机器视觉学习(九)—— 边缘检测
目录
一、边缘检测
1.1 Canny边缘检测
1.1.1 cv2.Canny函数
1.1.2 Canny边缘检测示例
1.2 角点检测
1.2.1 cv2.goodFeaturesToTrack()函数
1.2.2 OpenCV角点检测示例代码
1.3 直线检测
1.3.1 cv2.HoughLinesP()函数
1.3.2 OpenCV直线检测示例代码
1.4 圆形检测
1.4.1 cv2.HoughCircles()函数
1.4.2 OpenCV圆形检测示例代码
一、边缘检测
OpenCV中进行边缘检测的一般步骤如下:
1. 导入OpenCV库并读取图像:
import cv2
image = cv2.imread('image.jpg', 0) # 以灰度模式读取图像
在这个步骤中,你需要将图像加载到内存中。你可以选择以灰度模式或彩色模式读取图像。
2. 对图像进行预处理(可选): 根据具体情况,你可以对图像进行平滑处理(如高斯模糊)或增强处理(如直方图均衡化)。这一步骤可以帮助改善边缘检测的结果。
3. 使用边缘检测算法: 在OpenCV中,有多种边缘检测算法可供选择。以下是一些常用的算法:
- Canny边缘检测算法:
edges = cv2.Canny(image, threshold1, threshold2)
threshold1和threshold2是两个阈值,用于控制边缘检测的敏感度。
- Sobel算子:
gradient_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
gradient_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
edges = cv2.sqrt(gradient_x**2 + gradient_y**2)
使用了Sobel算子计算图像的水平和垂直梯度,并将两个梯度的平方和开方得到边缘强度。
4. 显示或保存结果:
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
1.1 Canny边缘检测
Canny边缘检测是一种经典的图像处理算法,也是OpenCV库中常用的边缘检测方法之一。它通过多个步骤来识别图像中的边缘,包括高斯滤波、梯度计算、非最大抑制和双阈值处理。
以下是对Canny边缘检测算法的详细解释:
-
高斯滤波:首先,输入图像会经过一个高斯滤波器,以平滑图像并去除噪声。高斯滤波器是一个线性平滑滤波器,它使用一个二维高斯函数来计算图像中每个像素的新值。
-
梯度计算:在经过高斯滤波之后,算法会计算每个像素的梯度幅值和方向。梯度幅值表示像素的变化强度,而梯度方向表示变化的方向。
-
非最大抑制:接下来,算法会对梯度幅值进行非最大抑制。这个步骤的目的是找出图像中真正的边缘像素,而抑制非边缘的像素。对于每个像素,算法会检查其梯度方向,并与相邻像素进行比较。只有当像素的梯度幅值是该方向上的最大值时,才会被保留为边缘像素,否则会被抑制。
-
双阈值处理:最后,算法会将梯度幅值分成两个阈值:低阈值和高阈值。低阈值用于确定弱边缘像素,而高阈值用于确定强边缘像素。具体而言,如果像素的梯度幅值大于高阈值,则被标记为强边缘像素。如果像素的梯度幅值小于低阈值,则被排除。介于两个阈值之间的像素将被视为弱边缘像素,只有在其周围有强边缘像素时才会被保留。
1.1.1 cv2.Canny函数
cv2.Canny()是OpenCV中用于执行Canny边缘检测的函数。它具有以下语法:
edges = cv2.Canny(image, threshold1, threshold2[, apertureSize[, L2gradient]])
参数说明:
image:输入图像。可以是灰度图像或彩色图像。threshold1:低阈值。边缘强度梯度低于该值的像素被认为不是边缘。threshold2:高阈值。边缘强度梯度高于该值的像素被认为是边缘。apertureSize(可选):Sobel算子的孔径大小。默认值为3。L2gradient(可选):一个布尔值,确定计算梯度的方式。如果为True,则使用L2范数计算梯度(更准确但计算量大);如果为False,则使用L1范数计算梯度(快速但不太准确)。默认值为False。
返回值:
edges:边缘检测结果图像。是一个二值图像,其中白色像素表示边缘,黑色像素表示背景。
注意:
- 通常情况下,推荐将
threshold1设置为threshold2的1/3到1/2的值。 - 较小的阈值会产生更多的边缘,但可能有更多的噪声。
- 较大的阈值会过滤掉较弱的边缘,但可能会丢失一些边缘。
1.1.2 Canny边缘检测示例
下面是OpenCV进行Canny边缘检测的示例代码:
import cv2# 读取图像
image = cv2.imread("image.jpg", cv2.IMREAD_GRAYSCALE)# 执行Canny边缘检测
edges = cv2.Canny(image, 100, 200)# 显示结果
cv2.imshow("Original Image", image)
cv2.imshow("Canny Edges", edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
调用cv2.Canny函数进行Canny边缘检测。设置低阈值为100,高阈值为200。
1.2 角点检测
角点检测是计算机视觉中的一种关键技术,用于检测图像中的角点或特征点。角点是图像中两条边交汇形成的点,通常具有较高的局部变化和不变性。
OpenCV提供了几种角点检测算法,其中两种常用的方法是Harris角点检测和Shi-Tomasi角点检测。
-
Harris角点检测: Harris角点检测算法通过计算图像局部区域的灰度变化,判断是否存在角点。Harris角点检测算法的思想是计算每个像素的响应值,响应值较大的像素被认为是角点。它基于图像的一阶和二阶矩来计算特征值,从而判断每个像素是否为角点。
-
Shi-Tomasi角点检测: Shi-Tomasi角点检测算法是在Harris角点检测算法的基础上进行了改进。Shi-Tomasi角点检测算法使用了每个像素点的最小特征值,即响应最弱的特征值,作为选择角点的准则。这样可以得到比Harris角点检测更好的角点检测结果。
对于这两种角点检测算法,OpenCV提供了相应的函数,可以方便地进行角点检测。通过调整不同的参数,如窗口大小、响应值阈值等,可以得到不同的角点检测结果。
1.2.1 cv2.goodFeaturesToTrack()函数
cv2.goodFeaturesToTrack()是OpenCV中用于角点检测的函数。下面是该函数的详细解释:
corners = cv2.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance, mask=None, blockSize=None, useHarrisDetector=None, k=None)
-
image:输入的灰度图像。 -
maxCorners:要检测的最大角点数量。如果检测到的角点数量超过该值,则会返回最强的角点。 -
qualityLevel:角点质量因子,用于筛选角点。值范围为0到1,表示最好的角点质量。 -
minDistance:两个角点之间的最小欧氏距离。如果两个角点之间的距离小于此值,则其中一个角点将被删除。 -
mask(可选):一个与输入图像大小相同的掩码图像,在掩码区域中不会检测到角点。 -
blockSize(可选):角点检测中使用的像素邻域大小。默认值为3。 -
