在基于Android相机预览的CV应用程序中使用 OpenCL
查看:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV4.9.0在Android 开发简介
下一篇:在 MacOS 中安装

本指南旨在帮助您在基于 Android 相机预览的 CV 应用程序中使用 OpenCL ™。教程是为 Android Studio 2022.2.1 编写的。它已使用 Ubuntu 22.04 进行了测试。
本教程假定您已安装并配置了以下内容:
- Android Studio (2022.2.1.+)
- JDK 17
- Android SDK
- Android NDK (25.2.9519653+)
- 从 github 或发布版下载 OpenCV 源代码,并按照 wiki 上的指令构建。
它还假定您熟悉 Android Java 和 JNI 编程基础知识。如果您需要上述任何方面的帮助,可以参考我们的 Android 开发简介指南。
本教程还假设您有一个启用了 OpenCL 的 Android 操作设备。
相关源代码位于 opencv/samples/android/tutorial-4-opencl 目录下的 OpenCV 示例中。
如何使用 OpenCL 构建自定义 OpenCV Android SDK
- 组装和配置 Android OpenCL SDK。示例的 JNI 部分依赖于标准的 Khornos OpenCL 标头,以及 OpenCL 和 libOpenCL.so 的C++包装器。标准的 OpenCL 标头可以从 OpenCV 存储库中的第三方目录或您的 Linux 分发包中复制。C++ 包装器可在 Github 上的官方 Khronos 存储库中找到。按以下方式将头文件复制到教学目录: libOpenCL.so 可以随 BSP 一起提供,也可以从任何具有相关架构的 OpenCL-cabaple Android 设备下载
cd your_path/ && mkdir ANDROID_OPENCL_SDK && mkdir ANDROID_OPENCL_SDK/include && cd ANDROID_OPENCL_SDK/include cp -r path_to_opencv/opencv/3rdparty/include/opencl/1.2/CL . && cd CL wget https://github.com/KhronosGroup/OpenCL-CLHPP/raw/main/include/CL/opencl.hpp wget https://github.com/KhronosGroup/OpenCL-CLHPP/raw/main/include/CL/cl2.hpp libOpenCL.so 的系统版本可能有很多特定于平台的依赖关系。
libOpenCL.so 的系统版本可能有很多特定于平台的依赖关系。cd your_path/ANDROID_OPENCL_SDK && mkdir lib && cd lib adb pull /system/vendor/lib64/libOpenCL.so
-Wl,--allow-shlib-undefined标志允许忽略在构建过程中未使用的第三方符号。以下 CMake 行允许将 JNI 部件链接到标准 OpenCL,但不能将 loadLibrary 包含在应用程序包中。系统 OpenCL API 用于运行时。
target_link_libraries(${target} -lOpenCL)
使用 OpenCL 构建自定义 OpenCV Android SDK。默认情况下,OpenCL 支持 (T-API) 在 Android 操作系统的 OpenCV 构建中处于禁用状态。但可以在启用 OpenCL/T-API 的情况下在本地重建适用于 Android 的 OpenCV:CMake 的 use 选项。您还需要为 CMake 指定 Android OpenCL SDK: use 选项的路径。如果您正在使用 OpenCV 构建 OpenCV,请按照 wiki 上的说明进行操作。在 中设置这些 CMake 参数,例如:-DWITH_OPENCL=ON-DANDROID_OPENCL_SDK=path_to_your_Android_OpenCL_SDKbuild_sdk.py.config.pyndk-18-api-level-21.config.py
ABI("3", "arm64-v8a", None, 21, cmake_vars=dict('WITH_OPENCL': 'ON', 'ANDROID_OPENCL_SDK': 'path_to_your_Android_OpenCL_SDK'))如果您使用 cmake/ninja 构建 OpenCV,请使用以下 bash 脚本(设置您的NDK_VERSION和路径,而不是路径示例):
cd path_to_opencv && mkdir build && cd build
export NDK_VERSION=25.2.9519653
export ANDROID_SDK=/home/user/Android/Sdk/
export ANDROID_OPENCL_SDK=/path_to_ANDROID_OPENCL_SDK/
export ANDROID_HOME=$ANDROID_SDK
export ANDROID_NDK_HOME=$ANDROID_SDK/ndk/$NDK_VERSION/
cmake -GNinja -DCMAKE_TOOLCHAIN_FILE=$ANDROID_NDK_HOME/build/cmake/android.toolchain.cmake -DANDROID_STL=c++_shared -DANDROID_NATIVE_API_LEVEL=24
-DANDROID_SDK=$ANDROID_SDK -DANDROID_NDK=$ANDROID_NDK_HOME -DBUILD_JAVA=ON -DANDROID_HOME=$ANDROID_SDK -DBUILD_ANDROID_EXAMPLES=ON
-DINSTALL_ANDROID_EXAMPLES=ON -DANDROID_ABI=arm64-v8a -DWITH_OPENCL=ON -DANDROID_OPENCL_SDK=$ANDROID_OPENCL_SDK ..前言
现在,通过 OpenCL 使用 GPGPU 来增强应用程序性能是一种相当现代的趋势。一些CV算法(例如图像过滤)在GPU上的运行速度比在CPU上快得多。最近,它在 Android 操作系统上已成为可能。
对于 Android 操作的设备,最流行的 CV 应用场景是在预览模式下启动相机,将一些 CV 算法应用于每个帧,并显示由该 CV 算法修改的预览帧。
让我们考虑一下如何在这种情况下使用 OpenCL。具体来说,让我们尝试两种方式:直接调用 OpenCL API 和最近引入的 OpenCV T-API(又名透明 API)——一些 OpenCV 算法的隐式 OpenCL 加速。
应用程序结构
