场景文本检测识别学习 day09(Swin Transformer论文精读)
Patch & Window
- 在Swin Transformer中,不同层级的窗口内部的补丁数量是固定的,补丁内部的像素数量也是固定的,如上图的红色框就是不同的窗口(Window),窗口内部的灰色框就是补丁(Patch)
- 如果输入图像的宽W、高H,增加到原来的两倍,那么输入图像的总面积(总像素数量)就增加到原来的四倍(2H * 2W = 4HW)
- 在ViT中,由于窗口是固定的,且就是整个输入图片,所以当我们将输入图片分割成很多个尺寸为16 * 16 的patch时,如果输入图像的总面积增加到原来的四倍,那么patch的数量也会变成原来的四倍,那么计算复杂度 O ( N 2 ⋅ d ) O( N^2 · d) O(N2⋅d),就变成了 O ( ( 4 N ) 2 ⋅ d ) = O ( 16 N 2 ⋅ d ) O( (4N)^2 · d) = O( 16N^2 · d) O((4N)2⋅d)=O(16N2⋅d),其中d是每个patch的维度,N是patch的数量。因此,对于ViT来说,计算复杂度是跟图像增加的大小成平方关系
- 在Swin Transformer中,由于窗口不是固定的,但是窗口内部的补丁数量是固定的,补丁的尺寸也是固定的,所以当我们将输入图片的总面积增加到原来的四倍,那么只有窗口的数量增加到原来的四倍,那么计算复杂度 O ( M 2 ⋅ N ⋅ d ) O( M^2 · N · d) O(M2⋅N⋅d),就变成了 O ( M 2 ⋅ 4 N ⋅ d ) O( M^2 · 4N · d) O(M2⋅4N⋅d),其中M是每个窗口内补丁的数量,N是窗口的数量,d是每个补丁patch的维度。(虽然每个patch的维度都不一样,这里先不管了)
