A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用
A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用
- 1 CAN通用驱动程序所有函数预览
- 1.1 HAL_CAN_Init
- 1.2 HAL_CAN_ConfigFilter
- 1.3 HAL_CAN_DeInit
- 1.4 HAL_CAN_MspInit
- 1.5 HAL_CAN_MspDeInit
- 1.6 HAL_CAN_Transmit
- 1.7 HAL_CAN_Transmit_IT
- 1.8 HAL_CAN_Receive
- 1.9 HAL_CAN_Receive_IT
- 1.10 HAL_CAN_Sleep
- 1.11 HAL_CAN_WakeUp
- 1.12 HAL_CAN_IRQHandler
- 1.13 HAL_CAN_TxCpltCallback
- 1.14 HAL_CAN_RxCpltCallback
- 1.15 HAL_CAN_ErrorCallback
- 1.16 HAL_CAN_GetState
- 1.17 HAL_CAN_GetError
- 该文档修改记录:
- 总结
1 CAN通用驱动程序所有函数预览
| 序号 | 函数名 | 描述 |
|---|---|---|
| 1 | HAL_CAN_Init() | 初始化CAN外设。 |
| 2 | HAL_CAN_ConfigFilter() | 配置CAN过滤器。 |
| 3 | HAL_CAN_DeInit() | 反初始化CAN外设。 |
| 4 | HAL_CAN_MspInit() | 初始化MCU外设相关的CAN引脚或资源。 |
| 5 | HAL_CAN_MspDeInit() | 反初始化MCU外设相关的CAN引脚或资源。 |
| 6 | HAL_CAN_Transmit() | 同步发送CAN消息。 |
| 7 | HAL_CAN_Transmit_IT() | 异步发送CAN消息,使用中断处理发送完成。 |
| 8 | HAL_CAN_Receive() | 同步接收CAN消息。 |
| 9 | HAL_CAN_Receive_IT() | 异步接收CAN消息,使用中断处理接收完成。 |
| 10 | HAL_CAN_Sleep() | 进入CAN休眠模式。 |
| 11 | HAL_CAN_WakeUp() | 唤醒CAN设备。 |
| 12 | HAL_CAN_IRQHandler() | CAN中断处理程序。 |
| 13 | HAL_CAN_TxCpltCallback() | CAN发送完成回调函数。 |
| 14 | HAL_CAN_RxCpltCallback() | CAN接收完成回调函数。 |
| 15 | HAL_CAN_ErrorCallback() | CAN错误回调函数。 |
| 16 | HAL_CAN_GetState() | 获取CAN状态。 |
| 17 | HAL_CAN_GetError() | 获取CAN错误状态。 |
使用模板:
#include "stm32f4xx_hal.h"int main(void) {// HAL初始化HAL_Init();// 初始化MCU外设相关的引脚或资源HAL_MspInit();// 初始化CAN外设HAL_CAN_Init();// 配置CAN过滤器HAL_CAN_ConfigFilter();// 启动CAN设备// 进行其他操作...// 发送CAN消息HAL_CAN_Transmit();// 异步发送CAN消息HAL_CAN_Transmit_IT();// 接收CAN消息HAL_CAN_Receive();// 异步接收CAN消息HAL_CAN_Receive_IT();// 进入CAN休眠模式HAL_CAN_Sleep();// 唤醒CAN设备HAL_CAN_WakeUp();// 获取CAN状态uint32_t canState = HAL_CAN_GetState();// 获取CAN错误状态uint32_t canError = HAL_CAN_GetError();// 反初始化CAN外设HAL_CAN_DeInit();// 反初始化MCU外设相关的引脚或资源HAL_MspDeInit();return 0;
}
1.1 HAL_CAN_Init
| 函数名 | HAL_CAN_Init |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Init(CAN_HandleTypeDef* hcan) |
| 功能描述 | 初始化 CAN 控制器 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:初始化结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.2 HAL_CAN_ConfigFilter
| 函数名 | HAL_CAN_ConfigFilter |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_ConfigFilter(CAN_HandleTypeDef* hcan, CAN_FilterTypeDef* sFilter) |
| 功能描述 | 配置 CAN 过滤器 |
| 输入参数 1 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输入参数 2 | sFilter:CAN 过滤器配置结构体,包含过滤器编号、模式、掩码等信息 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:配置结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.3 HAL_CAN_DeInit
| 函数名 | HAL_CAN_DeInit |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_DeInit(CAN_HandleTypeDef* hcan) |
| 功能描述 | 反初始化 CAN 控制器 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:反初始化结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.4 HAL_CAN_MspInit
| 函数名 | HAL_CAN_MspInit |
|---|---|
| 函数原形 | void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan) |
| 功能描述 | CAN 外设底层初始化,典型的用途是配置外设的时钟和引脚 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.5 HAL_CAN_MspDeInit
| 函数名 | HAL_CAN_MspDeInit |
|---|---|
| 函数原形 | void HAL_CAN_MspDeInit(CAN_HandleTypeDef* hcan) |
| 功能描述 | CAN 外设底层反初始化,典型的用途是恢复外设的默认配置 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.6 HAL_CAN_Transmit
| 函数名 | HAL_CAN_Transmit |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Transmit(CAN_HandleTypeDef* hcan, uint32_t Timeout) |
| 功能描述 | 启动 CAN 数据传输 |
| 输入参数 1 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输入参数 2 | Timeout:传输超时时间,单位为毫秒 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:传输结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.7 HAL_CAN_Transmit_IT
