map、set底层封装模拟实现(红黑树)
文章目录
- 一、红黑树
- 1.1红黑树的规则:
- 1.2红黑树的插入操作
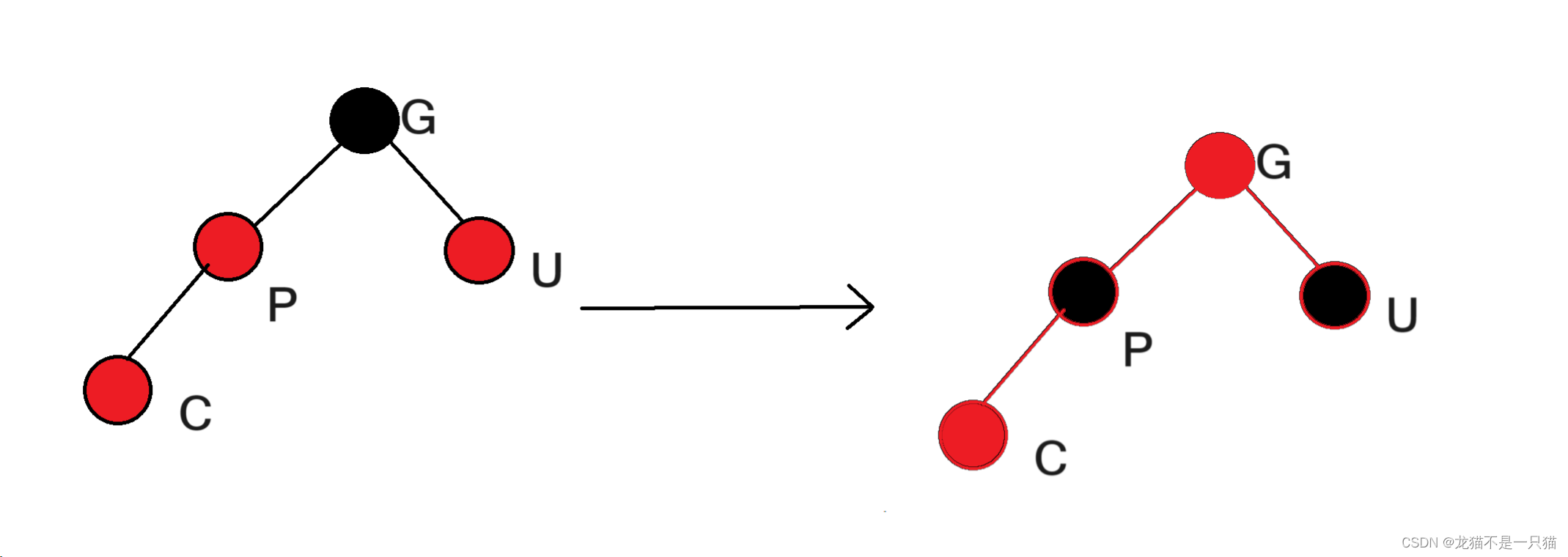
- 1.2.1不需要旋转(如果叔叔存在且为红,这里的C表示孩子,P表示父亲,U表示叔叔,G表示祖父),包含四种情况,无论孩子在哪里,都是只需要改变叔叔和父亲的颜色为黑,祖父为红,然后向上继续走,C = G
- 1.2.2需要旋转(左旋,右旋,左右双旋,右左双旋),叔叔不存在或者为黑
- 1.2红黑树的插入代码
- 1.3红黑树的整体框架
- 二、map、set的底层封装
- 2.1set的底层封装
- 2.2map的底层封装
- 2.3红黑树的底层封装
一、红黑树
相较于前面的AVL树,红黑树的优势是:旋转次数减少,效率提高了,同时还保留了AVL树的查找优势