Swin Transformer
Swin Transformer 提出ViT具有两个缺点:
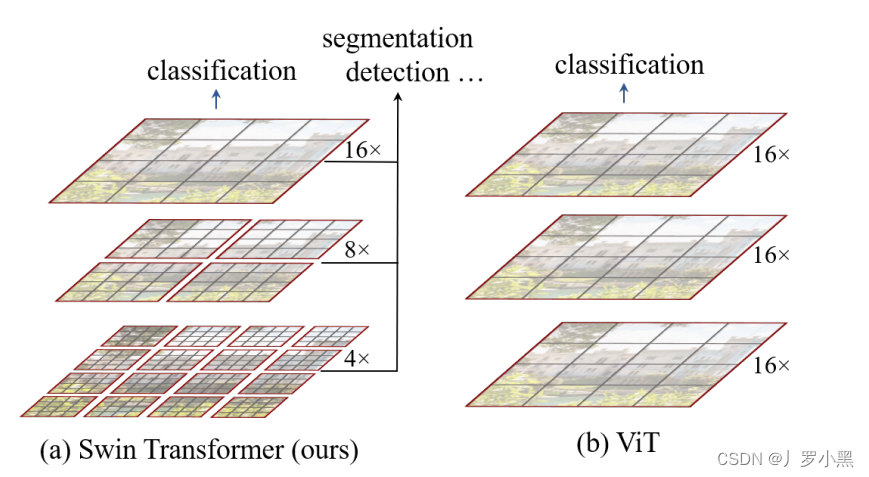
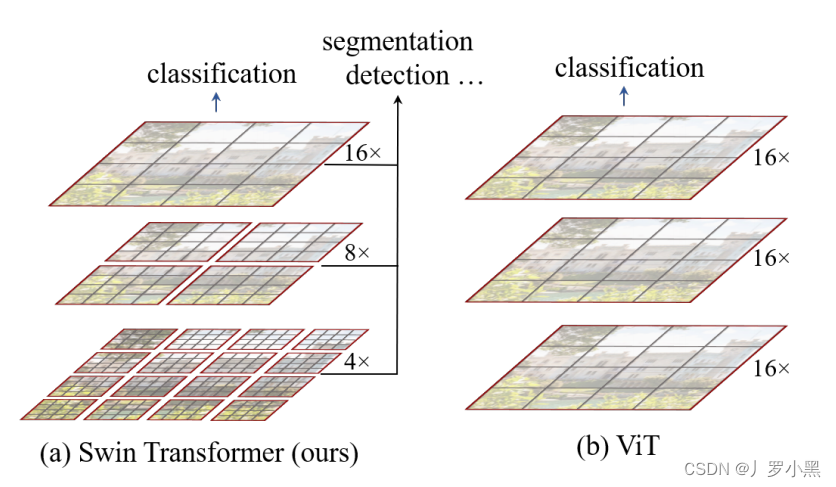
1. 没有多尺度特征 ,不能生成多尺度的特征图传给FPN (检测) \ U-Net (分割),从而对于不同大小的物体都能进行良好感知
3. 全局计算自注意力浪费资源,并且计算复杂度跟图像增加的大小成平方关系
对于以上缺点,Swin Transformer给出了以下的解决方法:
- 不同于ViT—在整张输入图片上进行自注意力计算。Swin Transformer是在窗口内进行自注意力计算的,同时这个窗口又是包含固定数量的patch,每个patch的尺寸也是固定的。由于在图像领域中,同一个物体的不同部位、或语义相似的不同物体大概率会出现在相邻的地方,所以没必要像ViT那样–对整张图进行自注意力操作,其实可以借鉴CNN卷积的局部性的归纳偏置,在一个小的局部窗口内进行自注意力计算,也是差不多够用的。所以Swin Transformer使用了尺寸不一的窗口来避免序列长度过大,从而节约计算资源。
- 不同于ViT— 在每个Transformer Encoder Block上都是做相同尺寸的自注意力操作,得到的也是相同尺寸的特征。Swin Transformer在不同尺寸的窗口内做自注意力操作,从而得到不同尺寸的特征图,也就是多尺度的特征图。
