单线激光雷达(SICK)驱动安装及时空标定
一、引言
1、AGV需要同时具备定位、避障与导航的功能,其中避障对于雷达本身的分辨率、精度要求并不是很高,只需要能够根据预设定的雷达扫描范围准确避开障碍物即可,故本文以TIM240(SICK激光类雷达)为例介绍实现多雷达时空标定的问题。
2、多个避障雷达可能会被安装在车体各个位置,并且不一定有重叠区域,所以通过提取特征点再进行ICP或NDT配准的方法获取相对位姿变换关系的方式不可行,由于机械结构本身已经按照设计图纸预先设置好雷达的安装位置,所以雷达之间的相对位置关系相对准确,故可以直接利用已有参数可以进行雷达空间标定,将两个雷达数据统一到同一个坐标系下进行,需要用到PCL库。
3、坐标变换实际使用过程当中确实可以用tf进行静态坐标变换,但是相比较直接手动写代码进行转换延迟较高,故采用手动根据相对位置关系进行坐标变换的方式。
4、进行时空标定步骤主要分为:(1)驱动安装及雷达参数配置(2)雷达时间同步(3)雷达空间同步(Rp+T,这里的旋转矩阵和平移矩阵的定义后文会给出)
二、整体思路与流程
1、SICK激光雷达驱动安装
新买的SICK雷达不仅需要安装驱动,还需要进配置文件修改参数才能正常工作
(1)安装驱动
mkdir -p ./sick_scan_ws
cd ./sick_scan_wsmkdir ./src
pushd ./src
git clone https://ghproxy.com/https://github.com/SICKAG/libsick_ldmrs.git
git clone https://ghproxy.com/https://github.com/SICKAG/msgpack11.git
git clone https://ghproxy.com/https://github.com/SICKAG/sick_scan_xd.git