启动 Android API 级别 11 (Android 3.0) 相机 API 允许使用 OpenGL 纹理作为预览帧的目标。Android API 级别 21 带来了一个新的 Camera2 API,它提供了对相机设置和使用模式的更多控制,它允许预览帧的多个目标,特别是 OpenGL 纹理。
在 OpenGL 纹理中拥有预览帧对于使用 OpenCL 来说很划算,因为有一个 OpenGL-OpenCL 互操作性 API (cl_khr_gl_sharing),允许与 OpenCL 函数共享 OpenGL 纹理数据而无需复制(当然有一些限制)。
让我们为我们的应用程序创建一个基础,该基础仅将 Android 相机配置为将预览帧发送到 OpenGL 纹理,并在显示器上显示这些帧,而无需进行任何处理。
用于此目的的最小类Activity如下所示:Activity
public class Tutorial4Activity extends Activity {
private MyGLSurfaceView mView;
@Override
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
requestWindowFeature(Window.FEATURE_NO_TITLE);
getWindow().setFlags(WindowManager.LayoutParams.FLAG_FULLSCREEN,
WindowManager.LayoutParams.FLAG_FULLSCREEN);
getWindow().setFlags(WindowManager.LayoutParams.FLAG_KEEP_SCREEN_ON,
WindowManager.LayoutParams.FLAG_KEEP_SCREEN_ON);
setRequestedOrientation(ActivityInfo.SCREEN_ORIENTATION_LANDSCAPE);
mView = new MyGLSurfaceView(this);
setContentView(mView);
}
@Override
protected void onPause() {
mView.onPause();
super.onPause();
}
@Override
protected void onResume() {
super.onResume();
mView.onResume();
}
}和最小的类View分别是
public class MyGLSurfaceView extends CameraGLSurfaceView implements CameraGLSurfaceView.CameraTextureListener {
static final String LOGTAG = "MyGLSurfaceView";
protected int procMode = NativePart.PROCESSING_MODE_NO_PROCESSING;
static final String[] procModeName = new String[] {"No Processing", "CPU", "OpenCL Direct", "OpenCL via OpenCV"};
protected int frameCounter;
protected long lastNanoTime;
TextView mFpsText = null;
public MyGLSurfaceView(Context context, AttributeSet attrs) {
super(context, attrs);
}
@Override
public boolean onTouchEvent(MotionEvent e) {
if(e.getAction() == MotionEvent.ACTION_DOWN)
((Activity)getContext()).openOptionsMenu();
return true;
}
@Override
public void surfaceCreated(SurfaceHolder holder) {
super.surfaceCreated(holder);
//NativePart.initCL();
}
@Override
public void surfaceDestroyed(SurfaceHolder holder) {
//NativePart.closeCL();
super.surfaceDestroyed(holder);
}
public void setProcessingMode(int newMode) {
if(newMode>=0 && newMode<procModeName.length)
procMode = newMode;
else
Log.e(LOGTAG, "Ignoring invalid processing mode: " + newMode);
((Activity) getContext()).runOnUiThread(new Runnable() {
public void run() {
Toast.makeText(getContext(), "Selected mode: " + procModeName[procMode], Toast.LENGTH_LONG).show();
}
});
}
@Override
public void onCameraViewStarted(int width, int height) {
((Activity) getContext()).runOnUiThread(new Runnable() {
public void run() {
Toast.makeText(getContext(), "onCameraViewStarted", Toast.LENGTH_SHORT).show();
}
});
if (NativePart.builtWithOpenCL())
NativePart.initCL();
frameCounter = 0;
lastNanoTime = System.nanoTime();
}
@Override
public void onCameraViewStopped() {
((Activity) getContext()).runOnUiThread(new Runnable() {
public void run() {
Toast.makeText(getContext(), "onCameraViewStopped", Toast.LENGTH_SHORT).show();
}
});
}
@Override
public boolean onCameraTexture(int texIn, int texOut, int width, int height) {
// FPS
frameCounter++;
if(frameCounter >= 30)
{
final int fps = (int) (frameCounter * 1e9 / (System.nanoTime() - lastNanoTime));