1.1红黑树的规则:
1.每个节点不是红色就是黑色
2.红色节点的孩子一定是黑色节点
3.不能有连续的红色节点
4.每条路径(走到空为止)上的黑色节点数量相同
5.最短路径<=最长路径<=2最短路径(当某条路径只有黑色节点,而另一条路径红色节点数量和黑色节点相同,那么最长路径就是最短路路径的两倍)
1.2红黑树的插入操作
1.2.1不需要旋转(如果叔叔存在且为红,这里的C表示孩子,P表示父亲,U表示叔叔,G表示祖父),包含四种情况,无论孩子在哪里,都是只需要改变叔叔和父亲的颜色为黑,祖父为红,然后向上继续走,C = G
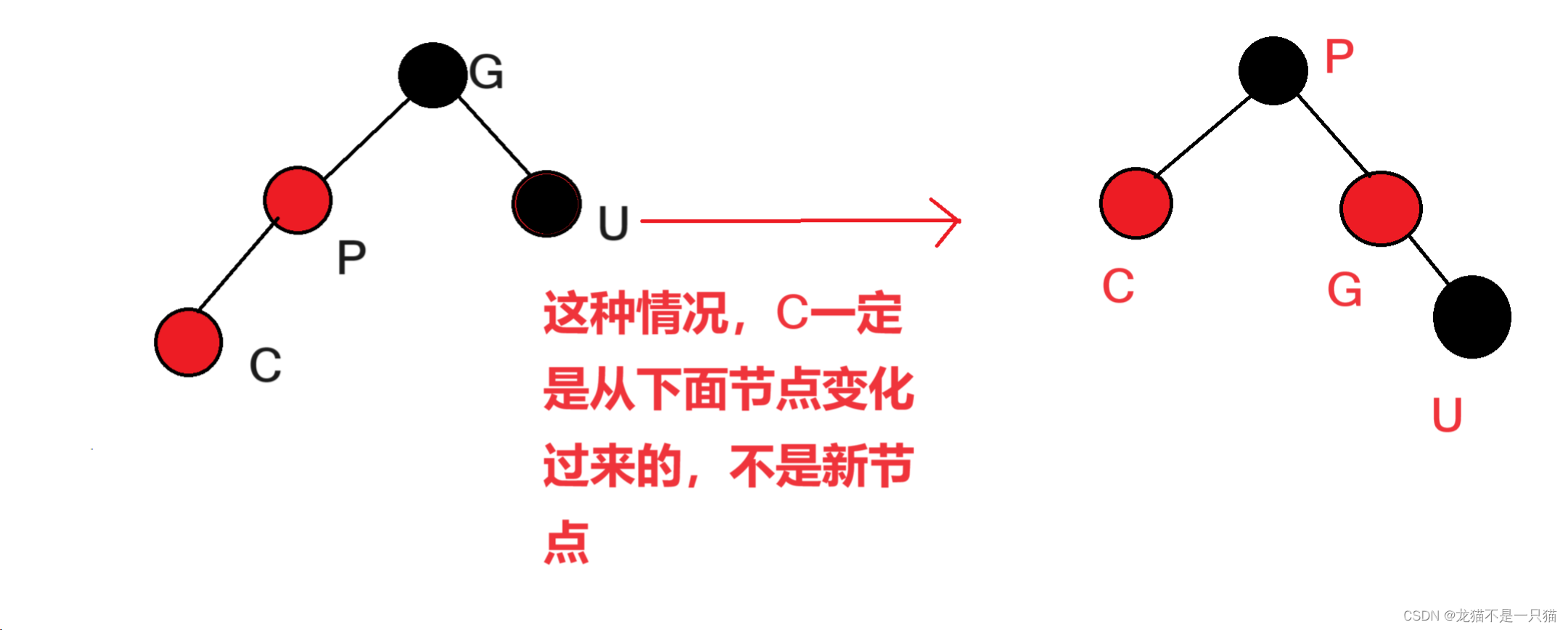
1.2.2需要旋转(左旋,右旋,左右双旋,右左双旋),叔叔不存在或者为黑
右旋的情况(这里省略了C,P,U所连的节点)
左右双旋的情况(这里省略了C,P,U所连的节点)