popdmkdir -p ./build/msgpack11
pushd ./build/msgpack11
cmake -G "Unix Makefiles" -D CMAKE_CXX_FLAGS=-fPIC -D CMAKE_BUILD_TYPE=Release -D MSGPACK11_BUILD_TESTS=0 ../../src/msgpack11
make
sudo make install
popdsource /opt/ros/melodic/setup.bash # replace noetic by your ros distro
catkin_make_isolated --install --cmake-args -DROS_VERSION=1 -Wno-dev
source ./devel_isolated/setup.bash
(2)雷达配置文件修改
1)首先需要设置PC机的以太网ip端口号如:192.168.0.2
2)SICK官网下载sopas软件,在Windows端使用(用Win10系统,Win11有问题)
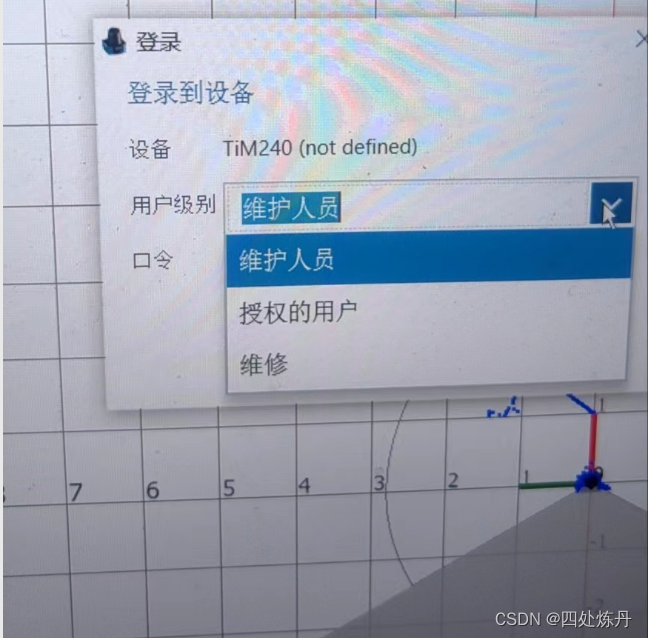
3)进入软件,修改登录权限为授权的用户,密码是client
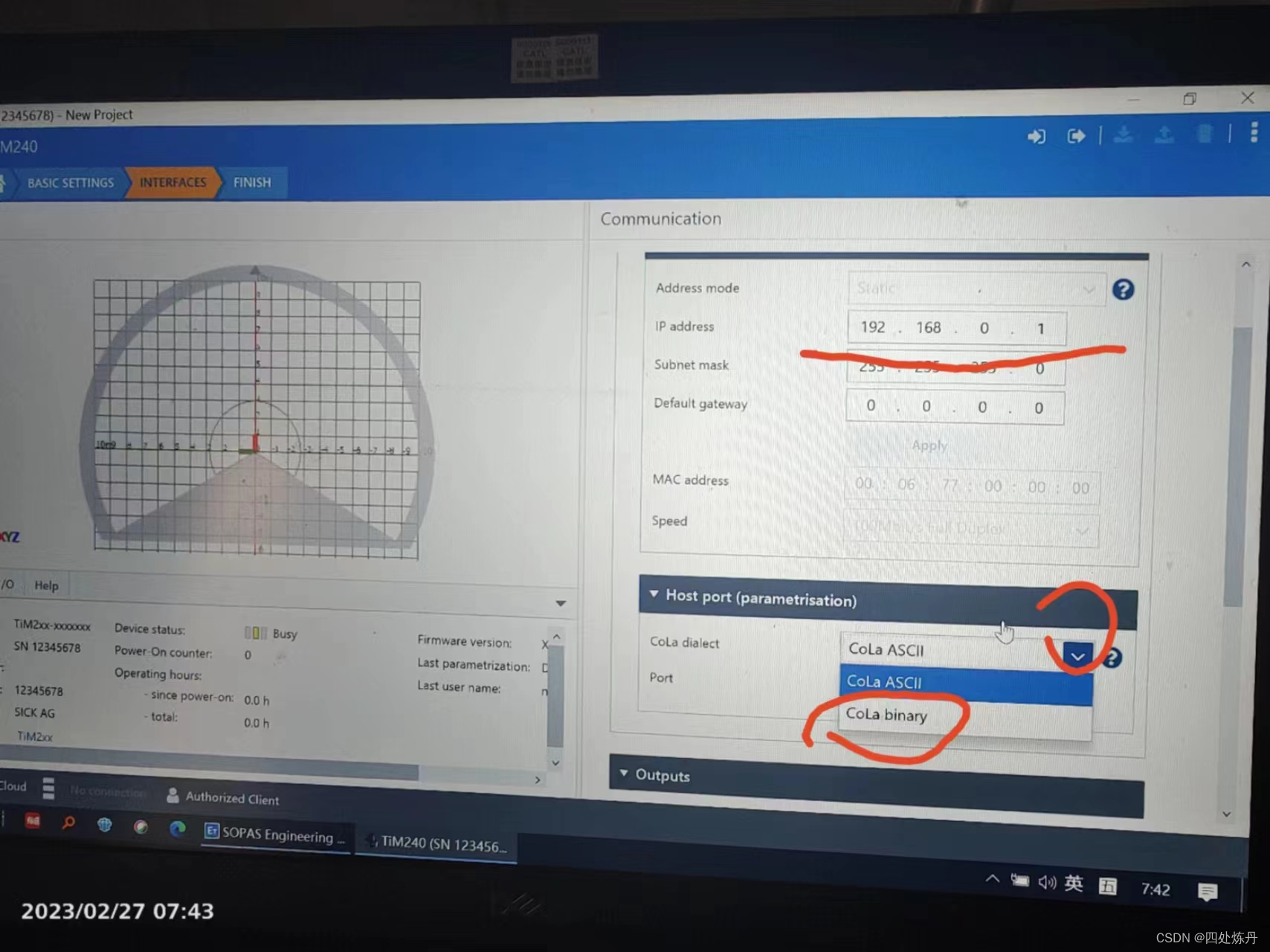
4)修改雷达ip(与PC机同一网段即可,192.168.0.1以及Cola dialect改为cola binary格式。此处修改雷达ip是为了保证两个雷达能同时使用
(3)硬件组装
需要交换机、电源模块、电源线(普通的家庭供电线就可以,火线为棕灰色、地线为黄绿双色、零线为蓝色,分别对应接到电源模块的L端、FG端、N端)、供电线、网线,如下图连接示意图

