LeetCode题练习与总结:二叉树的中序遍历--94
一、题目描述
给定一个二叉树的根节点 root ,返回 它的 中序 遍历 。
示例 1:
输入:root = [1,null,2,3] 输出:[1,3,2]
示例 2:
输入:root = [] 输出:[]
示例 3:
输入:root = [1] 输出:[1]
提示:
- 树中节点数目在范围
[0, 100]内 -100 <= Node.val <= 100
二、递归方法
(一)解题思路
- 如果当前节点为空,返回。
- 递归遍历左子树。
- 访问当前节点,将节点的值添加到结果列表中。
- 递归遍历右子树。
(二)具体代码
class Solution {public List<Integer> inorderTraversal(TreeNode root) {List<Integer> result = new ArrayList<>();inorder(root, result);return result;}private void inorder(TreeNode node, List<Integer> result) {if (node == null) {return;}inorder(node.left, result);result.add(node.val);inorder(node.right, result);}
}
(三)时间复杂度和空间复杂度
1. 时间复杂度
- 递归方法会访问树中的每个节点恰好一次,因此时间复杂度与树中节点的数量成正比。
- 在这个算法中,每个节点都会被访问一次,所以时间复杂度是 O(n),其中 n 是二叉树中的节点数。
2. 空间复杂度
- 递归方法的空间复杂度主要取决于递归栈的深度,这通常与树的高度成正比。
- 在最坏的情况下,树完全不平衡,每个节点都只有左子节点或者只有右子节点,递归栈的深度会达到节点数 n,因此空间复杂度为 O(n)。
- 在最好的情况下,树是完全平衡的,递归栈的深度是 log(n),因此空间复杂度为 O(log(n))。
- 综合考虑,空间复杂度在最坏情况下是 O(n),在最好情况下是 O(log(n)),平均情况下则介于两者之间。
综上所述,递归方法的中序遍历代码的时间复杂度是 O(n),空间复杂度在最坏情况下是 O(n),在最好情况下是 O(log(n))。
(四)总结知识点
1. 递归(Recursion):
- 代码中使用了递归函数
inorder来遍历二叉树的左子树、根节点和右子树。 - 递归是一种常用的算法设计技巧,它通过函数自身调用自己来进行循环。
2. 二叉树(Binary Tree):
- 代码操作的数据结构是二叉树,每个节点包含一个值和指向左右子节点的引用。
- 二叉树是一种基础的数据结构,常用于各种算法问题。
3. 二叉树的中序遍历(Inorder Traversal of a Binary Tree):
- 中序遍历是一种遍历二叉树的方法,按照“左-根-右”的顺序访问每个节点。
- 这是二叉树遍历的三种基本方法之一(其他两种是前序遍历和后序遍历)。
4. Java 集合框架(Java Collections Framework):
- 代码使用了
ArrayList来存储遍历的结果,这是 Java 集合框架中的一个类。 ArrayList是一个可调整大小的数组实现,提供了对元素的快速随机访问。
5. 函数定义和调用(Function Definition and Invocation):
- 代码定义了两个函数:
inorderTraversal和inorder。 inorderTraversal是公共方法,供外部调用;inorder是私有辅助方法,用于递归遍历。
6. 基本语法(Basic Syntax):
- 代码使用了基本的 Java 语法,如类定义、方法定义、条件语句(if)、返回语句(return)等。
7. 递归栈(Recursive Stack):
- 虽然代码中没有显式使用栈数据结构,但递归函数在调用时会使用调用栈来存储每一层递归的状态。
三、迭代方法
(一)解题思路
- 初始化一个空栈和一个空列表。
- 将根节点及其所有左子节点入栈。
- 弹出栈顶元素,将其值添加到结果列表中。
- 将弹出节点的右子节点及其所有左子节点入栈。
- 重复步骤3和4,直到栈为空。
(二)具体代码