下面两种情况省略
1.2红黑树的插入代码
bool Insert(const pair<K, V>& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}Node* cur = _root;Node* parent = nullptr;while (cur){if (data.first > cur->_data.first){parent = cur;cur = cur->_right;}else if (data.first < cur->_data.first){parent = cur;cur = cur->_left;}elsereturn false;}cur = new Node(data);if (parent->_data.first > cur->_data.first)parent->_left = cur;elseparent->_right = cur;cur->_parent = parent;//判断父亲是否为红,为黑就不管while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//叔叔存在且为红{uncle->_col = parent->_col = BLACK;grandfather->_col = RED;cur = grandfather;//继续向上处理parent = cur->_parent;}else{if (cur == parent->_left){//叔叔为黑或者叔叔不存在RotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{RotateL(parent);RotateR(grandfather);cur->_col = BLACK;parent->_col = RED;}break;}}else{Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){uncle->_col = parent->_col = BLACK;grandfather->_col = RED;cur = grandfather;//继续向上处理parent = cur->_parent;}else{if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppnode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (ppnode == nullptr){_root = subR;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}
}void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppnode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}
}1.3红黑树的整体框架
#pragma once
#include<iostream>
#include<assert.h>
using namespace std;//颜色定义
enum color
{RED,BLACK
};template<class K,class V>
struct RBTreeNode
{typedef RBTreeNode<K, V> Node;pair<K, V> _data;Node* _left;Node* _right;Node* _parent;color _col;//构造函数RBTreeNode(const pair<K, V>& data):_left(nullptr), _right(nullptr), _parent(nullptr), _col(RED), _data(data){}
};template<class K,class V>
class RBTree
{
public:typedef RBTreeNode<K, V> Node;bool Insert(const pair<K, V>& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}Node* cur = _root;Node* parent = nullptr;while (cur){if (data.first > cur->_data.first){parent = cur;cur = cur->_right;}else if (data.first < cur->_data.first){parent = cur;cur = cur->_left;}elsereturn false;}cur = new Node(data);if (parent->_data.first > cur->_data.first)parent->_left = cur;elseparent->_right = cur;cur->_parent = parent;//判断父亲是否为红,为黑就不管while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//叔叔存在且为红{uncle->_col = parent->_col = BLACK;grandfather->_col = RED;cur = grandfather;//继续向上处理parent = cur->_parent;}else{if (cur == parent->_left){//叔叔为黑或者叔叔不存在RotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{RotateL(parent);RotateR(grandfather);cur->_col = BLACK;parent->_col = RED;}break;}}else{Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){uncle->_col = parent->_col = BLACK;grandfather->_col = RED;cur = grandfather;//继续向上处理parent = cur->_parent;}else{if (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}void Inorder(){_Inorder(_root);}private:void _Inorder(Node* root){if (root == nullptr)return;_Inorder(root->_left);cout << root->_data.first << endl;_Inorder(root->_right);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppnode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (ppnode == nullptr){_root = subR;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppnode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}}Node* _root = nullptr;
};二、map、set的底层封装
这里我们需要加上迭代器和仿函数(为了套用同一个红黑树的模版)
map有两个模版参数、set只有一个模版参数,因此我们需要加一个仿函数来确定是map还是set
2.1set的底层封装
namespace SF
{//仿函数template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:typedef typename RBTree<K,const K, SetKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const K& key){return _t.Insert(key);}private:RBTree<K,const K, SetKeyOfT> _t;};
}
2.2map的底层封装
namespace SF
{template<class K,class V> class map{struct MapKeyOfT{const K& operator()(const pair<K,V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const pair<K,V>& data){return _t.Insert(data);}private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}
2.3红黑树的底层封装
#pragma once
#include<vector>enum Colour
{RED,BLACK
};template<class T>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;Colour _col;T _data;RBTreeNode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){}
};template<class T>
struct RBTreeIterator
{typedef RBTreeNode<T> Node;typedef RBTreeIterator<T> Self;Node* _node;RBTreeIterator(Node* node):_node(node){}T& operator*(){return _node->_data;}T* operator->(){return &_node->_data;}Self& operator++(){if (_node->_right){// 右子树的中序第一个(最左节点)Node* subLeft = _node->_right;while (subLeft->_left){subLeft = subLeft->_left;}_node = subLeft;}else{// 祖先里面孩子是父亲左的那个Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = cur->_parent;}_node = parent;}return *this;}Self& operator--(){// return *this;}bool operator!=(const Self& s){return _node != s._node;}bool operator== (const Self & s){return _node == s._node;}
};// set->RBTree<K, K, SetKeyOfT>
// map->RBTree<K, pair<K, V>, MapKeyOfT>// KeyOfT仿函数 取出T对象中的key
template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:typedef RBTreeIterator<T> iterator;iterator begin(){Node* subLeft = _root;while (subLeft && subLeft->_left){subLeft = subLeft->_left;}return iterator(subLeft);}iterator end(){return iterator(nullptr);}bool Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}KeyOfT kot;Node* parent = nullptr;Node* cur = _root;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(data); // 红色的if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;// 情况一:叔叔存在且为红if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上处理cur = grandfather;parent = cur->_parent;}else{// 情况二:叔叔不存在或者存在且为黑// 旋转+变色if (cur == parent->_left){// g// p u// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// p u// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{Node* uncle = grandfather->_left;// 情况一:叔叔存在且为红if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续往上处理cur = grandfather;parent = cur->_parent;}else{// 情况二:叔叔不存在或者存在且为黑// 旋转+变色// g// u p// cif (cur == parent->_right){RotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p// cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}}private:Node* _root = nullptr;
};
相关文章:
map、set底层封装模拟实现(红黑树)
文章目录 一、红黑树1.1红黑树的规则:1.2红黑树的插入操作1.2.1不需要旋转(如果叔叔存在且为红,这里的C表示孩子,P表示父亲,U表示叔叔,G表示祖父),包含四种情况,无论孩子在哪里&…...