(4)修改雷达启动文件(launch),需要创建两个启动文件,分别对应不同ip的雷达,我这里设置一个ip为192.168.0.1,一个为192.168.0.3,因为PC的ip为192.168.0.2
<?xml version="1.0"?>
<!--**********************************************Launch File for TIM 240 scanner**********************************************Start and stop angle is given in [rad]Check IP-address, if you scanner is not found after roslaunch.
--><!-- You can launch a TIM_240-scanner on a specific ip address (e.g. 192.68.0.71) using the following example call:roslaunch sick_scan sick_tim_240.launch hostname:=192.168.0.71-->
<!-- Using node option required="true" will close roslaunch after node exits --><launch><arg name="hostname" default="192.168.0.1"/><arg name="port" default="2111"/><arg name="cloud_topic" default="cloud1"/><arg name="frame_id" default="cloud1"/><arg name="sw_pll_only_publish" default="true"/><arg name="nodename" default="sick_tim_240_1"/><arg name="add_transform_xyz_rpy" default="0,0,0,0,0,0"/><arg name="add_transform_check_dynamic_updates" default="false"/> <!-- Note: dynamical updates of parameter add_transform_xyz_rpy can decrease the performance and is therefor deactivated by default --><node name="$(arg nodename)" pkg="sick_scan" type="sick_generic_caller" respawn="false" output="screen" required="true"><param name="scanner_type" type="string" value="sick_tim_240"/><!-- datagram shows values from -90 ... 120 (211 values) --><!-- -120 deg --><param name="min_ang" type="double" value="-2.094395102"/><!-- 120 deg --><param name="max_ang" type="double" value="+2.094395102"/><!-- corresponds to 1.0/(14.4 * 360) --><param name="time_increment" type="double" value="0.00019290123"/><param name="use_binary_protocol" type="bool" value="True"/><param name="intensity" type="bool" value="true"/><param name="intensity_resolution_16bit" type="bool" value="true"/><param name="hostname" type="string" value="$(arg hostname)"/><param name="cloud_topic" type="string" value="$(arg cloud_topic)"/><param name="frame_id" type="str" value="$(arg frame_id)"/><param name="port" type="string" value="$(arg port)"/><param name="timelimit" type="int" value="5"/><param name="sw_pll_only_publish" type="bool" value="$(arg sw_pll_only_publish)"/><param name="use_generation_timestamp" type="bool" value="true"/> <!-- Use the lidar generation timestamp (true, default) or send timestamp (false) for the software pll converted message timestamp --><param name="min_intensity" type="double" value="0.0"/> <!-- Set range of LaserScan messages to infinity, if intensity < min_intensity (default: 0) --><!-- Optional range filter configuration: If the range of a scan point is less than range_min or greater than range_max, the point can be filtered. --><!-- Depending on parameter range_filter_handling, the following filter can be applied for points with a range not within [range_min, range_max], --><!-- see enumeration RangeFilterResultHandling in range_filter.h: --><!-- 0: RANGE_FILTER_DEACTIVATED, do not apply range filter (default) --><!-- 1: RANGE_FILTER_DROP, drop point, if range is not within [range_min, range_max] --><!-- 2: RANGE_FILTER_TO_ZERO, set range to 0, if range is not within [range_min, range_max] --><!-- 3: RANGE_FILTER_TO_RANGE_MAX, set range to range_max, if range is not within [range_min, range_max] --><!-- 4: RANGE_FILTER_TO_FLT_MAX, set range to FLT_MAX, if range is not within [range_min, range_max] --><!-- 5: RANGE_FILTER_TO_NAN set range to NAN, if range is not within [range_min, range_max] --><!-- Note: Range filter applies only to Pointcloud messages, not to LaserScan messages. --><!-- Using range_filter_handling 4 or 5 requires handling of FLT_MAX and NAN values in an application. --><param name="range_min" type="double" value="0.0"/><param name="range_max" type="double" value="100.0"/><param name="range_filter_handling" type="int" value="0"/><!