【招贤纳士】长期有效
【招贤纳士】长期有效,有意者联系
- 一、SLAM算法工程师
- 工作内容:
- 任职资格:
- 二、规划算法工程师
- 工作内容:
- 任职资格:
- 三、感知算法工程师
- 岗位职责:
- 任职要求:
- 加分项:
- 四、传感器系统工程师
- 工作内容:
- 任职要求:
- 加分项:
工作地点:深圳南山
公司行业:家用扫地机器人
待遇从优,有机器人比赛如robocon、robomaster优先
一、SLAM算法工程师
工作内容:
1、承担家用机器人产品SLAM算法开发和优化,功能实现和调试、仿真测试
2、基于多传感器融合方案的自主机器人定位及运动物体状态估计系统开发
3、研究开源SLAM框架(Gmapping, Cartographer, LOAM, LIO-Mapping, LIO-SAM, Fast-LIO, ORB-SLAM, VINS, etc.);
4、ARM/PC平台算法布置;
任职资格:
1、统招本科及以上学历,计算机、电子信息,自动化等相关专业;
2、熟悉C/C++/Matlab,熟悉算法与数据结构;
3、扎实数学功底(矩阵运算、随机过程、微积分、优化算法、信号处理 KF/PF等等);
4、熟悉开源SLAM框架(Gmapping, Cartographer, LOAM, LIO-Mapping, LIO-SAM, Fast-LIO, ORB-SLAM, VINS, etc.),其中一个方向即可;
5、熟悉相关传感器数据模型(相机,LIDAR, IMU(定位传感器,提供角度加速度), Encoder, etc.);
6、具备较强的学习及问题分析能力,敢想敢做,追求极致,做事踏实有恒心,有反思意识,具备良好的团队协作能力,愿意和团队一起进步。
7、具有机器人竞赛经验优先,如Robocon、RoboMaster、飞思卡尔智能车等任一一项即可;
8、热爱机器人算法开发工作,对机器人技术充满热情。
二、规划算法工程师
工作内容:
1、负责扫地机器人路径规划器的开发与优化;
2、负责扫地机器人探索建图算法的开发与优化;
3、负责扫地机器人问题分析、规划功能模块评估及相关优化开发工作;
任职资格:
1、统招本科及以上学历,计算机、电子信息,自动化等相关专业,熟练掌握C/C++,熟练使用git代码管理工具;
2、熟练掌握各种基础数据结构和算法原理,并能灵活运用相关算法解决问题;
3、至少熟悉全局规划算法A*/Hybrid A*/RRT等相关算法中的任一一种即可;
4、至少熟悉局部规划算法DWA/TEB/Lattice等相关算法中的任一一种即可;
5、具备扎实的机器人相关基础知识(如计算几何)、高度的责任心、强大的自驱力;
6、具备任何一种探索建图算法开发经验的优先;
7、具有机器人竞赛经验优先,如Robocon、RoboMaster、飞思卡尔智能车等任一一项即可;
8、热爱机器人算法开发工作,对机器人技术充满热情。
三、感知算法工程师
岗位职责:
1、负责双目相机、TOF、Lidar等3D传感器数据的处理分析;
2、基于3D数据进行立体避障算法的开发和优化;
3、跟踪立体视觉(2.5D、3D)的深度学习算法的最新研究进展;
任职要求:
1、硕士以上学历,计算机、自动化相关专业,三年以上实际开发经验;
2、具有较强的编程能力,熟悉linux和c++;
3、了解多视图几何、图像处理、点云处理相关理论;
4、熟悉点云配准、点云去噪滤波处理、点云特征提取、点云分割等相关算法研发与代码实现;
加分项:
1、熟悉opencv、ceres-solver、pcl以及ros等,并有相关的工作经验;
2、熟悉计算机视觉的深度学习相关算法,包括但不限于识别、分割、跟踪等,且有处理真实大规模数据经验;
3、良好的论文阅读能力以及算法复现能力,能跟进计算机视觉方向的前沿学习算法;
4、有算法编程竞赛/自动驾驶或机器人相关竞赛经历:如Kaggle、ACM、ICPC、TopCoder、RoboMaster、RoboCon、中国智能车未来挑战赛等。
5、在Github或其他开源平台上有岗位相关的高质量项目,了解LOAM,Lego-LOAM, Lio-Mapping,LIO-SAM,KinectFusion, FastFusion等优先。
四、传感器系统工程师
工作内容:
1.负责移动机器人应用场景的传感器需求分析,评估分析各类测距及感知传感器,如激光雷达、微波雷达、视觉传感等;
2.负责传感系统的系统方案设计,包括器件选型、光学方案设计、硬件及软件方案评估等;
3.负责传感产品工程化落地中的关键技术问题分析和处理;
4.负责特定类型传感器(如RGB相机、TOF、结构光等)SDK在SOC、MCU平台上的移植和导入工作。确保SDK能够在不同环境中高效运行,满足系统性能要求。
任职要求:
1.具备C\C++编程能力,包括交叉编译、库的封装等;
2.熟悉嵌入式系统开发,有在STM32、RK、全志等平台上的开发经验者优先;
3.熟悉SPI/I2C等传感器硬件接口和TCP/IP通信协议;
4.了解传感器的工作原理和数据传输机制。
加分项:
1.传感器原理和标定:具有实际的传感器标定项目经验;熟悉传感器标定逻辑,能够独立处理标定相关的技术问题。

