OAK深度相机使用不同镜头和本地视频流进行模型推理
编辑:OAK中国
首发:oakchina.cn
喜欢的话,请多多👍⭐️✍
内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。
▌前言
Hello,大家好,这里是OAK中国,我是助手君。
最近朋友们有几条共性的问题,比如:
- 为啥检测框在深度图位置不对啊?
- 能不能将本地视频流作为输入啊?
- 能不能加上测距啊?
这篇博客总结了所有这些问题的参考代码,欢迎三连食用~
使用 oak 的
LEFT,RIGHT和RGB相机和视频流VIDEO进行 YOLO 检测
▌RGB
使用 RGB 相机作为输入源
...
camRgb = pipeline.create(dai.node.ColorCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
...
camRgb.setPreviewSize(W, H)
...
camRgb.preview.link(detectionNetwork.input)
...
详见:yolov6-rgb.py
▌RGB + DEPTH
使用 RGB 相机作为输入源,并附加深度信息
...
camRgb = pipeline.create(dai.node.ColorCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
stereo = pipeline.create(dai.node.StereoDepth)
...
camRgb.setPreviewSize(W, H)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# 将深度图与 RGB 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.CameraBoardSocket.RGB)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)camRgb.preview.link(spatialDetectionNetwork.input)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-rgb-spatial.py
▌RIGHT
使用 RIGHT 相机作为输入源
...
monoRight = pipeline.create(dai.node.MonoCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
monoRight.out.link(imageManip.inputImage)
imageManip.out.link(detectionNetwork.input)
...
详见:yolov6-right.py
▌RIGHT + DEPTH
使用 RIGHT 相机作为输入源,并附加深度信息
...
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
stereo = pipeline.create(dai.node.StereoDepth)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
# 将深度图与 RIGHT 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.RawStereoDepthConfig.AlgorithmControl.DepthAlign.RECTIFIED_RIGHT
)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)imageManip.out.link(spatialDetectionNetwork.input)stereo.rectifiedRight.link(imageManip.inputImage)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-right-spatial.py
▌LEFT
使用 LEFT 相机作为输入源
...
monoLeft = pipeline.create(dai.node.MonoCamera)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
monoLeft.out.link(imageManip.inputImage)
imageManip.out.link(detectionNetwork.input)
...
详见:yolov6-left.py
▌LEFT + DEPTH
使用 LEFT 相机作为输入源,并附加深度信息
...
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
spatialDetectionNetwork = pipeline.create(dai.node.YoloSpatialDetectionNetwork)
stereo = pipeline.create(dai.node.StereoDepth)
imageManip = pipeline.create(dai.node.ImageManip)
...
monoLeft.setBoardSocket(dai.CameraBoardSocket.LEFT)
monoRight.setBoardSocket(dai.CameraBoardSocket.RIGHT)
...
# NN 模型需要 BGR 输入。默认情况下 ImageManip 输出类型与输入相同(在本例中为灰色)
imageManip.initialConfig.setFrameType(dai.ImgFrame.Type.BGR888p)
imageManip.initialConfig.setResize(W, H)
imageManip.setMaxOutputFrameSize(W * H * 3)
...
# 将深度图与 LEFT 相机的视角对齐,在其上进行推理
stereo.setDepthAlign(dai.RawStereoDepthConfig.AlgorithmControl.DepthAlign.RECTIFIED_LEFT
)
stereo.setOutputSize(monoLeft.getResolutionWidth(), monoLeft.getResolutionHeight())
...
monoLeft.out.link(stereo.left)
monoRight.out.link(stereo.right)
imageManip.out.link(spatialDetectionNetwork.input)
stereo.rectifiedLeft.link(imageManip.inputImage)
stereo.depth.link(spatialDetectionNetwork.inputDepth)
...
详见:yolov6-left-spatial.py
▌VIDEO
使用 VIDEO 作为输入源
...
xinFrame = pipeline.create(dai.node.XLinkIn)
detectionNetwork = pipeline.create(dai.node.YoloDetectionNetwork)
...
xinFrame.setStreamName("inFrame")
...
xinFrame.out.link(detectionNetwork.input)
...
# 输入队列将用于将视频帧发送到设备。
inFrameQueue = device.getInputQueue(name="inFrame")
...
img = dai.ImgFrame()
img.setData(to_planar(frame, (W, H)))
img.setTimestamp(monotonic())
img.setWidth(W)
img.setHeight(H)
inFrameQueue.send(img)
...
详见:yolov6-video.py
▌参考资料
https://docs.oakchina.cn/en/latest/
https://www.oakchina.cn/selection-guide/
OAK中国
| OpenCV AI Kit在中国区的官方代理商和技术服务商
| 追踪AI技术和产品新动态
戳「+关注」获取最新资讯↗↗
相关文章:

OAK深度相机使用不同镜头和本地视频流进行模型推理
编辑:OAK中国 首发:oakchina.cn 喜欢的话,请多多👍⭐️✍ 内容可能会不定期更新,官网内容都是最新的,请查看首发地址链接。 ▌前言 Hello,大家好,这里是OAK中国,我是助手…...
[项目] Boost搜索引擎
目录 1.项目相关背景 2.项目宏观原理 3.技术栈和项目环境 4.正排索引&&倒排索引 5.去标签与数据清洗 6.构建索引模块Index 6.1正排索引 6.2 建立倒排 jiebacpp使用 建立分词 7.搜索引擎模块Searcher Jsoncpp -- 通过jsoncpp进行序列化和反序列化 处理Cont…...
解决新版QGIS找不到Georeferencer插件
目录1. 问题分析1.1 去 Raster 找,没找到1.2 去插件搜,未搜到1.3 插件库里也搜不到2. 解决办法在 QGIS 3.30中,按常规办法,找不到 Georeferencer插件,它并没有被安装,在库中也找不到它, 请问问题…...
c---冒泡排序模拟qsort
一、冒泡排序 二、冒泡排序优化排各种类型数据 文章目录一、冒泡排序二、冒泡排序优化排各种类型数据冒泡排序 冒泡排序原理:两两相邻元素进行比较 初级版 void bulle_sort(int* a, int sz) {int i 0;for (int i 0; i < sz-1; i){int j 0; for (j 0; j…...
JS)
Java知识复习(十四)JS
1、数据类型 基本数据类型:null、undefinde、boolean、string、number、symbol(ES6新增)引用数据类型:Function、Array、Object、Map和Set(ES6新增) 2、let、var和const的区别 var定义的变量,…...

代码随想录刷题-数组-移除元素
文章目录写在前面习题我的想法暴力解法双指针写在前面 本节对应代码随想录中:代码随想录 习题 题目链接: 27. 移除元素- 力扣(LeetCode) 给你一个数组 nums 和一个值 val,你需要原地移除所有数值等于 val 的元素&a…...

聚观早报 |拼多多跨境电商业务正式登陆澳洲;中国加快6G网络研发
今日要闻:拼多多跨境电商业务正式登陆澳洲;全球自动驾驶公司排名特斯拉垫底;中国将加快 6G 网络研发;B站再次“崩”上热搜!已闪电修复;微软将必应AI聊天每次对话上限增加至8条拼多多跨境电商业务正式登陆澳…...

MDK Keil5 创建Stm32工程-理论篇(这里以Stm32F103Zet6为例)
一、文件夹创建与文件说明整个工程可以粗略的划分为几个文件夹:BSP底层驱动比如GPIO\Timer等驱动文件CMSIS内核相关的文件Firmware生成的固件下载文件Mycode用户编写的相关文件,主要编写的文件都在这个文件夹里Project工程文件startup芯片启动文件STM32F…...