import java.util.Stack;class Solution {public List<Integer> inorderTraversal(TreeNode root) {List<Integer> result = new ArrayList<>();Stack<TreeNode> stack = new Stack<>();TreeNode current = root;while (current != null || !stack.isEmpty()) {while (current != null) {stack.push(current);current = current.left;}current = stack.pop();result.add(current.val);current = current.right;}return result;}
}
(三)时间复杂度和空间复杂度
1. 时间复杂度
- 中序遍历需要访问二叉树中的每个节点一次,因此时间复杂度与二叉树中节点的数量成正比。
- 在这个算法中,每个节点都会被访问一次,所以时间复杂度是 O(n),其中 n 是二叉树中的节点数。
2. 空间复杂度
- 空间复杂度主要取决于迭代过程中使用的栈的大小。
- 在最坏的情况下,树完全不平衡,每个节点都只有左子节点或者只有右子节点,栈的大小会达到节点数 n,因此空间复杂度为 O(n)。
- 在最好的情况下,树是完全平衡的,栈的大小是 log(n),因此空间复杂度为 O(log(n))。
- 综合考虑,空间复杂度在最坏情况下是 O(n),在最好情况下是 O(log(n)),平均情况下则介于两者之间。
综上所述,这段代码的时间复杂度是 O(n),空间复杂度在最坏情况下是 O(n),在最好情况下是 O(log(n))。
(四)总结知识点
1. 迭代(Iteration):
- 代码使用了一个循环结构来迭代地遍历二叉树的节点,而不是使用递归。
2. 栈(Stack)数据结构:
- 代码使用了一个
Stack来存储访问过的节点,以便后续能够按照正确的顺序访问它们的右子节点。 - 栈是一种后进先出(LIFO)的数据结构,非常适合用于这种需要回溯的场景。
3. 二叉树(Binary Tree):
- 代码操作的数据结构是二叉树,每个节点包含一个值和指向左右子节点的引用。
- 二叉树是一种基础的数据结构,常用于各种算法问题。
4. 二叉树的中序遍历(Inorder Traversal of a Binary Tree):
- 中序遍历是一种遍历二叉树的方法,按照“左-根-右”的顺序访问每个节点。
- 这是二叉树遍历的三种基本方法之一(其他两种是前序遍历和后序遍历)。
5. Java 集合框架(Java Collections Framework):
- 代码使用了
ArrayList来存储遍历的结果,这是 Java 集合框架中的一个类。 ArrayList是一个可调整大小的数组实现,提供了对元素的快速随机访问。- 同时,代码使用了
Stack类来实现栈数据结构。
6. 循环和条件语句(Loop and Conditional Statements):
- 代码使用了
while循环来迭代遍历树节点,并使用了if语句来检查当前节点是否为空。
7. 函数定义和调用(Function Definition and Invocation):
- 代码定义了一个公共方法
inorderTraversal,供外部调用。
8. 基本语法(Basic Syntax):
- 代码使用了基本的 Java 语法,如类定义、方法定义、循环结构、条件语句等。
以上就是解决这个问题的详细步骤,希望能够为各位提供启发和帮助。
相关文章:
LeetCode题练习与总结:二叉树的中序遍历--94
一、题目描述 给定一个二叉树的根节点 root ,返回 它的 中序 遍历 。 示例 1: 输入:root [1,null,2,3] 输出:[1,3,2]示例 2: 输入:root [] 输出:[]示例 3: 输入:roo…...
云计算十三课
centos安装 点击左上角文件 点击新建虚拟机 点击下一步 点击稍后安装操作系统,下一步 选择Linux(l)下一步 设置虚拟机名称 点击浏览选择安装位置 新建文件夹设置名称不能为中文,点击确定 点击下一步 设置磁盘大小点击下一步…...
[数据集][目标检测]电力场景安全帽检测数据集VOC+YOLO格式295张2类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):295 标注数量(xml文件个数):295 标注数量(txt文件个数):295 标注类别…...