useHarrisDetector(可选):一个布尔值,表示是否使用Harris角点检测器。默认为False,即使用Shi-Tomasi角点检测器。 -
k(可选):如果使用Harris角点检测器,此参数为Harris检测器的自由参数。默认值为0.04。
函数返回检测到的角点的坐标,以N x 1 x 2的Numpy数组形式返回。在返回的角点数组中,每个角点的坐标可以通过corner[0][0]和corner[0][1]来访问。
注意:
cv2.goodFeaturesToTrack()函数只能用于灰度图像
1.2.2 OpenCV角点检测示例代码
OpenCV进行角点检测的示例代码:
import cv2
import numpy as np# 读取图像
img = cv2.imread("image.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 使用Shi-Tomasi角点检测
corners = cv2.goodFeaturesToTrack(gray, 100, 0.01, 10)
corners = np.int0(corners)# 绘制角点
for corner in corners:x, y = corner.ravel()cv2.circle(img, (x, y), 3, (0, 0, 255), -1)# 显示图像
cv2.imshow("Corners", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先读取图像并将其转换为灰度图像。使用cv2.goodFeaturesToTrack()函数进行角点检测,其中参数gray是输入灰度图像,100是要检测的角点数量,0.01是角点质量因子(0.01 * 最大特征值),10是两个角点之间的最小距离,函数返回的是检测到的角点坐标。
我们使用np.int0()将角点坐标转换为整数类型,并使用cv2.circle()函数绘制出检测到的角点。最后,使用cv2.imshow()显示带有角点的图像,并使用cv2.waitKey()等待键盘输入。
1.3 直线检测
1.3.1 cv2.HoughLinesP()函数
cv2.HoughLinesP()函数是OpenCV中用于通过Hough变换检测图像中的直线的函数。HoughLinesP()函数是Hough变换的参数空间的一种优化,它可以直接检测出图像中的直线的端点。
lines = cv2.HoughLinesP(image, rho, theta, threshold, minLineLength, maxLineGap)参数解释:
- image: 输入的二值图像。
- rho: Hough变换中表示距离精度的参数。
- theta: Hough变换中表示角度精度的参数。
- threshold: Hough变换中表示直线的最小投票数。
- minLineLength: 最小直线长度。
- maxLineGap: 最大直线间隙。
返回值:
- lines: 返回检测到的直线的起点和终点坐标。每个元素代表一条直线,每条直线由端点坐标组成。
1.3.2 OpenCV直线检测示例代码
在OpenCV中,可以使用Hough变换来进行直线检测。以下是使用OpenCV进行直线检测的示例代码:
import cv2
import numpy as np# 加载图像
image = cv2.imread('image.jpg')# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 进行边缘检测
edges = cv2.Canny(gray, 50, 150)# 进行直线检测
lines = cv2.HoughLinesP(edges, 1, np.pi/180, threshold=100, minLineLength=100, maxLineGap=10)# 绘制检测到的直线
if lines is not None:for line in lines:x1, y1, x2, y2 = line[0]cv2.line(image, (x1, y1), (x2, y2), (0, 255, 0), thickness=2)# 显示结果
cv2.imshow("Result", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
1.4 圆形检测
在OpenCV中进行圆形检测,可以使用Hough圆变换。Hough圆变换可以检测图像中的圆形轮廓。
1.4.1 cv2.HoughCircles()函数
使用cv2.HoughCircles()函数可以实现圆形检测。
circles = cv2.HoughCircles(image, method, dp, minDist, param1, param2, minRadius, maxRadius)参数解释:
- image: 输入图像,通常为灰度图像。
- method: Hough圆变换的检测方法,一般使用cv2.HOUGH_GRADIENT。
- dp: 累加器图像分辨率与输入图像分辨率的倒数之比。通常设置为1。
- minDist: 检测到的圆心之间的最小距离。
- param1: 第一个方法特定的参数,对于HOUGH_GRADIENT方法,表示Canny边缘检测的高阈值。
- param2: 第二个方法特定的参数,对于HOUGH_GRADIENT方法,表示检测阶段圆心累加器阈值。
- minRadius: 最小圆形半径。
- maxRadius: 最大圆形半径。
返回值:
- circles: 返回检测到的圆形的圆心坐标和半径。
1.4.2 OpenCV圆形检测示例代码
在OpenCV中,可以使用Hough圆变换来进行直线检测。以下是使用OpenCV进行圆形检测的示例代码:
import cv2
import numpy as npimage = cv2.imread('image.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.medianBlur(gray, 5)circles = cv2.HoughCircles(gray, cv2.HOUGH_GRADIENT, dp=1, minDist=20, param1=50, param2=30, minRadius=0, maxRadius=0)if circles is not None:circles = np.round(circles[0, :]).astype("int")for (x, y, r) in circles:cv2.circle(image, (x, y), r, (0, 255, 0), 4)cv2.imshow('image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上示例代码中,首先读取图像并将其转换为灰度图像。然后对灰度图像进行中值滤波来去除噪声。接下来使用cv2.HoughCircles()函数检测图像中的圆形,并将检测到的圆形绘制在原图像上。最后显示原图像。
相关文章:
—— 边缘检测)
机器视觉学习(九)—— 边缘检测
目录 一、边缘检测 1.1 Canny边缘检测 1.1.1 cv2.Canny函数 1.1.2 Canny边缘检测示例 1.2 角点检测 1.2.1 cv2.goodFeaturesToTrack()函数 1.2.2 OpenCV角点检测示例代码 1.3 直线检测 1.3.1 cv2.HoughLinesP()函数 1.3.2 OpenCV直线检测示例代码 1.4 圆形检测 1.4…...

