【opencv】教程代码 —features2D(8)AKAZE 特征点匹配和图像拼接

graf1.png

graf3.png
<?xml version="1.0"?>
<opencv_storage>
<H13 type_id="opencv-matrix"><rows>3</rows><cols>3</cols><dt>d</dt><data>7.6285898e-01 -2.9922929e-01 2.2567123e+023.3443473e-01 1.0143901e+00 -7.6999973e+013.4663091e-04 -1.4364524e-05 1.0000000e+00 </data></H13>
</opencv_storage>H1to3p.xml
AKAZE_match.cpp 特征点匹配和图像拼接
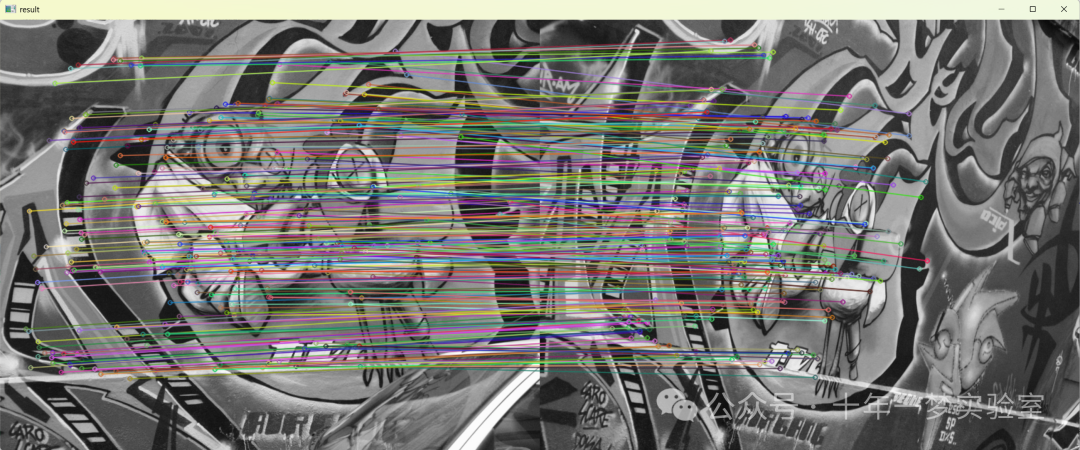
此代码为功能强大的特征点匹配和图像拼接程序,主要使用OPENCV库的AKAZE算法。流程如下:
读取两张图片及齐次图矩阵。
利用AKAZE算法提取图像的特征点和描述子。
使用Brute-Force匹配器,对两组描述子执行近邻搜索,找出最佳匹配对。
进行比率测试来剔除不良匹配。
利用齐次图矩阵验证匹配点,筛选出内点。
我们对之前通过比例测试找到的匹配点对进行进一步的同质性检查,通过计算变换后的点与原始匹配点之间的欧氏距离来评估匹配质量。如果点对对应的变换后的距离小于设定的内点阈值,这对点匹配就被认定为好的匹配,并分别添加到内点向量
inliers1、inliers2和良好匹配向量good_matches中。最终,good_matches中包含了所有通过同质性检查的内点匹配对,可以用于后续绘制匹配结果或其他处理。绘制和保存匹配点的结果图片。
打印关于匹配的统计信息,并显示结果。
整个代码实现的是对两张图片进行特征点匹配,并通过一定的筛选条件去除错误的匹配点,最后绘制出内点并计算内点比例。
#include <opencv2/features2d.hpp> // 引入OpenCV特征检测相关头文件
#include <opencv2/imgproc.hpp> // 引入OpenCV图像处理相关头文件
#include <opencv2/highgui.hpp> // 引入OpenCV高级GUI(图形用户界面)相关头文件
#include <iostream> // 引入输入输出流头文件using namespace std; // 使用标准命名空间
using namespace cv; // 使用OpenCV命名空间const float inlier_threshold = 2.5f; // 设置内点距离阈值,用于同质性检查识别内点
const float nn_match_ratio = 0.8f; // 设置最近邻匹配比例int main(int argc, char* argv[])
{//! [load]// 解析命令行参数CommandLineParser parser(argc, argv,"{@img1 | graf1.png | input image 1}""{@img2 | graf3.png | input image 2}""{@homography | H1to3p.xml | homography matrix}");// 读取图片1,以灰度模式Mat img1 = imread( samples::findFile( parser.get<String>("@img1") ), IMREAD_GRAYSCALE);// 读取图片2,以灰度模式Mat img2 = imread( samples::findFile( parser.get<String>("@img2") ), IMREAD_GRAYSCALE);// 读取同质性矩阵Mat homography;FileStorage fs( samples::findFile( parser.get<String>("@homography") ), FileStorage::READ);fs.getFirstTopLevelNode() >> homography;//! [load]//! [AKAZE]// 初始化特征点向量和描述符矩阵vector<KeyPoint> kpts1, kpts2;Mat desc1, desc2;// 创建AKAZE特征检测器Ptr<AKAZE> akaze = AKAZE::create();// 对img1进行特征检测和描述符计算akaze->detectAndCompute(img1, noArray(), kpts1, desc1);// 对img2进行特征检测和描述符计算akaze->detectAndCompute(img2, noArray(), kpts2, desc2);//! [AKAZE]//! [2-nn matching]// 创建BFMatcher,用于特征匹配BFMatcher matcher(NORM_HAMMING);vector< vector<DMatch> > nn_matches;// 执行2近邻匹配matcher.knnMatch(desc1, desc2, nn_matches, 2);//! [2-nn matching]//! [ratio test filtering]// 初始化过滤后的匹配特征点向量vector<KeyPoint> matched1, matched2;// 