【LLM 论文】Step-Back Prompting:先解决更高层次的问题来提高 LLM 推理能力
论文:Take a Step Back: Evoking Reasoning via Abstraction in Large Language Models
⭐⭐⭐⭐
Google DeepMind, ICLR 2024, arXiv:2310.06117
论文速读
该论文受到的启发是:人类再解决一个包含很多细节的具体问题时,先站在更高的层次上解决一些更加抽象的问题,可以拓展一个更宽阔的上下文环境,从而辅助解决这个具体的问题。
反应到 LLM 中,就是当问 LLM 一个具体的物理题目时,先让 LLM 解决一个更加高层次的抽象问题 这个问题背后用得到物理定律或法则是什么? ,然后再让 LLM 去解决那个包含了很多细节的具体的物理题目,可能效果就会更好,准确率更高。
因此,本论文提出了 Step-Back 的 prompting 思路,示例如下:
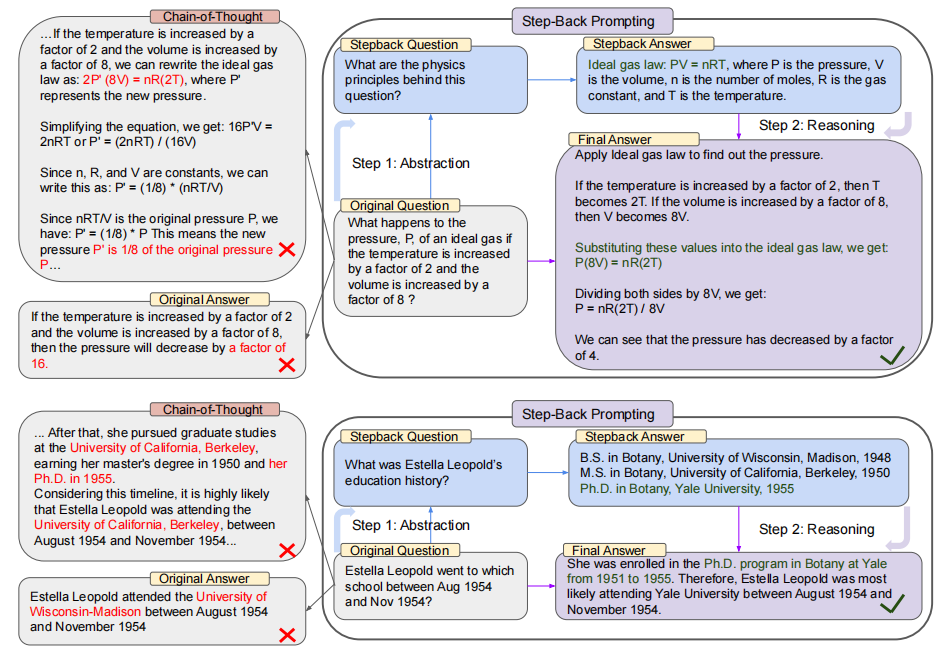
如上图所示,上半部分中,original question 是一个具体的物理问题,Step-Back Prompting 先让 LLM 进行抽象得到一个 StepBack Question,也就是“这个物理问题背后的物理定律是什么”,然后再去检索这个 StepBack Question 得到相关事实,然后基于以上信息去让 LLM 做 reasoning 得到 final answer。
简而言之,Step-Back Prompting 包含两个简单的步骤:
- Abstraction:先让 LLM 根据 original question 提出一个更高层次概念的 step-back question,并检索这个 step-back question 的相关事实
- Reasoning:基于高层次概念或原则的事实,LLM 就可以去推理原始问题的解决方案了。
分析讨论
StepBack Prompting 思路中的“抽象”通过去除不相关的细节和提炼高级概念或原则来指导具体问题的解决。
通过实验分析,abstraction 对于 LLM 来说是一个简单的任务,通过一些 few-shot exemplar 即可使用 in-context learning 来学会,但 reasoning 对于 LLM 来说仍然是最难学会的任务,在多个 error cases 上做分析,推理仍然是主要的错误来源。
相关文章:
【LLM 论文】Step-Back Prompting:先解决更高层次的问题来提高 LLM 推理能力
论文:Take a Step Back: Evoking Reasoning via Abstraction in Large Language Models ⭐⭐⭐⭐ Google DeepMind, ICLR 2024, arXiv:2310.06117 论文速读 该论文受到的启发是:人类再解决一个包含很多细节的具体问题时,先站在更高的层次上解…...