PHP8.2-xlswriter 扩展
https://pecl.php.net/package/xlswriter ### 进入/root/ cd ~ ### 下载扩展 wget https://pecl.php.net/get/xlswriter-1.5.5.tgz ### 解压扩展 tar -zxvf xlswriter-1.5.5.tgz ### 进入扩展目录 cd xlswriter-1.5.5 ### 查找对应php版本的phpize find / -name phpi…...

imx6ull开发板设置SD卡启动,SD卡中烧写uboot,kernel,设备树,根文件系统fs
IMX6ULL ARM Linux开发板SD卡启动,SD卡的分区与分区格式化创建_sd制作分区-CSDN博客...

2024年第七届可再生能源与环境工程国际会议(REEE 2024)即将召开!
2024年第七届可再生能源与环境工程国际会议(REEE 2024)将于2024 年8月28-30日在法国南特举行。共绘绿色未来,全球同频共振!REEE 2024将汇聚全球可再生能源与环境工程领域的专家学者和业界精英,共同探讨行业发展的前沿技…...
【华为】NAT的分类和实验配置
【华为】NAT的分类和实验配置 NAT产生的技术背景IP地址分类NAT技术原理NAT分类静态NAT动态NATNAPTEasy IP(PAT)NAT Server 配置拓扑静态NAT测试抓包 动态NAT测试抓包 NAPT测试抓包 PAT测试抓包 NAT Server检测抓包 PC1PC2服务器 NAT产生的技术背景 随着…...
拉普拉斯丨独家冠名2024年度ATPV技术分论坛,助力产业科技持续创新
为了进一步促进行业技术交流,推进光伏行业发展及标准建设的进程,针对高效电池,领跑组件,新产品认证及应用等技术专题及国内外光伏标准的最新进程,由中国绿色供应链联盟光伏专委会(ECOPV)指导的2…...

