基于PSO优化的CNN-LSTM-Attention的时间序列回归预测matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
4.1卷积神经网络(CNN)在时间序列中的应用
4.2 长短时记忆网络(LSTM)处理序列依赖关系
4.3 注意力机制(Attention)
5.算法完整程序工程
1.算法运行效果图预览
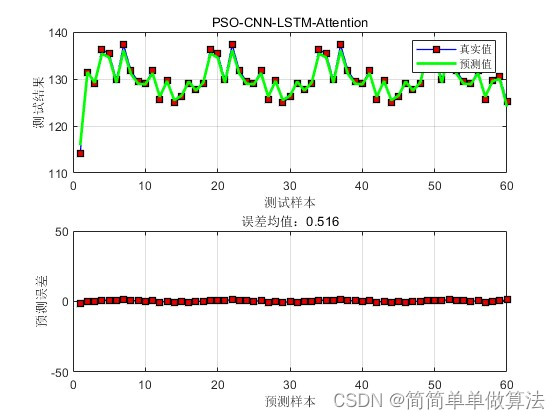
PSO优化前:
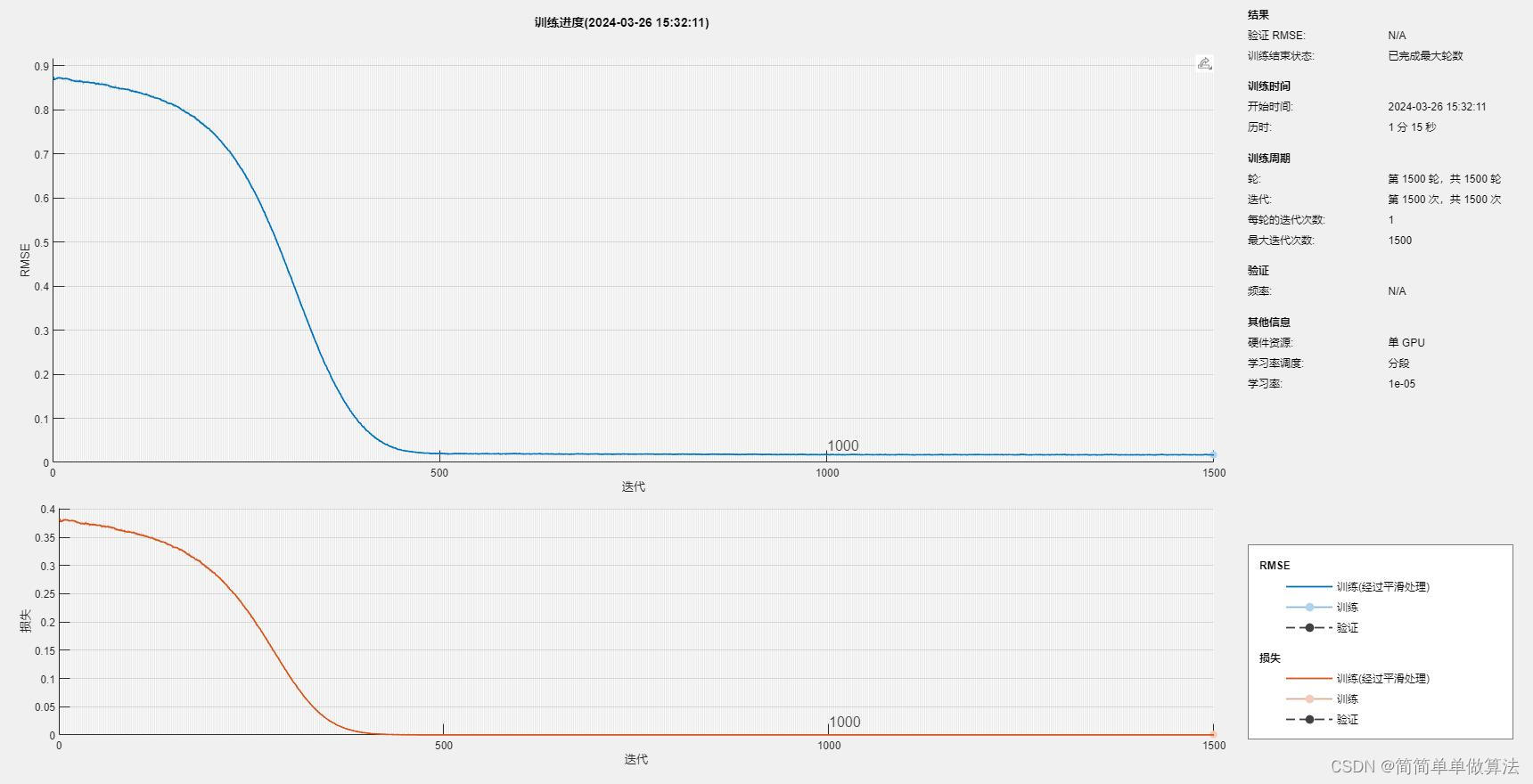