Log.i(LOGTAG, "drawFrame() FPS: "+fps);
if(mFpsText != null) {
Runnable fpsUpdater = new Runnable() {
public void run() {
mFpsText.setText("FPS: " + fps);
}
};
new Handler(Looper.getMainLooper()).post(fpsUpdater);
} else {
Log.d(LOGTAG, "mFpsText == null");
mFpsText = (TextView)((Activity) getContext()).findViewById(R.id.fps_text_view);
}
frameCounter = 0;
lastNanoTime = System.nanoTime();
}
if(procMode == NativePart.PROCESSING_MODE_NO_PROCESSING)
return false;
NativePart.processFrame(texIn, texOut, width, height, procMode);
return true;
}
}注意
我们使用两个渲染器类:一个用于旧版 Camera API,另一个用于现代 Camera2。
一个最小的类Renderer可以在 Java 中实现(OpenGL ES 2.0 在 Java 中可用),但由于我们将使用 OpenCL 修改预览纹理,因此让我们将 OpenGL 的东西移动到 JNI。下面是 JNI 内容的简单 Java 包装器:
public class NativePart {
static
{
System.loadLibrary("opencv_java4");
System.loadLibrary("JNIpart");
}
public static final int PROCESSING_MODE_NO_PROCESSING = 0;
public static final int PROCESSING_MODE_CPU = 1;
public static final int PROCESSING_MODE_OCL_DIRECT = 2;
public static final int PROCESSING_MODE_OCL_OCV = 3;
public static native boolean builtWithOpenCL();
public static native int initCL();
public static native void closeCL();
public static native void processFrame(int tex1, int tex2, int w, int h, int mode);
}由于 Camera 和Camera2 API 在相机设置和控制方面存在很大差异,因此让我们为两个相应的渲染器创建一个基类:
public abstract class MyGLRendererBase implements GLSurfaceView.Renderer, SurfaceTexture.OnFrameAvailableListener {
protected final String LOGTAG = "MyGLRendererBase";
protected SurfaceTexture mSTex;
protected MyGLSurfaceView mView;
protected boolean mGLInit = false;
protected boolean mTexUpdate = false;
MyGLRendererBase(MyGLSurfaceView view) {
mView = view;
}
protected abstract void openCamera();
protected abstract void closeCamera();
protected abstract void setCameraPreviewSize(int width, int height);
public void onResume() {
Log.i(LOGTAG, "onResume");
}
public void onPause() {
Log.i(LOGTAG, "onPause");
mGLInit = false;
mTexUpdate = false;
closeCamera();
if(mSTex != null) {
mSTex.release();
mSTex = null;
NativeGLRenderer.closeGL();
}
}
@Override
public synchronized void onFrameAvailable(SurfaceTexture surfaceTexture) {
//Log.i(LOGTAG, "onFrameAvailable");
mTexUpdate = true;
mView.requestRender();
}
@Override
public void onDrawFrame(GL10 gl) {
//Log.i(LOGTAG, "onDrawFrame");
if (!mGLInit)
return;
synchronized (this) {
if (mTexUpdate) {
mSTex.updateTexImage();
mTexUpdate = false;
}
}
NativeGLRenderer.drawFrame();
}
@Override
public void onSurfaceChanged(GL10 gl, int surfaceWidth, int surfaceHeight) {
Log.i(LOGTAG, "onSurfaceChanged("+surfaceWidth+"x"+surfaceHeight+")");
NativeGLRenderer.changeSize(surfaceWidth, surfaceHeight);
setCameraPreviewSize(surfaceWidth, surfaceHeight);
}
@Override
public void onSurfaceCreated(GL10 gl, EGLConfig config) {
Log.i(LOGTAG, "onSurfaceCreated");
String strGLVersion = GLES20.glGetString(GLES20.GL_VERSION);
if (strGLVersion != null)
Log.i(LOGTAG, "OpenGL ES version: " + strGLVersion);
int hTex = NativeGLRenderer.initGL();
mSTex = new SurfaceTexture(hTex);
mSTex.setOnFrameAvailableListener(this);
openCamera();
mGLInit = true;
}
