【2】STM32·FreeRTOS·任务创建和删除
目录
一、任务创建和删除的API函数
1.1、动态创建任务函数
1.2、静态创建任务函数
1.3、任务删除函数
二、任务创建和删除(动态方法)
三、任务创建和删除(静态方法)
一、任务创建和删除的API函数
任务的创建和删除本质就是调用 FreeRTOS 的 API 函数
| API函数 | 描述 |
| xTaskCreate() | 动态方式创建任务 |
| xTaskCreateStatic() | 静态方式创建任务 |
| xTaskDelete() | 删除任务 |
动态创建任务:任务的任务控制块以及任务的栈空间所需的内存,均由 FreeRTOS 从 FreeRTOS 管理的堆中分配
静态创建任务:任务的任务控制块以及任务的栈空间所需的内存,需用户分配提供
1.1、动态创建任务函数
BaseType_t xTaskCreate
(TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */const char * const pcName, /* 任务名字,最大长度configMAX_TASK_NAME_LEN */const configSTACK_DEPTH_TYPE usStackDepth, /* 任务堆栈大小,注意字为单位 */void * const pvParameters, /* 传递给任务函数的参数 */UBaseType_t uxPriority, /* 任务优先级,范围:0 ~ configMAX_PRIORITIES - 1 */TaskHandle_t * const pxCreatedTask /* 任务句柄,就是任务的任务控制块 */
)| 返回值 | 描述 |
| pdPASS | 任务创建成功 |
| errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY | 任务创建失败 |
实现动态创建任务流程
1、将宏 configSUPPORT_DYNAMIC_ALLOCATION 配置为 1
2、定义函数入口参数
3、编写任务函数
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行
动态创建任务函数内部实现
1、申请堆栈内存&任务控制块内存
2、TCB结构体成员赋值
3、添加新任务到就绪列表中
任务控制块结构体成员介绍
typedef struct tskTaskControlBlock
{volatile StackType_t *pxTopOfStack; /* 任务栈栈顶,必须为TCB的第一个成员 */ListItem_t xStateListItem; /* 任务状态列表项 */ListItem_t xEventListItem; /* 任务事件列表项 */UBaseType_t uxPriority; /* 任务优先级,数值越大,优先级越大 */StackType_t *pxStack; /* 任务栈起始地址 */char pcTaskName[configMAX_TASK_NAME_LEN]; /* 任务名字 */...
} tskTCB;任务栈栈顶,在任务切换时的任务上下文保存、任务恢复息息相关
每个任务都有属于自己的任务控制块,类似身份证
1.2、静态创建任务函数
TaskHandle_t xTaskCreateStatic
(TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */const char * const pcName, /* 任务函数名 */const uint32_t ulStackDepth, /* 任务堆栈大小,注意字为单位 */void * const pvParameters, /* 传递给任务函数的参数 */UBaseType_t uxPriority, /* 任务优先级 */StackType_t * const puxStackBuffer, /* 任务堆栈,一般为数组,由用户分配 */StaticTask_t * const pxTaskBuffer /* 任务控制块指针,由用户分配 */
)| 返回值 | 描述 |
| NULL | 用户没有提供相应的内存,任务创建失败 |
| 其他值 | 任务句柄,任务创建成功 |
静态创建任务使用流程
1、将宏 configSUPPORT_STATIC_ALLOCATION 配置为 1
2、定义空闲任务&定时器任务的任务堆栈及TCB
3、实现两个接口函数:vApplicationGetIdleTaskMemory()、vApplicationGetTimerTaskMemory()
4、定义函数入口参数
5、编写任务函数
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行
静态创建任务函数内部实现
1、TCB结构体成员赋值
2、添加新任务到就绪列表中
1.3、任务删除函数
void vTaskDelete(TaskHandle_t xTaskToDelete);| 形参 | 描述 |
| xTaskToDelete | 待删除任务的任务句柄 |
用于删除已被创建的任务,被删除的任务将从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除
1、当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)
2、当要删除任务自身时,空闲任务会负责释放被删除任务中由系统分配的内存(动态创建任务),但是由用户在任务删除前申请的内存(静态创建任务),则需要由用户在任务被删除前提前释放,否则将导致内存泄漏
删除任务流程
1、使用删除任务函数,需将宏 INCLUDE_vTaskDelete 配置为 1
2、入口参数输入需要删除的任务句柄(NULL代表删除本身)
删除任务函数内部实现
1、获取所要删除任务的控制块:通过传入的任务句柄,判断所需要删除哪个任务,NULL代表删除自身
2、将被删除任务,移除所在列表:将该任务在所在列表中移除,包括:就绪、阻塞、挂起、事件等列表
3、判断所需要删除的任务:删除任务自身,需先添加到等待删除列表,内存释放将在空闲任务执行。删除其他任务,释放内存,任务数量
4、更新下个任务的阻塞时间:更新下一个任务的阻塞超时时间,以防被删除的任务就是下一个阻塞超时的任务
二、任务创建和删除(动态方法)
将设计四个任务:start_task、task1、task2、task3
四个任务的功能如下
start_task:用来创建其他三个任务
task1:实现 LED0 每 500ms 闪烁一次
task2:实现 LED0 每 500ms 闪烁一次
task3:判断按键 KEY0 是否按下,按下则删掉 task1
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
#include "freertos_demo.h"int main(void)
{HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */delay_init(168); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */key_init(); /* 初始化按键 */freertos_demo();
}
freertos_demo.c
