库3.将本地仓库与github远程仓库关联4.将本地仓库文件上传到github远程仓…...

hive SQL 移位、运算符、REGEXP正则等常用函数
orderflag & shiftleft(1,14) shiftleft(1,14) SQL中使用的运算符号详解_sql中各种符号-CSDN博客 Hive函数_hive shift-CSDN博客 (内建函数(类型排序)_云原生大数据计算服务 MaxCompute(MaxCompute)-阿里云帮助中心)...
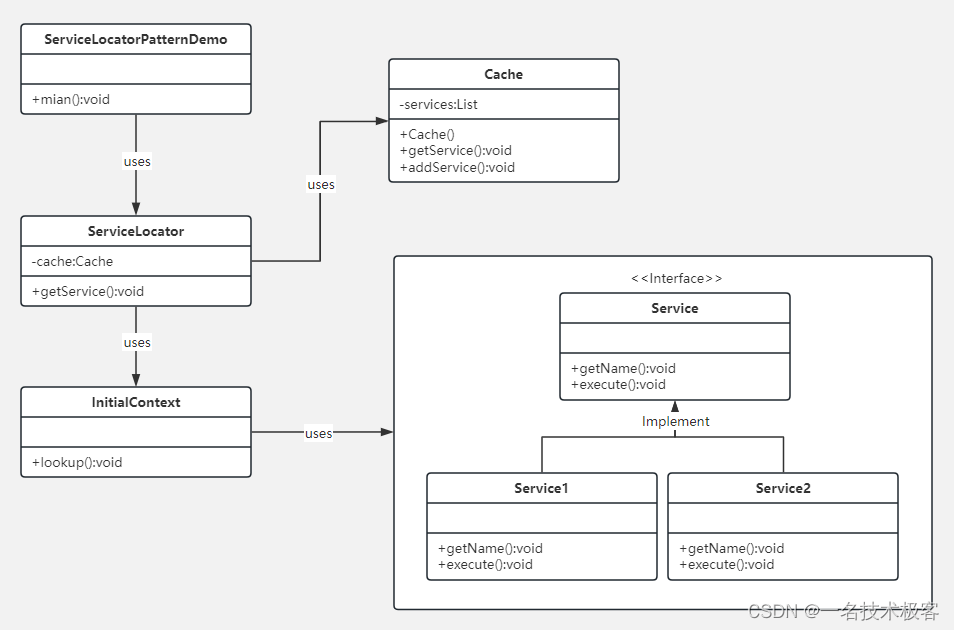
33-Java服务定位器模式 (Service Locator Pattern)
Java服务定位器模式 实现范例 服务定位器模式(Service Locator Pattern)用于想使用 JNDI 查询定位各种服务的时候考虑到为某个服务查找 JNDI 的代价很高,服务定位器模式充分利用了缓存技术在首次请求某个服务时,服务定位器在 JNDI…...

前端小卡片:vue3路由是什么,有什么作用,该如何配置?
在 Vue 3 中,路由的处理使用了 Vue Router,它是官方提供的路由管理器。Vue Router 用于实现单页应用中的路由功能,通过将不同的 URL 映射到对应的组件,实现页面之间的切换和导航。 Vue Router 的作用包括: 实现页面之…...
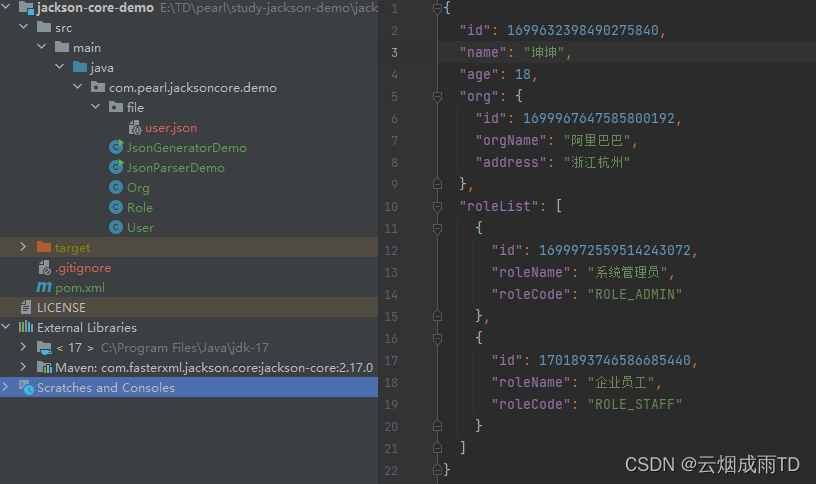
Jackson 2.x 系列【2】生成器 JsonGenerator
有道无术,术尚可求,有术无道,止于术。 本系列Jackson 版本 2.17.0 源码地址:https://gitee.com/pearl-organization/study-seata-demo 文章目录 1. 前言2. 案例演示2.1 创建 JsonFactory2.2 创建 JsonGenerator2.3 写入操作2.4 查…...
说说webpack中常见的Loader?解决了什么问题?
文章目录 一、是什么配置方式 二、特性三、常见的loadercss-loaderstyle-loaderless-loaderraw-loaderfile-loaderurl-loader 参考文献 一、是什么 loader 用于对模块的"源代码"进行转换,在 import 或"加载"模块时预处理文件 webpack做的事情…...

