机器学习周报第41周
目录
- 摘要
- Abstract
- 一、文献阅读
- 1.1 摘要
- 1.2 背景
- 1.3 论文方法
- 1.3.1 局部特征提取
- 1.3.2 局部特征转换器 (LoFTR) 模块
- 1.3.4 建立粗粒度匹配
- 1.3.5 精细匹配
- 1.4 损失
- 1.5 实现细节
- 1.6 实验
- 1.6.1 单应性估计
- 1.6.2 相对位姿估计
- 二、论文代码
- 总结
摘要
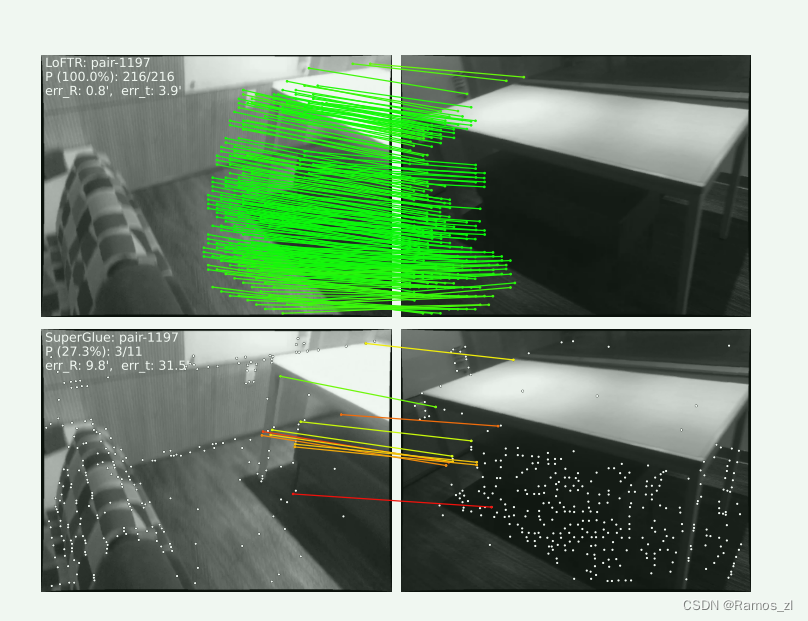
本周阅读了一篇特征匹配领域的论文。LoFTR,一种创新的局部图像特征匹配方法,为3D计算机视觉领域带来革命性突破。它摒弃了传统特征检测、描述和匹配的繁琐步骤,通过像素级的粗粒度密集匹配,优化了良好匹配的效果。该方法利用Transformer中的自注意力和交叉注意力层,获取全局感受野,解决了低纹理区域匹配难题,性能优于最先进方法。在复杂的室内和室外环境中,LoFTR展现出强大的匹配能力,特别是在处理重复纹理和模式时,其优势更为显著。相比基于检测器的SuperGlue方法,LoFTR克服了检测器在寻找对应关系时的局限性,实现了更全面的特征提取和匹配。LoFTR的成功不仅在于其创新的设计,更在于其深入理解了图像匹配的本质。它借鉴了人类视觉系统的特点,能够结合局部和全局信息进行匹配,从而提高了对应点的准确性。这一特点使得LoFTR在应对复杂环境中的匹配难题时,能够展现出更强大的能力。此外,LoFTR还通过采用线性Transformer等优化手段,降低了计算复杂度,提高了实际应用价值。这一优势使得LoFTR在保持高性能的同时,也能够满足实时性要求较高的应用场景。
Abstract
This week, I read a paper on feature matching in the field. LoFTR, an innovative local image feature matching method, has brought revolutionary breakthroughs to the 3D computer vision field. It abandons the cumbersome steps of traditional feature detection, description, and matching, and optimizes the effect of good matches through pixel-level coarse-grained dense matching. This method utilizes self-attention and cross-attention layers in Transformer to obtain global receptive fields, addressing the challenge of matching in low-texture areas and outperforming state-of-the-art methods.In complex indoor and outdoor environments, LoFTR demonstrates strong matching capabilities, especially when dealing with repetitive textures and patterns. Compared to the detector-based SuperGlue method, LoFTR overcomes the limitations of detectors in finding correspondences, achieving more comprehensive feature extraction and matching.The success of LoFTR lies not only in its innovative design but also in its deep understanding of the essence of image matching. It draws inspiration from the characteristics of the human visual system, able to combine local and global information for matching, thereby improving the accuracy of corresponding points. This characteristic enables LoFTR to demonstrate greater capabilities when dealing with matching challenges in complex environments.
Furthermore, LoFTR reduces computational complexity and enhances practical application value by adopting optimization techniques such as linear Transformer. This advantage allows LoFTR to maintain high performance while meeting the real-time requirements of demanding applications.
一、文献阅读
题目:LoFTR: Detector-Free Local Feature Matching with Transformers
1.1 摘要
我们提出了一种局部图像特征匹配的新方法。 我们建议首先在粗略水平上建立像素级密集匹配,然后在精细水平上细化良好的匹配,而不是依次执行图像特征检测、描述和匹配。 与使用成本量来搜索对应关系的密集方法相比,我们在 Transformer 中使用自注意力层和交叉注意力层来获取以两张图像为条件的特征描述符。 Transformer 提供的全局感受野使我们的方法能够在低纹理区域产生密集匹配,而特征检测器通常很难在这些区域产生可重复的兴趣点。 室内和室外数据集的实验表明,LoFTR 的性能大幅优于最先进的方法。
1.2 背景
大多数现有的匹配方法由三个独立的部分组成 阶段:特征检测、特征描述和特征匹配。
- 特征检测:从图像中提取显著且可重复的兴趣点,例如角点、边缘等。
- 特征描述:为每个检测到的兴趣点生成一个独特的描述子,以便在后续步骤中与其他图像的特征进行比较。
- 特征匹配:通过比较描述子,找到两幅图像之间的对应特征点。