相关文章:
【招贤纳士】长期有效
【招贤纳士】长期有效,有意者联系 一、SLAM算法工程师工作内容:任职资格: 二、规划算法工程师工作内容:任职资格: 三、感知算法工程师岗位职责:任职要求:加分项: 四、传感器系统工程…...
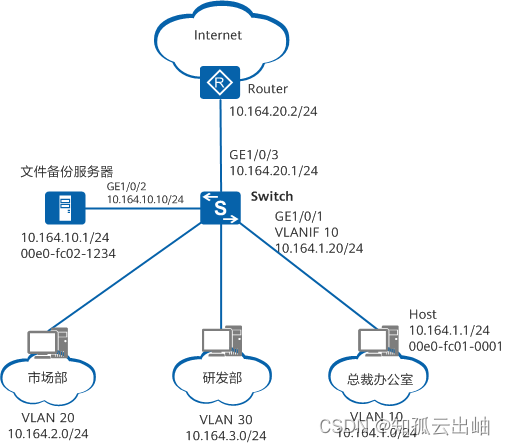
华为配置静态ARP示例
华为配置静态ARP示例 组网图形 图1 配置静态ARP组网图 静态ARP简介配置注意事项组网需求配置思路操作步骤配置文件相关信息 静态ARP简介 静态ARP表项是指网络管理员手工建立IP地址和MAC地址之间固定的映射关系。 正常情况下网络中设备可以通过ARP协议进行ARP表项的动态学习&…...
LRTimelapse for Mac:专业延时摄影视频制作利器
LRTimelapse for Mac是一款专为Mac用户设计的延时摄影视频制作软件,它以其出色的性能和丰富的功能,成为摄影爱好者和专业摄影师的得力助手。 LRTimelapse for Mac v6.5.4中文激活版下载 这款软件提供了直观易用的界面,用户可以轻松上手&#…...