Java——接口的补充
目录 一:接口的注意事项 1. 接口中不能有方法块; 2. 接口没有构造方法: 3.接口是可以多继承的; 4. 多个接口抽象方法重复 5. 类的父类方法与接口方法重复 二:类与接口 1. 继承与实现 2. 多个父接口的抽象…...

word转pdf的java实现(documents4j)
一、多余的话 java实现word转pdf可用的jar包不多,很多都是收费的。最近发现com.documents4j挺好用的,它支持在本机转换,也支持远程服务转换。但它依赖于微软的office。电脑需要安装office才能转换。鉴于没在linux中使用office,本…...
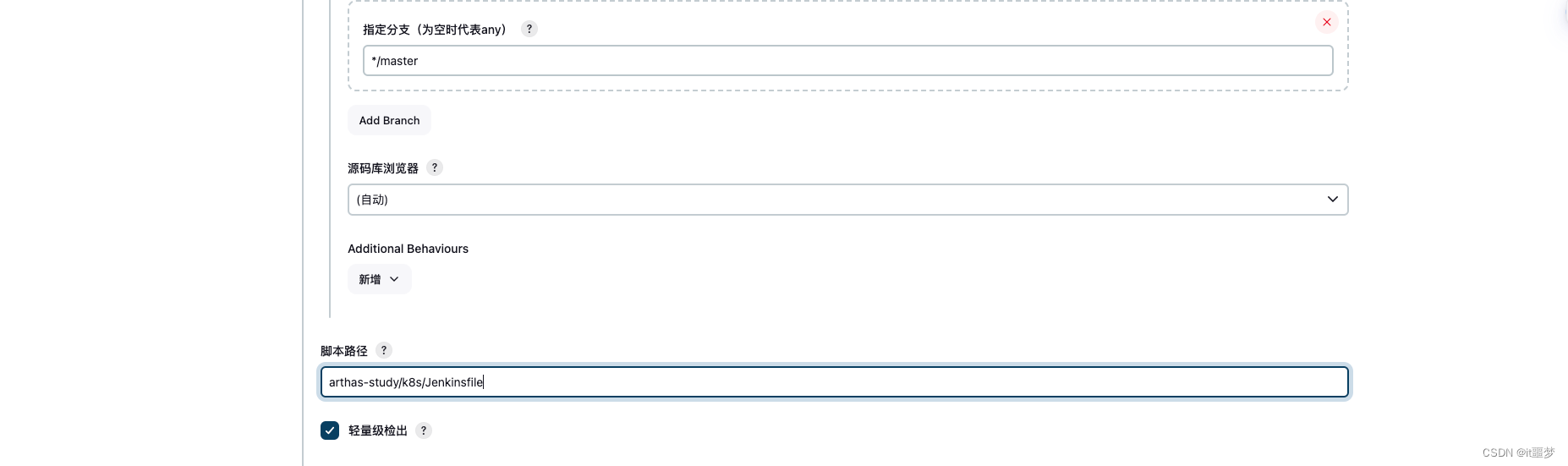
基于K8S构建Jenkins持续集成平台
文章目录 安装和配置NFSNFS简介NFS安装 在Kubernetes安装Jenkins-Master创建NFS client provisioner安装Jenkins-Master Jenkins与Kubernetes整合实现Jenkins与Kubernetes整合构建Jenkins-Slave自定义镜像 JenkinsKubernetesDocker完成微服务持续集成拉取代码,构建镜…...

PHPStudy 访问网页 403 Forbidden禁止访问
涉及靶场 upload-labd sqli-labs pikachu dvwa 以及所有部署在phpstudy中的靶场 注意:一定要安装解压软件 很多同学解压靶场代码以后访问报错的原因是:电脑上没有解压软件。 这个时候压缩包看起来就是黄色公文包的样子,右键只有“全部提取…...

热爱电子值得做的电子制作实验
加我zkhengyang,进嵌入式音频系统研究开发交流答疑群(课题组) AM/FM收音机散件制作,磁带随声听散件,黑白电视机散件制作,功放散件制作,闪光灯散件制作,声控灯散件,等等,可提高动手能…...