特征检测器的使用减少了匹配的搜索空间。 然而,由于各种因素,例如不良纹理、重复图案、视点变化、照明变化和运动模糊等,特征检测器可能无法提取足够多的图像之间可重复的兴趣点。 这个问题在室内环境中尤其突出,低纹理区域或重复图案有时占据视野中的大部分区域。 图 1 显示了一个示例。 如果没有可重复的兴趣点,即使有完美的描述符也无法找到正确的对应关系。
最近的几项工作试图通过建立像素密集匹配来解决这个问题。 可以从密集匹配中选择具有高置信度分数的匹配,从而避免特征检测。 然而,这些作品中卷积神经网络(CNN)提取的密集特征的感受野有限,可能无法区分不明显的区域。 相反,人类在这些不明显的区域中不仅基于当地社区,而且还基于更大的全球背景来寻找对应关系。 例如,图1中的低纹理区域可以根据它们与边缘的相对位置来区分。 这一观察结果告诉我们,特征提取网络中较大的感受野至关重要。
1.3 论文方法
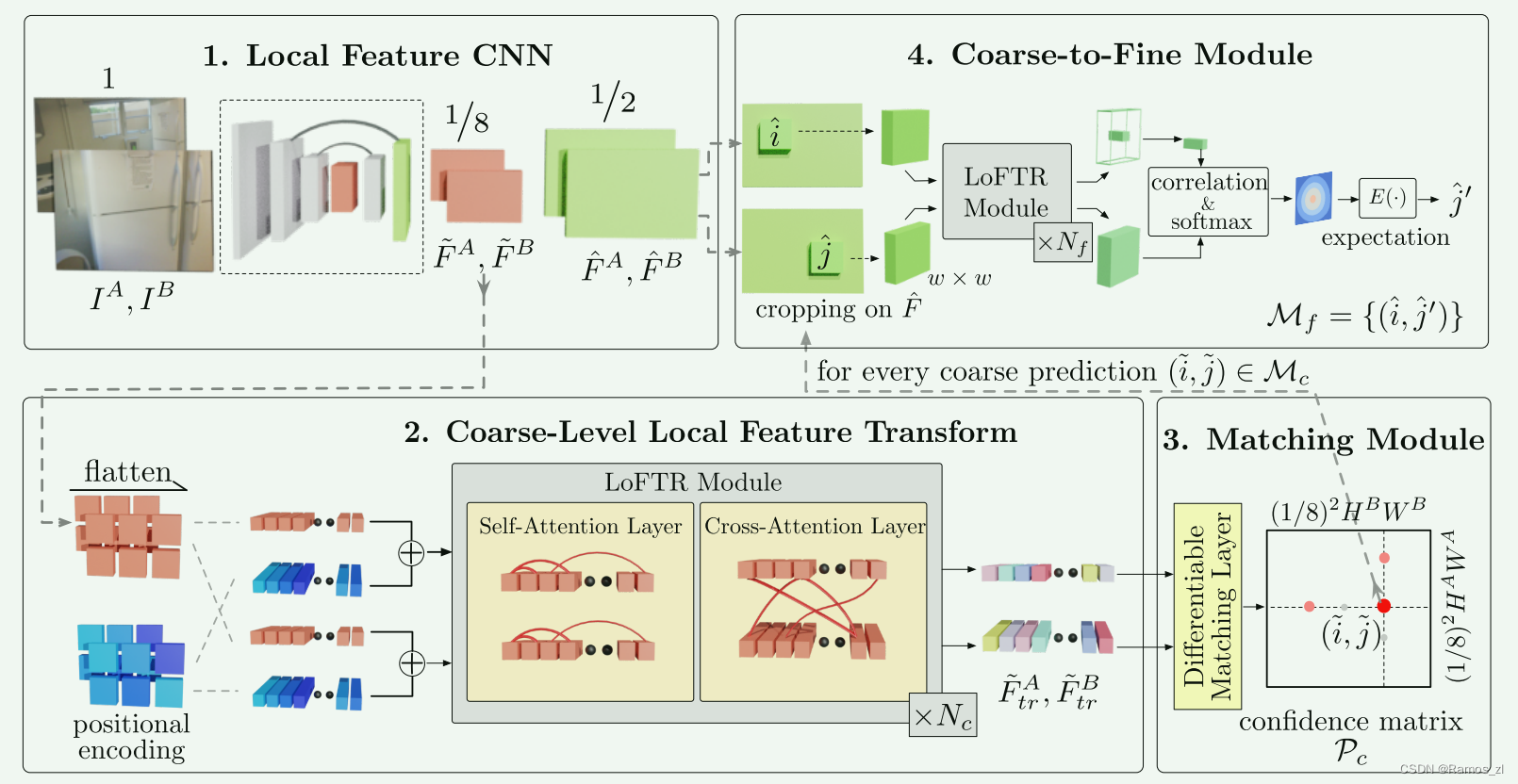
给定图像对 IA 和 IB,现有的局部特征匹配方法使用特征检测器来提取兴趣点。 我们建议通过无检测器设计来解决特征检测器的可重复性问题。 图 2 概述了所提出的 LoFTR 方法。
1.3.1 局部特征提取
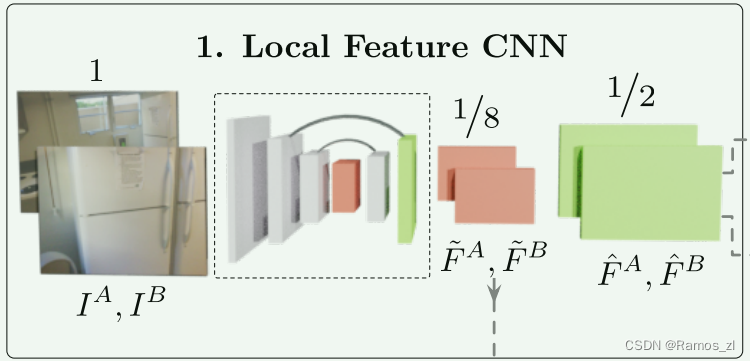
我们使用带有 FPN [22](表示为局部特征 CNN)的标准卷积架构从两个图像中提取多级特征。 我们使用 ~FA 和 ~FB表示原始图像维度1/8处的粗级特征,并且 ^FA 和 ^FB表示原始图像维度1/2处的精细级特征。 卷积神经网络(CNN)具有平移等方差和局部性的归纳偏差,非常适合局部特征提取。 CNN 引入的下采样还减少了 LoFTR 模块的输入长度,这对于确保可管理的计算成本至关重要。
1.3.2 局部特征转换器 (LoFTR) 模块
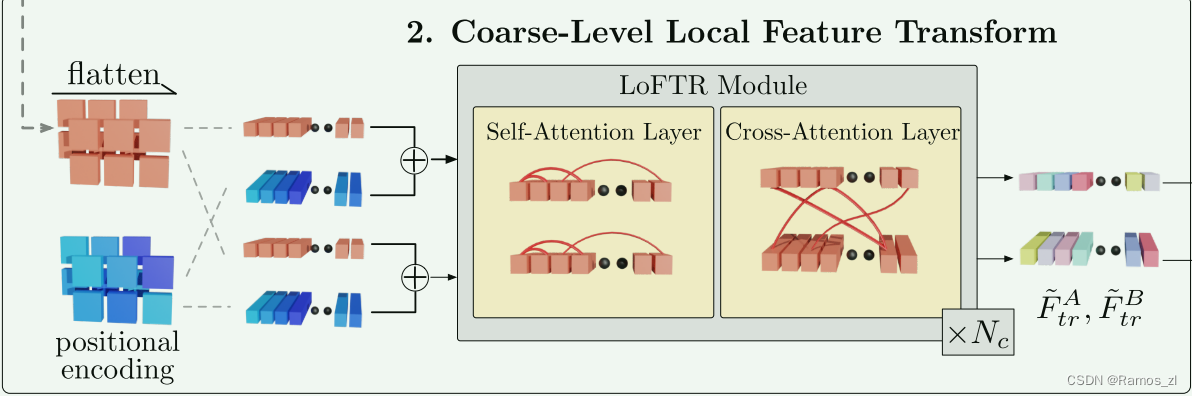
在局部特征提取之后, ~FA 和 ~FB通过LoFTR模块来提取位置和上下文相关的局部特征。 直观上,LoFTR 模块将特征转换为易于匹配的特征表示。 我们将变换后的特征表示为 F ~A tr 和 ~FB tr。
 Transformer 编码器由顺序连接的编码器层组成。 图3(a)显示了编码器层的架构。 编码器层的关键元素是注意力层。 注意力层的输入向量通常称为查询、键和值。 与信息检索类似,查询向量 Q 根据 Q 和每个值 V 对应的关键向量 K 的点积计算出的注意力权重,从值向量 V 中检索信息。注意力层的计算图如下所示 图3(b)。 形式上,注意力层表示为:
Transformer 编码器由顺序连接的编码器层组成。 图3(a)显示了编码器层的架构。 编码器层的关键元素是注意力层。 注意力层的输入向量通常称为查询、键和值。 与信息检索类似,查询向量 Q 根据 Q 和每个值 V 对应的关键向量 K 的点积计算出的注意力权重,从值向量 V 中检索信息。注意力层的计算图如下所示 图3(b)。 形式上,注意力层表示为:

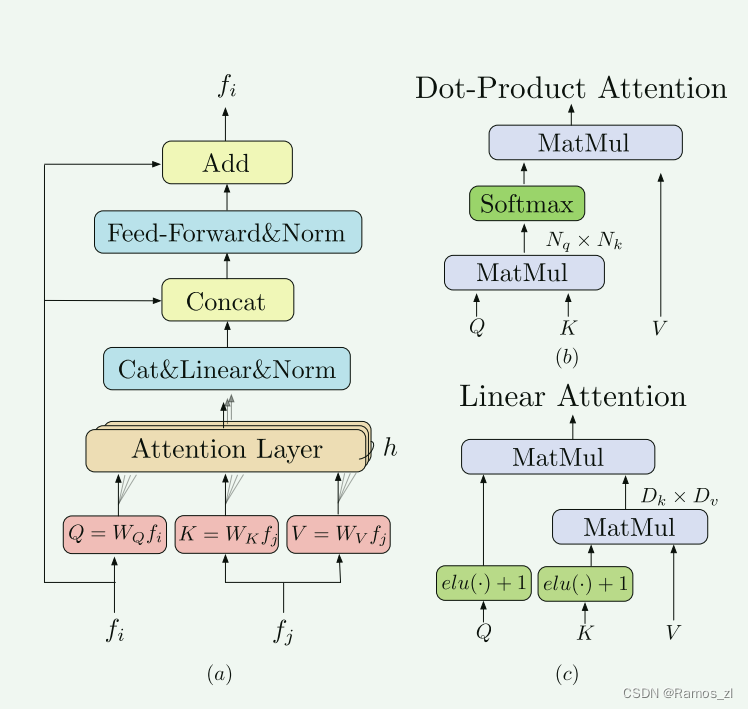
位置编码: 我们按照 DETR 在 Transformers 中使用标准位置编码的 2D 扩展。 与 DETR 不同,我们只将它们添加到骨干输出一次。 我们将位置编码的正式定义留在补充材料中。 直观上,位置编码以正弦格式为每个元素提供唯一的位置信息。 通过将位置编码添加到 F~A 和 F~B,变换后的特征将变得位置相关,这对于 LoFTR 在不明显的区域中产生匹配的能力至关重要。 如图 4© 的底行所示,虽然输入 RGB 颜色在白墙上是均匀的,但平滑颜色梯度所展示的每个位置的变换特征 F~ A tr 和 F~ B tr 都是唯一的。 图 6 提供了更多可视化效果。

自注意力和交叉注意力层: 对于自注意力层,输入特征 fi 和 fj (如图 3 所示)是相同的(〜FA 或〜FB)。 对于交叉注意力层,输入特征 fi 和 fj 要么是( FA 和 F B),要么是(FB 和 F A),具体取决于交叉注意力的方向。 遵循[37],我们将 LoFTR 模块中的自注意力层和交叉注意力层交错 Nc 次。 LoFTR 中自注意力层和交叉注意力层的注意力权重在图 4© 的前两行中可视化。
将粗略特征图输入至粗特征提取的transformer提取匹配特征,该transformer由多个交替的自注意力和交叉注意力层构成,自注意力层使得每个点关注其周围所有点的关联,交叉注意力层使得点关注与另一幅图上的所有点的关联
1.3.4 建立粗粒度匹配
使用乘积的方式先计算所有位置的匹配得分矩阵 S,然后计算最优匹配,可以通过最优传输OT算法或者dual-softmax方法,文中使用的是dual-softmax, 然后再通过互近邻MNN算法过滤掉一些离群匹配对。
匹配概率Pc由下式获得:

1.3.5 精细匹配
通过粗匹配得到粗粒度的匹配结果,例如匹配点对(i1,j1),(i2,j2), 将其映射到对应的精细特征图,并且将其(w,w)领域裁剪出来(相当于裁剪出来了w*w个位置的特征),输入至精细特征提取的transformer提取匹配特征,得到FA和FB,然后计算FA中心特征与FB中所有特征的匹配概率(即相似度),再计算该概率分布即可计算出FB中的亚像素精度的匹配点位置(应该是通过领域(5,5)以及对应的概率,加权相加计算出精细位置,是亚像素级别的)
1.4 损失
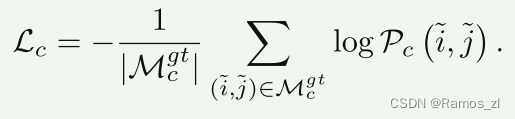
最终的coarse-to-fine上的代价由如下组成:

粗粒度代价:通过在置信矩阵Pc上使用负对数似然得到最终的代价,两个网格之间的距离是由其中心位置的重投影距离来衡量的。在使用双软性匹配时,我们将Mgt中网格的负对数可能性损失降到最低。
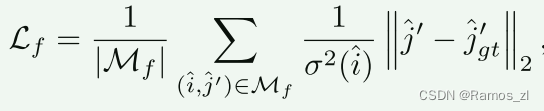
细粒度代价:我们使用ℓ2损失来进行精细的精细化。按照,对于每个查询点i,我们也通过计算总方差σ2(ˆi)来衡量其不确定性。我们的目标是要优化具有低不确定性的精炼位置,结果是形成最终的加权损失函数。
1.5 实现细节
我们在ScanNet数据集上训练了LoFTR的室内模型,并在MegaDepth上训练了室外模型,按照的方法进行。在ScanNet上,模型使用Adam进行训练,初始学习率为1×10−3,批次大小为64。经过64张GTX1080Ti GPU的24小时训练后模型收敛。局部特征CNN使用修改版的ResNet-18 [12]作为骨干网络。整个模型的权重是随机初始化的并进行端到端的训练。Nc设置为4,Nf设置为1,θc选择0.2。窗口大小w等于5。在实现中,将F˜Atr和F˜Btr上采样并与FˆA和FˆB进行拼接,然后通过细匹配级别的LoFTR。使用双向softmax匹配的完整模型在一对640×480的图像上运行时间为116毫秒,使用RTX 2080Ti。在最优传输设置下,我们使用三个Sinkhorn迭代,模型运行时间为130毫秒。更多训练和计时分析的细节请参见补充材料。
1.6 实验