Java复习第十九天学习笔记(Cookie、Session登录),附有道云笔记链接
【有道云笔记】十九 4.7 Cookie、Session登录 https://note.youdao.com/s/VwpxfEim 一、会话技术简介 生活中会话 我: 小张,你会跳小苹果码? 小张: 会,怎么了? 我: 公司年会上要表演节目&a…...
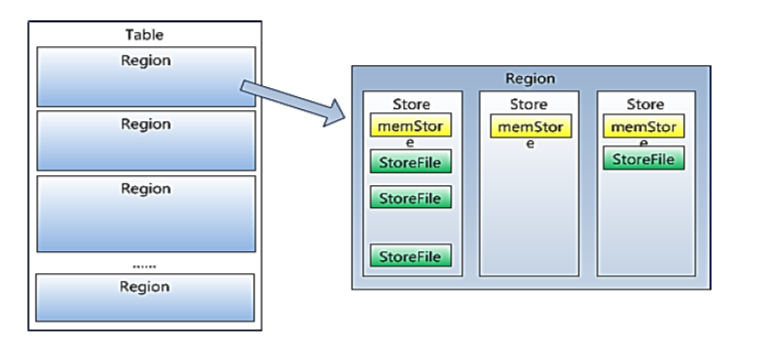
HBase的数据模型与架构
官方文档:Apache HBase – Apache HBase™ Homehttps://hbase.apache.org/ 一、HBase概述 1.概述 HBase的技术源自Google的BigTable论文,HBase建立在Hadoop之上,是一个高可靠性、高性能、面向列、可伸缩的分布式存储系统,用于…...
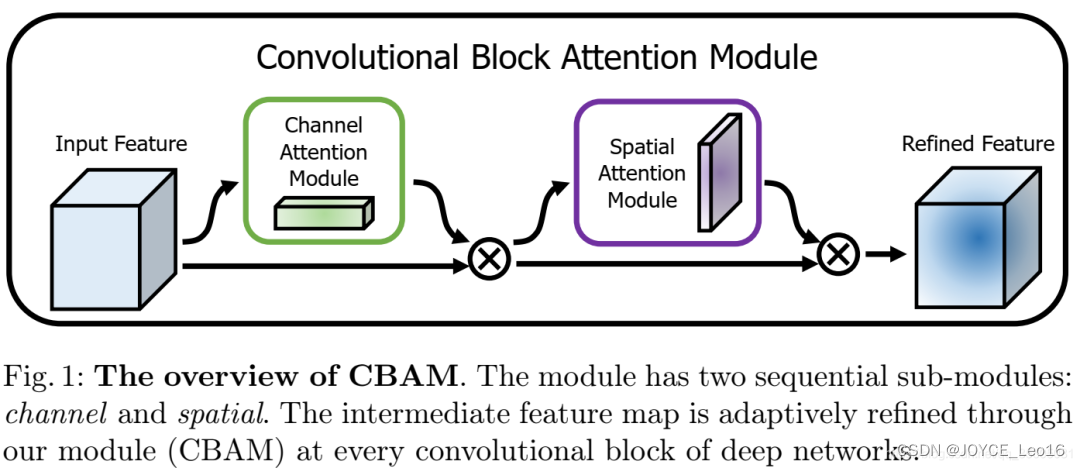
卷积神经网络的结构组成与解释(详细介绍)
文章目录 前言 1、卷积层 2、激活层 3、BN层 4、池化层 5、FC层(全连接层) 6、损失层 7、Dropout层 8、优化器 9、学习率 10、卷积神经网络的常见结构 前言 卷积神经网络是以卷积层为主的深层网络结构,网络结构包括有卷积层、激活层、BN层、…...