.class文件启动过程以及文件内容结构讲解
当你直接启动一个.class文件时,实际上是在操作系统中调用Java虚拟机(JVM),并将该.class文件传递给JVM以执行。现在让我们来解释一下.class文件的启动过程以及文件内容结构: 启动过程:操作系统通过指定的命…...
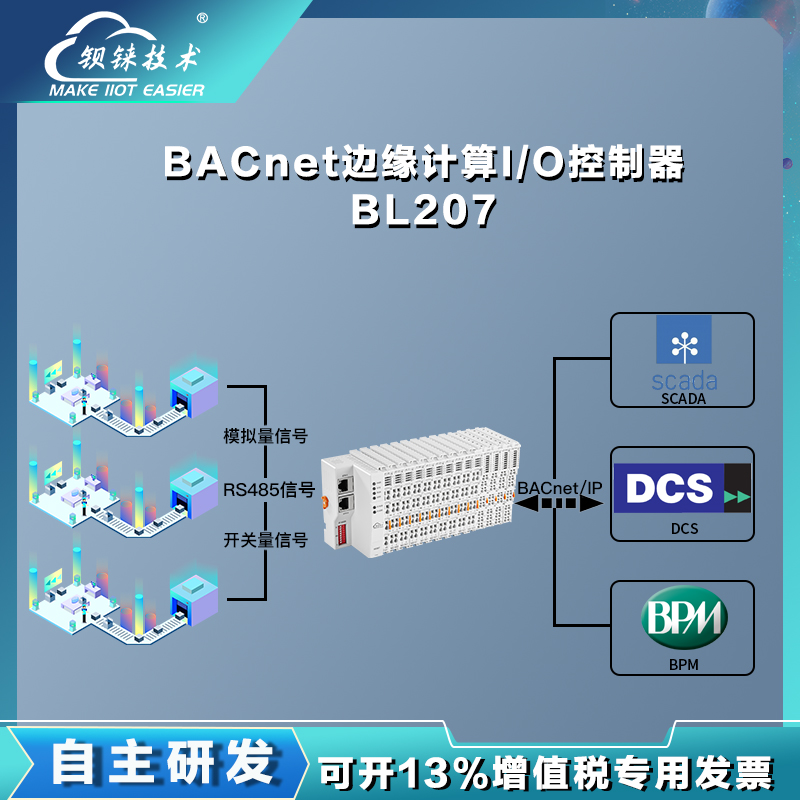
解锁楼宇自动化新维度西门子Insight+BACnet IP I/O控制器
数字城市的楼宇自动化已不再是一个遥不可及的概念,而是成为了现代建筑的标配。特别是在大型商业综合体、高端写字楼和公共设施中,高效的楼宇管理系统是确保环境舒适度与能源效率的关键。当提及楼宇自动化领域的佼佼者,西门子Insight楼宇自动化…...

2024.05.10作业
TCP服务器 头文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QTcpServer> #include <QTcpSocket> #include <QList> #include <QMessageBox> #include <QDebug>QT_BEGIN_NAMESPACE namespace Ui { class Widget; …...