}如您所见, Camera 和 Camera2 APIs的继承者应实现以下抽象方法:
protected abstract void openCamera();
protected abstract void closeCamera();
protected abstract void setCameraPreviewSize(int width, int height);让我们把它们实现的细节留给本教程之外,请参考源代码查看它们。
预览帧修改
OpenGL ES 2.0 初始化的细节也相当简单明了,这里要引用的嘈杂,但这里重要的一点是,作为相机预览目标的 OpeGL 纹理应该是类型(不是),在内部它以 YUV 格式保存图片数据。这使得无法通过 CL-GL 互操作 () 共享它并通过 C/C++ 代码访问其像素数据。为了克服这个限制,我们必须使用 FrameBuffer 对象(又名 FBO)执行从这个纹理到另一个常规纹理的 OpenGL 渲染
OpenGL ES 2.0 初始化的细节也相当简单明了,这里要引用的嘈杂,但这里重要的一点是,作为相机预览目标的 OpeGL 纹理应该是类型(GL_TEXTURE_EXTERNAL_OES不是GL_TEXTURE_2D),在内部它以 YUV 格式保存图片数据。这使得无法通过 CL-GL cl_khr_gl_sharing互操作 () 共享它并通过 C/C++ 代码访问其像素数据。为了克服这个限制,我们必须使用 FrameBuffer 对象(又名 FBO)执行从这个纹理GL_TEXTURE_2D到另一个常规纹理的 OpenGL 渲染。
C/C++ code
之后,我们可以从 C/C++ 读取( glReadPixels()复制)像素数据,并通过修改后将它们写回纹理 glTexSubImage2D()。
直接 OpenCL 调用
此外,该纹理可以在不复制的情况下与 OpenCL 共享,但我们必须以特殊方式创建 OpenCL context如下:
int initCL()
{
dumpCLinfo();
LOGE("initCL: start initCL");
EGLDisplay mEglDisplay = eglGetCurrentDisplay();
if (mEglDisplay == EGL_NO_DISPLAY)
LOGE("initCL: eglGetCurrentDisplay() returned 'EGL_NO_DISPLAY', error = %x", eglGetError());
EGLContext mEglContext = eglGetCurrentContext();
if (mEglContext == EGL_NO_CONTEXT)
LOGE("initCL: eglGetCurrentContext() returned 'EGL_NO_CONTEXT', error = %x", eglGetError());
cl_context_properties props[] =
{ CL_GL_CONTEXT_KHR, (cl_context_properties) mEglContext,
CL_EGL_DISPLAY_KHR, (cl_context_properties) mEglDisplay,
CL_CONTEXT_PLATFORM, 0,
0 };
try
{
haveOpenCL = false;
cl::Platform p = cl::Platform::getDefault();
std::string ext = p.getInfo<CL_PLATFORM_EXTENSIONS>();
if(ext.find("cl_khr_gl_sharing") == std::string::npos)
LOGE("Warning: CL-GL sharing isn't supported by PLATFORM");
props[5] = (cl_context_properties) p();
theContext = cl::Context(CL_DEVICE_TYPE_GPU, props);
std::vector<cl::Device> devs = theContext.getInfo<CL_CONTEXT_DEVICES>();
LOGD("Context returned %d devices, taking the 1st one", devs.size());
ext = devs[0].getInfo<CL_DEVICE_EXTENSIONS>();
if(ext.find("cl_khr_gl_sharing") == std::string::npos)
LOGE("Warning: CL-GL sharing isn't supported by DEVICE");
theQueue = cl::CommandQueue(theContext, devs[0]);
cl::Program::Sources src(1, std::make_pair(oclProgI2I, sizeof(oclProgI2I)));
theProgI2I = cl::Program(theContext, src);
theProgI2I.build(devs);
cv::ocl::attachContext(p.getInfo<CL_PLATFORM_NAME>(), p(), theContext(), devs[0]());
if( cv::ocl::useOpenCL() )
LOGD("OpenCV+OpenCL works OK!");
else
LOGE("Can't init OpenCV with OpenCL TAPI");
haveOpenCL = true;
}
catch(const cl::Error& e){
LOGE("cl::Error: %s (%d)", e.what(), e.err());
return 1;
}
catch(const std::exception& e)
{
LOGE("std::exception: %s", e.what());
return 2;
}
catch(...)
{
LOGE( "OpenCL info: unknown error while initializing OpenCL stuff" );
return 3;
}
LOGD("initCL completed");
if (haveOpenCL)
return 0;
else
return 4;
}然后,纹理可以被对象包装 cl::ImageGL并通过 OpenCL 调用进行处理
cl::ImageGL imgIn (theContext, CL_MEM_READ_ONLY, GL_TEXTURE_2D, 0, texIn);
cl::ImageGL imgOut(theContext, CL_MEM_WRITE_ONLY, GL_TEXTURE_2D, 0, texOut);
std::vector < cl::Memory > images;
images.push_back(imgIn);
images.push_back(imgOut);