LangChain入门教程 - 使用代理Agent
对于大模型,比如某些场景,需要数学计算,或者需要从某些网站获取参考资料,就必须使用专门的代理来完成任务。这里我们使用langchain提供的数学工具来实现一个最简单的例子,下一篇我们会讲如何自己实现代理。 首先创建一…...
)
windows驱动开发-内核编程技术汇总(五)
使用安全字符串函数 和应用层不一样的是,windows内核完全使用Unicode字符串,许多支持AsciiC的windowsAPI,是在应用层完成项Unicode的切换的。许多系统安全问题是由缓冲区处理不善和生成的缓冲区溢出引起的。 糟糕的缓冲区处理通常与字符串操…...

Java中的optional类是啥和例子
Optional 是 Java 8 引入的一个容器对象,用于表示值存在或不存在。这是一个可以为 null 的容器对象,但使用 Optional 比直接使用 null 更安全,因为 Optional 类提供了许多有用的方法,以便更优雅地处理可能存在或不存在的值。 使用…...

AI大模型探索之路-训练篇16:大语言模型预训练-微调技术之LoRA
系列篇章💥 AI大模型探索之路-训练篇1:大语言模型微调基础认知 AI大模型探索之路-训练篇2:大语言模型预训练基础认知 AI大模型探索之路-训练篇3:大语言模型全景解读 AI大模型探索之路-训练篇4:大语言模型训练数据集概…...