应届大学生学什么技术好?哪些技术适合年轻人?
到了毕业季,应届大学生面临的就是就业问题,很多专业的大学生难以找到对口的工作,或是不得已随便就业,或者是学个技术高薪就业,那么,问题来了,应届大学生学什么技术好?哪些技术适合年…...
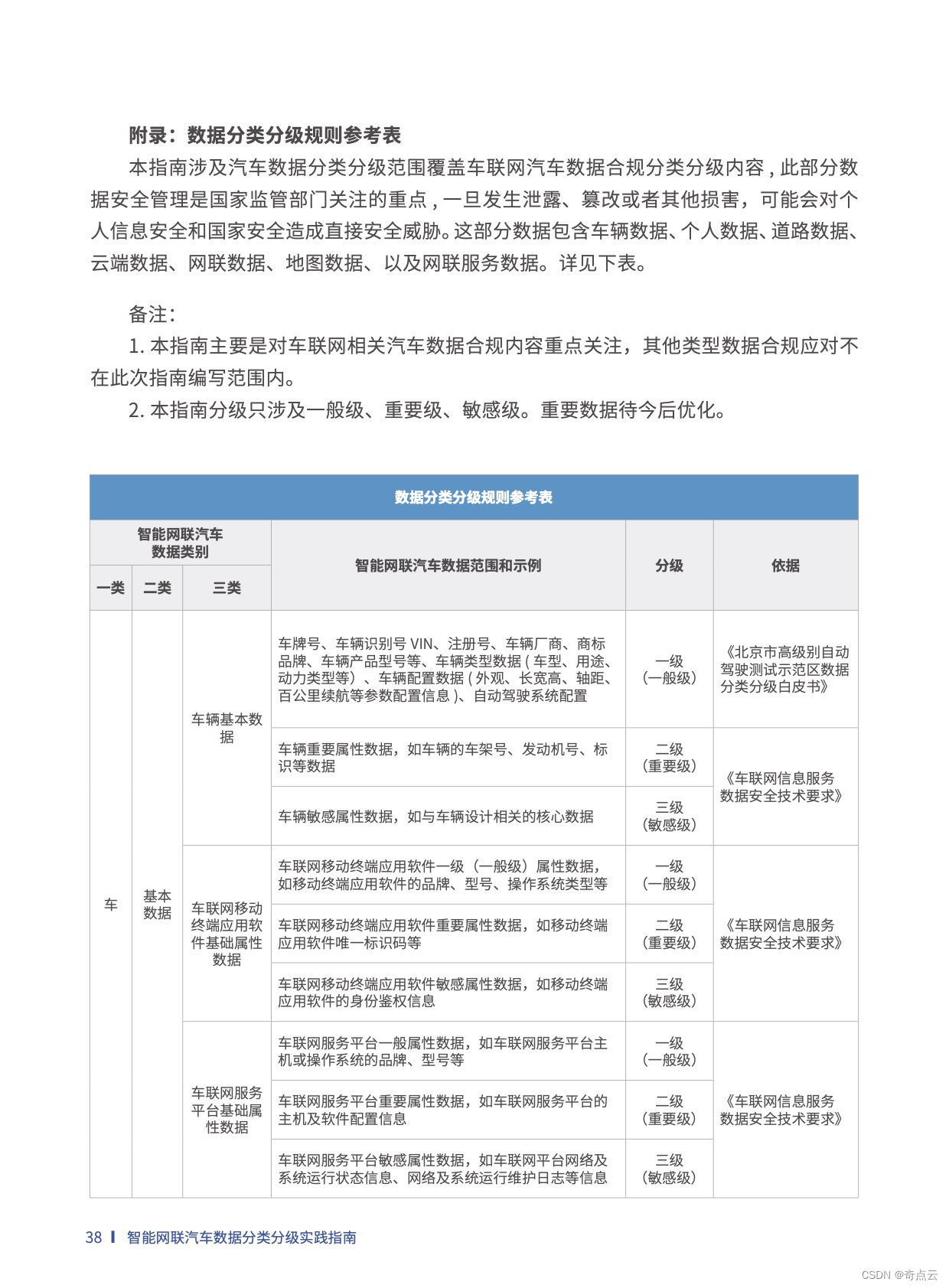
车企数据分类分级的实践指南出炉!“数据安全推进计划”发布,奇点云参编
日前,“数据安全推进计划”(DSI)正式发布《智能网联汽车数据分类分级实践指南》(下文简称“指南”),旨在以合规为主要导向,明确智能网联汽车数据分类分级的方法论,为数据全生命周期的…...
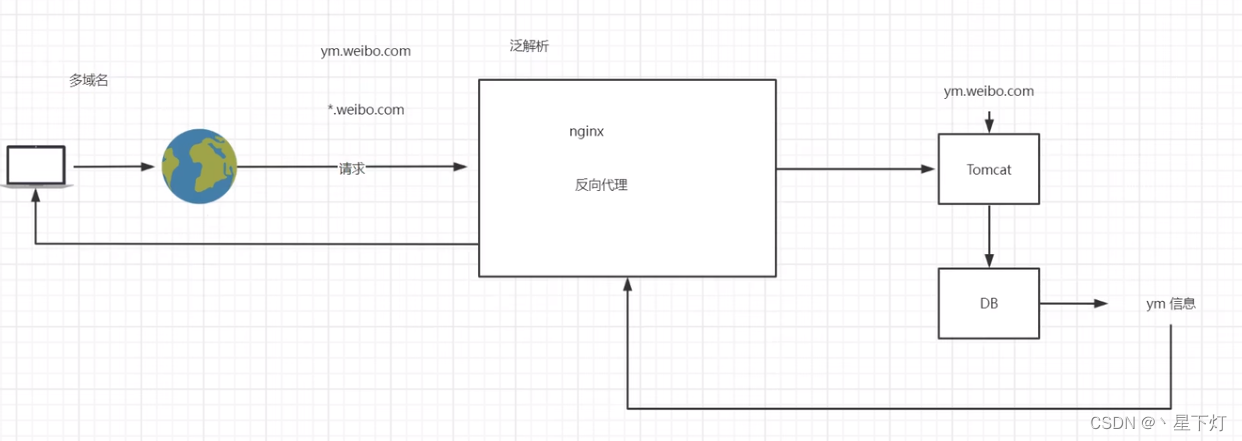
Nginx学习 (2) —— 虚拟主机配置
文章目录虚拟主机原理域名解析与泛域名解析(实践)配置文件中ServerName的匹配规则技术架构多用户二级域名短网址虚拟主机原理 为什么需要虚拟主机: 当一台主机充当服务器给用户提供资源的时候,并不是一直都有很大的用户量&#…...