1.6.1 单应性估计
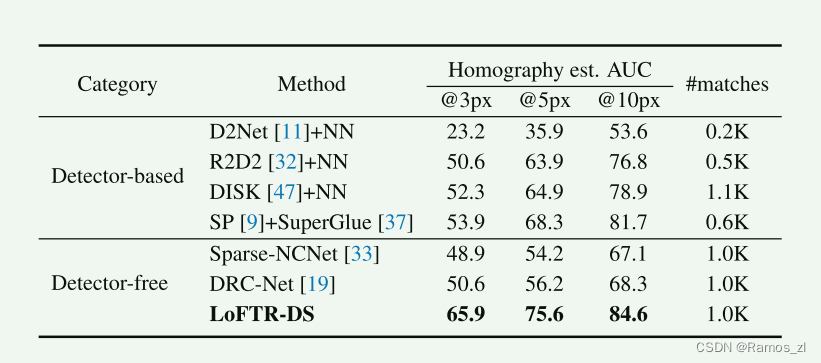
评估协议:在每个测试序列中,将一个参考图像与其他五个图像配对。所有图像的尺寸调整为较短边等于480像素。对于每对图像,我们使用在MegaDepth数据集上训练的LoFTR提取一组匹配点。我们使用OpenCV计算采用RANSAC作为鲁棒估计器的单应性矩阵估计。为了与产生不同数量匹配点的方法进行公平比较,我们使用角点误差来衡量通过估计的Hˆ对图像进行变换后与真实H之间的差异,与中的正确性指标一致。按照的做法,我们分别报告了3、5和10像素阈值下角点误差累积曲线下面积(AUC)。我们报告LoFTR输出最多1K匹配点时的结果。
基准方法:我们将LoFTR与三类方法进行比较:1)基于检测器的局部特征方法,包括R2D2、D2Net和DISK;2)基于检测器的局部特征匹配方法,即SuperGlue在SuperPoint特征上的扩展;3)无需检测器的匹配方法,包括Sparse-NCNet和DRC-Net。对于局部特征方法,我们最多提取2K个特征,并提取相互最近邻作为最终匹配点。对于直接输出匹配点的方法,我们限制最多1K个匹配点,与LoFTR一样。对于所有基准方法,我们使用原始实现中的默认超参数。
结果。表1显示,LoFTR在所有误差阈值下明显优于其他基准方法。具体而言,随着正确性阈值越来越严格,LoFTR与其他方法之间的性能差距增大。我们将顶级性能归因于无需检测器的设计提供的更多匹配候选项以及Transformer带来的全局感受野。此外,粗到精模块通过将匹配点细化到亚像素级别也有助于估计的准确性。
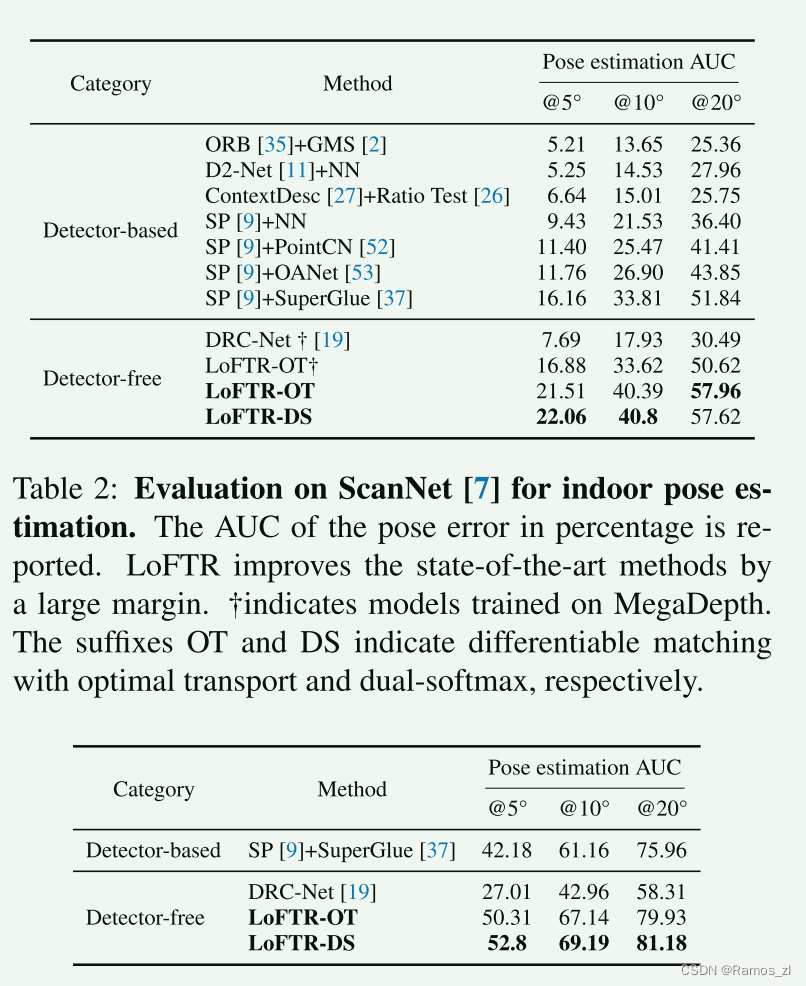
1.6.2 相对位姿估计
数据集:我们使用ScanNet和MegaDepth数据集分别展示LoFTR在室内和室外场景中进行位姿估计的效果。
ScanNet包含1613个带有地面真实位姿和深度图的单目序列。按照SuperGlue的步骤,我们对训练集采样了230M对图像,其重叠得分在0.4到0.8之间。我们在中的1500个测试图像对上评估我们的方法。所有图像和深度图的尺寸调整为640×480像素。该数据集包含了基线较大和纹理缺失区域较多的图像对。
MegaDepth由196个不同室外场景的100万张互联网图像组成。作者还提供了使用COLMAP进行稀疏重建和使用多视图立体法计算深度图的数据。我们按照DISK的方法,只使用"Sacre Coeur"和"St. Peter’s Square"两个场景进行验证,并从中采样了1500对图像用于公平比较。训练时,图像的较长边被调整为840像素,验证时调整为1200像素。MegaDepth的关键挑战是在极端视点变化和重复纹理的情况下进行匹配。
评估协议:按照的做法,我们报告在阈值为5°、10°和20°时的位姿误差的AUC,其中位姿误差定义为旋转和平移中角度误差的最大值。为了恢复相机位姿,我们使用RANSAC从预测的匹配点中求解本质矩阵。由于无需检测器的图像匹配方法缺乏定义明确的度量(如匹配得分或召回率),我们不对LoFTR和其他基于检测器的方法进行匹配精度比较。我们将DRC-Net视为无需检测器方法中的最先进方法。
二、论文代码
基础特征提取模块Local Feature CNN
通过CNN提取特征图
# 1. Local Feature CNNdata.update({'bs': data['image0'].size(0),'hw0_i': data['image0'].shape[2:], 'hw1_i': data['image1'].shape[2:]})if data['hw0_i'] == data['hw1_i']: # faster & better BN convergenceprint(torch.cat([data['image0'], data['image1']], dim=0).shape)feats_c, feats_f = self.backbone(torch.cat([data['image0'], data['image1']], dim=0))print(feats_c.shape) # 1/8print(feats_f.shape) # 1/2(feat_c0, feat_c1), (feat_f0, feat_f1) = feats_c.split(data['bs']), feats_f.split(data['bs'])print(feat_c0.shape)print(feat_c1.shape)print(feat_f0.shape)print(feat_f1.shape)else: # handle different input shapes(feat_c0, feat_f0), (feat_c1, feat_f1) = self.backbone(data['image0']), self.backbone(data['image1'])print(feat_c0.shape)print(feat_c1.shape)print(feat_f0.shape)print(feat_f1.shape)data.update({'hw0_c': feat_c0.shape[2:], 'hw1_c': feat_c1.shape[2:],'hw0_f': feat_f0.shape[2:], 'hw1_f': feat_f1.shape[2:]})这里的backbone就是一系列的卷积和连接操作,可以跳入self.backbone中去:
def forward(self, x):# ResNet Backbonex0 = self.relu(self.bn1(self.conv1(x)))x1 = self.layer1(x0) # 1/2x2 = self.layer2(x1) # 1/4x3 = self.layer3(x2) # 1/8# FPNx3_out = self.layer3_outconv(x3)x3_out_2x = F.interpolate(x3_out, scale_factor=2., mode='bilinear', align_corners=True)x2_out = self.layer2_outconv(x2)x2_out = self.layer2_outconv2(x2_out+x3_out_2x)x2_out_2x = F.interpolate(x2_out, scale_factor=2., mode='bilinear', align_corners=True)x1_out = self.layer1_outconv(x1)x1_out = self.layer1_outconv2(x1_out+x2_out_2x)return [x3_out, x1_out]注意力机制应用 coarse-level loftr module