| 函数名 | HAL_CAN_Transmit_IT |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Transmit_IT(CAN_HandleTypeDef* hcan) |
| 功能描述 | 以中断方式启动 CAN 数据传输 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:传输结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.8 HAL_CAN_Receive
| 函数名 | HAL_CAN_Receive |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Receive(CAN_HandleTypeDef* hcan, uint8_t FIFONumber, uint32_t Timeout) |
| 功能描述 | 接收 CAN 数据 |
| 输入参数 1 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输入参数 2 | FIFONumber:FIFO 编号,可以是 CAN_FIFO0 或 CAN_FIFO1 |
| 输入参数 3 | Timeout:接收超时时间,单位为毫秒 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:接收结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.9 HAL_CAN_Receive_IT
| 函数名 | HAL_CAN_Receive_IT |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Receive_IT(CAN_HandleTypeDef* hcan, uint8_t FIFONumber) |
| 功能描述 | 以中断方式启动 CAN 数据接收 |
| 输入参数 1 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输入参数 2 | FIFONumber:FIFO 编号,可以是 CAN_FIFO0 或 CAN_FIFO1 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:接收结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.10 HAL_CAN_Sleep
| 函数名 | HAL_CAN_Sleep |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_Sleep(CAN_HandleTypeDef* hcan) |
| 功能描述 | 进入 CAN 休眠模式 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:操作结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.11 HAL_CAN_WakeUp
| 函数名 | HAL_CAN_WakeUp |
|---|---|
| 函数原形 | HAL_StatusTypeDef HAL_CAN_WakeUp(CAN_HandleTypeDef* hcan) |
| 功能描述 | 唤醒 CAN 控制器 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | HAL_StatusTypeDef:操作结果,可以是 HAL_OK 或 HAL_ERROR |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.12 HAL_CAN_IRQHandler
| 函数名 | HAL_CAN_IRQHandler |
|---|---|
| 函数原形 | void HAL_CAN_IRQHandler(CAN_HandleTypeDef* hcan) |
| 功能描述 | CAN 中断处理函数 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.13 HAL_CAN_TxCpltCallback
| 函数名 | HAL_CAN_TxCpltCallback |
|---|---|
| 函数原形 | void HAL_CAN_TxCpltCallback(CAN_HandleTypeDef* hcan) |
| 功能描述 | CAN 数据传输完成回调函数 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.14 HAL_CAN_RxCpltCallback
| 函数名 | HAL_CAN_RxCpltCallback |
|---|---|
| 函数原形 | void HAL_CAN_RxCpltCallback(CAN_HandleTypeDef* hcan) |
| 功能描述 | CAN 数据接收完成回调函数 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.15 HAL_CAN_ErrorCallback
| 函数名 | HAL_CAN_ErrorCallback |
|---|---|
| 函数原形 | void HAL_CAN_ErrorCallback(CAN_HandleTypeDef *hcan) |
| 功能描述 | CAN 错误处理回调函数 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.16 HAL_CAN_GetState
| 函数名 | HAL_CAN_GetState |
|---|---|
| 函数原形 | uint32_t HAL_CAN_GetState(CAN_HandleTypeDef* hcan) |
| 功能描述 | 获取 CAN 控制器状态 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | uint32_t:CAN 控制器状态,可能的值有: |
- HAL_CAN_STATE_READY:就绪状态- HAL_CAN_STATE_BUSY:忙碌状态- HAL_CAN_STATE_BUSY_TX:忙碌发送状态- HAL_CAN_STATE_BUSY_RX:忙碌接收状态- HAL_CAN_STATE_BUSY_TX_RX:忙碌发送接收状态- HAL_CAN_STATE_TIMEOUT:超时状态- HAL_CAN_STATE_ERROR:错误状态 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
1.17 HAL_CAN_GetError
| 函数名 | HAL_CAN_GetError |
|---|---|
| 函数原形 | uint32_t HAL_CAN_GetError(CAN_HandleTypeDef* hcan) |
| 功能描述 | 获取 CAN 错误状态 |
| 输入参数 | hcan:CAN 句柄,指向一个 CAN_HandleTypeDef 结构体 |
| 输出参数 | 无 |
| 返回值 | uint32_t:CAN 错误状态,可能的值有: |
- HAL_CAN_ERROR_NONE:无错误- HAL_CAN_ERROR_EWG:错误警告- HAL_CAN_ERROR_EPV:误差传动器警告- HAL_CAN_ERROR_BOF:总线关闭错误- HAL_CAN_ERROR_LEC:最后的错误代码- HAL_CAN_ERROR_SOF:起始帧错误- HAL_CAN_ERROR_ACK:确认错误- HAL_CAN_ERROR_BR:位错误- HAL_CAN_ERROR_BD:数据错误 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
该文档修改记录:
| 修改时间 | 修改说明 |
|---|---|
| 2024年4月8日 | 第一次发布,介绍了 A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用 |
总结
以上就是A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用的内容。
有不明白的地方欢迎留言;有建议欢迎留言,我后面编写文档好改进。
创作不容,如果文档对您有帮助,记得给个赞。
相关文章:

A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用
A5 STM32_HAL库函数 之 CAN通用驱动程序所有函数的介绍及使用 1 CAN通用驱动程序所有函数预览1.1 HAL_CAN_Init1.2 HAL_CAN_ConfigFilter1.3 HAL_CAN_DeInit1.4 HAL_CAN_MspInit1.5 HAL_CAN_MspDeInit1.6 HAL_CAN_Transmit1.7 HAL_CAN_Transmit_IT1.8 HAL_CAN_Receive1.9 HAL_C…...

python如何判断图片为黑白还是彩色
基本原理 灰度图分两种情况: 单通道的图片 RGB 三通道的图片,但是每个通道的值相等 对于单通道的图片只需要判断图片的通道值是否为1 对于RGB模式的图片,情况稍稍复杂些。理论上只需判断RGB三个通道的值是否相等,但是现实中灰度…...
C语言进阶课程学习记录-main函数与命令行参数
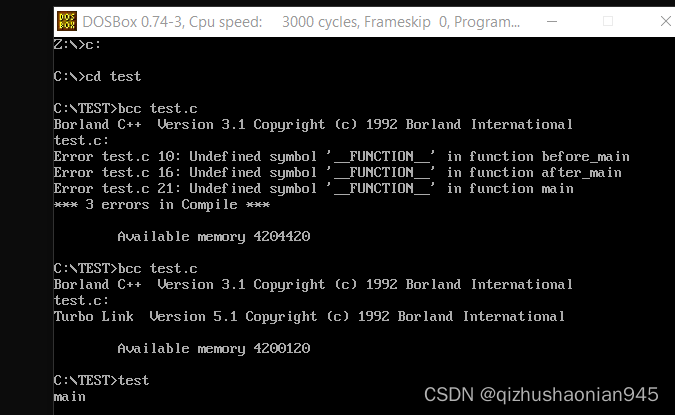
C语言进阶课程学习记录-main函数与命令行参数 main函数验证以下4中定义是否正确实验-main的返回值cmd窗口 实验-main的输入参数cmd窗口 在main函数执其执行的函数实验-程序执行的第一个函数gcc编译器cmd窗口bcc编译器 小结 本文学习自狄泰软件学院 唐佐林老师的 C语言进阶课程&…...