-- Apply an additional transform to the cartesian pointcloud, default: "0,0,0,0,0,0" (i.e. no transform) --><!-- Note: add_transform_xyz_rpy is specified by 6D pose x, y, z, roll, pitch, yaw in [m] resp. [rad] --><!-- It transforms a 3D point in cloud coordinates to 3D point in user defined world coordinates: --> <!-- add_transform_xyz_rpy := T[world,cloud] with parent "world" and child "cloud", i.e. P_world = T[world,cloud] * P_cloud --><!-- The additional transform applies to cartesian lidar pointclouds and visualization marker (fields) --><!-- It is NOT applied to polar pointclouds, radarscans, ldmrs objects or other messages --><param name="add_transform_xyz_rpy" type="string" value="$(arg add_transform_xyz_rpy)" /> <param name="add_transform_check_dynamic_updates" type="bool" value="$(arg add_transform_check_dynamic_updates)" /><param name="start_services" type="bool" value="True" /> <!-- Start ros service for cola commands, default: true --><param name="message_monitoring_enabled" type="bool" value="True" /> <!-- Enable message monitoring with reconnect+reinit in case of timeouts, default: true --><param name="read_timeout_millisec_default" type="int" value="5000"/> <!-- 5 sec read timeout in operational mode (measurement mode), default: 5000 milliseconds --><param name="read_timeout_millisec_startup" type="int" value="120000"/> <!-- 120 sec read timeout during startup (sensor may be starting up, which can take up to 120 sec.), default: 120000 milliseconds --><param name="read_timeout_millisec_kill_node" type="int" value="150000"/> <!-- 150 sec pointcloud timeout, ros node will be killed if no point cloud published within the last 150 sec., default: 150000 milliseconds --><param name="client_authorization_pw" type="string" value="F4724744"/> <!-- Default password for client authorization --><!-- Configuration of ROS quality of service: --><!-- On ROS-1, parameter "ros_qos" sets the queue_size of ros publisher --><!-- On ROS-2, parameter "ros_qos" sets the QoS of ros publisher to one of the following predefined values: --><!-- 0: rclcpp::SystemDefaultsQoS(), 1: rclcpp::ParameterEventsQoS(), 2: rclcpp::ServicesQoS(), 3: rclcpp::ParametersQoS(), 4: rclcpp::SensorDataQoS() --><!-- See e.g. https://docs.ros2.org/dashing/api/rclcpp/classrclcpp_1_1QoS.html#ad7e932d8e2f636c80eff674546ec3963 for further details about ROS2 QoS --><!-- Default value is -1, i.e. queue_size=10 on ROS-1 resp. qos=rclcpp::SystemDefaultsQoS() on ROS-2 is used.--><param name="ros_qos" type="int" value="-1"/> <!-- Default QoS=-1, i.e. do not overwrite, use queue_size=10 on ROS-1 resp. qos=rclcpp::SystemDefaultsQoS() on ROS-2 --></node>
</launch>2、SICK激光雷达时间同步
主要使用ros官方提供的软同步方式(message_filters)
使用方式如下:
ros::Publisher pointcloud_pub;
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::PointCloud2, sensor_msgs::PointCloud2> testSyncPolicy;void callback(const sensor_msgs::PointCloud2ConstPtr &point1, const sensor_msgs::PointCloud2ConstPtr &point2) //回调中包含多个消息
{//需要处理的内容//
}int main (int argc, char **argv)
{ros::init (argc, argv, "lidar2base");ros::NodeHandle n;pointcloud_pub = n.advertise<sensor_msgs::LaserScan>("/scan", 1000);//发布的话题message_filters::Subscriber<sensor_msgs::PointCloud2> pointcloud1_sub(n, "/cloud1", 1);// 需要同步的topic1message_filters::Subscriber<sensor_msgs::PointCloud2> pointcloud2_sub(n, "/cloud2", 1);// 需要同步的topic2 message_filters::Synchronizer<testSyncPolicy> sync(testSyncPolicy(10), pointcloud1_sub, pointcloud2_sub);// 同步sync.registerCallback(boost::bind(&callback, _1, _2));ros::spin();ros::shutdown();return 0;
}3、SICK激光雷达空间同步
主要是通过雷达之间的旋转和平移参数将两个雷达数据统一到一个坐标系下再使用PCL库对雷达数据进行融合,这里编写了相关函数
//坐标变换将激光雷达坐标系下的点转换到小车坐标系下