int64_t t = getTimeMs();
theQueue.enqueueAcquireGLObjects(&images);
theQueue.finish();
LOGD("enqueueAcquireGLObjects() costs %d ms", getTimeInterval(t));
t = getTimeMs();
cl::Kernel Laplacian(theProgI2I, "Laplacian"); //TODO: may be done once
Laplacian.setArg(0, imgIn);
Laplacian.setArg(1, imgOut);
theQueue.finish();
LOGD("Kernel() costs %d ms", getTimeInterval(t));
t = getTimeMs();
theQueue.enqueueNDRangeKernel(Laplacian, cl::NullRange, cl::NDRange(w, h), cl::NullRange);
theQueue.finish();
LOGD("enqueueNDRangeKernel() costs %d ms", getTimeInterval(t));
t = getTimeMs();
theQueue.enqueueReleaseGLObjects(&images);
theQueue.finish();
LOGD("enqueueReleaseGLObjects() costs %d ms", getTimeInterval(t));OpenCV T-API
但是,与其自己编写 OpenCL 代码,不如使用隐式调用 OpenCL 的 OpenCV T-API。您只需要将创建的 OpenCL 上下文传递给 OpenCV(通过cv::ocl::attachContext() ),并以某种 cv::UMat
int64_t t = getTimeMs();
cl::ImageGL imgIn (theContext, CL_MEM_READ_ONLY, GL_TEXTURE_2D, 0, texIn);
std::vector < cl::Memory > images(1, imgIn);
theQueue.enqueueAcquireGLObjects(&images);
theQueue.finish();
cv::UMat uIn, uOut, uTmp;
cv::ocl::convertFromImage(imgIn(), uIn);
LOGD("loading texture data to OpenCV UMat costs %d ms", getTimeInterval(t));
theQueue.enqueueReleaseGLObjects(&images);
t = getTimeMs();
//cv::blur(uIn, uOut, cv::Size(5, 5));
cv::Laplacian(uIn, uTmp, CV_8U);
cv:multiply(uTmp, 10, uOut);
cv::ocl::finish();
LOGD("OpenCV processing costs %d ms", getTimeInterval(t));
t = getTimeMs();
cl::ImageGL imgOut(theContext, CL_MEM_WRITE_ONLY, GL_TEXTURE_2D, 0, texOut);
images.clear();
images.push_back(imgOut);
theQueue.enqueueAcquireGLObjects(&images);
cl_mem clBuffer = (cl_mem)uOut.handle(cv::ACCESS_READ);
cl_command_queue q = (cl_command_queue)cv::ocl::Queue::getDefault().ptr();
size_t offset = 0;
size_t origin[3] = { 0, 0, 0 };
size_t region[3] = { (size_t)w, (size_t)h, 1 };
CV_Assert(clEnqueueCopyBufferToImage (q, clBuffer, imgOut(), offset, origin, region, 0, NULL, NULL) == CL_SUCCESS);
theQueue.enqueueReleaseGLObjects(&images);
cv::ocl::finish();
LOGD("uploading results to texture costs %d ms", getTimeInterval(t));注意
当通过 OpenCL 图像包装器将修改后的图像放回原始 OpenGL 纹理时,我们必须再制作一个图像数据副本。
性能说明
为了比较在具有720p相机分辨率的Sony Xperia Z3上,通过C / C++代码(调用cv::Laplacian与cv::Mat),直接OpenCL调用(使用OpenCL图像进行输入和输出)和OpenCV T-API(调用cv::Laplacian与cv::UMat)完成的相同预览帧修改(Laplacian)的FPS:
- C/C++ 版本显示 3-4 fps
- 直接 OpenCL 调用显示 25-27 fps
- OpenCV T-API 显示 11-13 fps(由于额外的来回复制)
cl_imagecl_buffer
参考文献:
1、《Use OpenCL in Android camera preview based CV application》 Andrey Pavlenko, Alexander Panov
相关文章:
在基于Android相机预览的CV应用程序中使用 OpenCL
查看:OpenCV系列文章目录(持续更新中......) 上一篇:OpenCV4.9.0在Android 开发简介 下一篇:在 MacOS 中安装 本指南旨在帮助您在基于 Android 相机预览的 CV 应用程序中使用 OpenCL ™。教程是为 Android Studio 20…...
网络分类简述与数据链路层协议(PPP)
实验拓扑 实验要求 1、R1和R2使用PPP链路直连,R2和R3把2条PPP链路捆绑为PPP MP直连按照图示配置IP地址 2、R2对R1的PPP进行单向chap验证 3、R2和R3的PPP进行双向chap验证 实验思路 给R1、R2的S3/0/0接口配置IP地址,已给出网段192.168.1.0/24R2作为主…...
Linux文件系列:磁盘,文件系统,软硬链接
Linux文件系列:磁盘,文件系统,软硬链接 一.磁盘相关知识1.磁盘机械构成2.磁盘物理存储3.磁盘逻辑存储1.LBA地址2.磁盘的分区和分组 二.文件系统和inode1.inode结构体2.文件系统1.Super Block(超级块)2.Group Descriptor Table(块组描述表GDT)3.inode Table4.Data Blocks5.Block…...