#include "freertos_demo.h"/******************************************************************************************************/
/*FreeRTOS配置*//* START_TASK 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define START_TASK_PRIO 1 /* 任务优先级 */
#define START_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t StartTask_Handler; /* 任务句柄 */
void start_task(void *pvParameters); /* 任务函数 *//* TASK1 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK1_PRIO 2 /* 任务优先级 */
#define TASK1_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task1Task_Handler; /* 任务句柄 */
void task1(void *pvParameters); /* 任务函数 *//* TASK2 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK2_PRIO 3 /* 任务优先级 */
#define TASK2_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task2Task_Handler; /* 任务句柄 */
void task2(void *pvParameters); /* 任务函数 *//* TASK3 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK3_PRIO 4 /* 任务优先级 */
#define TASK3_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task3Task_Handler; /* 任务句柄 */
void task3(void *pvParameters); /* 任务函数 *//******************************************************************************************************//* LCD刷屏时使用的颜色 */
uint16_t lcd_discolor[11] = {WHITE, BLACK, BLUE, RED,MAGENTA, GREEN, CYAN, YELLOW,BROWN, BRRED, GRAY};/* FreeRTOS例程入口函数 */
void freertos_demo(void)
{lcd_show_string(10, 10, 220, 32, 32, "STM32", RED);lcd_show_string(10, 47, 220, 24, 24, "Task Create & Del", RED);lcd_show_string(10, 76, 220, 16, 16, "ATOM@ALIENTEK", RED);lcd_draw_rectangle(5, 110, 115, 314, BLACK);lcd_draw_rectangle(125, 110, 234, 314, BLACK);lcd_draw_line(5, 130, 115, 130, BLACK);lcd_draw_line(125, 130, 234, 130, BLACK);lcd_show_string(15, 111, 110, 16, 16, "Task1: 000", BLUE);lcd_show_string(135, 111, 110, 16, 16, "Task2: 000", BLUE);xTaskCreate((TaskFunction_t)start_task, /* 任务函数 */(const char *)"start_task", /* 任务名称 */(uint16_t)START_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传入给任务函数的参数 */(UBaseType_t)START_TASK_PRIO, /* 任务优先级 */(TaskHandle_t *)&StartTask_Handler); /* 任务句柄 */vTaskStartScheduler();
}/* start_task */
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); /* 进入临界区 *//* 创建任务1 */xTaskCreate((TaskFunction_t)task1, /* 任务函数 */(const char *)"task1", /* 任务名称 */(uint16_t)TASK1_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传入给任务函数的参数 */(UBaseType_t)TASK1_PRIO, /* 任务优先级 */(TaskHandle_t *)&Task1Task_Handler); /* 任务句柄 *//* 创建任务2 */xTaskCreate((TaskFunction_t)task2, /* 任务函数 */(const char *)"task2", /* 任务名称 */(uint16_t)TASK2_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传入给任务函数的参数 */(UBaseType_t)TASK2_PRIO, /* 任务优先级 */(TaskHandle_t *)&Task2Task_Handler); /* 任务句柄 *//* 创建任务3 */xTaskCreate((TaskFunction_t)task3, /* 任务函数 */(const char *)"task3", /* 任务名称 */(uint16_t)TASK3_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传入给任务函数的参数 */(UBaseType_t)TASK3_PRIO, /* 任务优先级 */(TaskHandle_t *)&Task3Task_Handler); /* 任务句柄 */vTaskDelete(StartTask_Handler); /* 删除开始任务 */taskEXIT_CRITICAL(); /* 退出临界区 */
}/* task1 */
void task1(void *pvParameters)
{uint32_t task1_num = 0;while (1){lcd_fill(6, 131, 114, 313, lcd_discolor[++task1_num % 11]);lcd_show_xnum(71, 111, task1_num, 3, 16, 0x80, BLUE);LED0_TOGGLE();vTaskDelay(500);}
}/* task2 */
void task2(void *pvParameters)