Utilize webcam to capture photo with camera
1. Official Guide& my github Official course my github 2. Overcome Webcam js Error in Chrome: Could not access webcam link 直接把代码拷贝到本机的下述目录下 To ignore Chrome’s secure origin policy, follow these steps. Navigate to chrome://flags/#un…...

【uniapp】开发微信小程序 — 注意事项
底部导航栏 (tabBar) 图标的正确做法: 1、图片的标准尺寸为 81px * 81px,该尺寸在官方的文档中有明确的说明,可以参考微信小程序全局配置文档中对 iconPath 属性的说明。 2、为了保持良好的间距,图片的内容区域设置 60px* 比较好&…...
the python tutorial
Using the Python Interpreter Using Python as a Calculator To do floor division and get an integer result you can use the // operator Problem Solving with Algorithms and Data Structures using Python 首先将其拉到本地? 按照craft的方式走一遍&…...

AIoT人工智能物联网之AI 实战
1. jetson-inference 入门 jetson-inference是官方推出的体验套件,提供了三种最常见的AI应用于计算机视觉的类型,imagenet用于 图像辨识 ( Image Recognition )、detectNet用于对象辨识 ( Object Detection )、segNet用于语义分割 可以先使用windows下载 jetson-inference(因…...

Python 大麦抢票脚本
请注意,编写或使用抢票脚本可能违反相关网站的服务条款和法律法规。以下内容仅供学习和了解技术原理之用,不鼓励或支持任何违反规定的行为。 在Python中编写大麦网抢票脚本通常涉及以下几个步骤: ### 1. 分析网站结构 - 使用浏览器的开发者…...

前端开发攻略---用JavaScript打造炫酷数字变化动画效果:手写实现你的自定义动画函数!支持更改任意数字、动画速度
1、演示 2、介绍 这篇文章将向您展示如何使用JavaScript来创建一个自定义的动画函数,以实现数字变化效果。我们将深入了解前端动画的本质,并通过手写代码来实现这个炫酷的数字变化动画效果。您将学到如何利用JavaScript来操作DOM元素,控制动画…...

【学习】移动端兼容性测试有什么方法及重要性
随着移动互联网的快速发展,移动应用程序已经成为人们日常生活中不可或缺的一部分。然而,由于各种移动设备的硬件和软件差异,移动应用程序的兼容性问题也越来越突出。因此,移动端兼容性测试成为了一个重要的环节,它可以…...
记录linux从0部署java项目(宝塔)
目录 一、安装宝塔可视化界面 二、部署前端 三、部署后端 1、配置并连接Mysql数据库 2、配置并连接redis 3、安装jdk 这里先记录一个安装后遇到的问题 安装openJDK 四、检查 一、安装宝塔可视化界面 宝塔面板下载,免费全能的服务器运维软件 运行安装脚本 安…...

Python的时间和日期:探索datetime模块
🚀 个人主页:xmp65535 🚀 专栏:python技术专栏 目录 一、前言 二、datetime 模块简介 三、基本使用 1.日期和时间的创建 2.获取当前日期和时间 3.时间戳与日期时间之间的转换 4.时间运算 5.格式化日期和时间 6.解析字符串…...

代理与反向代理
Java项目的代理与反向代理 1. 代理 定位:为客户端服务通信方向:客户端->代理服务器->远程服务器好处:对客户端行为进行过滤和控制;隐藏客户端IP地址;审计流量;缓存资源加快访问速度; 2…...