void transPoint(pcl::PointCloud<pcl::PointXYZ>::Ptr lidarCloud,pcl::PointCloud<pcl::PointXYZ>::Ptr carCloud,double yaw,double pitch,double roll,double x,double y,double z)
{Eigen::Matrix4f transform=Eigen::Matrix4f::Identity();Eigen::Matrix4f transformYaw;Eigen::Matrix4f transformPitch;Eigen::Matrix4f transformRoll;//航向角transformYaw<<cos(yaw),-sin(yaw),0,0,\sin(yaw),cos(yaw),0,0,\0,0,1,0,\0,0,0,1;//俯仰角transformPitch<<cos(pitch),0,sin(pitch),0,\0,1,0,0,\-sin(pitch),0,cos(pitch),0,\0,0,0,1;//横滚角transformRoll<<1,0,0,0,\0,cos(roll),-sin(roll),0,\0,sin(roll),cos(roll),0,\0,0,0,1;//旋转矩阵transform=transformRoll*transformPitch*transformYaw;//平移矩阵transform(0,3)=x;transform(1,3)=y;transform(2,3)=z;//坐标转换pcl::transformPointCloud(*lidarCloud,*carCloud,transform);
}
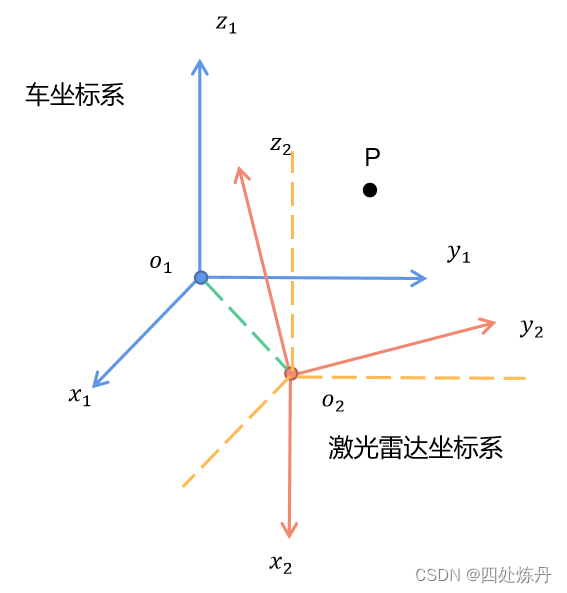
如下图:
需求是通过上述函数将P点从激光雷达坐标系变换到车体坐标系,函数的输入分别为偏航角yaw, pitch, roll,x,y,z
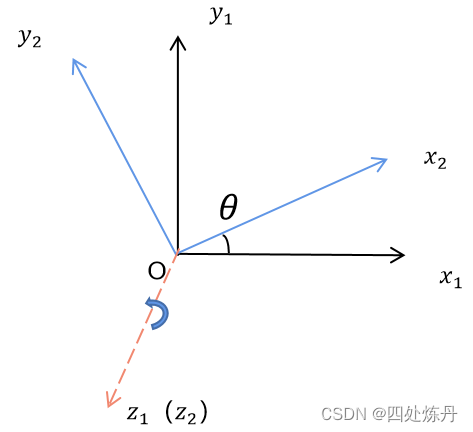
偏航角yaw的获取方式是:以车坐标系为右手基准坐标系,大拇指指向为z轴正方向,激光雷达系为目标坐标系,顺时针旋转z轴的角度分量为yaw的值,图中x1Oy1为车体坐标系。
同理俯仰角pictch为绕y轴旋转角度分量,横滚角roll为绕x轴的分量。
平移分量(x, y, z)是激光雷达相对于车体坐标原点的x,y,z的坐标。
 4、雷达数据融合
4、雷达数据融合
需要将ros的PointCloud2类型数据转换为PCL数据类型,而后将PCL数据类型转为ros的LaserScan数据类型。
1)数据融合主要在SICK激光雷达时间同步这一部分的回调函数中写:
pcl::PointCloud<pcl::PointXYZ>::Ptr colorcloud1(new pcl::PointCloud<pcl::PointXYZ>);pcl::fromROSMsg(*point1, *colorcloud1);pcl::PointCloud<pcl::PointXYZ>::Ptr colorcloud2(new pcl::PointCloud<pcl::PointXYZ>);pcl::fromROSMsg(*point2, *colorcloud2);pcl::PointCloud<pcl::PointXYZ>::Ptr output_points1(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr output_points2(new pcl::PointCloud<pcl::PointXYZ>);transPoint(colorcloud1, output_points1, yaw1, pitch1, roll1, x1, y11, z1);transPoint(colorcloud2, output_points2, yaw2, pitch2, roll2, x2, y2, z2);pcl::PointCloud<pcl::PointXYZ> output = *output_points1 + *output_points2;//pcl::toROSMsg((*output_points1 + *output_points2), output);//以实时发布的方式发布sensor_msgs::LaserScan output2 = PointCloudToLaserscan(output);output2.header.frame_id = "base_link";pointcloud_pub.publish(output2);2)PCL转LaserScan单独写了一个函数
sensor_msgs::LaserScan PointCloudToLaserscan(pcl::PointCloud<pcl::PointXYZ>& _pointcloud)
{float angle_min, angle_max, range_min, range_max, angle_increment;//需要自行调整的参数angle_min = -2.094395102;angle_max = 2.094395102;range_min = 0.05;range_max = 10;//角度分辨率,分辨率越小,转换后的误差越小angle_increment = 0.0174444444;//计算扫描点个数unsigned int beam_size = ceil((angle_max - angle_min) / angle_increment);sensor_msgs::LaserScan output;output.header.stamp = ros::Time::now();output.header.frame_id = "base_link";output.angle_min = angle_min;output.angle_max = angle_max;output.range_min = range_min;output.range_max = range_max;output.angle_increment = angle_increment;output.time_increment = 0.0;output.scan_time = 0.0;//先将所有数据用nan填充output.ranges.assign(beam_size, std::numeric_limits<float>::quiet_NaN());//output.intensities.assign(beam_size, std::numeric_limits<float>::quiet_NaN());for (auto point : _pointcloud.points){float range = hypot(point.x, point.y);float angle = atan2(point.y, point.x);int index = (int)((angle - output.angle_min) / output.angle_increment);if (index >= 0 && index < beam_size){//如果当前内容为nan,则直接赋值if (isnan(output.ranges[index])){output.ranges[index] = range;}//否则,只有距离小于当前值时,才可以重新赋值else{if (range < output.ranges[index]){output.ranges[index] = range;}}//output.intensities[index] = point.intensity;}}return output;
}
5、创建启动脚本
首先启动两个雷达,其次启动坐标转换的脚本,即可实现两个雷达的时空同步
#!/bin/bash
gnome-terminal --tab -- bash -c "roslaunch sick_scan sick_tim_240_1.launch"
sleep 1s
gnome-terminal --tab -- bash -c "roslaunch sick_scan sick_tim_240_2.launch "
sleep 2s
gnome-terminal --tab -- bash -c "source /home/lixushi/catkin_ws/devel/setup.bash; roslaunch lidar2base lidar2base.launch"
如下图为雷达实际摆放位置