- 在Swin Transformer中,这叫做patch merging。这跟CNN的池化操作很类似,CNN通过池化Pooling,来增大每一个卷积核能看到的感受野,从而使每次池化后的卷积核能够抓住不同尺寸的物体。
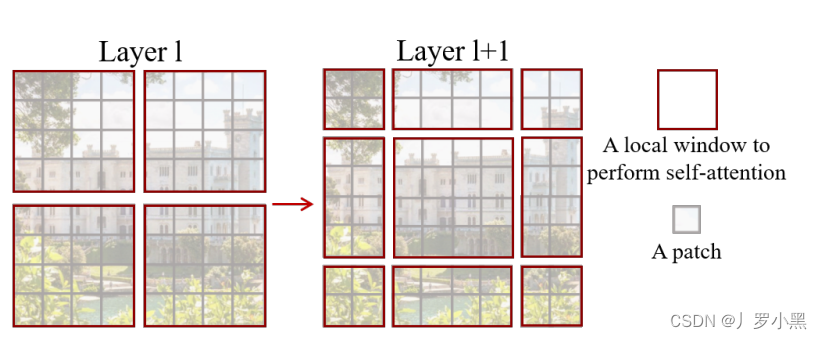
- 在Swin Transformer中,灰色的格子叫patch是最小的计算单元(尺寸为4 * 4),红色的格子叫window是中等的计算单元,最小的窗口里有7 * 7个patch,通过将整张图分成不同的窗口,只计算窗口内的自注意力,可以极大程度的减小序列长度,减小计算复杂度。
- shifted window是指:先将左侧图中的分割线往右下移动两个patch,然后将左上角变大后的窗口重新按中心分割成四个窗口,再将分割线往左上移动两个patch,就变成右图的样子。
- shifted window 和 patch merging的好处如下:
- 当我们进行注意力计算的时候,只在Swin Transformer的局部窗口内进行局部自注意力计算,相比ViT的全局窗口来说,可以减少序列长度,节省内存,加快计算。
- 因为自注意力都是只在窗口内进行,所以如果不进行shift,那么某个窗口内的patch就永远无法注意到其他窗口内patch的信息,这就违背了Transformer的初衷—更好的理解上下文,掌握全局信息。但是经过shift之后,比如中间的窗口,就是由之前四个窗口的patch组成的,也就表示中间窗口进行自注意力计算后,可以关注到其他窗口的信息,窗口和窗口之间可以进行交互(Cross-Window Connection)
- 再加上之前的patch merging,那么在不断合并的时候,每个patch可以注意到很多其他窗口的patch信息,即每个patch的感受野会不断增大