AtCoder Beginner Contest 308 A题 New Scheme
A题:New Scheme 标签:模拟 题意:给定 8 8 8个数的序列,询问这些数是否满足以下条件: 在 100 100 100到 675 675 675之间且能被 25 25 25整除序列是单调非递减的 题解:按题意模拟判断就好了。 代码&#…...

C++编程与朱元墇的关系
学编程和英语没关系,我说这句话,没人会相信,也不会有人说我什么哗众取宠。 我说学编程和朱元墇有关系,一定有人说我放P,其实这个P也和朱元墇有关系, 和朱元墇有什么P关系啊。 真有这P事啊, 朱元…...

0060__设计模式
1. 简单工厂模式( Simple Factory Pattern ) — Graphic Design Patterns 工厂模式 | 菜鸟教程 【设计模式——学习笔记】23种设计模式——建造者模式Builder(原理讲解应用场景介绍案例介绍Java代码实现)-CSDN博客 设计模式—— 五:迪米特…...
【Linux 网络】网络编程套接字 -- 详解
⚪ 预备知识 1、理解源 IP 地址和目的 IP 地址 举例理解:(唐僧西天取经) 在 IP 数据包头部中 有两个 IP 地址, 分别叫做源 IP 地址 和目的 IP 地址。 如果我们的台式机或者笔记本没有 IP 地址就无法上网,而因为…...

编译OpenResty遇到找不到OpenSSL的解决办法
以OpenResty-1.19.9.1为例 编辑openresty-1.19.9.1/build/nginx-1.19.9/auto/lib/openssl/conf CORE_INCS"$CORE_INCS $OPENSSL/.openssl/include" CORE_DEPS"$CORE_DEPS $OPENSSL/.openssl/include/openssl/ssl.h" CORE_LIBS"$CORE_LIBS $OPENSSL/.…...

Amazon Bedrock 托管 Llama 3 8B70B
Amazon Bedrock 托管 Llama 3 8B&70B,先来体验:(*实验环境账号有效期为1天,到期自动关停,请注意重要数据保护) https://dev.amazoncloud.cn/experience/cloudlab?id65fd86c7ca2a0d291be26068&visi…...

海豚调度器早期版本如何新增worker分组
在DolphinScheduler 1.3.5版本中,Worker分组通常是在部署时通过配置文件进行定义的,而不是在用户界面上直接操作。以下是在DolphinScheduler中新增Worker分组的一般步骤: 修改配置文件: DolphinScheduler的Worker分组信息通常在/…...
Debian Linux 下给Nginx 1.26.0 编译增加Brotli算法支持
明月发现参考【给Nginx添加谷歌Brotli压缩算法支持】一文给出的方法,在Debian Linux 12.5下就一直编译失败,主要的错误是因为文件缺失,在专门又安装了apt-get install libbrotli-dev的依赖库后依然会因为文件缺失无法编译完成,就这…...

中国银行从业在线教育系统,如何搭建网课平台?
如今这个时代相信没多少人是没听过网课平台的,绝大多数人对网课平台的名气是如雷贯耳的。时代的发展,让人们学习的方式变得更加的方便与快捷。今天就来和大家说说网课平台搭建都有哪些方法?网课平台难搭建么? 网课平台搭建的方法,其实网课平…...

解决java.lang.IllegalArgumentException异常的正确方法
java.lang.IllegalArgumentException 是 Java 中的一个异常类,表示方法中传递的参数不合法。这个异常通常在方法被调用时抛出,表明方法的参数出现了问题。要正确解决这个异常,你可以按照以下步骤进行: 查看异常信息:首…...

齿轮滚刀刃口钝化技术简介
介绍 在滚刀的使用中发现,进口滚刀和国产滚刀在加工质量和寿命方面存在显著差异。经过多次比较得知,滚刀的使用寿命可以达到国产滚刀的两倍以上,而进口滚刀返回原厂磨削后的使用寿命约为新刀具的90% ,但同样经过国内厂家磨削后&a…...