{uint32_t task2_num = 0;while (1){lcd_fill(126, 131, 233, 313, lcd_discolor[11 - (++task2_num % 11)]);lcd_show_xnum(191, 111, task2_num, 3, 16, 0x80, BLUE);LED1_TOGGLE();vTaskDelay(500);}
}/* task3 */
void task3(void *pvParameters)
{uint8_t key = 0;while (1){key = key_scan(0);switch (key){case KEY0_PRES: /* 删除任务1 */{if (Task1Task_Handler != NULL){vTaskDelete(Task1Task_Handler);Task1Task_Handler = NULL;}break;}case KEY1_PRES: /* 删除任务2 */{if (Task2Task_Handler != NULL){vTaskDelete(Task2Task_Handler);Task2Task_Handler = NULL;}break;}default:{break;}}vTaskDelay(10);}
}
freertos_demo.h
#ifndef __FREERTOS_DEMO_H
#define __FREERTOS_DEMO_H#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/LCD/lcd.h"
#include "FreeRTOS.h"
#include "task.h"void freertos_demo(void);#endif
三、任务创建和删除(静态方法)
将设计四个任务:start_task、task1、task2、task3
四个任务的功能如下
start_task:用来创建其他三个任务
task1:实现 LED0 每 500ms 闪烁一次
task2:实现 LED0 每 500ms 闪烁一次
task3:判断按键 KEY0 是否按下,按下则删掉 task1
main.c、freertos_demo.h 和动态创建一样
freertos_demo.c
#include "freertos_demo.h"/******************************************************************************************************/
/*FreeRTOS配置*/static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE]; /* 空闲任务任务堆栈 */
static StaticTask_t IdleTaskTCB; /* 空闲任务控制块 */
static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH]; /* 定时器服务任务堆栈 */
static StaticTask_t TimerTaskTCB; /* 定时器服务任务控制块 *//*** @brief 获取空闲任务地任务堆栈和任务控制块内存,因为本例程使用的静态内存,因此空闲任务的任务堆栈和任务控制块的内存就应该有用户来提供,FreeRTOS提供了接口函数vApplicationGetIdleTaskMemory()实现此函数即可。* @param ppxIdleTaskTCBBuffer:任务控制块内存ppxIdleTaskStackBuffer:任务堆栈内存pulIdleTaskStackSize:任务堆栈大小* @retval 无*/
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,StackType_t **ppxIdleTaskStackBuffer,uint32_t *pulIdleTaskStackSize)
{*ppxIdleTaskTCBBuffer = &IdleTaskTCB;*ppxIdleTaskStackBuffer = IdleTaskStack;*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}/*** @brief 获取定时器服务任务的任务堆栈和任务控制块内存* @param ppxTimerTaskTCBBuffer:任务控制块内存ppxTimerTaskStackBuffer:任务堆栈内存pulTimerTaskStackSize:任务堆栈大小* @retval 无*/
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,StackType_t **ppxTimerTaskStackBuffer,uint32_t *pulTimerTaskStackSize)
{*ppxTimerTaskTCBBuffer = &TimerTaskTCB;*ppxTimerTaskStackBuffer = TimerTaskStack;*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}/* START_TASK 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define START_TASK_PRIO 1 /* 任务优先级 */
#define START_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t StartTaskStack[START_STK_SIZE]; /* 任务堆栈 */
StaticTask_t StartTaskTCB; /* 任务控制块 */
TaskHandle_t StartTask_Handler; /* 任务句柄 */
void start_task(void *pvParameters); /* 任务函数 *//* TASK1 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK1_PRIO 2 /* 任务优先级 */
#define TASK1_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task1TaskStack[TASK1_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task1TaskTCB; /* 任务控制块 */
TaskHandle_t Task1Task_Handler; /* 任务句柄 */
void task1(void *pvParameters); /* 任务函数 *//* TASK2 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK2_PRIO 3 /* 任务优先级 */
#define TASK2_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task2TaskStack[TASK2_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task2TaskTCB; /* 任务控制块 */
TaskHandle_t Task2Task_Handler; /* 任务句柄 */
void task2(void *pvParameters); /* 任务函数 *//* TASK3 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK3_PRIO 4 /* 任务优先级 */