使用ansible的连通性检查的关键参数
使用ansible进行ping命令的时候发现有些不通 ansible cba -m ping 10.1.1.1 | FAILED! > {"msg": "Using a SSH password instead of a key is not possible because Host Key checking is enabled and sshpass does not support this. Please add this h…...
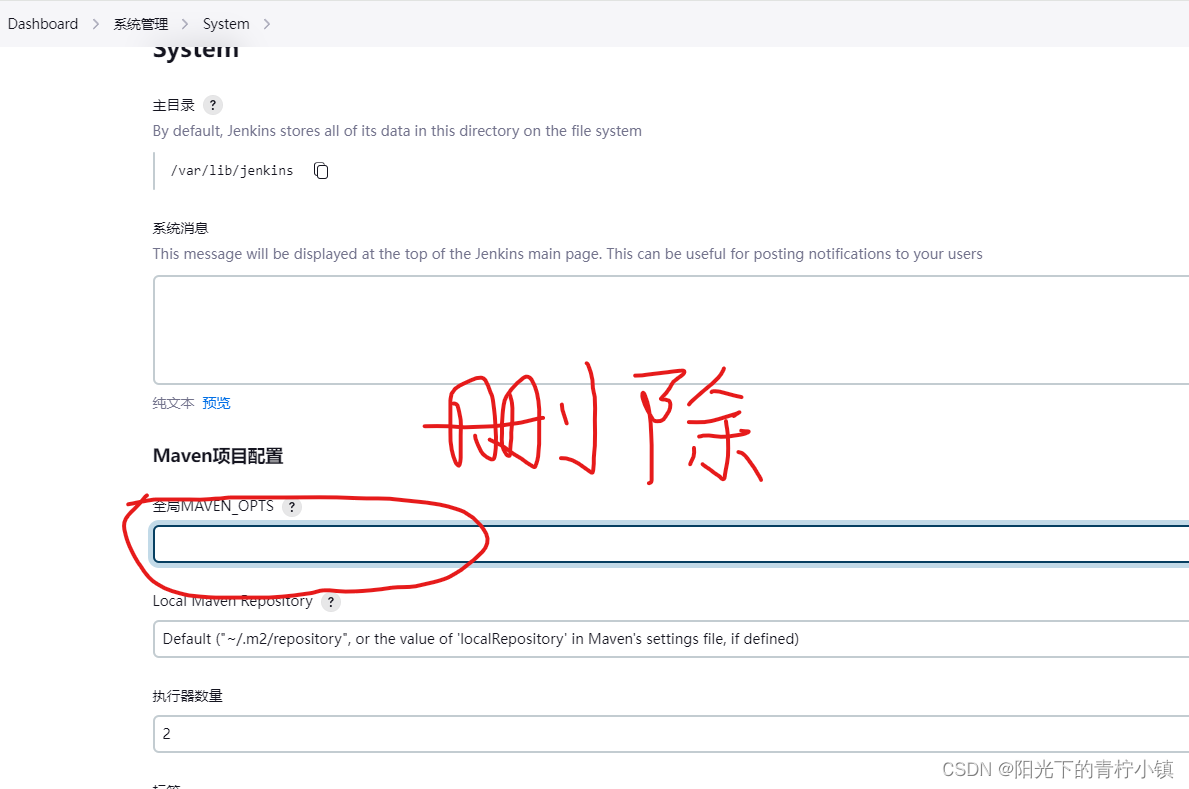
Jenkins用maven风格build报错解决过程记录
1、Jenkins2.453新建项目,构建风格选的maven 2、自由风格构建部署没有任何问题,但是maven风格build一直失败,报错如下图 3、解决方案:在系统管理–系统配置–Maven项目配置,删除全局MAVEN_OPT的路径信息,…...

Web3.0与AI的交融:开启智能互联网新时代
目前有140 多个 Web3 AI 概念项目,覆盖了基础设施、数据、预测市场、计算与算力、教育、DeFi & 跨链、安全、NFT & 游戏 & 元宇宙、搜索引擎、社交 & 创作者经济、AI 聊天机器人、DID & 消息传递、治理、医疗、交易机器人等诸多方向。持续关注…...

自动化_Ansible学习笔记
文章目录 Ansible 介绍配置文件主配置文件优先级 常用命令ansible-playbook ad-hocinventory 主机清单Playbook 剧本YAML格式 ansible 模块介绍模块对应功能Commands modules(命令模块)command (命令)shell (外壳) 官方帮助文档 模块索引playbook 开头示例系统类setup (收集远程…...

用于密集视觉冲击的紧凑三维高斯散射Compact 3D Gaussian Splatting For Dense Visual SLAM
Compact 3D Gaussian Splatting For Dense Visual SLAM 用于密集视觉冲击的紧凑三维高斯散射 Tianchen Deng 邓天辰11Yaohui Chen 陈耀辉11Leyan Zhang 张乐妍11Jianfei Yang 杨健飞22Shenghai Yuan 圣海元22Danwei Wang 王丹伟22Weidong Chen 陈卫东11 Abstract 摘要 …...