【ESP32接入ATK-MO1218 GPS模块】
【ESP32接入ATK-MO1218 GPS模块】 1. 引言2. ATK-MO1218 GPS模块概述3. 接入ATK-MO1218 GPS模块的步骤4. 示例代码5. 结论1. 引言 在现代的嵌入式系统和物联网项目中,精确的位置信息是至关重要的。ATK-MO1218 GPS模块作为一款高性能的GPS/北斗双模定位模块,为开发者提供了强…...
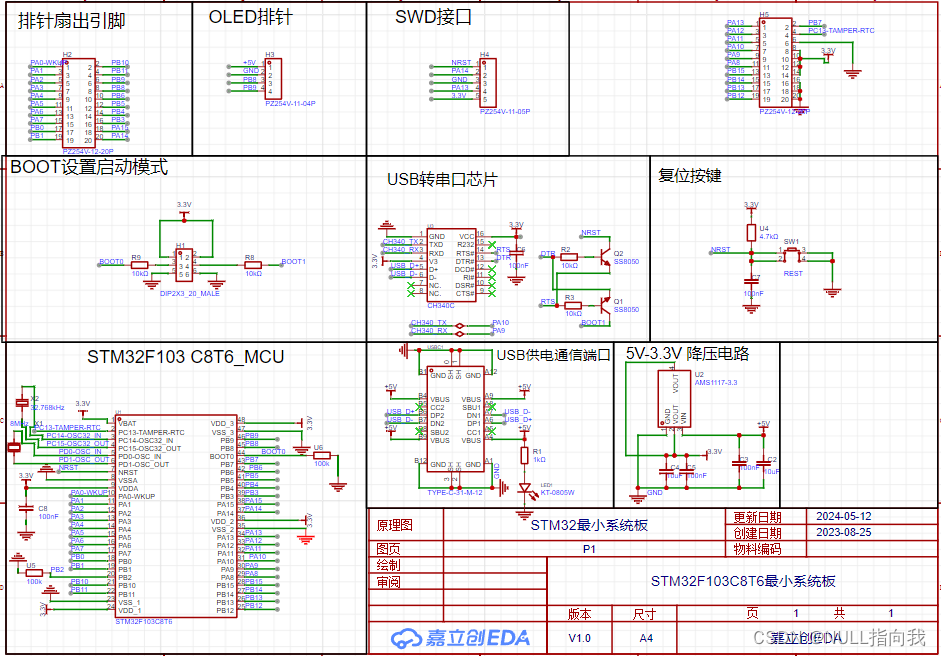
EDA设计学习笔记2:STM32F103C8T6最小系统板的仿绘
今日开始仿制练习一个STM32F103C8T6最小系统板,通过对这个最小系统板的仿制,达到对自己PCB设计的练习的目的,最终目标是自己设计出一块PCB,做一个OLED的桌面小摆件...... 也不知道画出来能不能用..... 目录 主控芯片的搜索与放置…...
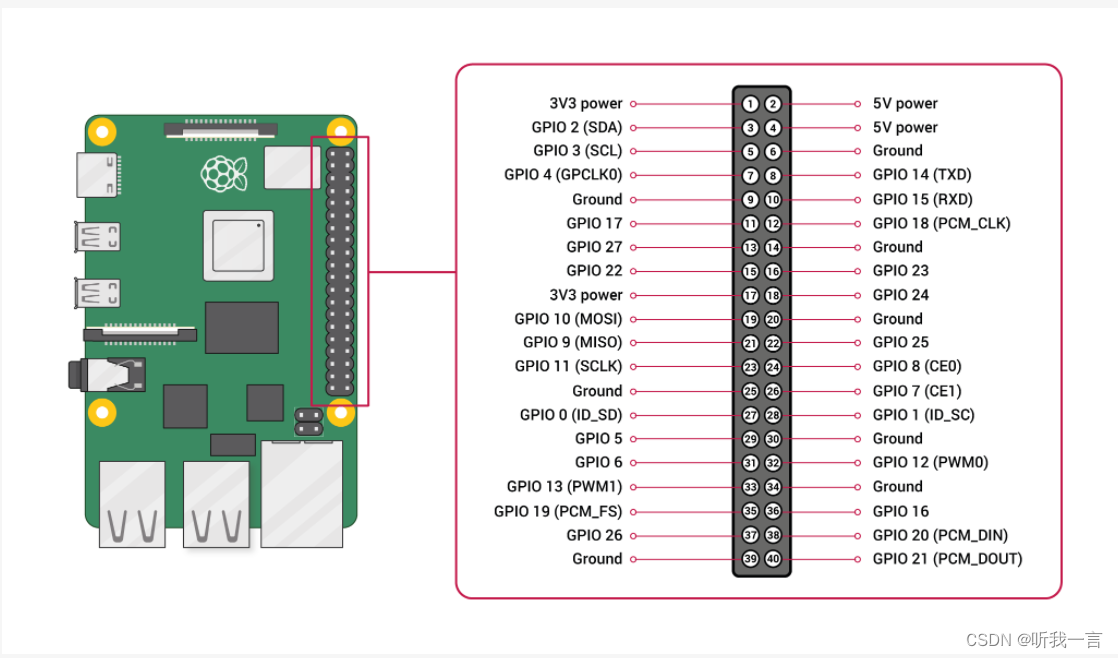
实现树莓派DS18B20读取温度(OneWire)
简介 使用的是树莓派3B, Go编程实现OneWire方式读取DS18B20温度。 接线 DS18B20 包含经典三线, VCC和GND自不必说, 主要的是DQ线, 需要接4.7K的上拉电阻, 即4.7K欧姆的电阻接到DQ和VCC, 否则树莓派识别不到DS18B20&am…...
)
Android 蓝牙实战——蓝牙音乐播放/暂停状态(二十二)