基于单片机声音分贝采集和显示控制系统设计
**单片机设计介绍,基于单片机声音分贝采集和显示控制系统设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机声音分贝采集和显示控制系统设计,主要目标是实现声音分贝的实时采集、处理以及显示…...
CentOS使用Docker部署Halo并结合内网穿透实现公网访问本地博客
文章目录 1. Docker部署Halo1.1 检查Docker版本如果未安装Docker可参考已安装Docker步骤:1.2 在Docker中部署Halo 2. Linux安装Cpolar2.1 打开服务器防火墙2.2 安装cpolar内网穿透 3. 配置Halo个人博客公网地址4. 固定Halo公网地址 本文主要介绍如何在CentOS 7系统使…...
打造高效自动化渗透测试系统:关键步骤与实践
随着当前网络安全威胁的不断扩展与升级,开展渗透测试工作已经成为广大企业组织主动识别安全漏洞与潜在风险的关键过程。然而,传统的人工渗透测试模式对测试人员的专业能力和经验水平有很高的要求,企业需要投入较大的时间和资源才能完成。在此…...
绿联 部署vocechat,搭建私人聊天服务器,用于小型团队和家庭环境
1、镜像 privoce/vocechat-server:latest 2、安装 2.1、基础设置 重启策略:容器退出时总是重启容器。 2.2、网络 桥接即可。 2.3、存储空间 装载路径:/home/vocechat-server/data不可变更,权限读写。 2.4、端口设置 容器端口3000不可变…...