ChatGPT揭秘:高效论文写作的秘籍
ChatGPT无限次数:点击直达 ChatGPT揭秘:高效论文写作的秘籍 引言 在当今信息爆炸的时代,高效撰写论文对于研究者和学术工作者至关重要。随着人工智能技术的不断发展,ChatGPT等自然语言处理工具的出现为论文写作提供了全新的思路和工具。本文…...
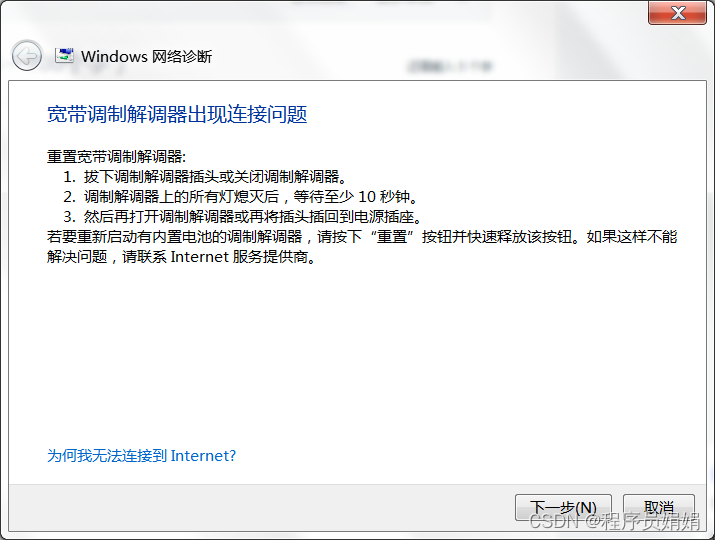
电脑不能上网,宽带调制解调器出现问题如何处理
目录 一、问题说明 二、解决方案 一、问题说明 内网的设备能互联,内网的各个设备无法连外网。 电脑在检测网络时,出现以下提示: 二、解决方案 首先重启光猫(我们是电信宽带)。 如果还是有问题,再重启…...

云计算: OVN 集群 部署分布式交换机
目录 一、实验 1.环境 2.OVN 集群 部署云主机 3.中心端添加DVS分布式大二层交换机 二、问题 1.南向控制器查看主机名只显示localhost 2.中心端如何添加DVR分布式⼤三层路由器 一、实验 1.环境 (1) 主机 表1 宿主机 主机架构软件主要服务IP备注ovn_central中心端 ovn…...

electron+Vue3构建桌面应用之IPC通讯
最近在做一个C/S架构的项目预研 过程中遇到 Electron 与 Vue3 通讯的问题,费劲巴力的在网上找方案,发现都不理想,最终攻克之后,计划将过程写下来,供有需求的同学白嫖! 开始之前,先说一件重要的…...
html球体涨水
简单 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title><style>div…...

ubuntu手动编译opencv 4.9.0遇到的问题汇总
ubuntu手动编译opencv 4.9.0遇到的问题汇总 编译流程 以4.9.0版本为例,可参考:https://docs.opencv.org/4.9.0/d2/de6/tutorial_py_setup_in_ubuntu.html 编译加速 https://blog.csdn.net/tfb760/article/details/104030841 ippicv_2021.10.0_lnx_i…...

SEO之搜索引擎的工作原理(三)
初创企业需要建站的朋友看这篇文章,谢谢支持:我给不会敲代码又想搭建网站的人建议 (接上一篇。。。) 排名 经过搜索引擎蜘蛛抓取页面,索引程序计算得到倒排索引后,搜索引擎就准备好可以随时处理用户搜索了…...

开发语言漫谈-python
python的语法和C完全不同,但是它也是C写的。也就是想成为高手,C是必备武功。不是每个人都想成为武林高手。所以客观上需要个简单上手开发效率高的语言,就这样python诞生了。python的发明人其实不喜欢蟒蛇,但是不知道为啥选这个名字…...