#define TASK3_STK_SIZE 128 /* 任务堆栈大小 */
StackType_t Task3TaskStack[TASK3_STK_SIZE]; /* 任务堆栈 */
StaticTask_t Task3TaskTCB; /* 任务控制块 */
TaskHandle_t Task3Task_Handler; /* 任务句柄 */
void task3(void *pvParameters); /* 任务函数 *//******************************************************************************************************//* LCD刷屏时使用的颜色 */
uint16_t lcd_discolor[11] = {WHITE, BLACK, BLUE, RED,MAGENTA, GREEN, CYAN, YELLOW,BROWN, BRRED, GRAY};/* FreeRTOS例程入口函数 */
void freertos_demo(void)
{lcd_show_string(10, 10, 220, 32, 32, "STM32", RED);lcd_show_string(10, 47, 220, 24, 24, "Task Create & Del", RED);lcd_show_string(10, 76, 220, 16, 16, "ATOM@ALIENTEK", RED);lcd_draw_rectangle(5, 110, 115, 314, BLACK);lcd_draw_rectangle(125, 110, 234, 314, BLACK);lcd_draw_line(5, 130, 115, 130, BLACK);lcd_draw_line(125, 130, 234, 130, BLACK);lcd_show_string(15, 111, 110, 16, 16, "Task1: 000", BLUE);lcd_show_string(135, 111, 110, 16, 16, "Task2: 000", BLUE);StartTask_Handler = xTaskCreateStatic((TaskFunction_t)start_task, /* 任务函数 */(const char *)"start_task", /* 任务名称 */(uint32_t)START_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传递给任务函数的参数 */(UBaseType_t)START_TASK_PRIO, /* 任务优先级 */(StackType_t *)StartTaskStack, /* 任务堆栈 */(StaticTask_t *)&StartTaskTCB); /* 任务控制块 */vTaskStartScheduler();
}/* start_task */
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); /* 进入临界区 *//* 创建任务1 */Task1Task_Handler = xTaskCreateStatic((TaskFunction_t)task1, /* 任务函数 */(const char *)"task1", /* 任务名称 */(uint32_t)TASK1_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传递给任务函数的参数 */(UBaseType_t)TASK1_PRIO, /* 任务优先级 */(StackType_t *)Task1TaskStack, /* 任务堆栈 */(StaticTask_t *)&Task1TaskTCB); /* 任务控制块 *//* 创建任务2 */Task2Task_Handler = xTaskCreateStatic((TaskFunction_t)task2, /* 任务函数 */(const char *)"task2", /* 任务名称 */(uint32_t)TASK2_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传递给任务函数的参数 */(UBaseType_t)TASK2_PRIO, /* 任务优先级 */(StackType_t *)Task2TaskStack, /* 任务堆栈 */(StaticTask_t *)&Task2TaskTCB); /* 任务控制块 *//* 创建任务3 */Task3Task_Handler = xTaskCreateStatic((TaskFunction_t)task3, /* 任务函数 */(const char *)"task3", /* 任务名称 */(uint32_t)TASK3_STK_SIZE, /* 任务堆栈大小 */(void *)NULL, /* 传递给任务函数的参数 */(UBaseType_t)TASK3_PRIO, /* 任务优先级 */(StackType_t *)Task3TaskStack, /* 任务堆栈 */(StaticTask_t *)&Task3TaskTCB); /* 任务控制块 */vTaskDelete(StartTask_Handler); /* 删除开始任务 */taskEXIT_CRITICAL(); /* 退出临界区 */
}/* task1 */
void task1(void *pvParameters)
{uint32_t task1_num = 0;while (1){lcd_fill(6, 131, 114, 313, lcd_discolor[++task1_num % 11]);lcd_show_xnum(71, 111, task1_num, 3, 16, 0x80, BLUE);LED0_TOGGLE();vTaskDelay(500);}
}/* task2 */
void task2(void *pvParameters)
{uint32_t task2_num = 0;while (1){lcd_fill(126, 131, 233, 313, lcd_discolor[11 - (++task2_num % 11)]);lcd_show_xnum(191, 111, task2_num, 3, 16, 0x80, BLUE);LED1_TOGGLE();vTaskDelay(500);}
}/* task3 */
void task3(void *pvParameters)
{uint8_t key = 0;while (1){key = key_scan(0);switch (key){case KEY0_PRES: /* 删除任务1 */{if (Task1Task_Handler != NULL){vTaskDelete(Task1Task_Handler);Task1Task_Handler = NULL;}break;}case KEY1_PRES: /* 删除任务2 */{if (Task2Task_Handler != NULL){vTaskDelete(Task2Task_Handler);Task2Task_Handler = NULL;}break;}default:{break;}}vTaskDelay(10);}
}
相关文章:

【2】STM32·FreeRTOS·任务创建和删除
目录 一、任务创建和删除的API函数 1.1、动态创建任务函数 1.2、静态创建任务函数 1.3、任务删除函数 二、任务创建和删除(动态方法) 三、任务创建和删除(静态方法) 一、任务创建和删除的API函数 任务的创建和删除本质就是…...
日志审计系统在提高网络安全方面具有哪些重要的作用
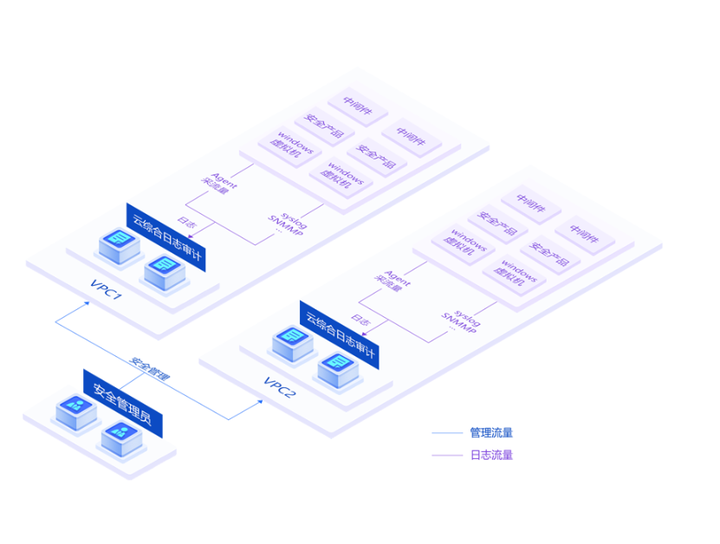
随着信息技术的飞速发展,我们正处于一个高度互联、数据驱动的网络时代。在这个时代,日志审计系统作为网络安全和信息管理的重要工具,发挥着至关重要的作用。下面德迅云安全就详细介绍下关于日志审计系统在当今网络时代的重要性。 一、什么是日…...
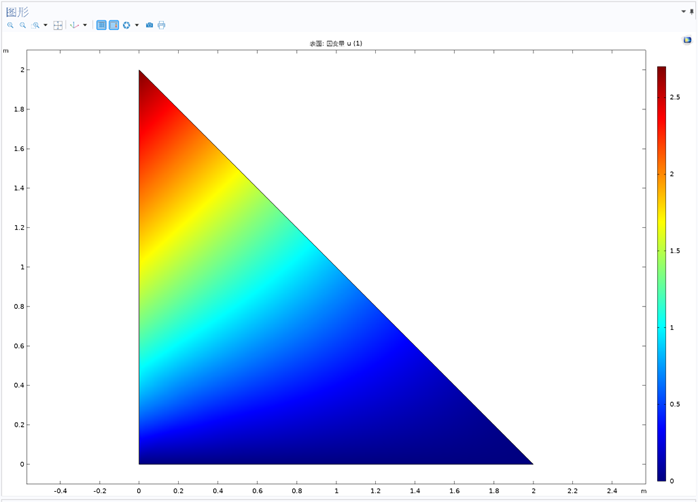
二维泊松方程(Neumann+Direchliet边界条件)有限元Matlab编程求解|程序源码+说明文本
专栏导读 作者简介:工学博士,高级工程师,专注于工业软件算法研究本文已收录于专栏:《有限元编程从入门到精通》本专栏旨在提供 1.以案例的形式讲解各类有限元问题的程序实现,并提供所有案例完整源码;2.单元…...
13_Scala面向对象编程_伴生对象
文章目录 1.伴生对象1.1 scala的一个性质,scala文件中的类都是公共的;1.2 scala使用object关键字也可以声明对象; 3.关于伴生对象和类4.权限修饰符,scala仅有private;5.伴生对象可以访问伴生类中的私有属性;6.案例7.伴…...