Java 动态代理简述和实例
Java动态代理是一种在运行时动态创建代理对象的技术。它可以让我们在不修改原始代码的情况下,对原始对象进行增强或者添加额外的行为。这种代理方式可以用于很多场景,例如AOP编程、RPC框架等。动态代理是基于Java反射机制实现的,它允许程序在…...

Unity编译器扩展(Advanced Editor Scripting)
Untiy编译器扩展允许我们对编译器的增加自己编写的的功能菜单栏MenuItemContextMenu和ContextMenuItemContextMenuContextMenuItemMenuItem 该属性允许您将菜单项添加到主菜单和检查器窗口上下文菜单。 该属性将任何静态函数转换为菜单命令。只有静态函数可以使用该属性。 Men…...

AFR机制及流程介绍
AFR(Auto Fast Return)不符合3GPP协议标准,因此终端默认是disable状态。如果运营商有要求可以配置开启。 AFR有两种场景 2G或者3G AFR到4G4G AFR到5G3G AFR TO 4G AFR到LTE功能的作用就是终端从LTE Handover或者重定向到3G进行业务,等业务做完后能够快速回到LTE网络。...

9.Hbase 部署
9.Hbase部署 注意事项: 1:必须事先安装 Hadoop分布式集群,zookeeper分布式集群 2:查看版本号: hbase version1、解压文件并改名 tar -zxvf /opt/software/hbase-2.2.3-bin.tar.gz -C /usr/app/ mv hbase-2.2.3/ hba…...

【maven 学习记录】
maven 学习记录一、maven基础1. maven是什么2. maven的作用3. maven的下载安装4. maven仓库5. maven坐标6. 第一个maven项目 手工实现7. maven插件8. 依赖管理9. 生命周期二、maven进阶一、maven基础 1. maven是什么 maven的本质是一个项目管理工具,将项目开发和管…...

NB-IOT宣传这么多年,这次总算用好了吧
一、方案概述随着实体经济快速发展,石化、港口、货场、工地等区域规模日益扩大,厂区面积广阔、环境复杂、作业人员和车辆众多,如无法实时掌握工作人员状态及外来人员位置、外来车辆情况等问题,将存在非常大的安全隐患。今天小编介…...

sort函数对结构体|pair对组|vector容器|map排序|二维数组的第x列 的排序
目录 sort对 vector容器 sort对 vector<pair<int,int>>对组 sort对 结构体 结构体外部规定排序 结构体内部运算符重载 map容器的排序 map的键排序 map的值排序 sort对二维数组的排序 sort对 vector容器 sort()函数可以用于对vector容器进行排序。具体来…...
Java定时器Timer的使用
一、Timer常用方法 Timer应用场景: 1、每隔一段时间执行指定的代码逻辑(即按周期执行任务) 2、指定时间执行指定的代码逻辑 为方便测试并查看运行效果,首先先建一个类并继承TimerTask,代码如下: package timerTest…...