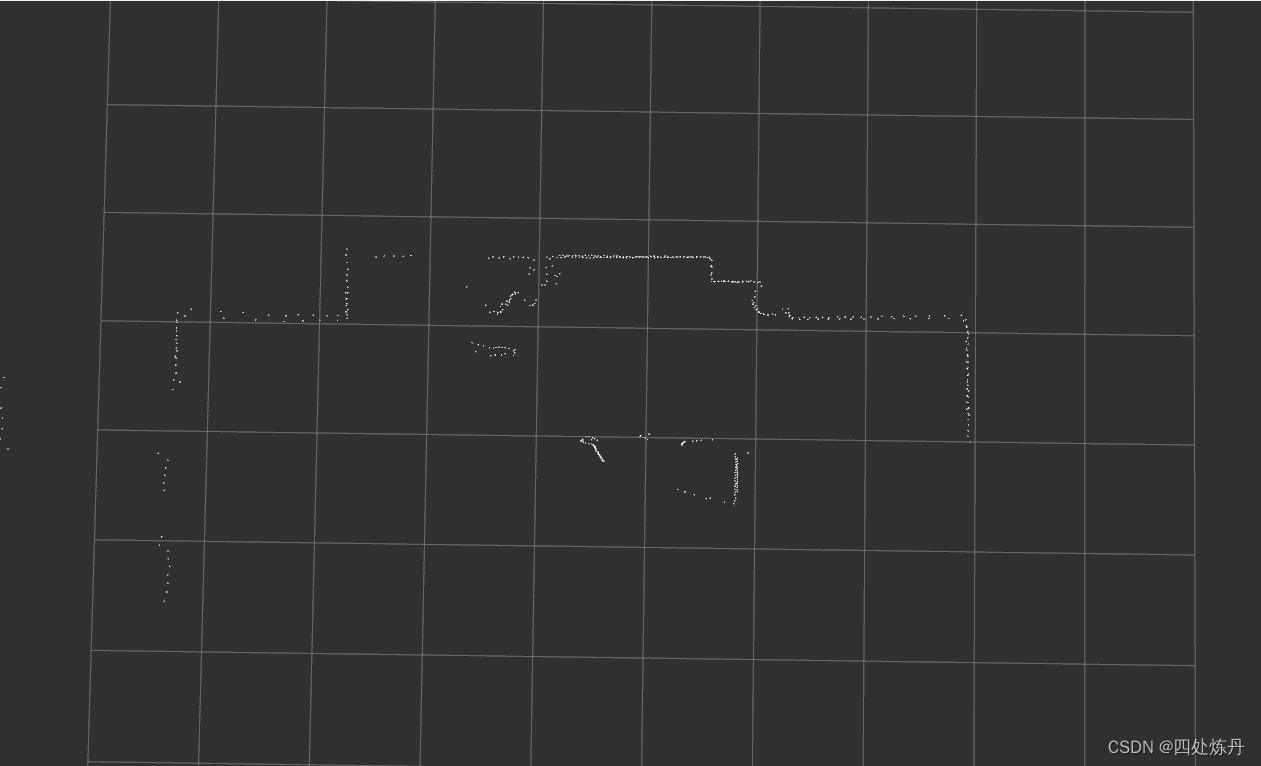
转换前的点云图

转换后的点云图
三、参考文献
[1] https://blog.csdn.net/m0_68312479/article/details/128266483
[2] https://blog.csdn.net/hltt3838/article/details/123067620
[3] https://blog.csdn.net/m0_68312479/article/details/128266483
[4] https://adamshan.blog.csdn.net/article/details/105930565?spm=1001.2014.3001.5502
[5] https://mp.weixin.qq.com/s?__biz=MzU1NjEwMTY0Mw==&mid=2247556040&idx=1&sn=fa1f7cc63f7aeeaed69242add86efd75&chksm=fbc862acccbfebba12fd29cef32b7a34ac296f54e8ef6f19485aff81ebddd794a3364419c90b&scene=27
相关文章:
单线激光雷达(SICK)驱动安装及时空标定
一、引言 1、AGV需要同时具备定位、避障与导航的功能,其中避障对于雷达本身的分辨率、精度要求并不是很高,只需要能够根据预设定的雷达扫描范围准确避开障碍物即可,故本文以TIM240(SICK激光类雷达)为例介绍实现多雷达…...

Java IO流
Java IO流 文章目录Java IO流什么是IO流InputStreamFlieInputStream示例OutputStream示例字符的读取与写入READER方法WRITER方法利用Scanner和PrintWriter简化字符的读写ScannerPrintWriter什么是IO流 前面我们介绍了Java中对文件的操作以及file类的了解,但是file类…...
LeetCode - 1653 使字符串平衡的最少删除次数
目录 题目来源 题目描述 示例 提示 题目解析 算法源码 题目来源 1653. 使字符串平衡的最少删除次数 - 力扣(LeetCode) 题目描述 给你一个字符串 s ,它仅包含字符 a 和 b 。 你可以删除 s 中任意数目的字符,使得 …...