RS485空调系统到BACnet江森楼宇系统的高效整合攻略
智慧城市的每一栋建筑都在追求更高的能效与更佳的居住体验,而这一切的实现离不开强大且灵活的楼宇自动化系统。其中,协议转换网关作为连接不同设备的纽带,扮演着至关重要的角色。本文将以一个典型的商业综合体为例,揭秘BACnet协议…...

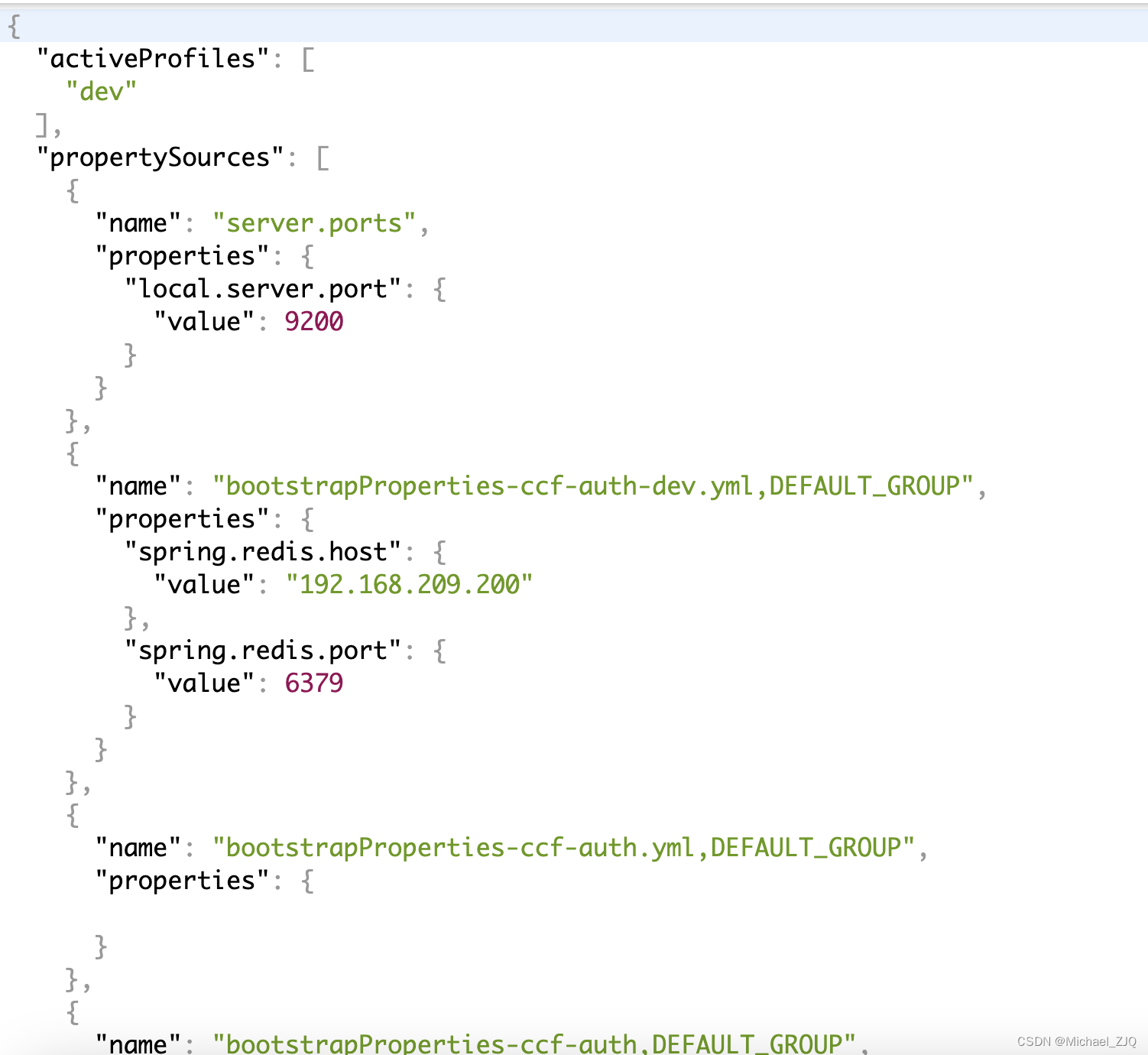
Springboot集成Redis操作缓存-06
Redis简介 Redis(Remote Dictionary Server),即远程字典服务,是一个开源的、使用ANSI C语言编写的、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。 功能特点 数据结构丰富&#…...