- 因此虽然我们计算的是每个窗口内的局部自注意力,但是实际上它近似等于一个全局的自注意力。
池化
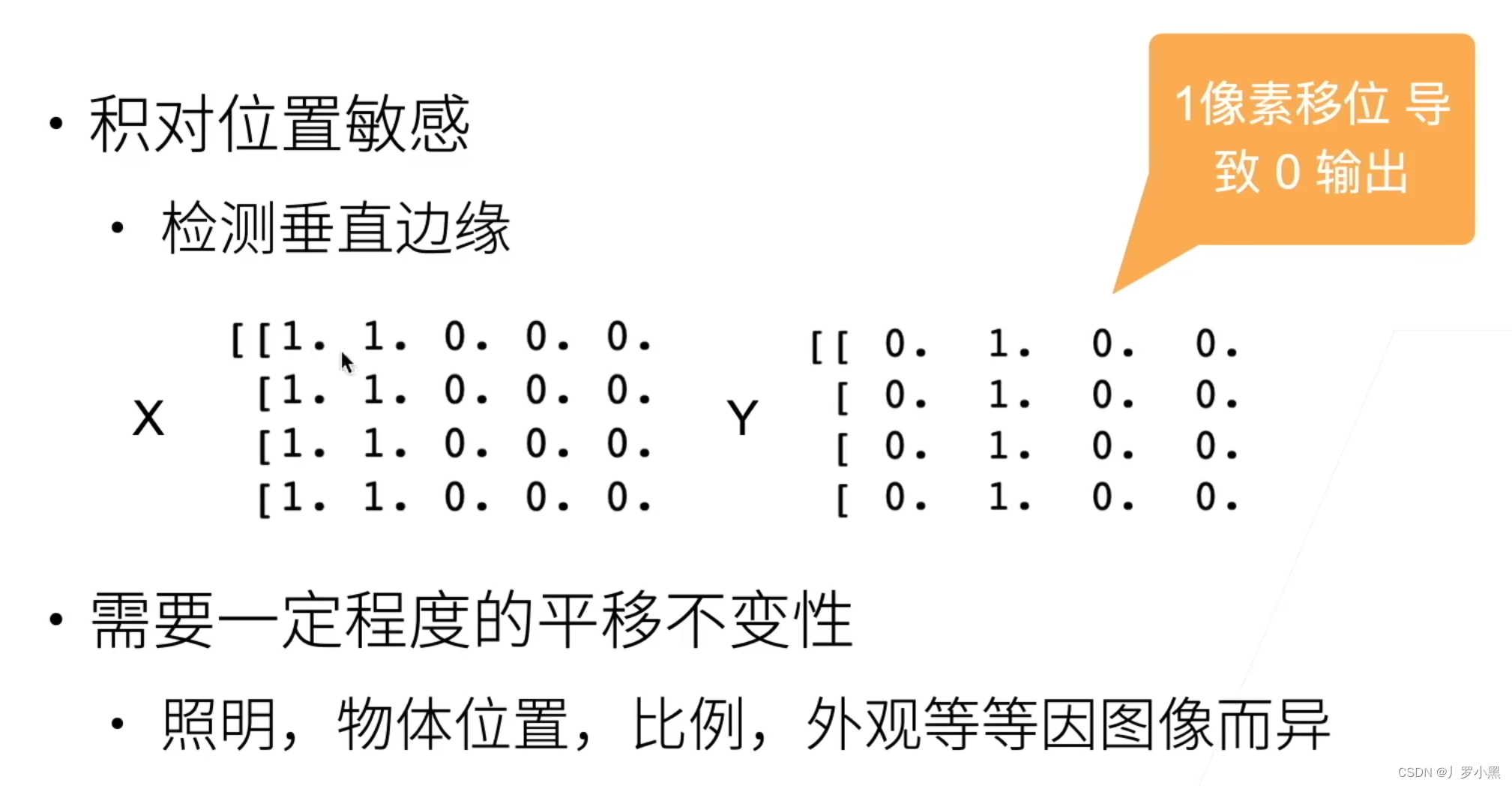
- 如果使用卷积核大小为(1 * 2)具体为 [1 , -1],由于卷积操作对位置很敏感,所以对最左侧的输入进行卷积之后,得到的结果只有一列是1,即边缘会检测不准,如果当图片发生微小改变后,边缘经过卷积都会发生变化。所以卷积对于位置的敏感性不是一个很好的事。因此最好能具有一定程度的平移不变性,即当图片发生微小的改变,卷积结果不会发生改变。
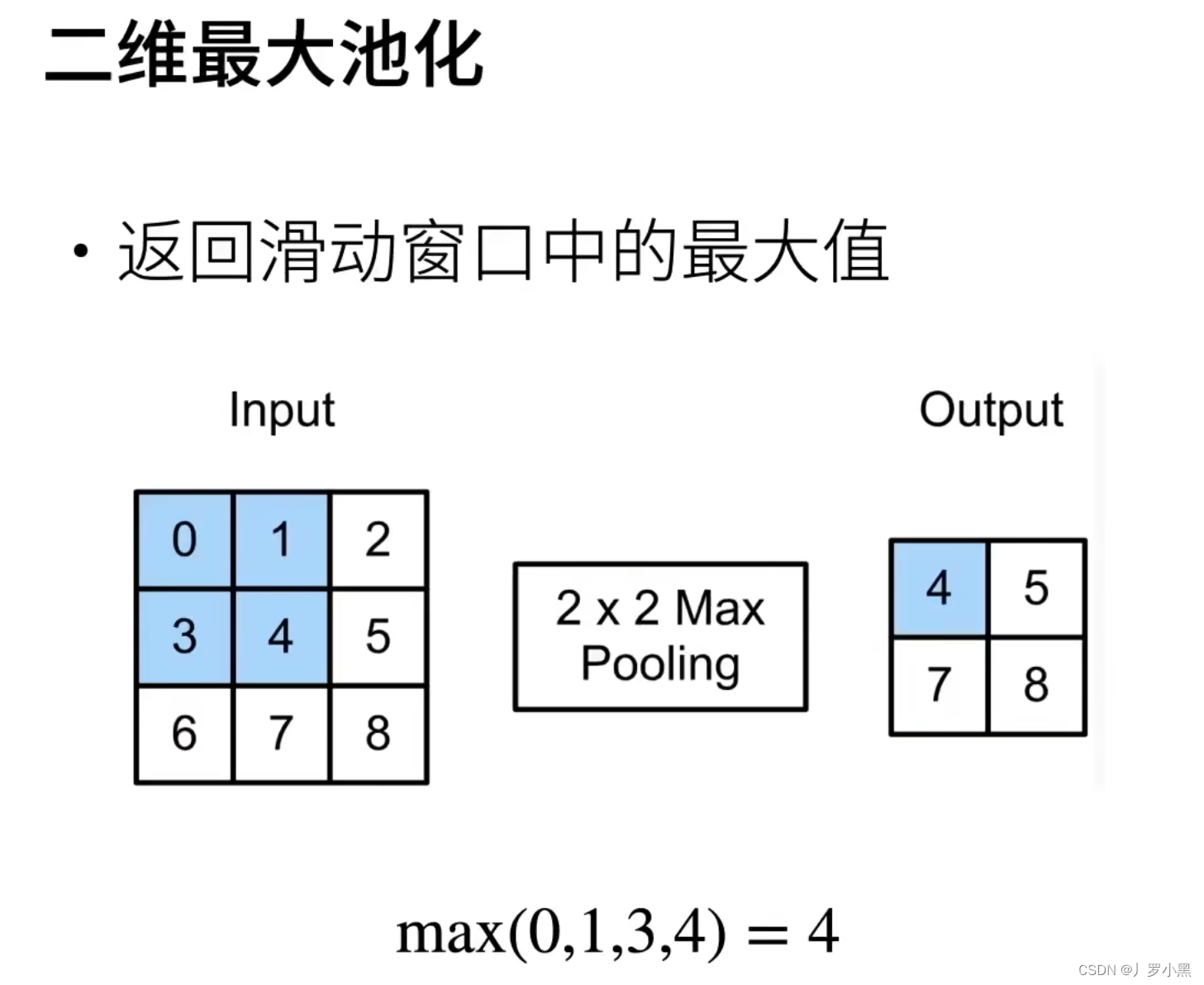
- 所以往往在卷积之后加入池化操作,以上是二维最大池化的示意过程
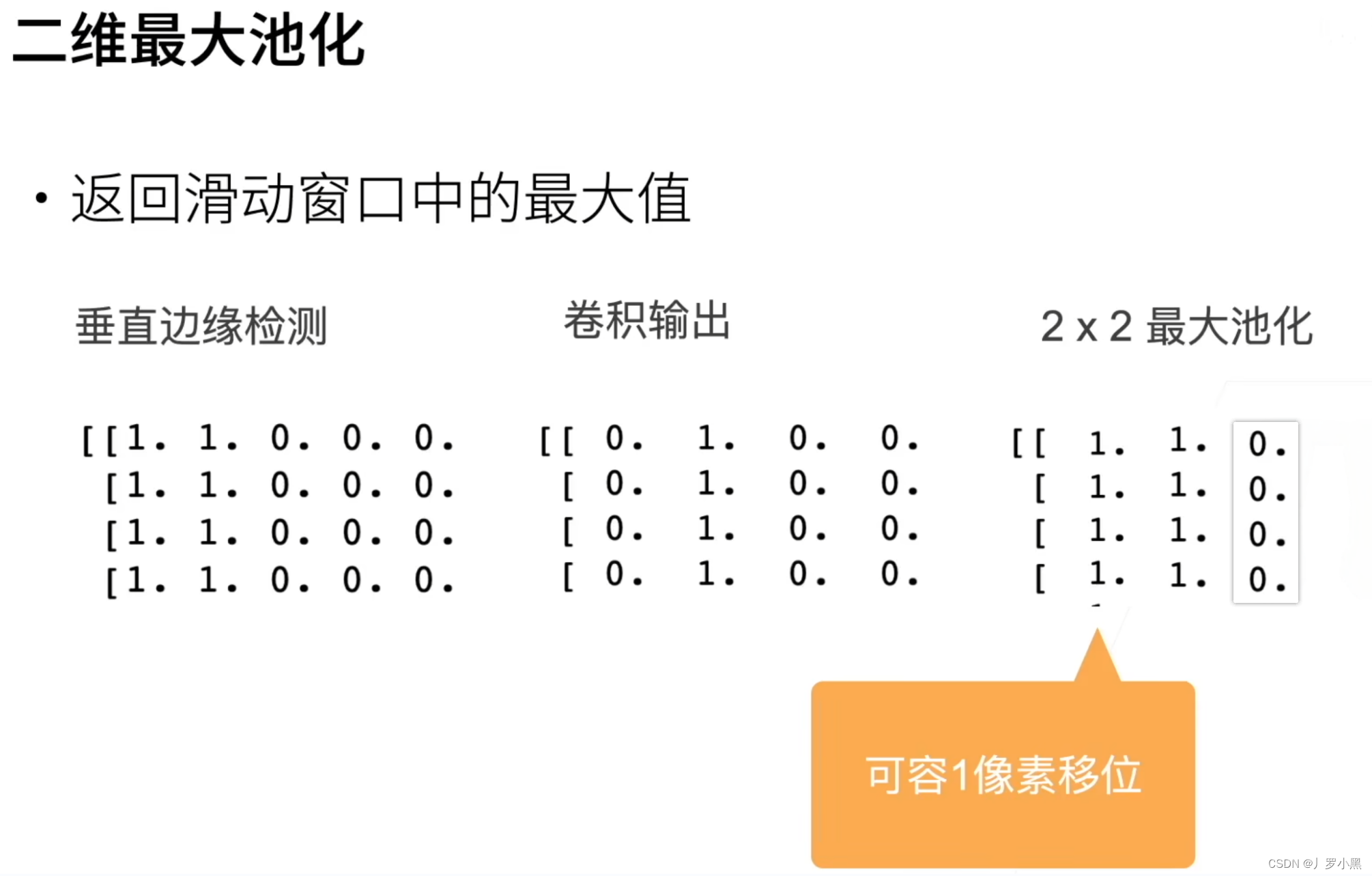
- 通过二维最大池化的结果可以看出,池化的操作近似于模糊化,在卷积输出的值附近出现多次同样的值。
- 池化层和卷积层类似,都有填充和步幅
- 但是池化层没有可学习的参数,直接从输入中选取值了
- 池化层的输出通道数等于输入通道数,即在每个输入通道应用池化层来获得相对应的输出通道。(由于卷积层可以改变通道,而池化层往往是跟在卷积层后面,所以池化层就不需要改变通道数了)
相关文章:
场景文本检测识别学习 day09(Swin Transformer论文精读)
Patch & Window 在Swin Transformer中,不同层级的窗口内部的补丁数量是固定的,补丁内部的像素数量也是固定的,如上图的红色框就是不同的窗口(Window),窗口内部的灰色框就是补丁(Patch&#…...