【微信小程序】-- 页面事件 - 上拉触底 - 案例(二十七)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...
)
《超导电子技术及其应用》学习日志(二)
约瑟夫森效应 约瑟夫森理论 约瑟夫森方程 (1)每一个库柏对都可视为质量为2m、电量为2e的复合载流子,定向运动速度v就是库柏相对质心的速度。处于超导态的库柏对凝聚于同一量子态,运载电流时具有完全相同的动量P。用微观波函数来…...

微信小程序this指向问题
前言 最近在开发微信小程序时不时会遇到一个很奇怪的问题,有些情况下用 this.setData 可以改变视图显示,有些情况下使用 this.setData 无效,这又是为什么呢? 问题描述 在解释这个问题前,我们先来看两段代码࿱…...

【报错】paddle相关报错和处理方法
1 报错 😱😱😱 ModuleNotFoundError: No module named paddle 2 解决方法 💉💉💉 pip --default-timeout=100 install paddlepaddle -i http://pypi.douban.com/simple --trusted-host pypi.douban.com 🎉🎉🎉🎉🎉🎉 1 报错 😱😱😱 from paddl…...

unity的安装配置和第一个游戏-unity开学第一课
许多的小伙伴学编程语言其实是因为玩游戏,玩着玩着就想写游戏了,于是开始学习c学习C#学习java,但相比之下C#的操作会更加容易,所以就开始学习unity来编游戏了。这里就就算是unity开学第一课啦-unity的安装配置和第一个游戏。 文章…...

Elsevier上传LaTeX 修改稿踩坑
背景 千辛万苦修改完论文,结果发现要求上传可编辑文件,tex上传真的太难了,一堆坑,尤其是编译错误,要等系统创建pdf后才能找到。中间还打了北京的客服电话,结果他们那边并不懂相关的东西。说latex是第三方公…...

秒懂算法 | 搜索基础
本篇介绍了BFS和DFS的概念、性质、模板代码。 01、搜索简介 搜索,就是查找解空间,它是“暴力法”算法思想的具体实现。 暴力法(Brute force,又译为蛮力法):把所有可能的情况都罗列出来,然后逐一检查,从中找到答案。这种方法简单、直接,不玩花样,利用了计算机强大的…...

Flutter 自定义今日头条版本的组件,及底部按钮切换静态样式
这里写目录标题1. 左右滑动实现标题切换,点击标题也可实现切换;2. 自定义KeepAliveWrapper 缓存页面;2.2 使用3. 底部导航切换;4. 自定义中间大导航;5.AppBar自定义顶部按钮图标、颜色6. Tabbar TabBarView实现类似头条…...
SpringBoot学习笔记(二)配置文件
1、配置文件SpringBoot使用一个全局的配置文件,配置文件名是固定的;application.propertiesapplication.yml配置文件的作用:修改SpringBoot自动配置的默认值;SpringBoot在底层都给我们自动配置好;YAML:以数…...

09说说乐观锁和悲观锁
乐观锁和悲观锁是在并发编程中经常用到的两种锁机制。悲观锁是指在访问共享资源之前,会先加锁,以防止其他线程修改该资源,从而保证数据的一致性和完整性。在使用悲观锁时,如果一个线程已经占用了该资源,那么其他线程只…...

【C++】vector的模拟实现
文章目录1.查看STL源码2.vector的模拟实现1. 构造函数无参构造构造n个 val迭代器模板2. reserve3. 迭代器4.pop_back 尾删5.resize6.push_back7.insert迭代器失效—— pos为野指针迭代器失效——修改迭代器位置8. erase对于VS和Linux环境测试3.深浅拷贝问题4. 整体代码实现1.查…...

THUPC-2023 游记
清华校赛,战火重燃 原文链接 宣传图 上周四同学在洛谷无意间看到了宣传图,当时很有感触。不知觉间,又是一年春,又是一场触动心弦的 THUPC 了。 周五的团建过于有趣,致使我完全将 THUPC 抛之脑后了。 周日上午被省选…...

Linux - 磁盘I/O性能评估
文章目录概述RAID文件系统与裸设备的对比磁盘I/O性能评判标准常用命令“sar –d”命令组合“iostat –d”命令组合“iostat –x”单独统计某个磁盘的I/O“vmstat –d”命令组合小结概述 RAID 可以根据应用的不同,选择不同的RAID方式 如果一个应用经常有大量的读操…...

计算机网络--网络基础
目录 一.互联网的组成 编辑 1.互联网的边缘部分 1.1客户-服务器方式 1.2对等连接方式 编辑 2.互联网的核心部分 2.1电路交换 2.2分组交换 2.3报文交换 二.计算机网络的类别 1.按网络的作用范围进行分类 2.按网络的使用者进行分类 3.用来把用户接入互联…...