过滤不符合比例测试的匹配for(size_t i = 0; i < nn_matches.size(); i++) {DMatch first = nn_matches[i][0];float dist1 = nn_matches[i][0].distance;float dist2 = nn_matches[i][1].distance;// 如果第一个距离小于第二个距离乘以设定的比例,则认为是好的匹配if(dist1 < nn_match_ratio * dist2) {matched1.push_back(kpts1[first.queryIdx]);matched2.push_back(kpts2[first.trainIdx]);}}//! [ratio test filtering]//! [homography check]vector<DMatch> good_matches; // 初始化一个DMatch向量,用于存储良好匹配对vector<KeyPoint> inliers1, inliers2; // 初始化两个KeyPoint向量,用于存储一致性检查后的内点匹配// 遍历所有已匹配的特征点对for(size_t i = 0; i < matched1.size(); i++) {Mat col = Mat::ones(3, 1, CV_64F); // 创建一个三行一列的矩阵,初始化为1,用于齐次坐标表示col.at<double>(0) = matched1[i].pt.x; // 设置矩阵的第一个元素为当前匹配对的第一个点的x坐标col.at<double>(1) = matched1[i].pt.y; // 设置矩阵的第二个元素为当前匹配对的第一个点的y坐标col = homography * col; // 通过同质性矩阵变换第一个点的坐标col /= col.at<double>(2); // 使变换后的坐标成为非齐次坐标// 计算两个匹配点之间的欧氏距离double dist = sqrt( pow(col.at<double>(0) - matched2[i].pt.x, 2) +pow(col.at<double>(1) - matched2[i].pt.y, 2));// 如果距离小于内点阈值,则认为这个匹配是好的内点匹配if(dist < inlier_threshold) {int new_i = static_cast<int>(inliers1.size()); // 计算当前内点的索引inliers1.push_back(matched1[i]); // 将第一个点添加到内点集中inliers2.push_back(matched2[i]); // 将第二个点添加到内点集中good_matches.push_back(DMatch(new_i, new_i, 0)); // 将这对内点添加到良好匹配向量中}}//! [homography check]//! [draw final matches]// 初始化结果图像Mat res;// 绘制好的匹配点对drawMatches(img1, inliers1, img2, inliers2, good_matches, res);// 保存结果图像imwrite("akaze_result.png", res);// 计算内点比率double inlier_ratio = inliers1.size() / (double) matched1.size();// 输出统计结果cout << "A-KAZE Matching Results" << endl;cout << "*******************************" << endl;cout << "# Keypoints 1: \t" << kpts1.size() << endl;cout << "# Keypoints 2: \t" << kpts2.size() << endl;cout << "# Matches: \t" << matched1.size() << endl;cout << "# Inliers: \t" << inliers1.size() << endl;cout << "# Inliers Ratio: \t" << inlier_ratio << endl;cout << endl;// 显示结果图像imshow("result", res);// 等待用户响应waitKey();//! [draw final matches]return 0;
}终端输出:
A-KAZE Matching Results
*******************************
# Keypoints 1: 2418
# Keypoints 2: 2884
# Matches: 382
# Inliers: 267
# Inliers Ratio: 0.698953相关文章:
【opencv】教程代码 —features2D(8)AKAZE 特征点匹配和图像拼接
graf1.png graf3.png <?xml version"1.0"?> <opencv_storage> <H13 type_id"opencv-matrix"><rows>3</rows><cols>3</cols><dt>d</dt><data>7.6285898e-01 -2.9922929e-01 2.2567123e02…...