长风破浪会有时,直挂云帆济沧海
仅以此篇记录生活琐事,因为自己在初中就天天写日记,到了大学自己写日记的次数逐渐少了下来。 最近心不在焉,不知道为啥,也许是因为压力吧。在我这个年龄阶段的压力也许不一样吧,过几天又要参加自考的考试,自…...

jAavascript基础积累
深拷贝与浅拷贝 深拷贝(Deep Copy)和浅拷贝(Shallow Copy)是在编程中常用的概念,它们指的是复制对象或数组时的不同方式。让我们来详细解释它们,并列举一些例子: 浅拷贝(Shallow C…...

神经网络训练中batch的作用
在神经网络训练中,batch的作用主要包括以下几个方面: 减少内存占用和计算成本:在训练神经网络时,需要加载并处理大量的数据。使用batch训练可以将数据分成较小的批次,每次处理一小部分数据,从而减少内存占用…...

【grpc】grpc进阶一,再回首protobuf
在之前的章节里,我们了解了 protobuf 的基本规则和使用方法,生成了 grpc 代码并成功运行。那么我们还要思考一个问题,protobuf 文件到底该如何管理。我们知道 grpc 是区分客户端和服务端的,一般而言,客户端和服务端是分…...

iframe嵌入Vue页面实现免登方法
简介:实现一个功能需要使用iframe嵌入其它系统内部的一个页面,但嵌入后出现一个问题,就是一打开这个页面就会自动跳转到登录页,原因是被嵌入系统没有登录(没有token)肯定不让访问内部页面的,本文就是解决这个问题的。 …...
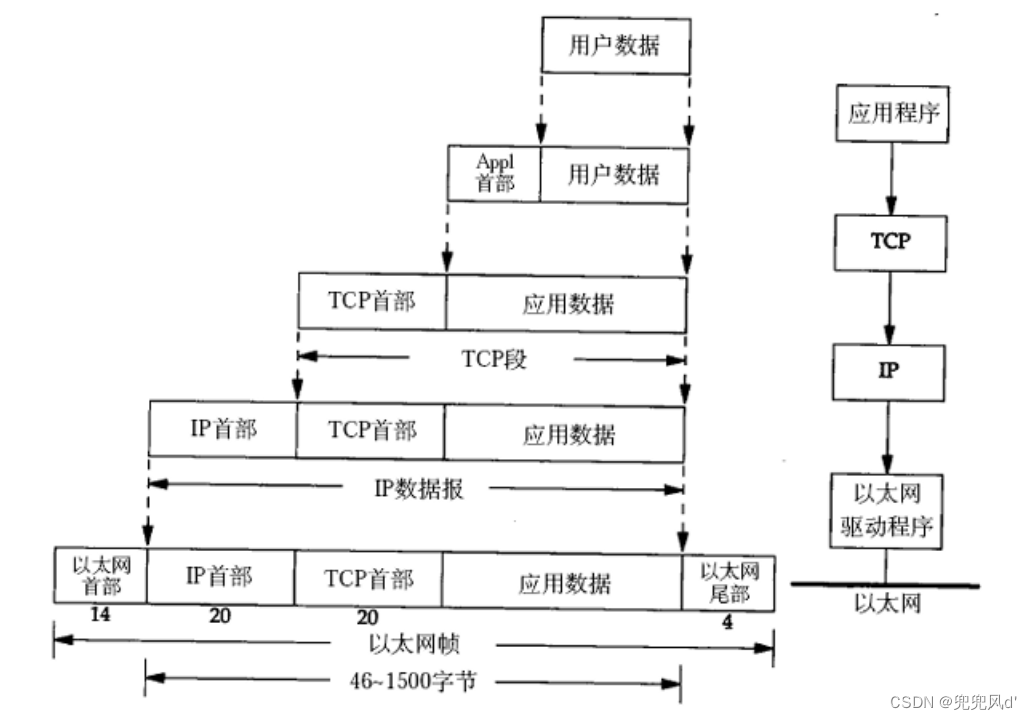
详解TCP/IP五层模型
目录 一、什么是TCP五层模型? 二、TCP五层模型的详细内容 1. 应用层 2. 传输层 3. 网络层 4. 数据链路层 5. 物理层 三、网络设备所在分层 封装和分⽤ 三、Java示例 引言: 在网络通信中,TCP/IP协议是至关重要的。为了更好地理解TCP协议的工…...