对于蓝牙音乐的播放状态,我们首先主要处理的是 onPlayStatusChanged() 回调,这是协议栈通知 FW 层的一个回调接口。还有一个就是 getPlayBackState() 方法,这是媒体应用在初始化时未收到回调信息主动获取当前状态的方法。我们这里就来分析一下这两个状态的获取流程。 一、状…...
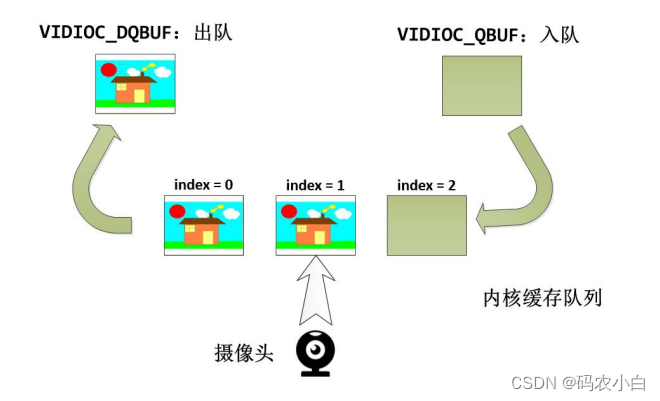
linux学习:视频输入+V4L2
目录 V4L2 视频采集流程 代码例子 核心命令字和结构体 VIDIOC_ENUM_FMT VIDIOC_G_FMT / VIDIOC_S_FMT / VIDIOC_TRY_FM VIDIOC_REQBUFS VIDIOC_QUERYBUF VIDIOC_QBUF /VIDIOC_DQBUF VIDIOC_STREAMON / VIDIOC_STREAMOFF V4L2 是 Linux 处理视频的最新标准代码模块&…...
[AutoSar]BSW_Diagnostic_004 ReadDataByIdentifier(0x22)的配置和实现
目录 关键词平台说明背景一、配置DcmDspDataInfos二、配置DcmDspDatas三、创建DcmDspDidInfos四、创建DcmDspDids五、总览六、创建一个ASWC七、mapping DCM port八、打开davinci developer,创建runnabl九、生成代码 关键词 嵌入式、C语言、autosar、OS、BSW、UDS、…...