PSO优化后:

2.算法运行软件版本
MATLAB2022A
3.部分核心程序
........................................................................
for i=1:Iterifor j=1:Npeoprng(i+j)if func_obj(x1(j,:))<pbest1(j)p1(j,:) = x1(j,:);%变量pbest1(j) = func_obj(x1(j,:));endif pbest1(j)<gbest1g1 = p1(j,:);%变量gbest1 = pbest1(j);endv1(j,:) = 0.8*v1(j,:)+c1*rand*(p1(j,:)-x1(j,:))+c2*rand*(g1-x1(j,:));x1(j,:) = x1(j,:)+v1(j,:); for k=1:dimsif x1(j,k) >= tmps(2,k)x1(j,k) = tmps(2,k);endif x1(j,k) <= tmps(1,k)x1(j,k) = tmps(1,k);endendfor k=1:dimsif v1(j,k) >= tmps(2,k)/2v1(j,k) = tmps(2,k)/2;endif v1(j,k) <= tmps(1,k)/2v1(j,k) = tmps(1,k)/2;endendendgb1(i)=gbest1
endfigure;
plot(gb1,'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);xlabel('优化迭代次数');
ylabel('适应度值');numHiddenUnits = floor(g1(1))+1
LR = g1(2)layers = func_model2(Dim,numHiddenUnits);
%设置
%迭代次数
%学习率为0.001
options = trainingOptions('adam', ... 'MaxEpochs', 1500, ... 'InitialLearnRate', LR, ... 'LearnRateSchedule', 'piecewise', ... 'LearnRateDropFactor', 0.1, ... 'LearnRateDropPeriod', 1000, ... 'Shuffle', 'every-epoch', ... 'Plots', 'training-progress', ... 'Verbose', false);%训练
Net = trainNetwork(Nsp_train2, NTsp_train, layers, options);%数据预测
Dpre1 = predict(Net, Nsp_train2);
Dpre2 = predict(Net, Nsp_test2);%归一化还原
T_sim1=Dpre1*Vmax2;
T_sim2=Dpre2*Vmax2;%网络结构
analyzeNetwork(Net)figure
subplot(211);
plot(1: Num1, Tat_train,'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(1: Num1, T_sim1,'g',...'LineWidth',2,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);legend('真实值', '预测值')
xlabel('预测样本')
ylabel('预测结果')
grid onsubplot(212);
plot(1: Num1, Tat_train-T_sim1','-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);xlabel('预测样本')
ylabel('预测误差')
grid on
ylim([-50,50]);figure
subplot(211);
plot(1: Num2, Tat_test,'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(1: Num2, T_sim2,'g',...'LineWidth',2,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
legend('真实值', '预测值')
xlabel('测试样本')
ylabel('测试结果')
grid onsubplot(212);
plot(1: Num2, Tat_test-T_sim2','-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);xlabel('预测样本')
ylabel('预测误差')
grid on
ylim([-50,50]);save R2.mat Num2 Tat_test T_sim2 gb1
121
4.算法理论概述
时间序列回归预测是数据分析的重要领域,旨在根据历史数据预测未来时刻的数值。近年来,深度学习模型如卷积神经网络(Convolutional Neural Network, CNN)、长短时记忆网络(Long Short-Term Memory, LSTM)以及注意力机制(Attention Mechanism)在时间序列预测中展现出显著优势。然而,模型参数的有效设置对预测性能至关重要。粒子群优化(PSO)作为一种高效的全局优化算法,被引入用于优化深度学习模型的超参数。
粒子群优化(PSO)是一种基于群体智能的全局优化算法。每个粒子代表一个可能的解决方案(即模型超参数组合),通过迭代更新粒子的速度和位置,寻找最优解。对于超参数优化问题,粒子位置Pi表示模型超参数,速度Vi表示超参数调整方向和幅度。
4.1卷积神经网络(CNN)在时间序列中的应用
在时间序列数据中,CNN用于提取局部特征和模式。对于一个长度为T的时间序列数据X = [x_1, x_2, ..., x_T],通过卷积层可以生成一组特征映射:

CNN通过多个卷积层和池化层的堆叠来提取输入数据的特征。每个卷积层都包含多个卷积核,用于捕捉不同的特征。池化层则用于降低数据的维度,减少计算量并增强模型的鲁棒性。
4.2 长短时记忆网络(LSTM)处理序列依赖关系
LSTM单元能够有效捕捉时间序列中的长期依赖关系。在一个时间步t,LSTM的内部状态h_t和隐藏状态c_t更新如下:
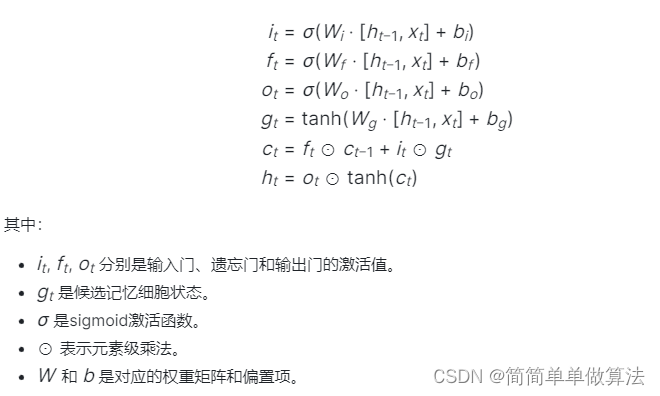
长短时记忆网络是一种特殊的循环神经网络(RNN),设计用于解决长序列依赖问题。在时间序列预测中,LSTM能够有效地捕捉时间序列中的长期依赖关系。
4.3 注意力机制(Attention)
注意力机制是一种让模型能够自动地关注输入数据中重要部分的技术。在时间序列预测中,注意力机制可以帮助模型关注与当前预测最相关的历史信息。
CNN-LSTM-Attention模型结合了CNN、LSTM和Attention三种技术的优势。首先,使用CNN提取时间序列中的局部特征;然后,将提取的特征输入到LSTM中,捕捉时间序列中的长期依赖关系;最后,通过注意力机制对LSTM的输出进行加权,使模型能够关注与当前预测最相关的历史信息。具体来说,模型的流程如下: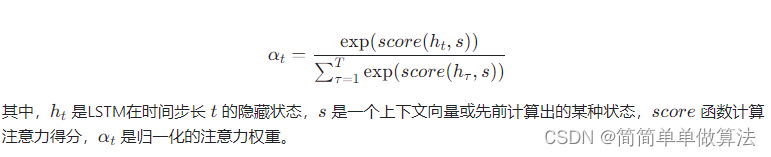
5.算法完整程序工程
OOOOO
OOO
O
相关文章:
基于PSO优化的CNN-LSTM-Attention的时间序列回归预测matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1卷积神经网络(CNN)在时间序列中的应用 4.2 长短时记忆网络(LSTM)处理序列依赖关系 4.3 注意力机制(Attention) 5…...

物联网监控可视化是什么?部署物联网监控可视化大屏有什么作用?
随着物联网技术的深入应用,物联网监控可视化成为了企业数字化转型的关键环节。物联网监控可视化大屏作为物联网监控平台的重要组成部分,能够实时展示物联网设备的运行状态和数据,为企业管理决策和运维监控提供了有力的支持。今天,…...