考研数学|高效刷透汤家凤《1800》经验分享
当然不需要换老师,如果你在基础阶段连汤老师的课都听不进去,那么换其他老师的话,很大可能也是白搭。 如果你现在对于1800还是一筹莫展的话,那么很明显,这反映出前期基础不扎实,没有真正理解和掌握这部分内…...

LLM推理入门指南②:深入解析KV缓存
在本系列文章《LLM推理入门指南①:文本生成的初始化与解码阶段》中,作者对Transformer解码器的文本生成算法进行了高层次概述,着重介绍了两个阶段:单步初始化阶段,即提示的处理阶段,和逐个生成补全词元的多…...
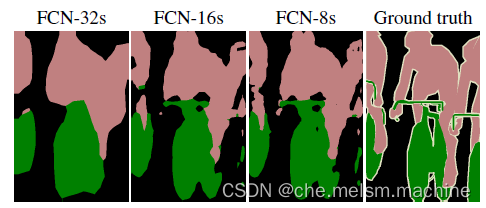
上采样技术在语义分割中的应用
目录 概要 一、概述 二、实现方法 1.转置卷积 2.反池化 3.双线性插值法 三、在经典网络中的的应用 1.U-Net 2.FCN 总结 概要 上采样是用于深度学习中提高语义分割精度的技术,可以实现图像放大和像素级别标注 一、概述 神经网络的基本结构为:…...

linux 组建raid5详细操作
raid5最多运行损坏一个盘,最少3个盘,容量为少一块硬盘的容量之和。 如果硬盘数量较多,比如8块以上,建议用raid6,raid6最多允许两块硬盘损坏。 如果需要 一、安装raid软件 deb包 apt-get install mdadm或dnf包 dnf …...