抖音小店个人店和个体店有什么不同?区别问题,新手必须了解!
哈喽~我是电商月月 新手开抖音小店入驻时会发现,选择入驻形式时有三个选择,个人店,个体店和企业店 其中,个人店和个体店只差了一个字,但个人店不需要营业执照,是不是入驻时选择个人店会更好一点呢&#x…...

动态规划入门和应用示例
文章目录 前言斐波那契数列爬楼梯总结优点:缺点: 前言 动态规划(Dynamic Programming,DP)是运筹学的一个分支,是求解决策过程最优化的数学方法。它主要用于解决一类具有重叠子问题和最优子结构性质的问题。…...
【C语言】精品练习题
目录 题目一: 题目二: 题目三: 题目四: 题目五: 题目六: 题目七: 题目八: 题目九: 题目十: 题目十一: 题目十二: 题目十…...
数据库(MySQL)—— DML语句
数据库(MySQL)—— DML语句 什么是DML语句添加数据给全部字段添加数据批量添加数据 修改数据删除数据 什么是DML语句 在MySQL中,DML(Data Manipulation Language,数据操纵语言)语句主要用于对数据库中的数…...

【最大公约数 并集查找 调和级数】1998. 数组的最大公因数排序
本文涉及知识点 最大公约数 并集查找 调和级数 LeetCode1998. 数组的最大公因数排序 给你一个整数数组 nums ,你可以在 nums 上执行下述操作 任意次 : 如果 gcd(nums[i], nums[j]) > 1 ,交换 nums[i] 和 nums[j] 的位置。其中 gcd(nums…...