设计一个Rust线程安全栈结构 Stack<T>
在Rust中,设计一个线程安全的栈结构Stack<T>,类似于Channel<T>,但使用栈的FILO(First-In-Last-Out)原则来在线程间传送数据,可以通过使用标准库中的同步原语如Mutex和Condvar来实现。下面是一个…...
Docker Desktop 在 Windows 上的安装和使用
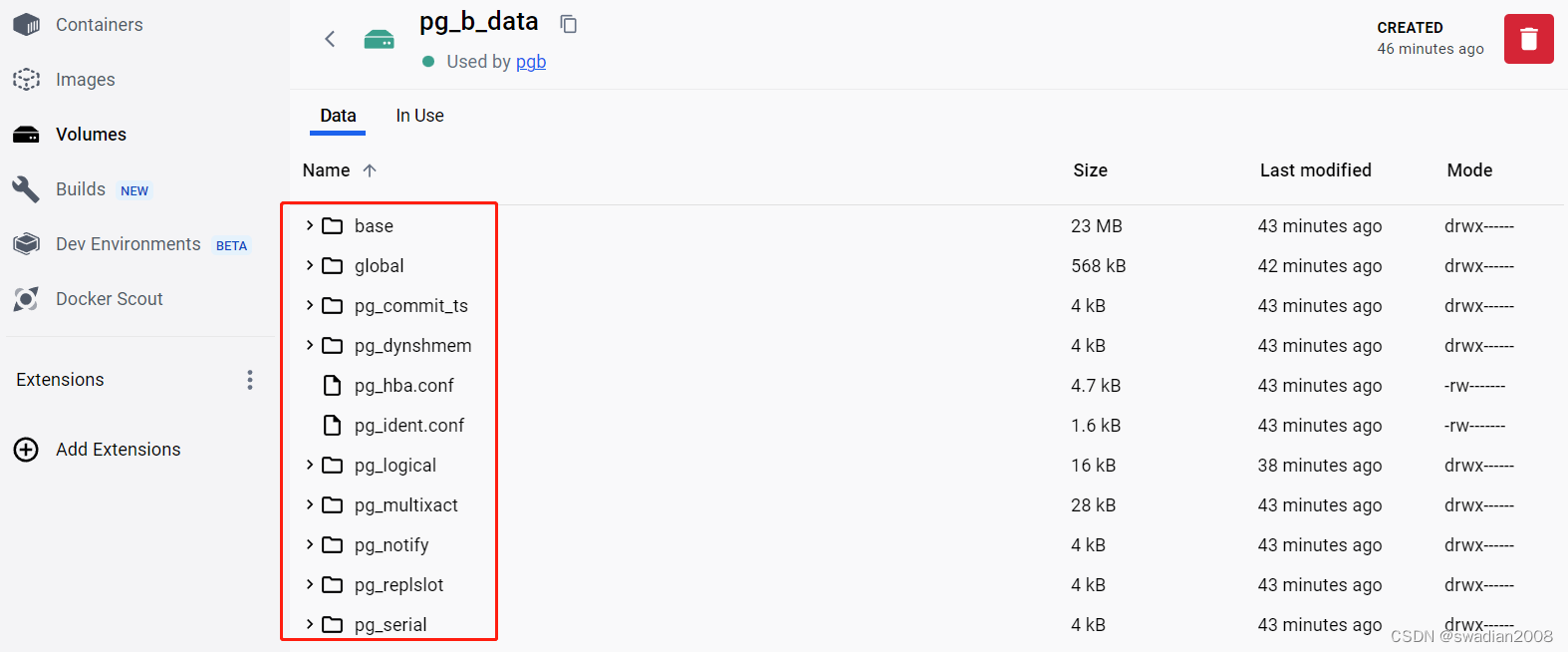
目录 1、安装 Docker Desktop 2、使用 Docker Desktop (1)运行容器 (2)查看容器信息 (3)数据挂载 Docker Desktop是Docker的官方桌面版,专为Mac和Windows用户设计,提供了一个简…...