# 2. coarse-level loftr module# add featmap with positional encoding, then flatten it to sequence [N, HW, C]# 添加位置编码feat_c0 = rearrange(self.pos_encoding(feat_c0), 'n c h w -> n (h w) c')print(feat_c0.shape)feat_c1 = rearrange(self.pos_encoding(feat_c1), 'n c h w -> n (h w) c')print(feat_c1.shape)mask_c0 = mask_c1 = None # mask is useful in trainingif 'mask0' in data:mask_c0, mask_c1 = data['mask0'].flatten(-2), data['mask1'].flatten(-2)# 进入transformer模块,这是论文的核心模块feat_c0, feat_c1 = self.loftr_coarse(feat_c0, feat_c1, mask_c0, mask_c1)print(feat_c0.shape)print(feat_c1.shape)进入self.loftr_coarse模块,这里需要计算自身的attention注意力,还需要将两张图像计算cross attention,从代码中的循环中可以看到,self和cross两种操作分别是自己和自己计算注意力以及自己和其他特征图计算注意力,从layer的计算参数可以明确这一点。
def forward(self, feat0, feat1, mask0=None, mask1=None):"""Args:feat0 (torch.Tensor): [N, L, C]feat1 (torch.Tensor): [N, S, C]mask0 (torch.Tensor): [N, L] (optional)mask1 (torch.Tensor): [N, S] (optional)"""assert self.d_model == feat0.size(2), "the feature number of src and transformer must be equal"for layer, name in zip(self.layers, self.layer_names):if name == 'self':feat0 = layer(feat0, feat0, mask0, mask0)print(feat0.shape)feat1 = layer(feat1, feat1, mask1, mask1)print(feat1.shape)elif name == 'cross':feat0 = layer(feat0, feat1, mask0, mask1)print(feat0.shape)feat1 = layer(feat1, feat0, mask1, mask0)print(feat1.shape)else:raise KeyErrorprint(feat0.shape)print(feat1.shape)return feat0, feat1具体的计算layer在LoFTREncoderLayer定义中,这里就是基本的attention计算方法,主要是QKV的计算和一些线性计算、连接操作。
def forward(self, x, source, x_mask=None, source_mask=None):"""Args:x (torch.Tensor): [N, L, C]source (torch.Tensor): [N, S, C]x_mask (torch.Tensor): [N, L] (optional)source_mask (torch.Tensor): [N, S] (optional)"""bs = x.size(0)query, key, value = x, source, source# multi-head attentionquery = self.q_proj(query).view(bs, -1, self.nhead, self.dim) # [N, L, (H, D)]key = self.k_proj(key).view(bs, -1, self.nhead, self.dim) # [N, S, (H, D)]value = self.v_proj(value).view(bs, -1, self.nhead, self.dim)message = self.attention(query, key, value, q_mask=x_mask, kv_mask=source_mask) # [N, L, (H, D)]message = self.merge(message.view(bs, -1, self.nhead*self.dim)) # [N, L, C]message = self.norm1(message)# feed-forward networkmessage = self.mlp(torch.cat([x, message], dim=2))message = self.norm2(message)return x + message粗粒度匹配模块 match coarse-level
# 3. match coarse-levelself.coarse_matching(feat_c0, feat_c1, data, mask_c0=mask_c0, mask_c1=mask_c1)跟入coarse_matching模块
通过注意力机制获取到两个图像的特征图,进入到粗粒度匹配模块,粗粒度匹配是采用的内积的计算方式,即下面代码的torch.einsum计算,然后通过softmax转成概率值。