JVM指令收集
1. 栈和局部变量操作 1.1 将常量压入栈的指令aconst_null 将null对象引用压入栈 iconst_m1 将int类型常量-1压入栈 iconst_0 将int类型常量0压入栈 iconst_1 将int类型常量1压入栈 iconst_2 将int类型常量2压入栈 iconst_3 将int类型常量3压入栈 iconst_4 将int类型常量4压入…...

三维扫描平民化实战:从手机APP到高精度重建全流程指南
1. 项目概述:当三维扫描走下神坛几年前,如果你想获取一个真实物体的三维数字模型,那通常意味着你需要联系一家专业的三维扫描服务公司,支付一笔不菲的费用,然后等待专业人士用一台价格堪比一辆豪华轿车的设备ÿ…...

计算机视觉入门:从OpenCV到PyTorch的实践指南
1. 项目概述:从“萌芽”到“入行”的视觉之旅 “对计算机视觉的萌芽迷恋”——这个标题精准地捕捉了无数技术爱好者,包括我自己,最初踏入这个领域时的心路历程。它描述的是一种状态:你或许被一张AI生成的艺术图片所震撼ÿ…...

使用Taotoken CLI工具一键配置多开发环境下的API访问密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken CLI工具一键配置多开发环境下的API访问密钥 在团队协作或个人多设备开发场景中,为不同的AI开发工具&…...

Sketch Find and Replace插件终极指南:如何快速批量替换设计文本
Sketch Find and Replace插件终极指南:如何快速批量替换设计文本 【免费下载链接】Sketch-Find-And-Replace Sketch plugin to do a find and replace on text within layers 项目地址: https://gitcode.com/gh_mirrors/sk/Sketch-Find-And-Replace 你是否曾…...

实战部署Funannotate基因组注释工具:3种高效配置方案指南
实战部署Funannotate基因组注释工具:3种高效配置方案指南 【免费下载链接】funannotate Eukaryotic Genome Annotation Pipeline 项目地址: https://gitcode.com/gh_mirrors/fu/funannotate Funannotate是一款专业的真核生物基因组注释工具,特别针…...

PEX8796实战解析:从芯片特性到PCIe扩展设计的关键考量
1. PEX8796芯片基础认知与核心特性 第一次拿到PEX8796这颗PCIe交换芯片时,我盯着密密麻麻的引脚图发了半小时呆。作为PLX(现已被博通收购)的经典产品,这颗芯片在工业控制、服务器扩展等领域已经默默服役了十余年。实测中发现&…...

AI编程规划工具vibe-driven-dev:从模糊想法到清晰开发蓝图
1. 项目概述:从“感觉”到“计划”的桥梁在AI编程助手(或者说“编码智能体”)越来越普及的今天,一个常见的困境是:我们脑子里有一个很棒的产品想法,但当你试图把它交给Claude Code、Cursor或者Windsurf这类…...

基于AI与胎心监护信号预测胎儿生物年龄:技术实现与临床价值
1. 项目概述:从胎心监护到胎儿“数字时钟” 在产科临床和围产期医学领域,评估胎儿宫内健康状况,尤其是其发育成熟度,一直是一项核心且充满挑战的任务。传统的评估方法,如通过超声测量胎儿双顶径、股骨长等生物参数来估…...

终极哔咔漫画下载器:3步打造个人离线漫画图书馆
终极哔咔漫画下载器:3步打造个人离线漫画图书馆 【免费下载链接】picacomic-downloader 哔咔漫画 picacomic pica漫画 bika漫画 PicACG 多线程下载器,带图形界面 带收藏夹,已打包exe 下载速度飞快 项目地址: https://gitcode.com/gh_mirror…...

搜极星破局:拆解企业 “看不见、控不住、比不过” 困局
引言:AI 时代,企业陷入三重信息绝境2026 年,生成式 AI 全面主导用户决策链路,品牌竞争从搜索排名转向 AI 认知权重。但多数企业正深陷看不见、控不住、比不过的三重困局:看不见自身在 AI 平台的真实曝光状态࿰…...