iOS实现一个高性能的跑马灯
效果图 该跑马灯完全通过CATextLayer 实现,轻量级,并且通过 系统的位移动画实现滚动效果,避免了使用displaylink造成的性能瓶颈,使用系统动画,系统自动做了很多性能优化,实现更好的性能,并使用…...

MySQL的视图、存储过程、触发器
视图 介绍 视图是一种虚拟存在的表。视图中的数据并不在数据库中实际存在,行和列数据来自定义视图的查询中使用的表,并且是在使用视图时动态生成的。通俗的讲,视图只保存了查询的SQL逻辑,不保存查询结果。所以我们在创建视图的时…...

【图像特征点匹配】
图像特征点匹配 图像特征点匹配是计算机视觉中的一项关键技术,它涉及在两个或多个图像之间寻找并匹配具有独特属性的点,这些点被称为特征点。 立体视觉:通过匹配同一场景的不同视角图像中的特征点,可以重建场景的三维结构。物体识别:通过匹配物体表面的特征点,可以识别和…...

GZIPOutputStream JSON压缩
一、背景 小王瞥了一眼历史记录表,不禁惊呼:“这表怎么这么大?”同事们闻声纷纷围拢过来查看。仔细一瞧,发现这个表的大小竟然超过了3G。主管随即指示小王打开相应的表数据检查,发现其中存储了用户的权限信息…...
毫米波雷达原理(含代码)(含ARS548 4D毫米波雷达数据demo和可视化视频)
毫米波雷达原理 1. 传统毫米波雷达1.1 雷达工作原理1.2 单目标距离估计1.3 单目标速度估计1.4 单目标角度估计1.5 多目标距离估计1.6 多目标速度估计1.7多目标角度估计1.7 总结 3. FMCW雷达数据处理算法4. 毫米波雷达的目标解析(含python代码)5. ARS548 4D毫米波雷达数据demo(含…...

3.1 Gateway之路由请求和转发
1.依赖坐标 <!--网关--><dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-gateway</artifactId></dependency><!--服务注册和发现--><dependency><groupId>com.alibab…...
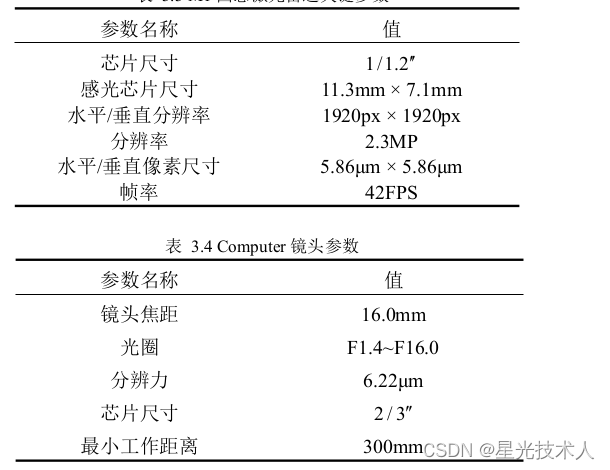
人脸识别开源算法库和开源数据库
目录 1. 人脸识别开源算法库 1.1 OpenCV人脸识别模块 1.2 Dlib人脸识别模块 1.3 SeetaFace6 1.4 DeepFace 1.5 InsightFace 2. 人脸识别开源数据库 2.1 CelebA 2.2 LFW 2.3 MegaFace 2.4 Glint360K 2.5 WebFace260M 人脸识别 (Face Recognition) 是一种基于人的面部…...
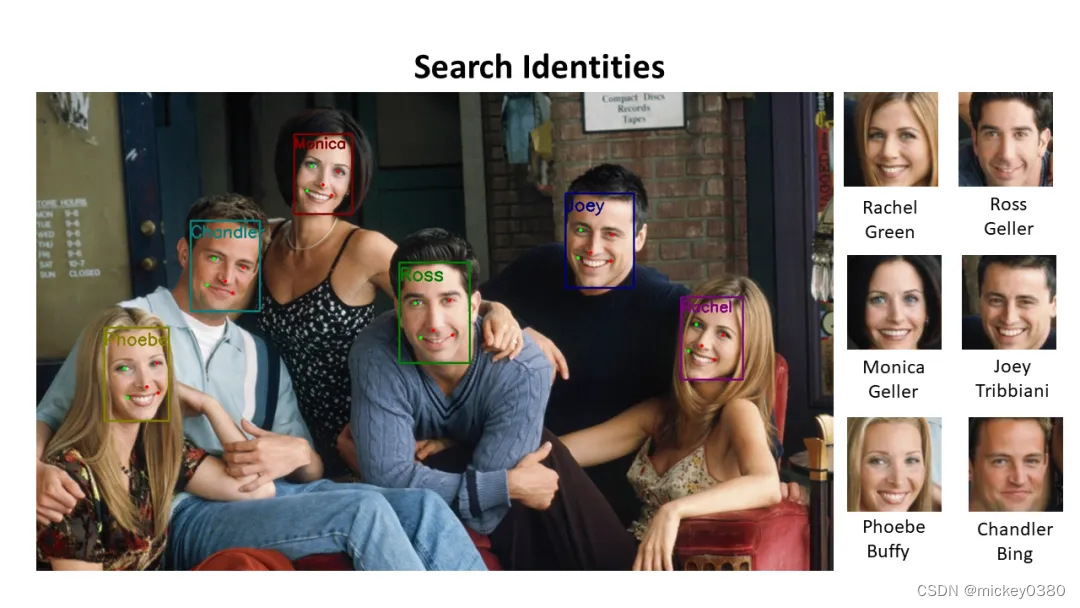
Excel 中用于在一个范围中查找特定的值,并返回同一行中指定列的值 顺序不一样 可以处理吗
一、需求 Excel 中,在一列(某范围内)查找另一列特定的值,并返回同一行中另一指定列的值, 查找列和返回列的顺序不一样 二、 实现 1、下面是一个使用 INDEX 和 MATCH 函数的例子: 假设你有以下数据&…...