MySQL安装和配置
下载官网下载mysql解压版本:配置环境变量下载完成后直接解压到需要放的文件夹,根据文件夹来配置环境变量;新建系统变量,变量名自取,值是MySQL的目录编辑path环境变量,加上MySQL的bin目录 %MYSQL_HOME%\bin配…...

从怀疑到信服:VR如何从娱乐玩具进化为现实增强工具
1. 从怀疑到信服:一个技术怀疑论者的VR认知重塑之旅我不是那种会第一时间冲进苹果店排队买最新款手机的人,甚至可以说,我对新科技抱有一种近乎“卢德主义”的警惕。每当有新的技术浪潮涌来,我的第一反应不是兴奋,而是审…...
)
手把手教你用MOS管搭建防反接电路:从原理图到PCB布局的避坑指南(以立创EDA为例)
从零构建MOS管防反接电路:立创EDA实战全流程解析 电源反接是电子设计中最常见的"低级错误"之一,却可能造成毁灭性后果。想象一下:你花费数周完成的智能家居控制器,因为电池装反而瞬间烧毁主控芯片——这种场景在创客社区…...
)
省下PLC的钱!用海康VC3000工控机GPIO控制LED灯(C# WinForm实战)
海康VC3000工控机GPIO控制实战:低成本替代PLC的完整方案 在工业自动化领域,PLC(可编程逻辑控制器)长期以来都是控制系统的核心组件。但对于简单的指示灯控制、报警系统或小型继电器控制这类基础应用,动辄数千元的PLC模…...

地铁站内人员危险情况检测人员跌倒检测数据集VOC+YOLO格式4369张2类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):4369 标注数量(xml文件个数):4369 标注数量(txt文件个数):4369 …...

PHPStudy本地开发,用上Redis 5的Stream和HyperLogLog到底有多香?
PHPStudy本地开发中Redis 5的Stream与HyperLogLog实战指南 Redis作为高性能的内存数据库,在PHP开发中扮演着重要角色。当我们在本地开发环境使用PHPStudy时,默认安装的Redis 3.0.504版本功能有限,无法体验Redis 5引入的强大新特性。本文将深…...

如何为iOS 14.0-16.6.1设备安装TrollStore:TrollInstallerX完整指南
如何为iOS 14.0-16.6.1设备安装TrollStore:TrollInstallerX完整指南 【免费下载链接】TrollInstallerX A TrollStore installer for iOS 14.0 - 16.6.1 项目地址: https://gitcode.com/gh_mirrors/tr/TrollInstallerX 如果你正在寻找一种可靠且简单的方法在i…...

从零到一:深入拆解 I/O 多路复用的前世今生与实战选型
1. 从单线程阻塞到多路复用:I/O模型的进化史 第一次写网络程序时,你可能遇到过这样的场景:服务器在accept()一个客户端连接后,整个程序就像被冻住一样,直到这个客户端发送数据才能继续运行。这就是最原始的阻塞I/O模型…...

深耕落地,精准破局——应用型人工智能专业建设的实践路径
在人工智能产业快速迭代、人才需求持续升级的当下,应用型人工智能专业已成为高校布局新工科、服务区域产业的核心抓手。然而,作为一线专业带头人及授课教师,多数从业者都面临着一个共同的困惑:即便投入大量时间与精力优化培养方案…...

AI智能体自我进化:基于Diff机制的自动化优化实践
1. 项目概述:当AI智能体学会“自我进化”最近在开源社区里,一个名为agentdiff的项目引起了我的注意。它的核心想法非常有趣:让AI智能体(Agent)能够像我们人类一样,通过“反思”和“对比”来学习和进化。简单…...

高压隔离技术:原理、应用与AMC130x设计解析
1. 高压隔离技术的基础原理与行业需求在工业自动化、新能源发电和电力电子系统中,高压隔离技术如同电路系统的"安全气囊",它能在数千伏的电位差下确保信号和能量的无损传输,同时阻断危险电流的流通。德州仪器(TI&#x…...