def forward(self, feat_c0, feat_c1, data, mask_c0=None, mask_c1=None):"""Args:feat0 (torch.Tensor): [N, L, C]feat1 (torch.Tensor): [N, S, C]data (dict)mask_c0 (torch.Tensor): [N, L] (optional)mask_c1 (torch.Tensor): [N, S] (optional)Update:data (dict): {'b_ids' (torch.Tensor): [M'],'i_ids' (torch.Tensor): [M'],'j_ids' (torch.Tensor): [M'],'gt_mask' (torch.Tensor): [M'],'mkpts0_c' (torch.Tensor): [M, 2],'mkpts1_c' (torch.Tensor): [M, 2],'mconf' (torch.Tensor): [M]}NOTE: M' != M during training."""N, L, S, C = feat_c0.size(0), feat_c0.size(1), feat_c1.size(1), feat_c0.size(2)# normalizefeat_c0, feat_c1 = map(lambda feat: feat / feat.shape[-1]**.5,[feat_c0, feat_c1])if self.match_type == 'dual_softmax':sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0,feat_c1) / self.temperatureprint(sim_matrix.shape)if mask_c0 is not None:sim_matrix.masked_fill_(~(mask_c0[..., None] * mask_c1[:, None]).bool(),-INF)conf_matrix = F.softmax(sim_matrix, 1) * F.softmax(sim_matrix, 2)print(conf_matrix.shape)elif self.match_type == 'sinkhorn':# sinkhorn, dustbin includedsim_matrix = torch.einsum("nlc,nsc->nls", feat_c0, feat_c1)if mask_c0 is not None:sim_matrix[:, :L, :S].masked_fill_(~(mask_c0[..., None] * mask_c1[:, None]).bool(),-INF)# build uniform prior & use sinkhornlog_assign_matrix = self.log_optimal_transport(sim_matrix, self.bin_score, self.skh_iters)assign_matrix = log_assign_matrix.exp()conf_matrix = assign_matrix[:, :-1, :-1]# filter prediction with dustbin score (only in evaluation mode)if not self.training and self.skh_prefilter:filter0 = (assign_matrix.max(dim=2)[1] == S)[:, :-1] # [N, L]filter1 = (assign_matrix.max(dim=1)[1] == L)[:, :-1] # [N, S]conf_matrix[filter0[..., None].repeat(1, 1, S)] = 0conf_matrix[filter1[:, None].repeat(1, L, 1)] = 0if self.config['sparse_spvs']:data.update({'conf_matrix_with_bin': assign_matrix.clone()})data.update({'conf_matrix': conf_matrix})# predict coarse matches from conf_matrixdata.update(**self.get_coarse_match(conf_matrix, data))跟入get_coarse_match模块
通过softmax获取到概率值之后,然后根据阈值使用mask矩阵过滤掉低于阈值的值,然后使用互最近邻来确定互相匹配关系。
def get_coarse_match(self, conf_matrix, data):"""Args:conf_matrix (torch.Tensor): [N, L, S]data (dict): with keys ['hw0_i', 'hw1_i', 'hw0_c', 'hw1_c']Returns:coarse_matches (dict): {'b_ids' (torch.Tensor): [M'],'i_ids' (torch.Tensor): [M'],'j_ids' (torch.Tensor): [M'],'gt_mask' (torch.Tensor): [M'],'m_bids' (torch.Tensor): [M],'mkpts0_c' (torch.Tensor): [M, 2],'mkpts1_c' (torch.Tensor): [M, 2],'mconf' (torch.Tensor): [M]}"""axes_lengths = {'h0c': data['hw0_c'][0],'w0c': data['hw0_c'][1],'h1c': data['hw1_c'][0],'w1c': data['hw1_c'][1]}_device = conf_matrix.device# 1. confidence thresholdingmask = conf_matrix > self.thrprint(mask.shape)mask = rearrange(mask, 'b (h0c w0c) (h1c w1c) -> b h0c w0c h1c w1c',**axes_lengths)print(mask.shape)if 'mask0' not in data:mask_border(mask, self.border_rm, False)else:mask_border_with_padding(mask, self.border_rm, False,data['mask0'], data['mask1'])mask = rearrange(mask, 'b h0c w0c h1c w1c -> b (h0c w0c) (h1c w1c)',**axes_lengths)print(mask.shape)# 2. mutual nearestprint(conf_matrix.max(dim=2, keepdim=True)[0].shape)mask = mask \* (conf_matrix == conf_matrix.max(dim=2, keepdim=True)[0]) \* (conf_matrix == conf_matrix.max(dim=1, keepdim=True)[0])print(mask.shape)# 3. find all valid coarse matches# this only works when at most one `True` in each rowmask_v, all_j_ids = mask.max(dim=2)print(mask_v.shape)print(all_j_ids.shape)b_ids, i_ids = torch.where(mask_v)print(b_ids.shape)print(i_ids.shape)j_ids = all_j_ids[b_ids, i_ids]print(j_ids.shape)mconf = conf_matrix[b_ids, i_ids, j_ids]print(mconf.shape)# 4. Random sampling of training samples for fine-level LoFTR# (optional) pad samples with gt coarse-level matchesif self.training:# NOTE:# The sampling is performed across all pairs in a batch without manually balancing# #samples for fine-level increases w.r.t. batch_sizeif 'mask0' not in data:num_candidates_max = mask.size(0) * max(mask.size(1), mask.size(2))else:num_candidates_max = compute_max_candidates(data['mask0'], data['mask1'])num_matches_train = int(num_candidates_max *self.train_coarse_percent)num_matches_pred = len(b_ids)assert self.train_pad_num_gt_min < num_matches_train, "min-num-gt-pad should be less than num-train-matches"# pred_indices is to select from predictionif num_matches_pred <= num_matches_train - self.train_pad_num_gt_min:pred_indices = torch.arange(num_matches_pred, device=_device)else:pred_indices = torch.randint(num_matches_pred,(num_matches_train - self.train_pad_num_gt_min, ),device=_device)# gt_pad_indices is to select from gt padding. e.g. max(3787-4800, 200)gt_pad_indices = torch.randint(len(data['spv_b_ids']),(max(num_matches_train - num_matches_pred,self.train_pad_num_gt_min), ),device=_device)mconf_gt = torch.zeros(len(data['spv_b_ids']), device=_device) # set conf of gt paddings to all zerob_ids, i_ids, j_ids, mconf = map(lambda x, y: torch.cat([x[pred_indices], y[gt_pad_indices]],dim=0),*zip([b_ids, data['spv_b_ids']], [i_ids, data['spv_i_ids']],[j_ids, data['spv_j_ids']], [mconf, mconf_gt]))# These matches select patches that feed into fine-level networkcoarse_matches = {'b_ids': b_ids, 'i_ids': i_ids, 'j_ids': j_ids}# 4. Update with matches in original image resolutionscale = data['hw0_i'][0] / data['hw0_c'][0]scale0 = scale * data['scale0'][b_ids] if 'scale0' in data else scalescale1 = scale * data['scale1'][b_ids] if 'scale1' in data else scalemkpts0_c = torch.stack([i_ids % data['hw0_c'][1], i_ids // data['hw0_c'][1]],dim=1) * scale0mkpts1_c = torch.stack([j_ids % data['hw1_c'][1], j_ids // data['hw1_c'][1]],dim=1) * scale1# These matches is the current prediction (for visualization)coarse_matches.update({'gt_mask': mconf == 0,'m_bids': b_ids[mconf != 0], # mconf == 0 => gt matches'mkpts0_c': mkpts0_c[mconf != 0],'mkpts1_c': mkpts1_c[mconf != 0],'mconf': mconf[mconf != 0]})return coarse_matches精细化调整 fine-level refinement
# 4. fine-level refinement# 预处理操作,拆解特征图,提取匹配到的候选点feat_f0_unfold, feat_f1_unfold = self.fine_preprocess(feat_f0, feat_f1, feat_c0, feat_c1, data)if feat_f0_unfold.size(0) != 0: # at least one coarse level predictedfeat_f0_unfold, feat_f1_unfold = self.loftr_fine(feat_f0_unfold, feat_f1_unfold)细粒度匹配 match fine-level
跳入FineMatching的forward函数中
原文中使用55的矩阵进行细粒度匹配,这里匹配的时候会计算55矩阵中各个点与中间点的关系,生成热度图heatmap,然后计算这个热度图的期望dsnt.spatial_expectation2d,然后还原到图像中即可。