mysql事务锁排查
-- mysql show full PROCESSLIST; -- 查看哪些表在锁。 show open tables where IN_use>0; -- 正在执行的事务: SELECT * FROM information_schema.INNODB_TRX;-- 8.0之前 查看正在锁的事务 select * from information_schema.innodb_locks;-- 查看等待锁的事务 …...
ChatGPT变懒原因:正在给自己放寒假!已被网友测出
ChatGPT近期偷懒严重,有了一种听起来很离谱的解释: 模仿人类,自己给自己放寒假了~ 有测试为证,网友Rob Lynch用GPT-4 turbo API设置了两个系统提示: 一个告诉它现在是5月,另一个告诉它现在是1…...
C#标签设计打印软件开发
1、新建自定义C#控件项目Custom using System; using System.Collections.Generic; using System.Text;namespace CustomControls {public class CommonSettings{/// <summary>/// 把像素换算成毫米/// </summary>/// <param name="Pixel">多少像素…...
Springboot+vue+小程序+基于微信小程序的在线学习平台
一、项目介绍 基于Spring BootVue小程序的在线学习平台从实际情况出发,结合当前年轻人的学习环境喜好来开发。基于Spring BootVue小程序的在线学习平台在语言上使用Java语言进行开发,在数据库存储方面使用的MySQL数据库,开发工具是IDEA。…...
正点原子[第二期]Linux之ARM(MX6U)裸机篇学习笔记-13-按键实验
前言: 本文是根据哔哩哔哩网站上“正点原子[第二期]Linux之ARM(MX6U)裸机篇”视频的学习笔记,在这里会记录下正点原子 I.MX6ULL 开发板的配套视频教程所作的实验和学习笔记内容。本文大量引用了正点原子教学视频和链接中的内容。…...
ubuntu与redhat的不同之处
华子目录 什么是ubuntu概述 ubuntu版本简介桌面版服务器版 安装部署部署后的设置设置root密码关闭防火墙启用允许root进行ssh登录更改apt源安装所需软件 安装nginx安装apache网络配置Netplan概述配置详解配置文件DHCP静态IP设置设置 软件安装方法apt安装软件作用常用命令配置ap…...
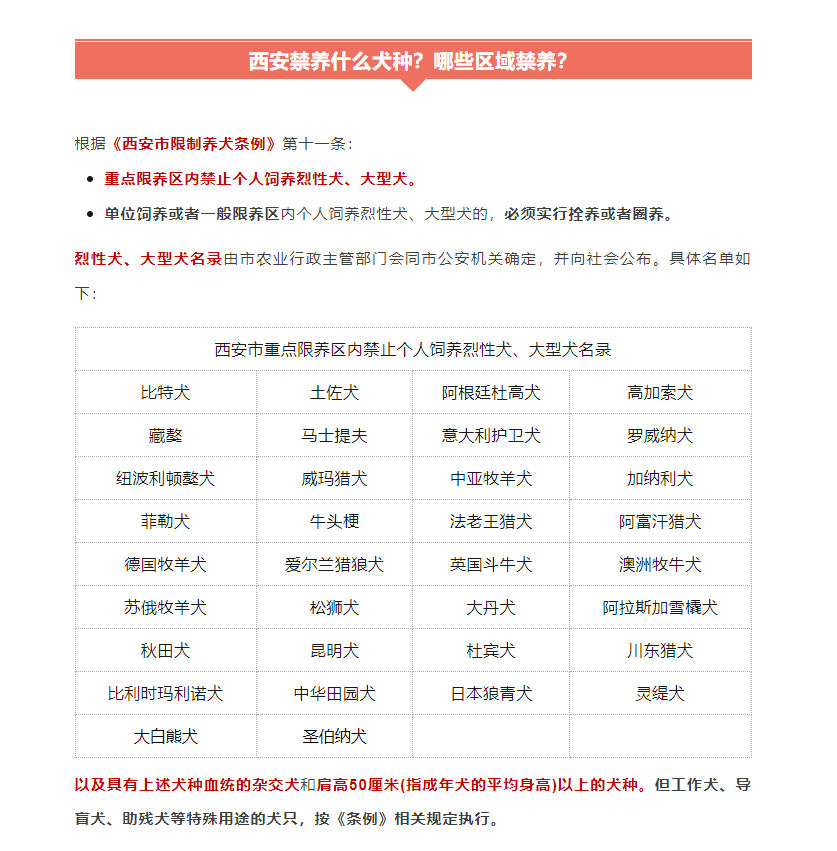
三岁孩童被家养大型犬咬伤 额部撕脱伤达10公分
近期,一名被家养大型犬咬伤了面部的3岁小朋友,在被家人紧急送来西安国际医学中心医院,通过24小时急诊门诊简单救治后,转至整形外科,由主治医师李世龙为他实施了清创及缝合手术。 “患者额部撕脱伤面积约为10公分&…...
“不会传递默认事件参数)
@click=“handleClick()“不会传递默认事件参数
当你使用click"handleClick()"这种形式绑定事件处理器时,Vue会将它视为一个函数调用,而不是一个事件监听器。在这种情况下,Vue不会自动传递原生事件对象作为默认参数。 如果你想让Vue自动传递原生事件对象作为默认参数,…...