机器学习概念、步骤、分类和实践
在当今数字化时代,机器学习已经渗透到我们生活的方方面面,从智能手机应用、搜索引擎优化,到自动驾驶汽车、医疗诊断等,其应用无处不在。本文将带您走进机器学习的世界,了解它的基本概念、步骤、分类以及实践应用。 一…...
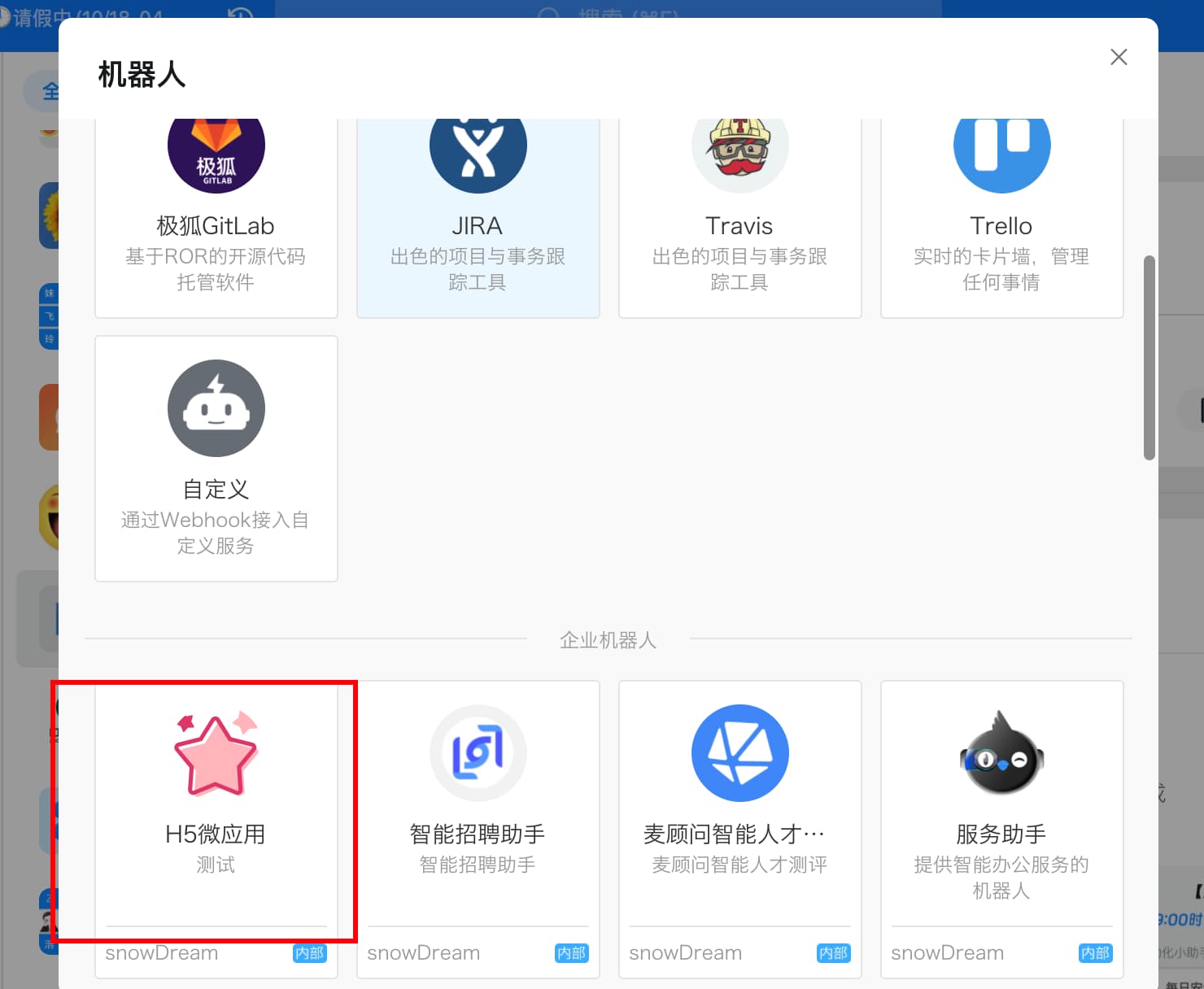
钉钉服务端API报错 错误描述: robot 不存在;解决方案:请确认 robotCode 是否正确
problem 调用钉钉服务端API,机器人发送群聊消息,后台返回报错信息: 钉钉服务端API报错 错误描述: robot 不存在;解决方案:请确认 robotCode 是否正确; reason 定位: 登录后台,查看机器人是存在查看机器人调用权限接…...

Linux 开发环境以及编译链接
再谈编译链接 C函数重载与编译链接-CSDN博客 之前我已经写过文章简单介绍了编译链接要做的一些操作。现在为了能更好的理解我们平时的开发环境,我会在Linux系统上完整地走一遍流程。 环境描述 我们使用普通用户在Linux上进行操作,先写一段测试代码。 …...

SmartChart的部署以及可能遇见的报错解决方案
简介 数据可视化是一种将数据转化为图形的技术,可以帮助人们更好地理解和分析数据。但是,传统的数据可视化开发往往需要编写大量的代码,或者使用复杂的拖拽工具,不仅耗时耗力,而且难以实现个性化的需求。有没有一种更…...

【Node.js从基础到高级运用】十九、Node.js 捕获错误之“未捕获的异常”
引言 在 Node.js 应用程序中,错误处理是保证应用稳定性和可靠性的关键部分。特别是“未捕获的异常”(uncaught exceptions),如果不妥善处理,很可能会导致整个进程崩溃。在本文中,我们将探讨如何在 Node.js …...

vue 计算属性
基础示例 模板中的表达式虽然方便,但也只能用来做简单的操作。如果在模板中写太多逻辑,会让模板变得臃肿,难以维护。比如说,我们有这样一个包含嵌套数组的对象: const author reactive({name: John Doe,books: [V…...

RedissonLock-tryLock-续期
redisson版本3.16.6 1.什么是看门狗 Redisson提供的分布式锁是支持锁自动续期的,也就是说,如果线程仍旧没有执行完,那么redisson会自动给redis中的目标key延长超时时间,这在Redisson中称之为 Watch Dog 机制。默认情况下&#x…...