开创加密资产新纪元:深度解析ERC-314协议
随着加密资产市场的不断发展和区块链技术的日益成熟,新的协议和标准不断涌现,其中包括了ERC-314协议。本文将深入分析ERC-314协议的特点、功能以及对加密资产市场可能产生的影响。 1. ERC-314协议简介 ERC-314协议是一项建立在以太坊区块链上的新提案&a…...

2026年主流地图API AI功能开发与零代码工具横评
核心观点摘要 行业趋势判断:AI与零代码正深度融合地图API开发,推动位置智能从专业编码向业务自助快速演进,2026年主流平台将在多模态数据融合与行业化场景能力上形成分水岭。选型关键维度:需综合考量数据覆盖广度、模型智能水平、…...

Unity游戏任务系统框架解析:数据驱动与事件架构实战
1. 项目概述:一个为游戏开发者准备的灵活任务系统如果你正在开发一款RPG、开放世界或者任何需要任务驱动的游戏,那么“任务系统”绝对是你绕不开的核心模块。最近我在GitHub上发现了一个名为shomykohai/quest-system的开源项目,它不是一个完整…...

保姆级教程:用Lumerical FDTD参数扫描功能,分析WO3薄膜厚度对反射率的影响
从零到精通:Lumerical FDTD参数扫描在薄膜光学设计中的实战指南 在光电材料研究和器件设计中,薄膜厚度的精确控制往往直接影响器件的光学性能。以三氧化钨(WO₃)薄膜为例,其厚度变化会显著改变反射光谱特性,…...

Agnix:为AI智能体打造安全可控的操作系统级执行环境
1. 项目概述:从“智能体”到“操作系统”的范式跃迁最近在开源社区里,一个名为agent-sh/agnix的项目引起了我的注意。乍一看这个名字,agent和agnix的组合,很容易让人联想到这是又一个基于大语言模型的智能体(Agent&…...

模块二-数据选择与索引——06. 列选择与操作
06. 列选择与操作 1. 概述 数据选择是 Pandas 最常用的操作之一。掌握列选择与操作,可以高效地提取、添加、修改和删除数据列。 import pandas as pd import numpy as np# 创建示例数据 df pd.DataFrame({姓名: [张三, 李四, 王五, 赵六, 钱七],年龄: [25, 30, 28,…...

Maya-glTF插件深度解析:现代3D工作流中的glTF 2.0导出技术内幕
Maya-glTF插件深度解析:现代3D工作流中的glTF 2.0导出技术内幕 【免费下载链接】maya-glTF glTF 2.0 exporter for Autodesk Maya 项目地址: https://gitcode.com/gh_mirrors/ma/maya-glTF 在当今3D内容创作领域,Maya作为行业标准工具,…...

【收藏】2026测试人必看!再不学大模型AI,真的要被行业淘汰了
最近和身边做测试的朋友闲聊,发现大家的焦虑感比往年更重了——有人做了3年功能测试,跳槽面试连初筛都过不了;有人深耕性能测试5年,薪资原地踏步,反而被刚入行、懂AI测试的新人弯道超车。 从ChatGPT横空出世引爆AI行业…...
)
UWB-IMU、UWB定位对比研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
:Claude在长文档法律分析胜出32%,Gemini在实时多跳检索快4.8倍——你的业务该选谁?)
大模型选型生死局(企业CTO私藏对比清单):Claude在长文档法律分析胜出32%,Gemini在实时多跳检索快4.8倍——你的业务该选谁?
更多请点击: https://intelliparadigm.com 第一章:大模型选型生死局:Claude vs Gemini核心能力全景图 在企业级AI应用落地的关键阶段,模型选型已远非单纯比拼参数量或基准分数,而是对推理鲁棒性、上下文工程适配度、多…...

处理电商分类难题:我是如何用XGBoost为Otto数据集做多类别预测的
电商商品分类实战:XGBoost在Otto数据集上的高阶应用 当面对海量商品需要精准分类时,传统人工规则往往力不从心。Otto Group Product Classification Challenge正是这样一个典型场景——需要将数十万商品准确划分到93个类别中。本文将分享如何用XGBoost构…...