def forward(self, feat_f0, feat_f1, data):"""Args:feat0 (torch.Tensor): [M, WW, C]feat1 (torch.Tensor): [M, WW, C]data (dict)Update:data (dict):{'expec_f' (torch.Tensor): [M, 3],'mkpts0_f' (torch.Tensor): [M, 2],'mkpts1_f' (torch.Tensor): [M, 2]}"""M, WW, C = feat_f0.shapeW = int(math.sqrt(WW))scale = data['hw0_i'][0] / data['hw0_f'][0]self.M, self.W, self.WW, self.C, self.scale = M, W, WW, C, scale# corner case: if no coarse matches foundif M == 0:assert self.training == False, "M is always >0, when training, see coarse_matching.py"# logger.warning('No matches found in coarse-level.')data.update({'expec_f': torch.empty(0, 3, device=feat_f0.device),'mkpts0_f': data['mkpts0_c'],'mkpts1_f': data['mkpts1_c'],})returnfeat_f0_picked = feat_f0_picked = feat_f0[:, WW//2, :]print(feat_f0_picked.shape)sim_matrix = torch.einsum('mc,mrc->mr', feat_f0_picked, feat_f1)print(sim_matrix.shape)softmax_temp = 1. / C**.5heatmap = torch.softmax(softmax_temp * sim_matrix, dim=1).view(-1, W, W)print(heatmap.shape)# compute coordinates from heatmapcoords_normalized = dsnt.spatial_expectation2d(heatmap[None], True)[0] # [M, 2]print(coords_normalized.shape)grid_normalized = create_meshgrid(W, W, True, heatmap.device).reshape(1, -1, 2) # [1, WW, 2]print(grid_normalized.shape)# compute std over <x, y>var = torch.sum(grid_normalized**2 * heatmap.view(-1, WW, 1), dim=1) - coords_normalized**2 # [M, 2]std = torch.sum(torch.sqrt(torch.clamp(var, min=1e-10)), -1) # [M] clamp needed for numerical stability# for fine-level supervisiondata.update({'expec_f': torch.cat([coords_normalized, std.unsqueeze(1)], -1)})# compute absolute kpt coordsself.get_fine_match(coords_normalized, data)总结
本周我阅读了LoFTR方法,该方法为局部图像特征匹配领域带来了一种新颖的思路。传统的图像特征匹配流程通常包括特征检测、特征描述和特征匹配三个独立阶段。然而,LoFTR打破了这一传统框架,通过结合Transformer架构,直接在像素级别上建立粗匹配,并随后在精细级别上优化这些匹配。下一周我将开始EfficientLoFTR的学习。
相关文章:
机器学习周报第41周
目录 摘要Abstract一、文献阅读1.1 摘要1.2 背景1.3 论文方法1.3.1 局部特征提取1.3.2 局部特征转换器 (LoFTR) 模块1.3.4 建立粗粒度匹配1.3.5 精细匹配 1.4 损失1.5 实现细节1.6 实验1.6.1 单应性估计1.6.2 相对位姿估计 二、论文代码总结 摘要 本周阅读了一篇特征匹配领域的…...

gin框架学习笔记(三) ——路由请求与相关参数
参数种类与参数处理 查询参数 在讲解查询参数的定义之前,我们先来看一个例子,当我打开了CSDN,我现在想查看我的博客浏览量,那么我就需要点击我的头像来打开我的个人主页,像下面这样: 我们现在把浏览器的网址取下来,…...
)
HTML常用标签-多媒体标签(图片、音频、视频)
多媒体标签 1 图片标签2 音频标签3 视频标签 1 图片标签 img(重点) 图片标签,用于在页面上引入图片 代码 <!-- src用于定义图片的连接 title用于定义鼠标悬停时显示的文字 alt用于定义图片加载失败时显示的提示文字 --> <img src"路径" title"悬停显…...

Flutter 中的 AnimatedIcon 小部件:全面指南
Flutter 中的 AnimatedIcon 小部件:全面指南 AnimatedIcon是Flutter Material组件库中的一个独特动画组件,它允许开发者在两个图标之间进行平滑的过渡动画。这使得它非常适合用于表示应用程序的状态变化,如菜单打开/关闭、搜索打开/关闭等。…...

0510Goods的Maven项目
0510Goods的Maven项目包-CSDN博客 数据库字段 商品主页 修改页面 点击商品主页更改信息, 跳转到修改页面, 并保留初始信息。 商品类别最多选取三项,最少选取一项 添加界面 商品类别最多选取三项,最少选取一项...

使用Pyramid、Mako和PyJade生成 HTML
Pyramid 是一个流行的 Python Web 框架,而 Mako 和 PyJade 是用于模板引擎的工具,它们可以与 Pyramid 配合使用来生成 HTML 内容。但是在实际使用中还是有些差别的,尤其会遇到各种各样的问题,下面我将利用我所学的知识一一为大家解…...

什么是Facebook付费广告营销?
Facebook作为全球最大的社交平台之一,成为了跨境卖家不可或缺的营销阵地。它不仅拥有庞大的用户基数,还提供了丰富的广告工具和社群互动功能,让商家能够精准触达目标市场,提升品牌影响力。云衔科技通过Facebook付费广告营销的专业…...