基于POSIX标准库的读者-写者问题的简单实现
文章目录 实验要求分析保证读写、写写互斥保证多个读者同时进行读操作读者优先实例代码分析写者优先读写公平法示例代码分析实验要求 创建一个控制台进程,此进程包含n个线程。用这n个线程来表示n个读者或写者。每个线程按相应测试数据文件的要求进行读写操作。用信号量机制分别…...
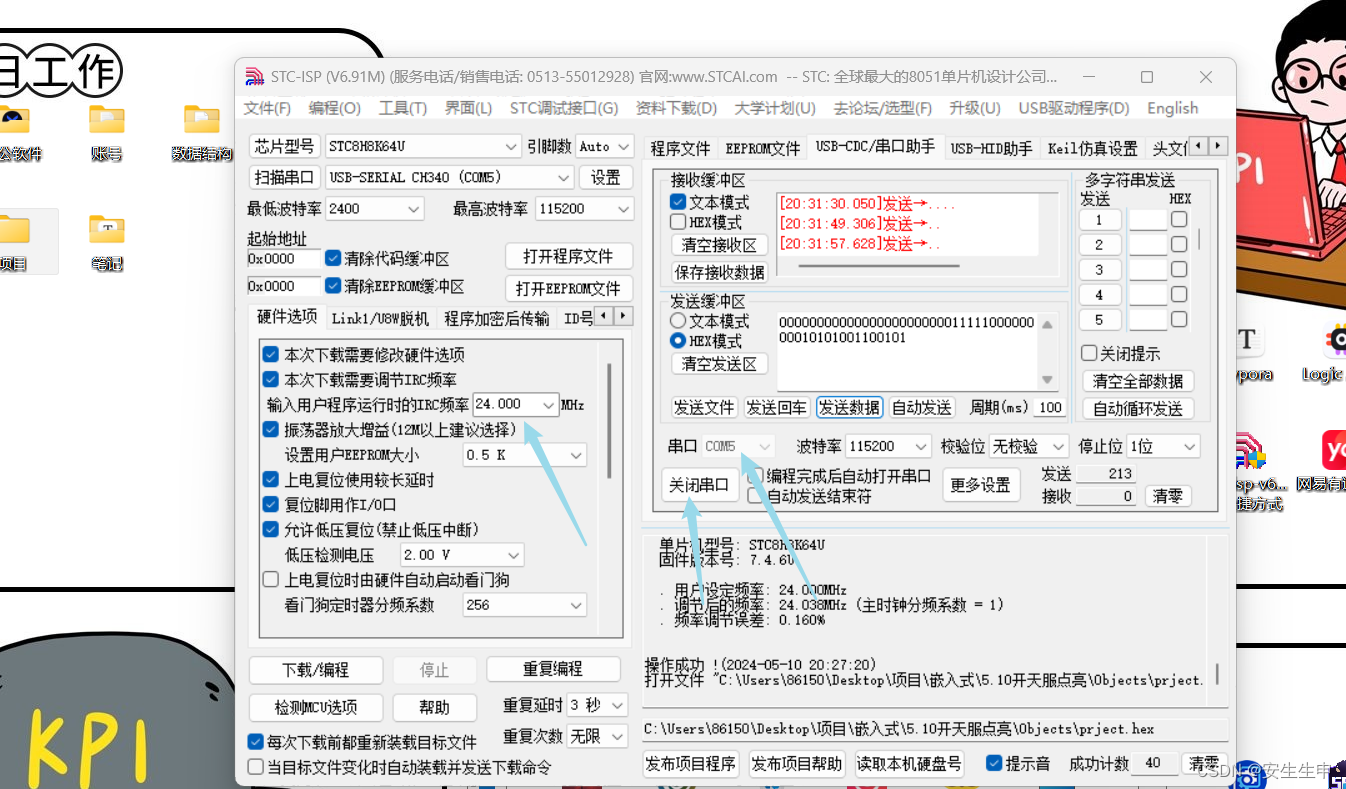
重生我是嵌入式大能之串口调试UART
什么是串口 串口是一种在数据通讯中广泛使用的通讯接口,通常我们叫做UART (通用异步收发传输器Universal Asynchronous Receiver/Transmitter),其具有数据传输速度稳定、可靠性高、适用范围广等优点。在嵌入式系统中,串口常用于与外部设备进…...
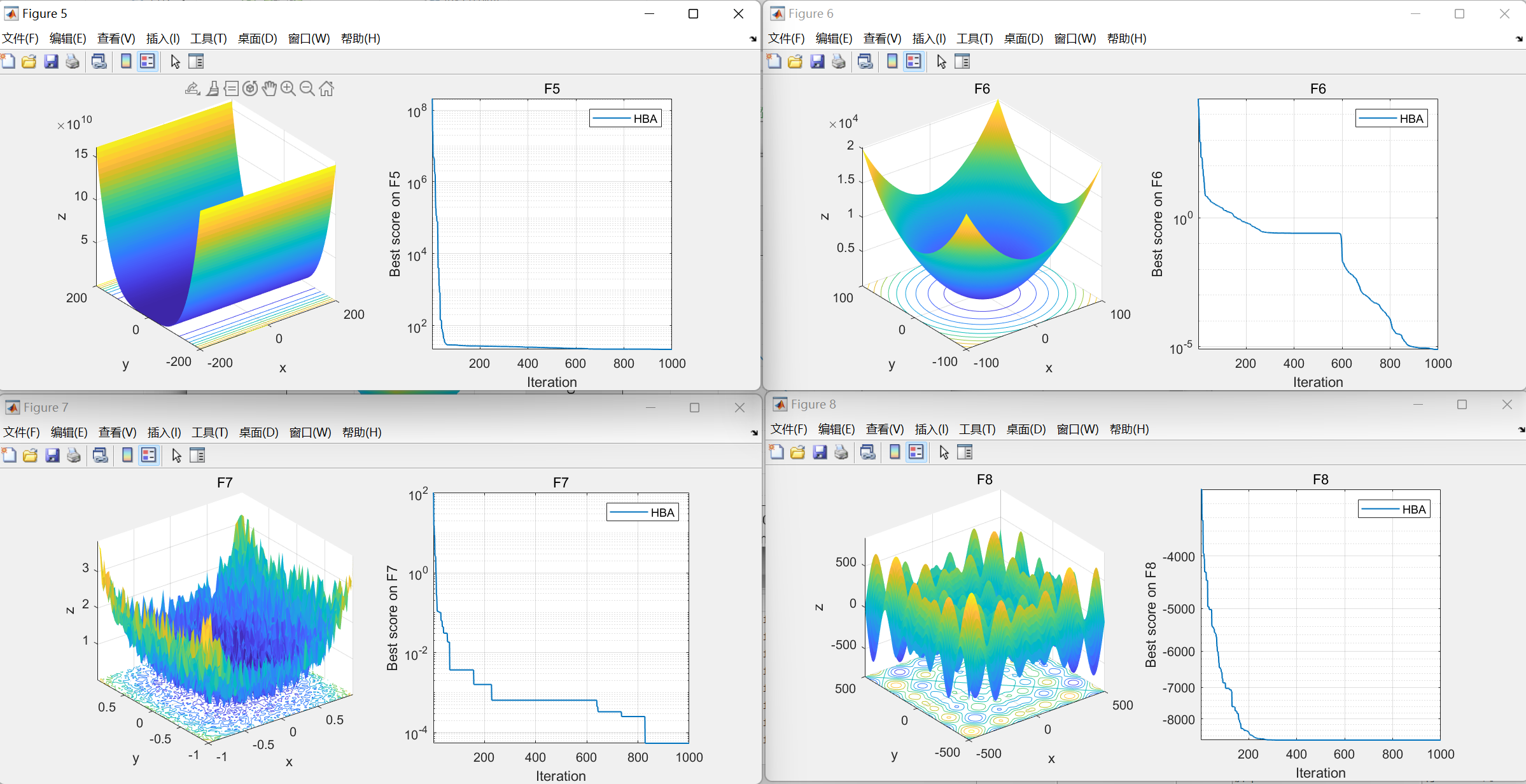
【智能优化算法】蜜獾优化算法(Honey Badger Algorithm,HBA)
蜜獾优化算法(Honey Badger Algorithm,HBA)是期刊“MATHEMATICS AND COMPUTERS IN SIMULATION”(IF 3.6)的2022年智能优化算法 01.