2024年最受欢迎的 19 个 VS Code 主题排行榜
博主猫头虎的技术世界 🌟 欢迎来到猫头虎的博客 — 探索技术的无限可能! 专栏链接: 🔗 精选专栏: 《面试题大全》 — 面试准备的宝典!《IDEA开发秘籍》 — 提升你的IDEA技能!《100天精通鸿蒙》 …...
))
突破编程_C++_网络编程(OSI 七层模型(物理层与数据链路层))
1 OSI 七层模型概述 OSI(Open Systems Interconnection)七层模型,即开放系统互联参考模型,起源于 20 世纪 70 年代和 80 年代。随着计算机网络技术的快速发展和普及,不同厂商生产的计算机和网络设备之间的互操作性成为…...

Spring boot如何使用redis缓存
引入依赖 这个是参照若依的,如果没有统一的版本规定的话,这里是需要写版本号的 <!-- redis 缓存操作 --> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-redis</arti…...

红蓝色WordPress外贸建站模板
红蓝色WordPress外贸建站模板 https://www.mymoban.com/wordpress/5.html...

python爬虫----了解爬虫(十一天)
🎈🎈作者主页: 喔的嘛呀🎈🎈 🎈🎈所属专栏:python爬虫学习🎈🎈 ✨✨谢谢大家捧场,祝屏幕前的小伙伴们每天都有好运相伴左右,一定要天天…...

碳素光线疗法与宠物健康
碳素光线与宠物健康 生息在地球上的所有动物、在自然太阳光奇妙的作用下、生长发育。太阳光的能量使它们不断进化、繁衍种族。现在、生物能够生存、全仰仗于太阳的光线。太阳光线中、包含有动物健康所需要的极为重要的波长。因此、和户外饲养的动物相比、在室内喂养的观赏动物、…...

展锐平台camera添加底层水印
展锐平台camera添加水印,从底层用编码覆盖图像数组,保证上层获取图像水印的一致性 时间水印diff --git a/vendor/sprd/modules/libcamera/hal3_2v6/SprdCamera3HWI.cpp b/vendor/sprd/modules/libcamera/hal3_2v6/SprdCamera3HWI.cpp index f2b704f9d6..…...
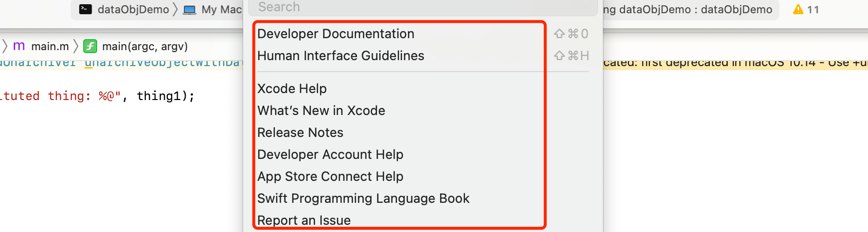
OSX-02-Mac OS应用开发系列课程大纲和章节内容设计
本节笔者会详细介绍下本系统专题的大纲,以及每个专题章节的组织结构。这样读者会有一个全局的概念。 在开始前还是在再介绍一下下面这个框架图,因为比较重要,在这里再冗余介绍一下。开发Apple公司相关产品的软件时,主要有两个框架…...
热门IT【视频教程】-华为/思科/红帽/oracle
华为认证 网络工程师-入门基础课:华为HCIA认证课程介绍-CSDN博客 网络工程师进阶课:华为HCIP认证课程介绍-CSDN博客 职场进阶,踏上高峰——HCIE-Datacom认证-CSDN博客 华为HCIA试听课程 : 超级实用,华为VRP系统文件…...

HCTNet:一种用于乳腺超声图像分割的混合CNN-transformer
HCTNet:一种用于乳腺超声图像分割的混合CNN-transformer 摘要引言相关工作方法 Materials and methods分割方法 HCTNet_ A hybrid CNN-transformer network for breast ultrasound image segmentation 摘要 乳腺超声图像的自动分割有助于提高乳腺癌诊断的准确性。近…...

766. 托普利茨矩阵
给你一个 m x n 的矩阵 matrix 。如果这个矩阵是托普利茨矩阵,返回 true ;否则,返回 false 。 如果矩阵上每一条由左上到右下的对角线上的元素都相同,那么这个矩阵是 托普利茨矩阵 。 示例 1: 输入:matr…...