MSTP环路避免实验(华为)
思科设备参考:MSTP环路避免实验(思科) 一,技术简介 MSTP(多生成树协议),MSTP解决了STP和RSTP没有考虑vlan的问题,STP和RSTP将所有的vlan共享为一个生成树实例,无法实现…...
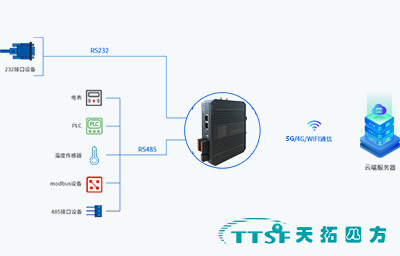
IoT网关在智能制造工厂生产线监控与管理中的应用-天拓四方
随着工业4.0时代的到来,智能制造已成为工业发展的重要方向。IoT网关在智能制造工厂中扮演着关键角色,它能够实现设备间的互联互通、数据的实时采集与处理,以及生产线的智能监控与管理。本案例将详细介绍IoT网关在智能制造工厂生产线监控与管理…...

niushop单商户V5多店版源码分享三端uniapp打包方法包括PC端_小程序或h5端打包_收银端打包_APP端打包_商户端
目前多店版有四端uniapp,包括PC端uniapp,商家端uniapp,收银端uniapp,门店手机端uniapp,下面我总结下这些端的打包流程希望能帮助到大家,需要交流的可以看我昵称或者点我头像关注我分享代码和教程 一.niush…...

npm包发布
一、npm npm(Node Package Manager)是 Node.js 的包管理工具,用于安装、分享和管理 JavaScript 包和项目依赖。npm 是 Node.js 的默认包管理器,随同 Node.js 一起安装。 二、npm主要功能特点 包管理:npm 允许开发者…...

DISMTools企业部署:在组织中大规模应用的最佳实践
DISMTools企业部署:在组织中大规模应用的最佳实践 【免费下载链接】DISMTools The connected place for Windows system administration 项目地址: https://gitcode.com/GitHub_Trending/di/DISMTools DISMTools是一款专为Windows系统管理设计的连接平台&…...

BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行
BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

Office RibbonX Editor:让Office界面定制变得像搭积木一样简单
Office RibbonX Editor:让Office界面定制变得像搭积木一样简单 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbon…...

DeepSeek基准测试避坑手册:92%开发者忽略的4大陷阱——硬件配置偏差、tokenizer不一致、batch size幻觉、温度值污染
更多请点击: https://codechina.net 第一章:DeepSeek基准测试避坑手册:92%开发者忽略的4大陷阱——硬件配置偏差、tokenizer不一致、batch size幻觉、温度值污染 硬件配置偏差:GPU显存与计算精度的隐性干扰 在A100(8…...

别只拿PotPlayer看片了!挖掘它的采集录制功能,做Switch游戏存档大师
别把PotPlayer当普通播放器!解锁它的Switch游戏录制黑科技 你是否已经厌倦了在OBS、Bandicam等专业录制软件中反复调试参数的繁琐?是否想过那个每天用来看视频的PotPlayer,其实隐藏着令人惊喜的游戏录制能力?今天,我们…...

FairyGUI Unity鼠标悬停与点击对象获取原理与实战
1. 这不是“加个OnMouseEnter就能用”的事:FairyGUI在Unity中处理鼠标交互的真实困境很多人第一次在Unity里集成FairyGUI,想实现“鼠标悬停显示提示”或“点击高亮当前按钮”,下意识就去翻Unity的MonoBehaviour文档,找OnMouseEnte…...

OmenSuperHub:基于WMI BIOS控制的高性能笔记本硬件管理方案
OmenSuperHub:基于WMI BIOS控制的高性能笔记本硬件管理方案 【免费下载链接】OmenSuperHub Control Omen laptop performance, fan speeds, and keyboard lighting, and unlock power limits. 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 在惠…...

java项目011-ssm 宠物医院系统
java项目011-ssm 宠物医院系统 是一款基于springspringmvcmybatis的宠物系统, 包含界面布局、医生信息管理、客户信息管理、宠物管理、浏览管理、 诊断管理、医生管理、用户管理 其中医生管理、用户管理只能管理员有权限进行操作。 采用spingboot方式启动 运行截图...

render_async嵌套渲染:构建复杂异步界面的完整解决方案
render_async嵌套渲染:构建复杂异步界面的完整解决方案 【免费下载链接】render_async render_async lets you include pages asynchronously with AJAX 项目地址: https://gitcode.com/gh_mirrors/re/render_async 在现代Web开发中,页面加载速度…...

Python-for-Android 完整指南:5分钟将Python应用打包为Android APK
Python-for-Android 完整指南:5分钟将Python应用打包为Android APK 【免费下载链接】python-for-android Turn your Python application into an Android APK 项目地址: https://gitcode.com/gh_mirrors/py/python-for-android Python-for-Android࿰…...