GPT4.0
GPT4.0 支持官网所有功能以及所有第三方GPTS,完全同步官网。无需魔法,填写授权码直达官网。全天超18小时维护,无需担心不稳定。没有永久卡,3.5免费提供,4.0可以按需下单即可,不存在跑路。 需要的联系...
软件工程(双语)
教材《软件工程 实践者的研究方法》 双语教学,但目前感觉都是在讲没用的 ”过程决定质量,复用决定效率” 介绍 软工的本质 程序数据结构算法 软件程序文档(需求、模型、说明书) 软件应用: 系统软件 应用 工程/科学…...
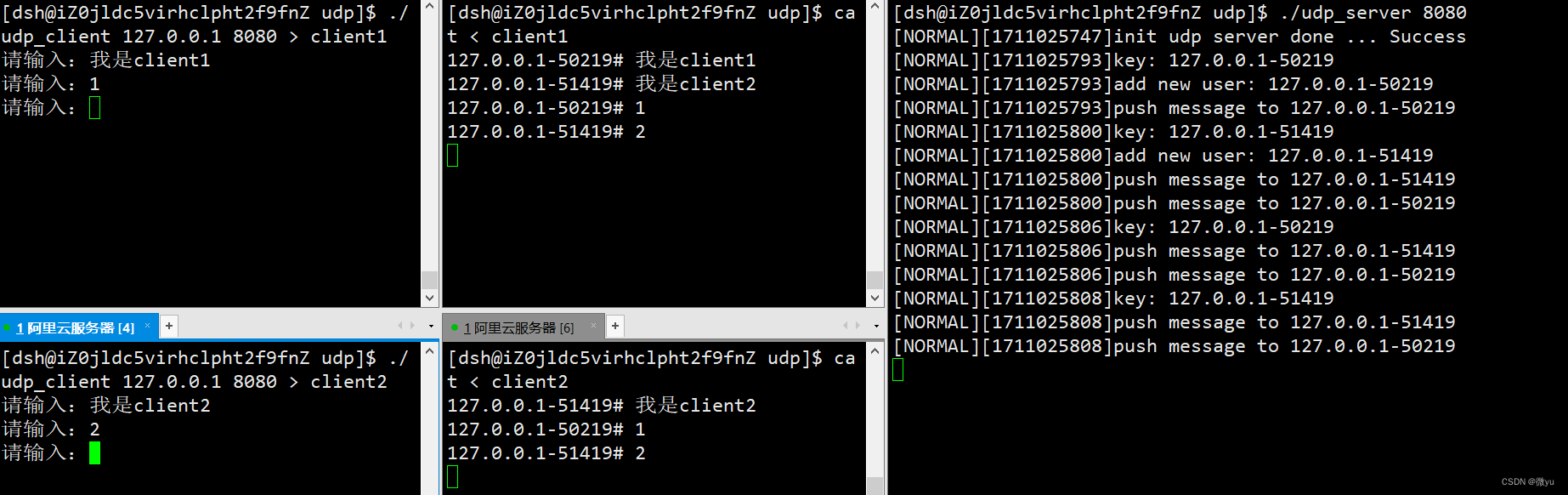
网络——套接字编程UDP
目录 端口号 源端口号和目的端口号 认识TCP协议和UDP协议 网络字节序 socket编程接口 socket常见接口 sockaddr结构 UDP socket bind recvfrom sendto 编写客户端 绑定INADDR_ANY 实现聊天功能 端口号 在这之前我们已经说过源IP地址和目的IP地址,还有…...