ssm基于springboot的数字家庭亲子视频分享网站java+vue
本网站的模块主要分为前台展示模块和后台管理模块。 前台展示模块功能如下: 1)家庭照片模块 主要功能是对家庭照片的分类显示,如旅游、运动、生活、工作、学习等,每一类中的照片按时间轴展示出来。 2)家庭亲子视频模块…...
之自我管理)
产品经理功法修炼(1)之自我管理
点击下载《产品经理功法修炼(1)之自我管理》 1. 前言 产品经理的能力修炼并非局限于某一技能的速成,而是需要全面参与到产品的整个生命周期中,通过不断的实践来逐步提升自己的各项能力。尽管在企业的日常运作中,我们不可能身兼数职去扮演每一个角色,但作为产品的核心负…...
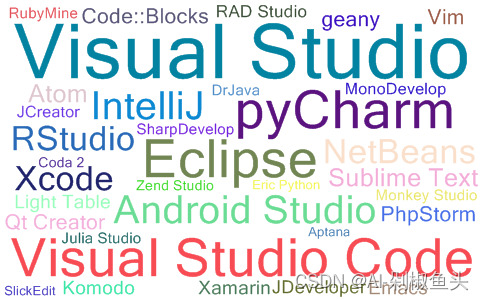
2024年04月IDE流行度最新排名
点击查看最新IDE流行度最新排名(每月更新) 2024年04月IDE流行度最新排名 顶级IDE排名是通过分析在谷歌上搜索IDE下载页面的频率而创建的 一个IDE被搜索的次数越多,这个IDE就被认为越受欢迎。原始数据来自谷歌Trends 如果您相信集体智慧&am…...
17.应用负载压力测试
早些点,下午题考,最近几年出现的少; 备考较为简单;历年真题相似度高; 主要议题: 1.负载压力测试概述 注意这些测试细微的差别; 负载测试和压力测试的方法比较相似,但是目的不同&a…...