KVM安装Ubuntu24.04简要坑点以及优点
本机环境是ubuntu22.04的环境,然后是8核16线程 ssd是500的 目前对于虚拟机的选择,感觉kvm确实会更加流畅,最重要的一点是简洁,然后实际安装效果也比较的好,如果对于速度方面希望快一点,并且流畅一点的话这…...
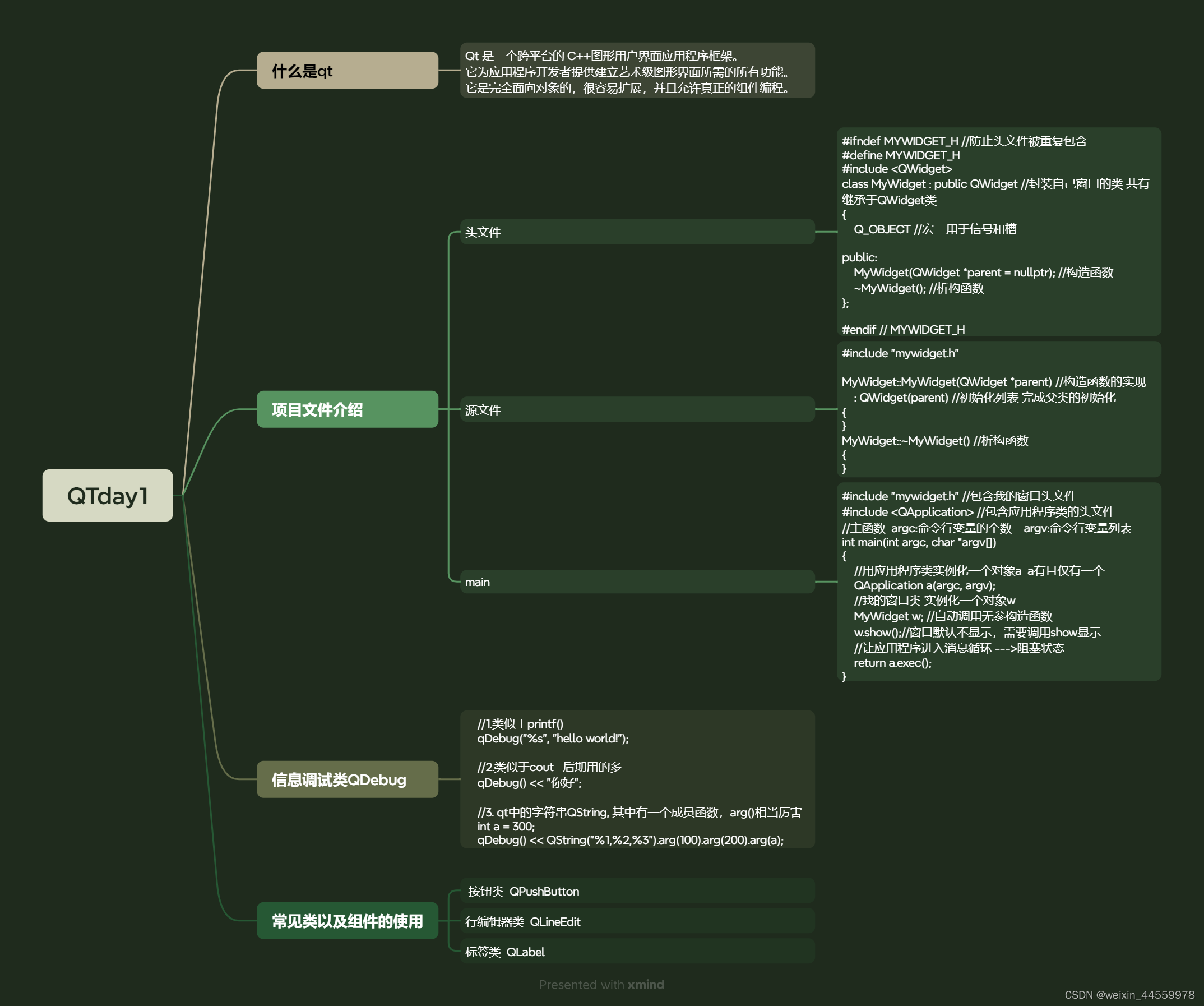
QT_day1
#include "mywidget.h"MyWidget::MyWidget(QWidget *parent): QWidget(parent) {//修改窗口标题this->setWindowTitle("4.6.0");//修改窗口图标this->setWindowIcon(QIcon("C:\\Users\\zj\\Desktop\\yuanshen\\icon"));//修改窗口大小this…...