网易云音乐API深度解析:模块化接口开发与实战应用指南
网易云音乐API深度解析:模块化接口开发与实战应用指南 【免费下载链接】NeteaseCloudMusicApiBackup 项目地址: https://gitcode.com/gh_mirrors/ne/NeteaseCloudMusicApiBackup 在当今音乐应用开发领域,后端服务的稳定性和可扩展性至关重要。网…...

FFXIV TexTools:掌握《最终幻想14》模组制作的终极指南
FFXIV TexTools:掌握《最终幻想14》模组制作的终极指南 【免费下载链接】FFXIV_TexTools_UI 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIV_TexTools_UI FFXIV TexTools是一款专为《最终幻想14》玩家设计的专业模组制作与管理框架,自2016年…...

3分钟告别窗口切换烦恼:Borderless Gaming让你的游戏体验无缝衔接
3分钟告别窗口切换烦恼:Borderless Gaming让你的游戏体验无缝衔接 【免费下载链接】Borderless-Gaming Play your favorite games in a borderless window; no more time consuming alt-tabs. 项目地址: https://gitcode.com/gh_mirrors/bo/Borderless-Gaming …...

NCM解密终极指南:3步解锁网易云音乐加密文件
NCM解密终极指南:3步解锁网易云音乐加密文件 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾经在网易云音乐下载了心爱的歌曲,却发现只能在官方客户端播放,无法在其他设备或播放器上欣赏&…...

网易云QQ音乐歌词获取终极指南:163MusicLyrics让你轻松拥有完美歌词
网易云QQ音乐歌词获取终极指南:163MusicLyrics让你轻松拥有完美歌词 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为音乐播放器缺少歌词而烦恼…...

5个实用技巧:用CaptfEncoder快速搞定网络安全编码任务
5个实用技巧:用CaptfEncoder快速搞定网络安全编码任务 【免费下载链接】CaptfEncoder Captfencoder is opensource a rapid cross platform network security tool suite, providing network security related code conversion, classical cryptography, cryptograp…...

Hi3403开发板内核升级至Linux 6.6:驱动适配与稳定性调优实战
1. 项目概述:一次内核升级背后的工程实践最近,我们团队完成了对迅为iTOP-Hi3403开发板配套SDK的一次重要更新,将内核版本从之前的长期支持版(LTS)升级到了最新的Linux 6.6。这不仅仅是一个版本号的跳动,对于…...

QQ音乐解析工具终极指南:如何轻松获取全网音乐资源
QQ音乐解析工具终极指南:如何轻松获取全网音乐资源 【免费下载链接】MCQTSS_QQMusic QQ音乐解析 项目地址: https://gitcode.com/gh_mirrors/mc/MCQTSS_QQMusic 你是否厌倦了音乐平台的层层限制?想要畅听所有歌曲却不想支付高昂的会员费ÿ…...
)
409.最长回文串(数学算法)
题目 给定一个包含大写字母和小写字母的字符串 s ,返回 通过这些字母构造成的 最长的 回文串 的长度。 在构造过程中,请注意 区分大小写 。比如 "Aa" 不能当做一个回文字符串。 题目链接如下: https://leetcode.cn/problems/longe…...

从静态地图到动态避障:图解ROS中global_costmap与local_costmap如何协同工作
从静态地图到动态避障:图解ROS中global_costmap与local_costmap如何协同工作 在机器人自主导航领域,理解代价地图的工作原理是构建可靠导航系统的关键。想象一下,当人类在陌生城市中导航时,我们会同时参考静态的城市地图和实时观察…...