Gauss到底是不是国产数据库
华为GaussDB数据库深度解析 引言 在数字化转型的浪潮中,数据成为企业最宝贵的资产之一。如何高效地管理和利用这些数据,成为企业面临的一大挑战。数据库作为数据存储和管理的核心系统,其性能、安全性、可用性和扩展性等特性直接影响到企业的…...
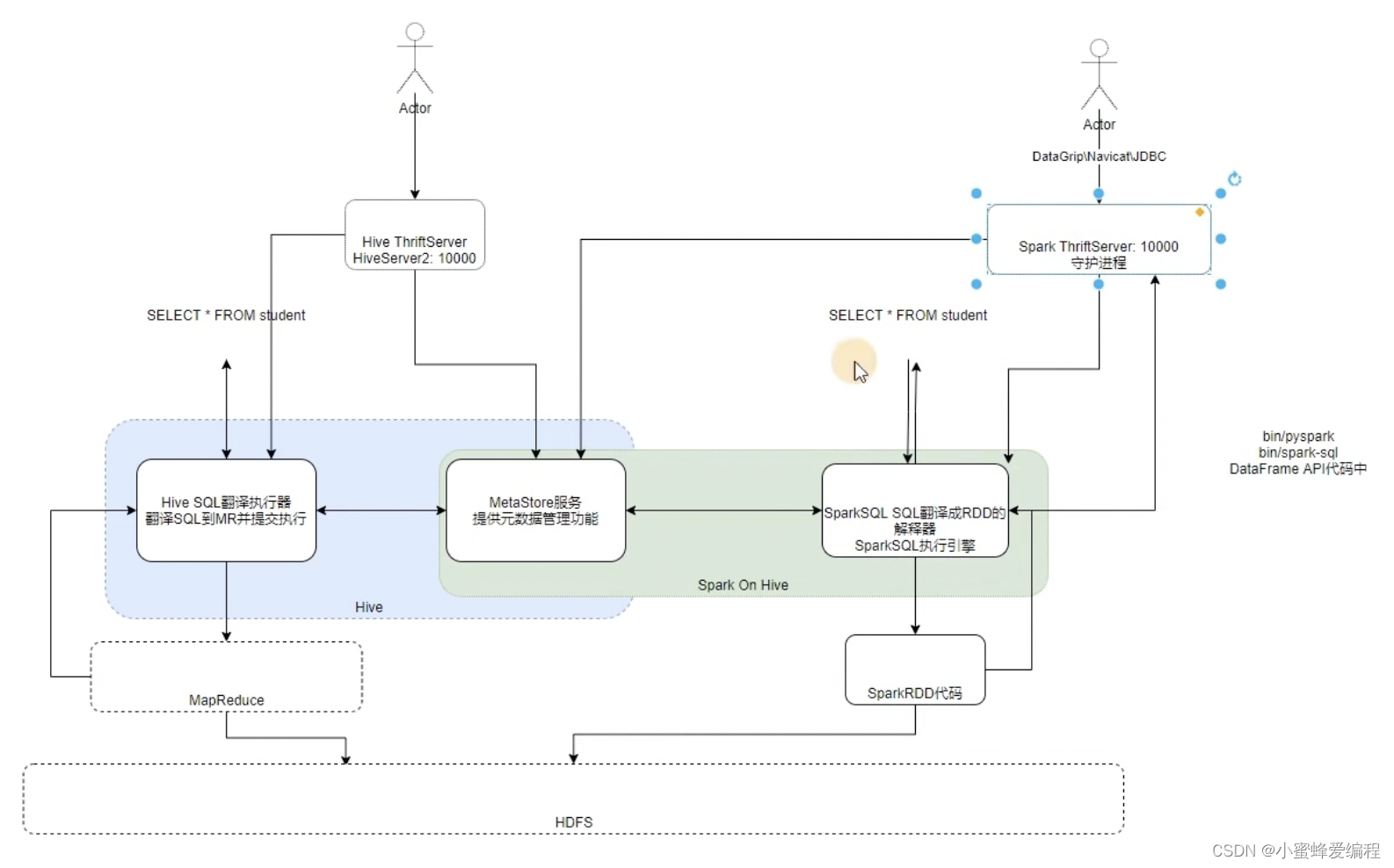
spark sql执行引擎原理及配置
如果我们想要给上层开发人员配置好一个统一的sql开发界面,让他们统一通过sql开发即可,可通过spark中的thriftserver服务实现,与hive中的thriftserver类似,配置好该服务后,上层通过db client或者代码中通过jdbc连接即可…...
【C语言基础】:自定义类型(二) -->联合和枚举
文章目录 一、联合体1.1 联合体类型的声明1.2 联合体的特点1.3 相同成员的结构体和联合体对比1.4 联合体大小的计算1.5 联合体练习 二、枚举类型2.1 枚举类型的声明2.2 枚举的优点 书山有路勤为径,学海无涯苦作舟。 创作不易,宝子们!如果这篇…...