Gin 接口超时控制
文章目录1.Gin 的 Middleware2.gin-contrib/timeout3.小结参考文献API 是现代应用程序中的重要组成部分,可以用于提供数据和功能,供客户端应用程序访问。由于网络不稳定、服务器负载、网络拥堵等因素,API 请求可能会花费较长时间。这可能导致…...

1.C#与.NET简介
目录 一、C#语言及其特点 二、C#与.NET Framework/.NET Core关系 三、C#应用开发 四、案例展示 五、学习环境 一、C#语言及其特点 C#是美国微软公司发布的一种面向对象的,运行于 .NET Framework 和 .NET Core (完全开源,跨平台ÿ…...
OpenAI CTO、吴恩达夫人……AI 领域值得关注的「她」力量,个个都是女强人
内容一览: 「她时代」来临,一些有着强大信念与热情的女性,纷纷投身至 AI 领域,成为不可或缺的存在与力量。值此国际妇女节到来之际,HyperAI超神经盘点了领域内令人印象深刻的杰出的女性代表。 关键词:国际妇…...

底特律汽车产业转型:从全球平台战略到创新生态重构
1. 从废墟中重生:底特律汽车产业的韧性复苏如果你在2010年前后关注过全球汽车产业,或者对美国的工业经济史稍有了解,那么“底特律”这个名字,在当时几乎就是“衰败”与“绝望”的同义词。这座曾经的“汽车之城”,在200…...

EdgeDB监控告警:生产环境运维监控体系构建终极指南
EdgeDB监控告警:生产环境运维监控体系构建终极指南 【免费下载链接】edgedb Gel supercharges Postgres with a modern data model, graph queries, Auth & AI solutions, and much more. 项目地址: https://gitcode.com/gh_mirrors/ed/edgedb EdgeDB是一…...

别再只会点F2了!Trace32调试实战:从连接脚本到高效单步的保姆级避坑指南
别再只会点F2了!Trace32调试实战:从连接脚本到高效单步的保姆级避坑指南 当你面对一块新板卡,调试器连接时断时续,代码加载后莫名其妙跑飞,单步执行时总在循环里打转——这时候才明白,Trace32的F2键只是调试…...

从锂电池热失控到锡须短路:高可靠性系统安全工程实践
1. 从“工程恐怖故事”到系统安全文化的反思最近在整理资料时,翻到一篇十多年前的旧文,标题叫《工程恐怖:机毁人亡》。文章汇集了几位航空与国防领域工程师亲历的、令人脊背发凉的真实事故案例。这些故事没有出现在主流新闻的头条,…...

3D Tiles Tools终极指南:如何快速掌握3D模型格式转换与优化
3D Tiles Tools终极指南:如何快速掌握3D模型格式转换与优化 【免费下载链接】3d-tiles-tools 项目地址: https://gitcode.com/gh_mirrors/3d/3d-tiles-tools 在3D地理空间数据可视化领域,3D Tiles Tools是一套功能强大的开源工具集,专…...

3步打造专属桌面歌词体验:LyricsX macOS歌词神器完全指南
3步打造专属桌面歌词体验:LyricsX macOS歌词神器完全指南 【免费下载链接】Lyrics Swift-based iTunes plug-in to display lyrics on the desktop. 项目地址: https://gitcode.com/gh_mirrors/lyr/Lyrics LyricsX是一款专为macOS用户设计的开源桌面歌词显示…...

从QR码到汉信码:盘点那些你可能没听过的二维码‘家族成员’及其应用场景
从QR码到汉信码:盘点那些你可能没听过的二维码‘家族成员’及其应用场景 在移动支付和数字营销的推动下,QR码已成为现代生活中不可或缺的一部分。然而,这个看似简单的黑白方块背后,隐藏着一个庞大而复杂的技术家族。从超市商品标…...

【2026实测】直击算法底层逻辑:论文AI率太高?5款工具与3大手改技巧盘点
最近不少学弟学妹在后台跟我倒苦水,说查重率好不容易低了,结果AI率越改越高。眼看临近DDL,生怕又因为这个耽误答辩。 作为已经摸爬滚打出来的老学长,今天我就根据我总结出来的经验,从检测系统的底层逻辑开始讲起&…...

ScrollNice:用虚拟滚动区域替代鼠标滚轮的Windows效率工具
1. 项目概述:当鼠标滚轮失灵时,我们如何优雅地“滚动”?作为一名长期与代码和文档打交道的开发者,我深知一个顺手的鼠标滚轮有多重要。但现实往往很骨感——无论是用了多年的老鼠标滚轮开始“打滑”,还是在某些需要单手…...

自动驾驶安全迷思:从94%人为错误统计到ADAS与系统安全工程实践
1. 项目概述:一场关于自动驾驶安全统计数据的“祛魅”如果你最近几年关注过自动驾驶或者高级驾驶辅助系统的新闻,大概率听过一个被反复引用的“金科玉律”:94%的交通事故是由人为错误造成的。这个数字像一句魔咒,被无数自动驾驶公…...