引言 蜜獾优化算法(Honey Badger Algorithm,HBA)受蜜獾智能觅食行为的启发,从数学上发展出一种求解优化问题的…...
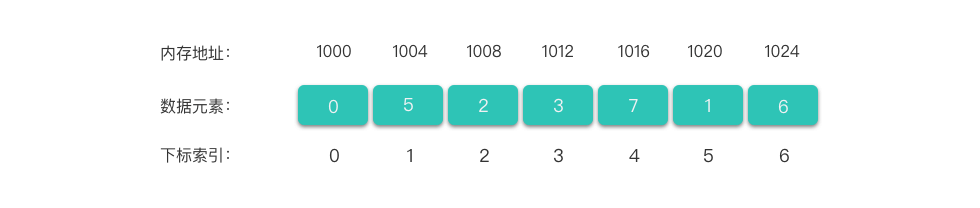
【算法与数据结构】数组
文章目录 前言数组数组的定义数组的基本操作增加元素删除元素修改元素查找元素 C STL 中的数组arrayvector Python3 中的列表访问更改元素值遍历列表检查列表中是否存在某元素增加元素删除元素拷贝列表总结 Python3 列表的常用操作 参考资料写在最后 前言 本系列专注更新基本数…...
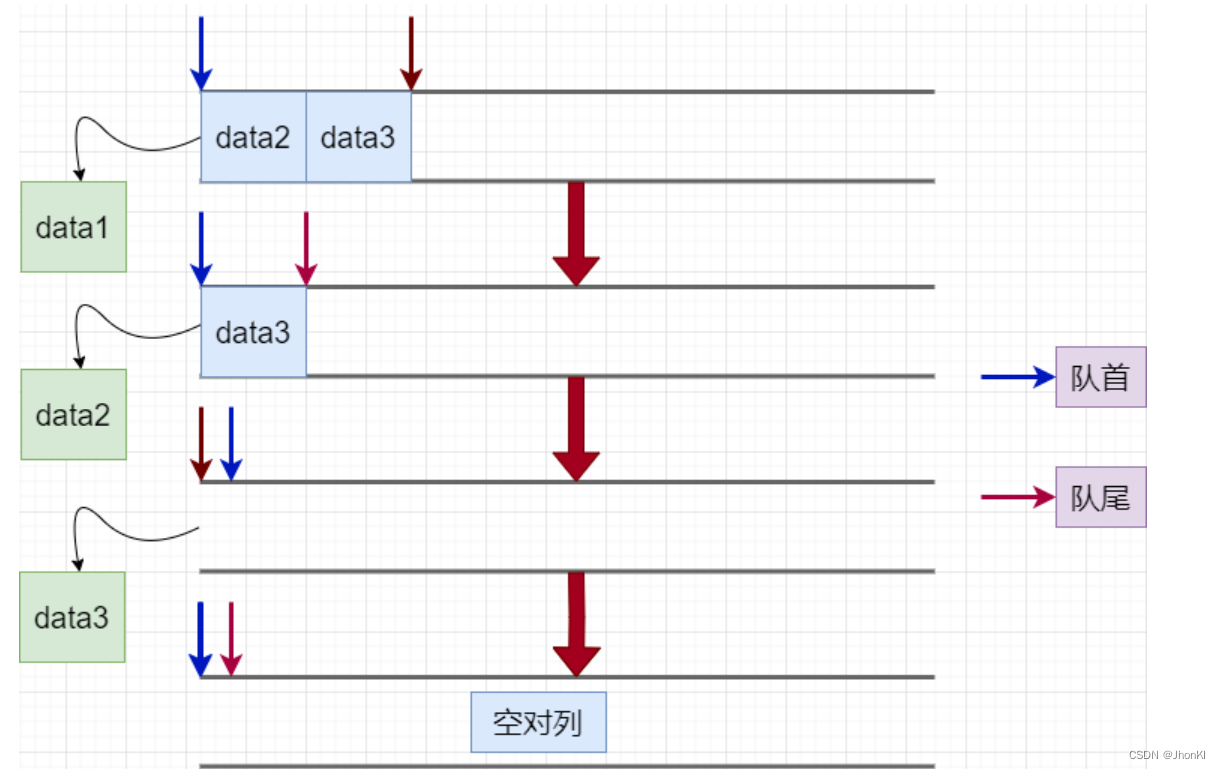
【数据结构】队列详解(Queue)
文章目录 有关队列的概念队列的结点设计及初始化队列的销毁判空和计数入队操作出队操作 有关队列的概念 队列:只允许在一端进行插入数据操作,在另一端进行删除数据操作的特殊线性表,队列具有先进先出FIFO(First In First Out)入队列:进行插入操作的一端…...
)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK获取相机的Statistics图像传输统计信息(C#)
Baumer工业相机堡盟工业相机如何通过NEOAPISDK获取相机的Statistics图像传输统计信息(C#) Baumer工业相机Baumer工业相机NEOAPI SDK和相机Statistics图像传输统计信息的技术背景Baumer工业相机通过NEOAPISDK获取相机的Statistics图像传输统计信息技术1.引…...
FreeRTOS标准库例程代码
1.设备STM32F103C8T6 2.工程模板 单片机: 部分单片机的程序例程 - Gitee.comhttps://gitee.com/lovefoolnotme/singlechip/tree/master/STM32_FREERTOS/1.%E5%B7%A5%E7%A8%8B%E6%A8%A1%E6%9D%BF 3.代码 1-FreeRTOS移植模板 #include "system.h" #include "…...
wandb: - 0.000 MB of 0.011 MB uploaded持续出现的解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...