基于STM32的汽车防窒息系统
文章目录 基于STM32的汽车防窒息系统系统简介材料展示视频制作硬件连接原理图PCB实物图GSM模块使用GSM模块代码 SGP30模块SGP30模块代码 步进电机驱动步进电机代码 其他模块主逻辑代码 总结 基于STM32的汽车防窒息系统 系统简介 随着社会的发展目前汽车的流行,汽车大…...
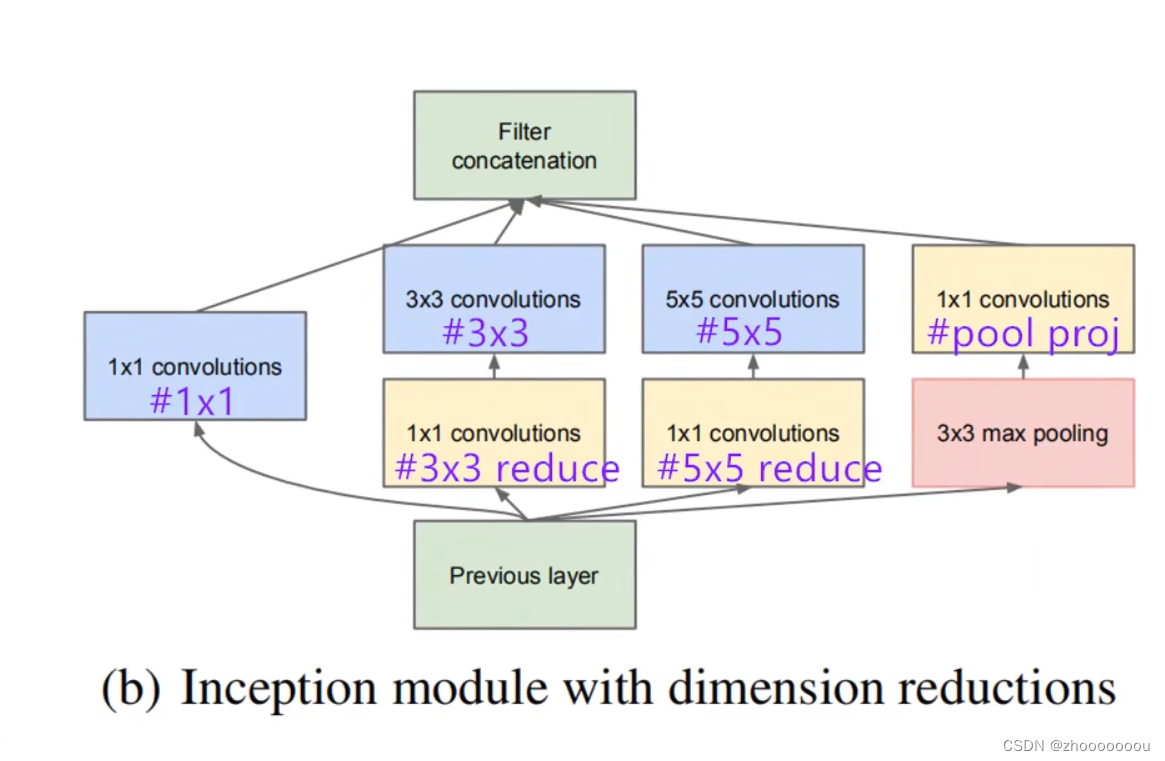
GoogleNet神经网络介绍
一、简介 GoogleNet,也称为GoogLeNet,是谷歌工程师设计的一种深度神经网络结构,它在2014年的ImageNet图像识别挑战赛中取得了冠军。该神经网络的设计特点主要体现在其深度和宽度上,通过引入名为Inception的核心子网络结构&#x…...