Django 铺垫
【一】基础知识点 【1】web框架的本质 Web框架本质上可以看成是一个功能强大的socket服务端用户的浏览器可以看成是拥有可视化界面的socket客服端两种通过网络请求实现数据交互 【2】浏览器发送请求 (1)HTTP协议 HTTP协议是超文本传输协议ÿ…...

别再死记硬背Payload了!我用XSS-Game靶场,带你拆解18种过滤规则背后的绕过逻辑
从XSS-Game靶场实战中掌握18种过滤规则的逆向思维在网络安全领域,跨站脚本攻击(XSS)始终是Web应用面临的主要威胁之一。许多开发者虽然了解XSS的基本概念,但当面对各种复杂的过滤规则时,往往不知如何系统分析并构造有效…...

METSO A413248自动化系统
METSO A413248 自动化系统模块产品特点: 品牌归属:芬兰METSO(美卓)工业自动化系统原装备件。 产品类型:工业级自动化控制模块/接口模块。 核心功能:用于控制信号处理、数据采集及系统集成。 系统兼容&am…...

光轮智能 谢晨 访谈总结机器人仿真数据产业
光轮智能 谢晨 访谈总结机器人仿真关于创始人关于数据数据金字塔数据痛点仿真数据的重要性仿真数据的质量b站链接地址公司官网关于创始人 清华物理;哥伦比亚金融;英伟达智驾仿真;小鹏智驾仿真;现为光轮智能CEO 关于数据 数据的…...

巨量投放总结
巨量商务管理平台 : https://business.oceanengine.com 巨量广告投放平台: https://ad.oceanengine.com 商务管理平台 账户 广告组 计划 广告投放平台 层级关系: 广告组 -> 计划 -> 创意 对应FB: 系列 - > 广告组 -> 广告...

脉冲神经网络加速器设计与边缘计算优化
1. 脉冲神经网络加速器的设计挑战与突破在边缘计算领域,脉冲神经网络(SNN)正以其独特的生物启发特性引发新一轮技术变革。与传统人工神经网络(ANN)相比,SNN通过离散的脉冲信号传递信息,模拟生物神经元的工作机制,理论上可实现超低…...

DS4Windows终极指南:3步让PS手柄在PC上完美运行游戏
DS4Windows终极指南:3步让PS手柄在PC上完美运行游戏 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows 还在为PS手柄连接Windows电脑后无法识别而烦恼吗?🎮…...

真可用!美团数字人模型开源,MV、电商等统统拿下
美团开源的数字人视频生成框架 LongCat-Video-Avatar 刚刚更新到 1.5 版本。是真能用。这版更新把音频编码器换了,推理步数砍到8步,在770人、13240条主观评分的大规模评测里,雷达图面积全面领先。音频编码器换血,8步出图LongCat-V…...

【DeepSeek灰度发布黄金法则】:20年SRE亲授7步零故障上线实战框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek灰度发布策略全景图 DeepSeek模型服务的灰度发布并非简单的流量切分,而是一套融合可观测性、渐进式验证与多维熔断机制的工程化闭环体系。其核心目标是在保障线上推理稳定性的同时&…...

PvZ Toolkit终极指南:三步掌握植物大战僵尸最强修改器
PvZ Toolkit终极指南:三步掌握植物大战僵尸最强修改器 【免费下载链接】pvztoolkit 植物大战僵尸 PC 版综合修改器 项目地址: https://gitcode.com/gh_mirrors/pv/pvztoolkit PvZ Toolkit是一款专为植物大战僵尸PC版设计的综合修改器工具,能够让你…...

3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验
3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hive…...