FPGA_AD9361
1.集成12位DAC和ADC的一款器件,2个输入模拟通道和2个输出模拟通道 2.• TX频段:47 MHz至6.0 GHz • RX频段:70 MHz至6.0 GHz 3.SPI配置成LVDS或CMOS接口,也可以还可以选择FDD(频分双工——全双工,操作时需…...

探讨Java代码混淆加固工具
摘要 本篇博客将介绍几种常用的Java代码混淆工具,如ProGuard、Allatori Java Obfuscator、VirboxProtector、ipaguard和DashO。我们将深入探讨它们的特点、功能以及在保护Java应用程序安全方面的作用。此外,还将强调在使用Java代码混淆工具时需要注意的安…...

Linux——du, df命令查看磁盘空间使用情况
一、实现原理: df 命令的全称是Disk Free ,显而易见它是统计磁盘中空闲的空间,也即空闲的磁盘块数。它是通过文件系统磁盘块分配图进行计算出的。 du 命令的全称是 Disk Used ,统计磁盘有已经使用的空间。它是直接统计各文件各目…...

数据库实验(一)SQL Server触发器
目录 触发器的定义 触发器和存储过程的区别 触发器的优点 触发器的作用 触发器的分类 DML触发器 DDL触发器 登录触发器 触发器的工作原理 inserted表 deleted表 创建触发器 编程要求 测试要求: 实验代码: 触发器的定义 触发器是建立在触…...

添加网址到主页
基于localStorage的网址收藏夹-CSDN博客 为了通过安卓菜单添加网址到主页中,调试了几个小时,主要踩了几个坑。 1.localStorage 通过域名隔离,需要加载主页才能读写。 2.WebView 可以不显示,但是 JS 代码要放在 window.onload 中…...

消息中间件如何实现高可用
消息中间件实现高可用的方式有很多种,常见的方法包括: 集群部署:通过在多台服务器上部署消息中间件实例,构成一个集群,提高整体系统的可用性。当一台机器出现故障时,其他机器可以继续提供服务。主从复制&a…...
Hbase 王者荣耀数据表 HBase常用Shell命令
大数据课本: HBase常用Shell命令 在使用具体的Shell命令操作HBase数据之前,需要首先启动Hadoop,然后再启动HBase,并且启动HBase Shell,进入Shell命令提示符状态,具体命令如下: $ cd /usr/local…...

家用智能洗地机哪个牌子好?4款型号让你解锁高效省力生活体验
在今天的社会中,随着生活节奏的加快,人们对于家庭清洁的需求不断增加。传统的清洁方法已经无法满足现代家庭的需求。因此,洗地机作为一种高效、方便的清洁工具,已经成为了许多家庭首选的清洁设备。然而,在市场上&#…...
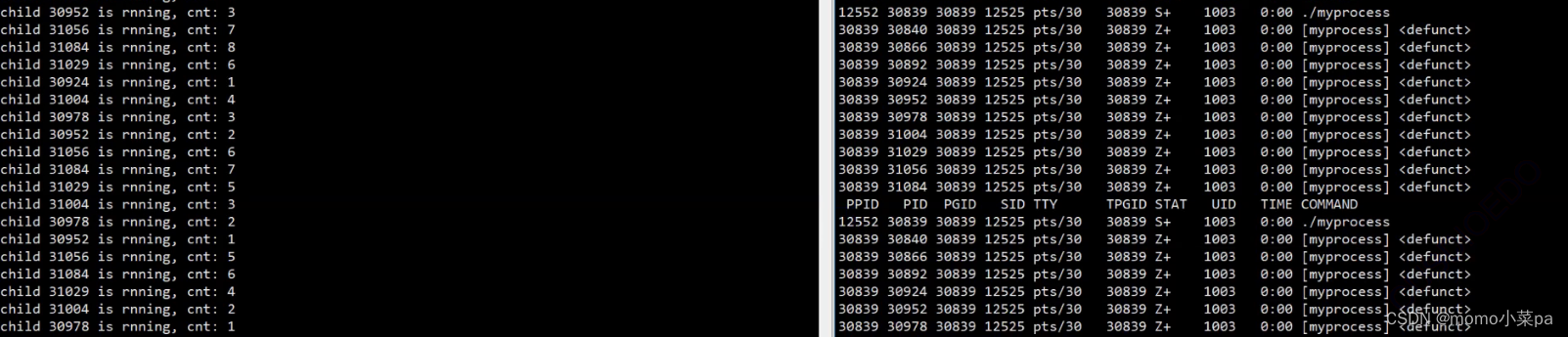
Linux--进程(1)
目录 前言 1.冯诺依曼体系结构 2. 操作系统(Operator System)--第一个被加载的软件 3.进程 3.1基本概念 3.2Linux中的PCB 3.3通过系统调用创建子进程-fork初识 fork:创建一个子进程 为什么要创建子进程? fork的原理: 进一步了解fo…...

Qt登录页面
#include "mywidget.h" #include "ui_mywidget.h"MyWidget::MyWidget(QWidget *parent): QWidget(parent), ui(new Ui::MyWidget) {ui->setupUi(this);//接收动图QMovie *mv new QMovie(":/pictrue/luori.gif");ui->loglab->setMovie(…...

软件工程-第8章 软件测试
8.1 软件测试目标域软件测试过程模型 8.2 软件测试技术 8.3 静态分析技术-程序正确性证明 8.4 软件测试步骤 8.5 本章小结...

专业135+总分400+重庆邮电大学801信号与系统考研经验重邮电子信息与通信工程,真题,大纲,参考书。
今年分数出来还是比较满意,专业801信号与系统135,总分400,没想到自己也可以考出400以上的分数,一年的努力付出都是值得的,总结一下自己的复习心得,希望对大家复习有所帮助。专业课:(…...