AI水下颜色校正解决方案,助力企业打造水下视觉盛宴
水下摄影作为一种独特且富有挑战性的拍摄方式,正受到越来越多旅行者和摄影师的青睐。然而由于海水的光线折射和金属成分的影响,水下拍摄的照片和视频往往存在严重的偏色问题,无法真实还原水下世界的美丽与神奇。美摄科技凭借深厚的技术积累和…...
LINUX笔记温习
目录 DAY1 DAY2 day3: day4 day5 day6 day7 day8 day9 day10 day11 day12 day13 day14 day15 20day DAY1 1、多层级文件夹创建要带-p; 2、创建多文件,要先到该目录下才能创建(第一个目录必须存在才能有效建立); D…...

钉钉服务端API报错 43008 参数需要multipart类型
钉钉服务端API报错 43008 参数需要multipart类型 problem 使用媒体文件上传接口,按照文档输入参数,结果返回报错 # 参数 {"access_token": "xxx""type": "image","media": "/Users/xxx/xxx/s…...

终极指南:轻松突破Cursor Pro限制,实现永久免费使用
终极指南:轻松突破Cursor Pro限制,实现永久免费使用 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached…...

终极指南:在Windows上免模拟器安装安卓应用的创新方案
终极指南:在Windows上免模拟器安装安卓应用的创新方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer APK Installer 是一款专为Windows系统设计的安卓应用…...

2026年最值得投入的5款AI Agent工具:Gartner认证+生产环境压测数据全公开
更多请点击: https://intelliparadigm.com 第一章:2026年最佳AI Agent工具推荐 2026年,AI Agent 已从概念原型迈入企业级生产部署阶段。开发者不再满足于单任务自动化,而是追求具备长期记忆、跨平台协调与自主目标分解能力的智能…...

Apple Mail自动化增强:JXA脚本与快捷指令提升邮件处理效率
1. 项目概述:一个为Apple Mail打造的现代化邮件客户端如果你和我一样,日常工作高度依赖邮件,并且是macOS生态的深度用户,那么Apple Mail(邮件.app)大概率是你的主力工具。它简洁、与系统深度集成、iCloud同…...

芯片人才危机破局:D.E.I.B.战略如何驱动创新与商业成功
1. 芯片行业人才危机的深度剖析与D.E.I.B.的战略价值 最近和几位在芯片设计公司和晶圆厂负责招聘的老友聊天,大家不约而同地提到了同一个词:“焦头烂额”。不是项目进度卡脖子,而是人根本招不到。一位在模拟芯片公司做HR总监的朋友告诉我&…...
:运算符)
初识java(三):运算符
目录 一:什么是运算符 二:算术运算符 1. 基本四则运算符:加减乘除模( - * / %) 2.增量运算符 - * % 3. ⾃增/⾃减运算符 -- 三:关系运算符 四:逻辑运算符(重点) 1.逻辑与&& 2.逻辑 || …...

Verilog与SystemVerilog在Arm Cycle Model Compiler中的支持与优化
1. Verilog与SystemVerilog语言支持概述 作为数字电路设计的行业标准语言,Verilog和SystemVerilog在半导体领域占据着核心地位。Arm的Cycle Model Compiler 11.5版本对这两种语言提供了全面的支持,但在实际工程应用中,开发者需要特别注意不同…...

从嵌入式系统会议看技术生态构建:硬件开发与软件工程的融合实践
1. 从一场成功的会议到下一年的蓝图:嵌入式系统会议的幕后与启示刚结束的芝加哥嵌入式系统大会(ESC Chicago)被主办方评价为“一次巨大的成功”。作为一名在硬件开发与软件领域摸爬滚打了十几年的工程师,我深知这类行业顶级会议的…...

零基础避坑指南什么工具可以录音转待办
还在手动把面试录音扒成文字再摘待办?做HR的谁没踩过这个坑:整理一小时,漏了候选人关键信息,还把待办记错,今天直接讲能直接上手的方法,零基础也不会踩坑。我做HR那几年,光整理录音待办就熬了无…...

当AI开始写代码,测试工程师的挑战才刚刚开始
最近,我让五款主流的AI编程工具完成了同一个开发需求,结果让我这个做了八年测试的老兵深受震撼。不是为了比较谁写的代码更“优雅”,而是从测试的角度,我看到了未来五年软件质量保障工作的全新图景。 我们测试从业者正站在一个十…...