【WPF】聊聊WPF中INotifyPropertyChanged [TOC]
聊聊WPF中INotifyPropertyChanged 文章目录 聊聊WPF中INotifyPropertyChanged一、INotifyPropertyChanged接口二、DataContext2.1/DataContext作用2.2/DataContext特性2.3/DataContext实例 三、INotifyPropertyChanged接口的几种实现方式3.1/简单INotifyPropertyChanged绑定3.2…...
SpringBoot Actuator未授权访问漏洞的解决方法
1. 介绍 Spring Boot Actuator 是一个用于监控和管理 Spring Boot 应用程序的功能模块。它提供了一系列生产就绪的功能,帮助你了解应用程序的运行状况,以及在运行时对应用程序进行调整。Actuator 使用了 Spring MVC 来暴露各种 HTTP 或 JMX 端点&#x…...

AI大模型探索之路-训练篇18:大语言模型预训练-微调技术之Prompt Tuning
系列篇章💥 AI大模型探索之路-训练篇1:大语言模型微调基础认知 AI大模型探索之路-训练篇2:大语言模型预训练基础认知 AI大模型探索之路-训练篇3:大语言模型全景解读 AI大模型探索之路-训练篇4:大语言模型训练数据集概…...
Ollamallama
Olllama 直接下载ollama程序,安装后可在cmd里直接运行大模型; llama 3 meta 开源的最新llama大模型; 下载运行 1 ollama ollama run llama3 2 github 下载仓库,需要linux环境,windows可使用wsl; 接…...
苹果Mac用户下载VS Code(Universal、Intel Chip、Apple Silicon)哪个版本?
苹果macOS用户既可以下载通用版(Universal),软件将自动检测用户的处理器并进行适配。 也可以根据型号下载对应CPU的版本: 使用Intel CPU的Mac电脑可下载Intel Chip版本; 使用苹果自研M系列CPU的Mac电脑下载Apple Si…...
安装CGAL(非root))
Linux(Ubuntu)安装CGAL(非root)
一、安装boost 下载地址:Boost C Libraries - Browse /boost at SourceForge.net 我安装的是1.77.0的版本 ./bootstrap.sh --prefix/usr/local/boost ./b2 ./b2 install 配置环境变量 vim ~/.bashrcexport BOOST_INCLUDE/usr/local/boost/include export BO…...