分布式模式让业务更高效、更安全、更稳定
🌈 个人主页:danci_ 🔥 系列专栏:《设计模式》 💪🏻 制定明确可量化的目标,坚持默默的做事。 🚀 转载自热榜文章🔥:探索设计模式的魅力:分布式模…...
5.11学习记录
20长安杯部分 检材 1 的操作系统版本 CentOS Linux 7.6.1810 (Core) 检材 1 中,操作系统的内核版本是 3.10.0-957.el7.x86_64 检材 1 中磁盘包含一个 LVM 逻辑卷,该 LVM 开始的逻辑区块地址(LBA)是 2099200 物理卷ÿ…...

Java类加载器介绍
在Java中,类加载器是一种动态加载类的机制,它负责在运行时查找、加载和链接类文件。当Java应用程序需要创建某个类的对象时,类加载器会在运行时查找该类对应的.class文件,并将其加载到Java虚拟机中。Java类加载器通常分为三层&…...

Qwen2.5-72B-Instruct-GPTQ-Int4实战案例:新能源电池BMS日志分析与故障模式推演
Qwen2.5-72B-Instruct-GPTQ-Int4实战案例:新能源电池BMS日志分析与故障模式推演 1. 项目背景与模型介绍 新能源电池管理系统(BMS)是电动汽车和储能系统的核心组件,每天产生大量运行日志数据。传统分析方法依赖人工经验,效率低下且难以发现潜…...

Legacy iOS Kit终极指南:旧款iOS设备降级、越狱与恢复完整教程
Legacy iOS Kit终极指南:旧款iOS设备降级、越狱与恢复完整教程 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to downgrade/restore, save SHSH blobs, and jailbreak legacy iOS devices 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...

cv_unet_image-colorization模型监控:推理延迟与成功率实时看板
cv_unet_image-colorization模型监控:推理延迟与成功率实时看板 1. 项目背景与监控需求 在实际的图像上色应用场景中,用户不仅关心最终的上色效果,更需要了解模型的运行状态和性能表现。特别是对于需要批量处理历史照片的用户来说ÿ…...

圆周率日:致敬科技先驱与创新成就
圆周率日(Pi Day) 是每年一度的数学常数π(圆周率)的庆祝活动,定于3月14日,因为3、1、4是π的前三个有效数字。圆周率日于1988年首次被庆祝,自那时起,庆祝活动通常包括吃馅饼或举办各…...

SEO网站推广的发展历程是怎样的
<h2>SEO网站推广的发展历程:从初始阶段到现代优化</h2> <p>随着互联网的迅速发展,搜索引擎优化(SEO)作为网站推广的重要手段,经历了漫长而复杂的发展历程。SEO的进化不仅改变了网站如何被搜索引擎索…...

C# 扩展方法只会写 this 吗?C# 14 新语法直接把扩展方法玩出了花
从静态方法到扩展块# 传统的扩展方法需要每个方法都重复写 this 参数,且只能扩展方法。新语法通过 extension 关键字定义一个块,将目标类型集中声明。 传统写法是这样的 public static class StringExtensions {// 每个方法都要写一遍 (this string s…...

3步实现风扇智能控制:Windows系统散热与噪音平衡全指南
3步实现风扇智能控制:Windows系统散热与噪音平衡全指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/f…...

如何永久保存微信聊天记录?免费开源工具WeChatMsg完整指南
如何永久保存微信聊天记录?免费开源工具WeChatMsg完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...

具身智能“标准线”划定,行业分化加剧?
近期具身智能行业有两件大事,宇树科技计划 IPO,首个行业标准发布。这两条“标准线”的确立,或使品牌和投融资市场迎来马太效应,推动行业分化。标准确立,行业分化开端具身智能行业的两件大事看似关联不大,实…...

别再只盯着PID了!用STM32 HAL库的PWM差速,让你的5路红外寻迹小车先跑起来
别再只盯着PID了!用STM32 HAL库的PWM差速,让你的5路红外寻迹小车先跑起来 第一次做红外寻迹小车时,我也被各种PID教程绕得晕头转向。直到有天深夜调试时,我突然意识到——为什么非要一开始就用复杂的PID算法?对于简单…...