【授时防火墙】GPS北斗卫星授时信号安全防护装置系统
【授时防火墙】GPS北斗卫星授时信号安全防护装置系统 【授时防火墙】GPS北斗卫星授时信号安全防护装置系统 1、装置概述 卫星信号安全防护装置(以下简称“防护装置”)是一款专门针对卫星导航授时安全的设备。该设备能接收 BD 系统和 GPS 系统卫星信号&am…...
)
关于 MySQL 优化(详解)
文章目录 关于 MySQL 优化一、硬件方面的优化1、关于 CPU2、关于内存3、关于磁盘 二、MySQL 配置文件1、 default-time-zone8:002、interactive_timeout 1203、wait_timeout 1204、open_files_limit 102405、group_concat_max_len 1024006、usermysql7、character-set-serv…...

Hive详解(5)
Hive 窗口函数 案例 需求:连续三天登陆的用户数据 步骤: -- 建表 create table logins (username string,log_date string ) row format delimited fields terminated by ; -- 加载数据 load data local inpath /opt/hive_data/login into table log…...

阿里云效codeup如何执行github flow工作流
在阿里云效中执行 GitHub 工作流,实质上是在使用 Git 进行版本控制的过程中遵循 GitHub Flow 的原则。GitHub Flow 是一种简洁高效的工作流程,特别适用于追求快速迭代的团队。下面是在阿里云效中执行 GitHub 工作流的基本步骤: 1. 准备工作 …...

node.js的模块化 与 CommonJS规范
一、node.js的模块化 (1)什么是模块化? 将一个复杂的程序文件依据一定的规则拆分成为多个文件的过程就是模块化 在node.js中,模块化是指把一个大文件拆分成独立并且相互依赖的多个小模块,将每个js文件被认为单独的一个模块;模块…...
)
RK3588平台开发系列讲解(PWM开发篇)
目录 前⾔ 驱动文件 DTS 节点配置 PWM 流程 PWM 使⽤ 常⻅问题 PWM 在 U-Boot 与 kernel 之间的衔接问题 PWM Regulator 时 PWM pin 脚上下拉配置问题 前⾔ 脉宽调制( PWM , Pulse Width Modulation )功能在嵌⼊式系统中是⾮常常⻅的…...

宝塔面板操作一个服务器域名部署多个网站
此处记录IP一样,端口不一样的操作方式: 宝塔面板操作: 1、创建第一个网站: 网站名用IP地址,默认80端口。 创建好后,直接IP访问就可以了。看到自带的默认首页 2、接下来部署第二个网站: 仍然是…...

surfer绘制等值线图
surfer介绍 Surfer软件,是美国Golden Software公司编制的一款以画三维图的软件。该软件具有强大的插值功能和绘制图件能力,可用来处理XYZ数据,是地质工作者常用的专业成图软件(来源于百度百科)。 surfer可以用来绘制…...

免费开源的 AI 绘图工具 ImgPilot
免费开源的 AI 绘图工具 ImgPilot 分类 开源分享 项目名: ImgPilot -- 通过提示词及涂鸦生成图片 Github 开源地址: GitHub - leptonai/imgpilot: Turn the draft into amazing artwork with the power of Real-Time Latent Consistency Model 在线地址ÿ…...

Java系统架构设计:构建稳定高效的软件基石
在当今数字化时代,软件系统的稳定性、可扩展性和性能至关重要。Java作为一种广泛应用的编程语言,其系统架构设计对于软件的成功实施具有决定性的影响。本文将探讨Java系统架构设计的重要性以及设计过程中的关键要素。 首先,Java系统架构设计…...

【IntermLM2】学习笔记
微调方式 在大模型的下游应用中,可以有两种微调方式 增量续训 即无监督的方式,让模型学习一些新知识,比如某些垂直领域的新知识 使用的数据有:书籍,文章,代码等有监督微调 为了让模型学会理解指令进行对话…...
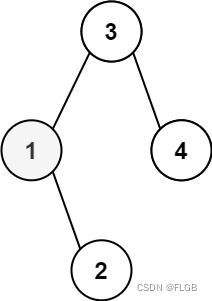
【二叉树】Leetcode 230. 二叉搜索树中第K小的元素【中等】
二叉搜索树中第K小的元素 给定一个二叉搜索树的根节点 root ,和一个整数 k ,请你设计一个算法查找其中第 k 个最小元素(从 1 开始计数)。 示例1: 输入:root [3,1,4,null,2], k 1 输出:1 解…...