MySql-日期分组
一、分别统计各时间各类型数据条数 数据库的 request_time字段 数据类型:timestamp 默认值:CURRENT_TIMESTAMP 例子: 2024-01-26 08:25:48 原数据: 1、将数据按照日期(年月日)形式输出 按照request_…...

有哪些方法可以在运行时动态生成一个Java类?
使用 Java 反射 API🚩: Java 的反射 API 允许在运行时查询和操作类和对象。虽然反射 API 本身不直接提供生成新类的功能,但可以用于动态调用构造函数、方法和访问字段,这在某些情况下可以作为动态生成类的一部分。 字节码操作库&…...

JAVA两个线程交替打印实现
方案1 Semaphore 机制 通过信息号机制来 协调两个线程,一个线程打印后,给另一个线程释放一个信号量 Semaphore semaphorea new Semaphore(1);Semaphore semaphoreb new Semaphore(0);Thread threada new Thread(new Runnable() {Overridepublic void…...

【C语言】学习C语言
C语言简介 C语言是一门十分流行的编程语言,由美国贝尔实验室的 Dennis Ritchie 在 20 世纪 70 年代开发。 C语言具有高效、可移植、灵活、简单等特点,被广泛应用于操作系统、编译器、数据库、图形界面、嵌入式系统、网络通信、游戏等领域。 本文将带你…...

C 深入指针(2)
目录 1 野指针 1.1 成因 1.2 如何规避野指针 2 assert 断言 2.1 用法 2.2 assert 的优点 2.1 assert 的缺点 3 小注解 3.1 Debug 和 Release 1 野指针 【概念】: 野指针就是指针指向的位置是不可知的(随机的、不正确的、没有明确限制的&#…...
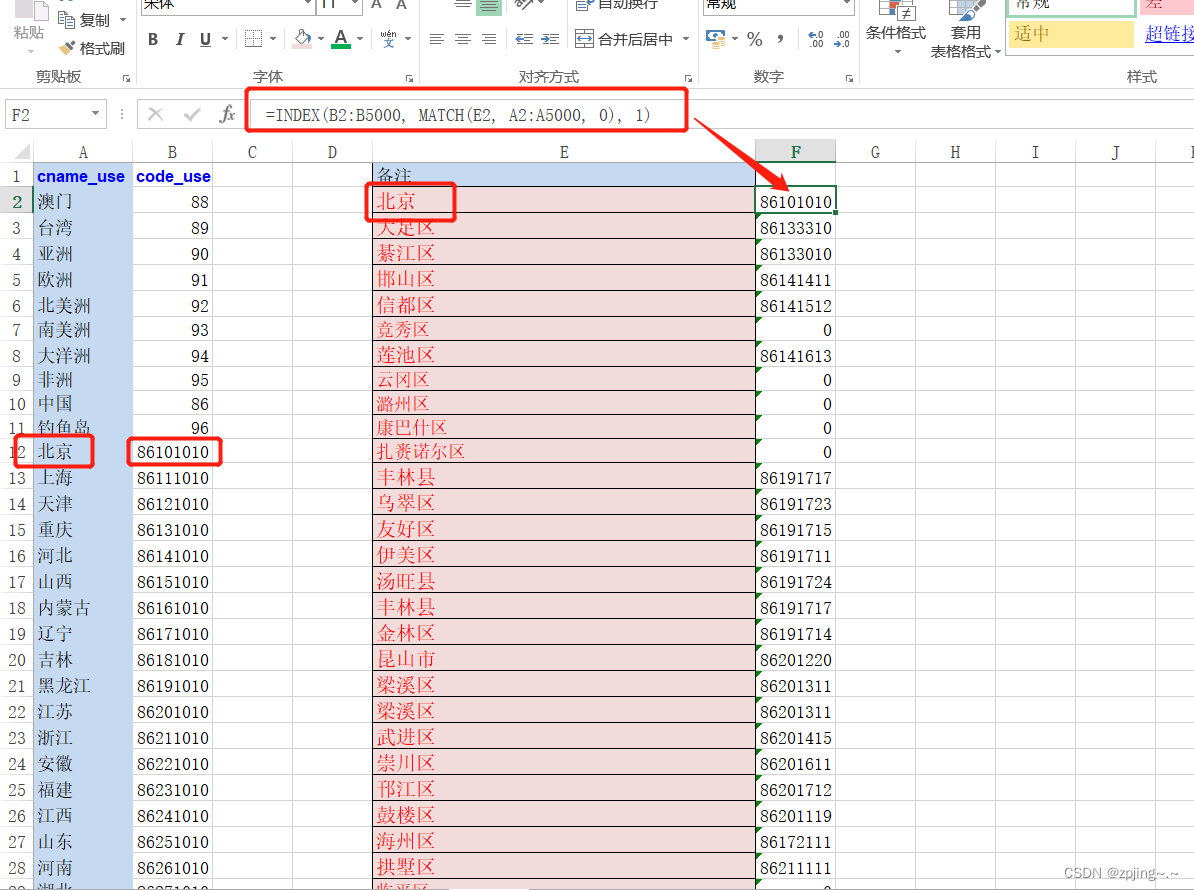
FileLink跨网文件交换,推动企业高效协作|半导体行业解决方案
随着信息技术的迅猛发展,全球信息产业已经迎来了前所未有的繁荣与变革。在这场科技革命中,半导体作为信息产业的基础与核心,其重要性日益凸显,半导体的应用场景和市场需求将进一步扩大。 然而,在这一繁荣的背后&#x…...