主干网络篇 | YOLOv8改进之在主干网络中引入密集连接卷积网络DenseNet
前言:Hello大家好,我是小哥谈。DenseNet(密集连接卷积网络)是一种深度学习神经网络架构,它在2017年由Gao Huang等人提出。DenseNet的核心思想是通过密集连接(dense connection)来促进信息的流动和共享。在传统的卷积神经网络中,每个层的输入只来自于前一层的输出。而在…...

lavarel的php程序是顺序执行,用pdo mysql连接池好像没有什么用啊。没有办法挂起等待啊,为什么要用连接池,应用场景是什么
Laravel 的 PHP 程序确实是基于请求-响应模式,每个请求都是顺序执行的。这意味着一旦一个请求开始处理,它会按照代码的顺序执行,直到完成并返回响应。因此,从表面上看,使用 PDO 或 MySQL 连接池在 Laravel 中可能看起来…...
)
别再手动测模型了!用Simulink Test Manager实现自动化测试(附Excel表格配置详解)
从手动测试到智能验证:Simulink Test Manager全流程自动化实战指南 在模型开发的迭代过程中,工程师们常常陷入"修改-测试-记录"的循环泥潭。每次参数调整后,手动运行模型、记录数据、比对结果不仅消耗大量时间,更可能因…...

超低功耗电池电压监控电路设计:从LM324到LPV324的硬件方案优化
1. 项目概述与核心需求解析在捣鼓各种电池供电的电子设备时,无论是自己做的无线传感器节点、便携式小工具,还是给孩子改装的玩具,有一个问题总是绕不开:你怎么知道电池快没电了?总不能每次都等到设备彻底罢工ÿ…...

不止于绘图:用GMT 6.4的`grdtrack`和`project`命令玩转地形剖面分析与可视化
不止于绘图:用GMT 6.4的grdtrack和project命令玩转地形剖面分析与可视化 当我们谈论地理空间分析时,很多人首先想到的是绘制精美的地图。但GMT(Generic Mapping Tools)的真正魅力在于它强大的地理计算能力。本文将带你超越基础绘图…...

AI算法工程师如何进行数据预处理?这5个步骤让你的数据更优质
在AI模型开发与测试的全流程中,数据质量直接决定了最终模型的效果上限——哪怕是最先进的大语言模型,用劣质数据训练出来也只能输出劣质结果。对于软件测试从业者来说,不管是参与AI模型的功能测试、性能测试,还是负责测试数据集的…...
)
别再手动改代码了!用Vivado的VIO IP核实时调试你的FPGA设计(附UART实例)
实时交互式FPGA调试革命:Vivado VIO核的UART实战指南 调试FPGA设计时,你是否经历过这样的痛苦循环:修改一行代码→全编译→下载比特流→测试→发现问题→再修改...这种"石器时代"的工作流正在吞噬工程师的创造力。Xilinx Vivado中的…...

用Arduino改造TDA7010T FM收音机:数字调谐与自动搜台实战
1. 项目概述:当复古芯片遇上现代微控制器翻出抽屉角落里那个积灰的Kemo B156N套件时,我压根没想到它会变成一个如此有趣的周末项目。这个套件的核心,是一颗来自上世纪八十年代的FM收音机芯片——TDA7010T。当年,它和它的前身TDA70…...

从零开始掌握MuSiC:单细胞RNA测序反卷积的完整指南
从零开始掌握MuSiC:单细胞RNA测序反卷积的完整指南 【免费下载链接】MuSiC Multi-subject Single Cell Deconvolution 项目地址: https://gitcode.com/gh_mirrors/music2/MuSiC 还在为复杂的单细胞数据分析而烦恼吗?想要从批量RNA测序数据中准确识…...

GraphpostgresQL高级用法:JSON、JSONB和HStore复杂数据类型的查询技巧
GraphpostgresQL高级用法:JSON、JSONB和HStore复杂数据类型的查询技巧 【免费下载链接】GraphpostgresQL GraphQL for Postgres 项目地址: https://gitcode.com/gh_mirrors/gr/GraphpostgresQL GraphpostgresQL作为PostgreSQL的GraphQL扩展,为开发…...

KMS智能激活工具:如何一键永久激活Windows和Office的完整指南
KMS智能激活工具:如何一键永久激活Windows和Office的完整指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows和Office激活问题而烦恼吗?每次系统重装后都要…...

技术指南:qobuz-dl无损音乐下载器架构解析与实战应用
技术指南:qobuz-dl无损音乐下载器架构解析与实战应用 【免费下载链接】qobuz-dl A complete Lossless and Hi-Res music downloader for Qobuz 项目地址: https://gitcode.com/gh_mirrors/qo/qobuz-dl 在数字音乐时代,音质追求者面临着一个核心矛…...