hadoop学习---基于Hive的教育平台数据仓库分析案例(三)
衔接第一部分,第一部分请点击:基于Hive的教育平台数据仓库分析案例(一) 衔接第二部分,第二部分请点击:基于Hive的教育平台数据仓库分析案例(二) 学生出勤模块(全量分析):…...

RAFT:引领 Llama 在 RAG 中发展
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

上海亚商投顾:沪指缩量调整 合成生物概念股持续爆发
上海亚商投顾前言:无惧大盘涨跌,解密龙虎榜资金,跟踪一线游资和机构资金动向,识别短期热点和强势个股。 一.市场情绪 沪指昨日缩量震荡调整,深成指、创业板指均跌超1%。细胞免疫治疗概念股大涨,冠昊生物、…...

Maven+Junit5 + Allure +Jenkins 搭建 UI 自动化测试实战
文章目录 效果展示Junit 5Junit 5 介绍Junit 5 与 Junit 4 对比PageFactory 模式编写自动化代码公共方法提取测试用例参数化Jenkins 搭建及配置参数化执行生成 Allure 报告Maven 常用命令介绍POM 文件效果展示 本 chat 介绍 UI 自动化测试框架的搭建: 运用 page factory 模式…...
docker学习笔记(三)搭建NFS服务实验
目录 什么是NFS 简单架构编辑 一.搭建nfs服务器 二.新建共享目录和网页文件 三.设置共享目录 四:创建使用nfs共享目录的卷 五:创建容器使用nfs-web-1卷 六:测试访问 七:是否同步测试 什么是NFS NFS 服务器:ne…...

super关键字
super关键字 在Java中,super是一个关键字,它用于引用当前对象的父类。在继承的关系中,子类可以通过super关键字来调用父类的构造方法、成员方法和成员变量。 super关键字的主要用途 调用父类的构造方法: 在子类的构造方法中&…...
)
【经典算法】LeetCode 200. 岛屿数量(Java/C/Python3/Go实现含注释说明,中等)
目录 题目描述思路及实现方式一:深度优先搜索(DFS)思路代码实现Java版本C语言版本Python3版本Golang版本 复杂度分析 方式二: 使用广度优先搜索(BFS)思路代码实现Java实现C实现Python3实现Go实现 总结相似题…...

Hive SQL-DQL-Select查询语句用法详解
HQL Select用法详解 1.基础语法 (1)select_exp (2)ALL、DISTINCT (3)WHERE (4)分区查询、分区裁剪 (5)GROUP BY (6)HAVING ࿰…...

OpenUsage:一站式AI订阅用量监控工具的设计与实战
1. 项目概述:为什么我们需要一个AI订阅用量监控器? 如果你和我一样,是个重度依赖AI编程工具的开发者,那你肯定对下面这个场景不陌生:为了搞清楚自己这个月还剩多少Claude的会话额度,得先打开浏览器&#x…...

LTE测试工程实践:从可视化到故障排查的完整指南
1. LTE测试:从模糊概念到清晰视图的工程实践在无线通信领域,尤其是LTE(Long Term Evolution,长期演进)技术从研发到商用的全周期中,“测试”二字承载的重量远超外行想象。它绝非简单的“通断”检查…...

告别Anchor和NMS!用DETR在NWPU遥感数据集上跑出88%AP的保姆级教程
告别Anchor和NMS!用DETR在NWPU遥感数据集上跑出88%AP的保姆级教程 遥感图像目标检测一直是计算机视觉领域的重要研究方向,但传统方法如Faster R-CNN和YOLO系列在处理遥感目标时存在诸多限制。本文将带你深入了解DETR(Detection with Transformers)这一革…...

Android Studio 在 MacOS 上的完整安装与使用指南
Android Studio 在 MacOS 上的完整安装与使用指南摘要一、Android Studio 简介二、下载与安装1. 下载 Android Studio2. 安装前的依赖准备3. 安装步骤三、基础使用指南1. 创建第一个项目2. 运行应用3. 核心功能四、进阶功能配置1. 配置 SDK 和工具2. 自定义主题与插件3. Gradle…...

C语言中的strchr函数
strchr是string.h库中的函数,它的形式为: char * strchr (char * str, int character );功能: 返回一个指针,指向字符在 C 字符串 str 中第一次出现的位置。C 字符串末尾的空字符 \0 被视为字符串的一部分。因此,你也可…...

Windows热键冲突终极解决方案:Hotkey Detective一键精准定位
Windows热键冲突终极解决方案:Hotkey Detective一键精准定位 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你…...

从协同过滤到深度学习:Spark机器学习实战三部曲
1. 协同过滤:Spark推荐系统的基石 推荐系统是机器学习最接地气的应用场景之一。我在电商平台做算法优化时,发现协同过滤(CF)始终是新手最容易上手的推荐算法。Spark MLlib提供了两种经典实现:基于物品的协同过滤(Item CF)和基于用户的协同过滤…...

【车辆控制】模糊偏航的扭矩矢量与主动转向控制系统【含Matlab源码 15444期】含报告
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab领域博客之家💞&…...

openclaw gateway网关运行详解
📘 Gateway 网关运行手册 — 关键内容与操作流程 1) Gateway 是什么 Gateway 网关服务 是一款长期运行的进程,用于处理连接控制、事件平面,与底层 Baileys / Telegram 等协议对接,为客户端提供 RPC/HTTP 接口。它自身启动后持续运…...

2026年京东云环境OpenClaw / Hermes Agent 配置 Token Plan部署怎么搞?详细解读
2026年京东云环境OpenClaw / Hermes Agent 配置 Token Plan部署怎么搞?详细解读。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼T…...