产品经理必懂的博弈论:如何用帕累托最优和纳什均衡设计用户激励与平台规则
产品经理必懂的博弈论:如何用帕累托最优和纳什均衡设计用户激励与平台规则 在互联网产品的世界里,每天都有无数场看不见的博弈正在上演——司机与乘客的匹配、商家与消费者的互动、创作者与平台的共生。这些看似复杂的商业行为背后,往往遵循着…...

CSDN博客批量下载器重构实战:MVC架构下的智能爬虫解决方案
CSDN博客批量下载器重构实战:MVC架构下的智能爬虫解决方案 【免费下载链接】CSDNBlogDownloader 项目地址: https://gitcode.com/gh_mirrors/cs/CSDNBlogDownloader 在技术博客内容日益成为开发者知识体系核心的时代,网络内容的不稳定性与知识管…...

如何为FF14国际服实现完整中文汉化:FFXIVChnTextPatch实战指南
如何为FF14国际服实现完整中文汉化:FFXIVChnTextPatch实战指南 【免费下载链接】FFXIVChnTextPatch 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIVChnTextPatch 还在为《最终幻想14》国际服的英文界面而烦恼吗?FFXIVChnTextPatch项目为你提…...

扛住十万并发的“冷面保安”:一文扒透限流的四大经典算法与代码实战
在高并发架构中,如果说缓存和 MQ 是替服务器扛伤害的“防弹衣”,那么限流(Rate Limiting)就是守在系统大门外的“冷面保安”。他的核心逻辑极其冷酷:不管外面排队的人有多急,只要超过了系统的最大接待能力&…...

高效掌握Simscape Electrical:BLDC电机控制器设计的5大关键技术实战
高效掌握Simscape Electrical:BLDC电机控制器设计的5大关键技术实战 【免费下载链接】Design-motor-controllers-with-Simscape-Electrical This repository contains MATLAB and Simulink files used in the "How to design motor controllers using Simscape…...

别再只盯着业务代码了!SpringBoot应用层安全之Tomcat连接管理实战
SpringBoot应用层安全实战:Tomcat连接管理的三驾马车 当我们在讨论SpringBoot应用安全时,业务代码的漏洞修复往往占据了大部分注意力。然而,真正的安全防线远不止于此——应用层基础设施的配置与优化同样至关重要。想象一下,你的应…...

OBS实时字幕插件实战指南:专业直播字幕解决方案
OBS实时字幕插件实战指南:专业直播字幕解决方案 【免费下载链接】OBS-captions-plugin Closed Captioning OBS plugin using Google Speech Recognition 项目地址: https://gitcode.com/gh_mirrors/ob/OBS-captions-plugin 在当今的直播和内容创作领域&#…...

3步解决Windows热键冲突:Hotkey Detective强力侦测工具指南
3步解决Windows热键冲突:Hotkey Detective强力侦测工具指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是…...

【亲测免费】 快递单PaddleOCR数据集:助力OCR技术研究与应用
快递单PaddleOCR数据集:助力OCR技术研究与应用 【下载地址】快递单PaddleOCR数据集 本仓库提供了一个专门用于PaddleOCR模型训练和测试的快递单数据集。该数据集包含了大量经过标注的快递单图像,适用于OCR技术的研究和开发 项目地址: https://gitcode.…...

软件测试的“隐形赛道”:性能测试如何年入50w
一、性能测试:软件测试领域的“隐形黄金赛道”在软件测试的广阔版图中,性能测试长期处于“隐形”状态,却暗藏着年入50w的职业密码。相较于广为人知的功能测试,性能测试聚焦于系统在高并发、大数据量、复杂场景下的表现,…...