LobsterPress v5.0:为AI Agent构建长期记忆系统的架构与实践
1. 项目概述:为AI Agent构建“数字海马体”如果你和我一样,长期与ChatGPT、Claude这类大语言模型打交道,一定会被一个核心问题困扰:它们记性太差了。无论你昨天花了多少时间与AI深入探讨一个项目细节,今天开启新对话时…...

509-qwen3.5-9b csdn tmux
技术文章大纲:Qwen(通义千问)技术解析与应用实践 Qwen概述 背景与研发团队:阿里巴巴达摩院推出的开源大语言模型系列核心定位:支持多语言、多模态的通用AI助手版本迭代:从Qwen-7B到Qwen-72B的模型规模演进 …...

KeyMapper终极指南:重新定义Android设备按键功能的完整教程
KeyMapper终极指南:重新定义Android设备按键功能的完整教程 【免费下载链接】KeyMapper An Android app to remap the buttons on your devices 项目地址: https://gitcode.com/gh_mirrors/ke/KeyMapper 你是否曾想过自定义Android设备的按键功能?…...

PS2游戏逆向工程:从MIPS机器码到x86重编译的实践解析
1. 项目概述:一个逆向工程与代码重编译的实践最近在逆向工程和游戏修改社区里,一个名为ajitmohapatr/ps2-recomp-Agent-SKILL的项目引起了我的注意。乍一看这个标题,充满了特定领域的“黑话”——“PS2”指向了经典的PlayStation 2游戏主机&a…...

Linux系统编程-makefile文件与make命令的使用
目录 一.makefile文件 1.1什么是makefile 1.2 makefile的一、二、三 1.2.1 一个规则 (1) 两个基本原则: (2) 使用 ALL 来指定makefile的终极目标: 1.2.2 两个函数 (1) src $(wildcard *.c) (2) obj $(patsubst %.c, %.o, $(src)) 1.2.3 三个…...

Vivado HLS高效IP开发与优化实战指南
1. Vivado HLS高效IP开发实战解析在FPGA设计领域,高层次综合(HLS)技术正在彻底改变传统RTL设计流程。作为Xilinx设计套件的核心组件,Vivado HLS允许开发者直接使用C/C等高级语言描述硬件功能,通过自动化转换生成优化的…...

截断重加权核范数低秩稀疏分解模型与RPCA应用【附代码】
✨ 本团队擅长数据搜集与处理、建模仿真、程序设计、仿真代码、EI、SCI写作与指导,毕业论文、期刊论文经验交流。 ✅ 专业定制毕设、代码 ✅如需沟通交流,点击《获取方式》 (1)自适应对数截断核范数与变换域稀疏先验的联合模型&am…...
)
现代生产级微服务+容器治理完整技术栈与架构方案详解(国内主流完整云原生微服务闭环架构)
文章目录一、业务开发层(代码基座,所有业务的底层核心)1.1 核心开发框架基座1.2 持久层与分库分表框架1.3 统一认证授权体系(企业必备)二、微服务治理层(保障高可用,简历核心亮点)2.…...

Silvaco TCAD新手必看:迁移率模型到底怎么选?从CONMOB到ANALYTIC的保姆级指南
Silvaco TCAD迁移率模型选择指南:从理论到实践的完整决策框架 半导体器件仿真中,迁移率模型的选择往往让初学者感到无从下手。我第一次接触Silvaco TCAD时,面对CONMOB、ANALYTIC、KLAASSEN等十几种模型选项,花了整整两周时间才弄明…...
)
别再让扰动拖后腿!手把手教你用MATLAB/Simulink实现非线性系统的干扰观测器(附完整代码)
非线性系统扰动观测器实战:从理论到MATLAB代码的完整实现指南 在控制工程实践中,非线性系统的干扰抑制一直是工程师面临的棘手挑战。想象一下,你正在调试一台工业机械臂,理论模型完美无缺,但实际运行时总是出现无法解…...