SmartNIC如何优化AI流水线与网络计算卸载
1. SmartNIC与AI流水线的联姻:网络计算卸载的技术革命 在分布式AI推理场景中,我们常常遇到一个令人头疼的现象:当GPU计算单元满载运行时,CPU利用率也常常飙升至90%以上。这种资源争用并非来自模型推理本身,而是源于那些…...

Faust.js实战:用Next.js构建高性能Headless WordPress前端
1. 项目概述:当WordPress遇见现代前端如果你和我一样,在过去几年里深度参与过企业级WordPress项目,那你一定对那个经典的“两难困境”记忆犹新:一方面,WordPress的后台管理体验和内容生态无可匹敌,是内容团…...

Git Conflict Resolution
1. 这篇文章解决什么问题? Git 冲突不是异常情况,而是多人协作和分支开发里的正常现象。 常见问题包括: 1. 为什么会产生冲突? 2. 冲突文件里的 <<<<<<<、、>>>>>>> 是什么?…...

移动网络安全盲区:Windows PC成恶意软件主要源头与防御策略
1. 一个被忽视的真相:移动网络中的“隐形杀手”如果你和我一样,长期关注网络安全,尤其是移动安全领域,那你可能已经习惯了各种关于安卓恶意软件激增、iOS漏洞被利用的警报。媒体头条也总是被“史上最危险手机病毒”这样的标题占据…...

如何将Claude Code的配置无缝迁移至Taotoken平台以解决封号困扰
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何将Claude Code的配置无缝迁移至Taotoken平台以解决封号困扰 Claude Code 作为一款高效的编程助手,其核心能力依赖于…...

微软创新者窘境:从J的离开看大公司如何留住颠覆性人才
1. 从“J”的离去看微软的“创新者窘境”2010年5月,当微软宣布其娱乐与设备事业部(E&D)的重组,以及J Allard和Robbie Bach两位核心人物的离开时,科技圈的反应是复杂的。表面上看,这是一次常规的高层人事…...
:Claude在长文档法律分析胜出32%,Gemini在实时多跳检索快4.8倍——你的业务该选谁?)
大模型选型生死局(企业CTO私藏对比清单):Claude在长文档法律分析胜出32%,Gemini在实时多跳检索快4.8倍——你的业务该选谁?
更多请点击: https://intelliparadigm.com 第一章:大模型选型生死局:Claude vs Gemini核心能力全景图 在企业级AI应用落地的关键阶段,模型选型已远非单纯比拼参数量或基准分数,而是对推理鲁棒性、上下文工程适配度、多…...

告别TwinCAT:手把手教你用LinuxCNC+IGH搭建开源EtherCAT运动控制平台
告别商业软件束缚:LinuxCNCIGH开源运动控制平台实战指南 在工业自动化和运动控制领域,商业软件长期占据主导地位,但高昂的授权费用和封闭的生态系统让许多工程师和创客望而却步。开源运动控制平台的出现打破了这一局面,为追求灵活…...

氛围编程实战:用AI工具栈快速构建可部署应用
1. 项目概述:什么是“氛围编程”?如果你对“氛围编程”这个词感到陌生,或者觉得它听起来有点玄乎,那太正常了。我第一次听到时,也以为又是哪个硅谷弄潮儿发明的新潮黑话。但当我真正开始实践,并在几个月内从…...

基于WebSocket的Web即时通讯后端架构设计与实战部署指南
1. 项目概述:一个面向开发者的Web即时通讯解决方案最近在折腾一个内部协作工具,需要集成一个稳定、可控且能深度定制的即时通讯模块。市面上成熟的IM SDK很多,但要么是黑盒,出了问题排查困难;要么是功能臃肿࿰…...