面对.halo勒索病毒,如何有效防范与应对?
导言: 随着网络技术的不断发展,网络安全问题也日益凸显。其中,勒索病毒作为一种极具破坏性的网络攻击手段,近年来在全球范围内频发。其中,.halo勒索病毒作为勒索病毒家族中的一员,其危害性和传播性不容忽视…...
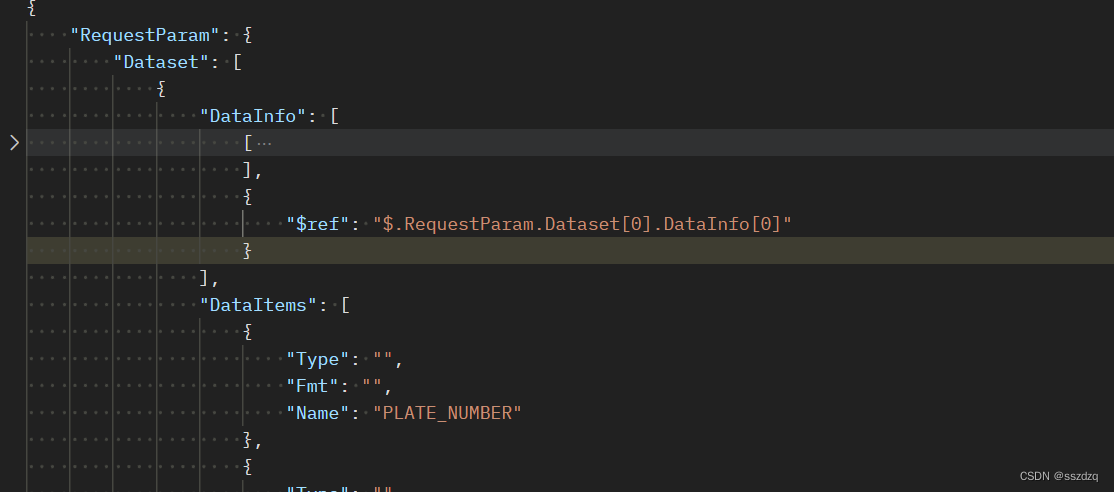
JSON 转为json串后出现 “$ref“
问题描述 转为JSON 串时出现 "$ref":"$.RequestParam.list[0]" $ref: fastjson数据重复的部分会用引用代替,当一个对象包含另一个对象时,fastjson就会把该对象解析成引用 “$ref”:”..” 上一级 “$ref”:”” 当前对…...

Nachi那智不二越机器人维修技术合集
一、Nachi机械手维护基础知识 1. 定期检查:定期检查机器人的各个部件,如机械手伺服电机、机器人减速器、机械臂传感器等,确保其运行正常。 2. 清洁与润滑:定期清洁Nachi工业机器人表面和内部,并使用合适的润滑油进行润…...
C++类与对象基础探秘系列(二)
目录 类的6个默认成员函数 构造函数 构造函数的概念 构造函数的特性 析构函数 析构函数的概念 析构函数的特性 拷贝构造函数 拷贝构造函数的概念 拷贝构造函数的特性 赋值运算符重载 运算符重载 赋值运算符重载 const成员 const修饰类的成员函数 取地址及const取地址操作…...
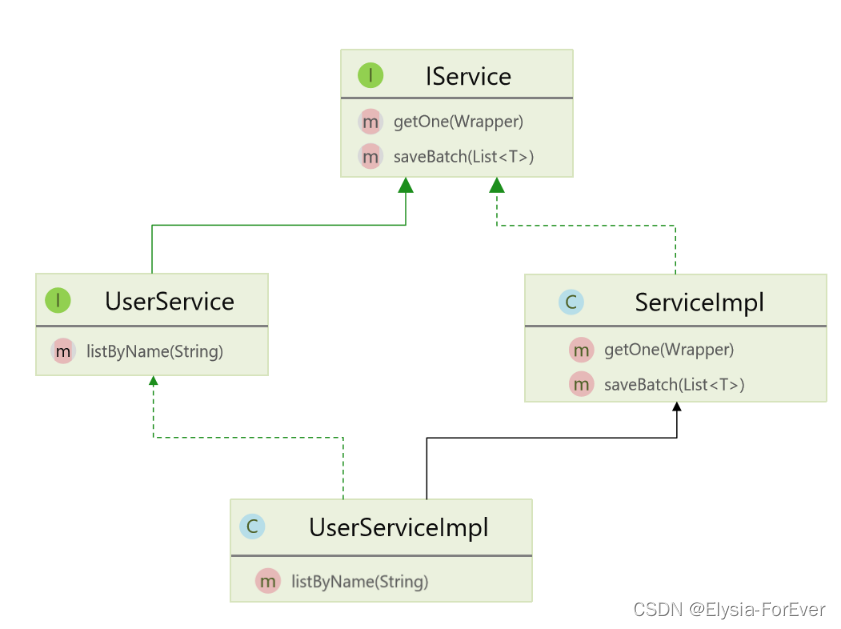
MyBatis-Plus核心功能详解:条件构造器、自定义SQL与Service接口
在Java的Web开发中,MyBatis-Plus作为MyBatis的增强工具,提供了许多实用的功能,极大地简化了数据库操作的开发过程。下面,我们将详细探讨MyBatis-Plus的三大核心功能:条件构造器、自定义SQL以及Service接口。 一、条件…...

莆田市C++专项选拔第二轮题4
题4:变换阵型 【题目描述】 盛隆同学刚学完C的二维数组和函数部分,于是他自己写了2个函数对二维数组进行练习。两个函数如下: int n, a[1005][1005]; // 注意,这里的n和数组a是全局变量 void f1() {for (int i 1; i < n; i)…...

AtCoder Regular Contest 177
A - Excange 题意 用这些零钱能否不找零地买这些物品 思路 因为 500 5 100 10 50 50 10 500 1 5005\times 10010\times 5050\times 10500\times 1 5005100105050105001。 所以说,我们这道题可以采用贪心算法,优先取大的减去目前零钱最大的…...
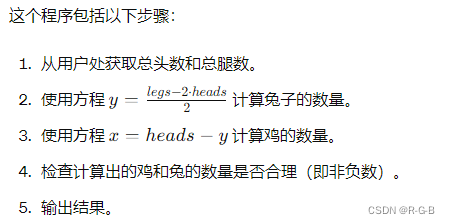
【C++】 C++ 编写 鸡兔同笼程序
文章目录 “鸡兔同笼”问题是一个经典的数学问题,要求根据总头数和总腿数来计算鸡和兔的数量。假设鸡有 2 条腿,兔有 4 条腿。可以通过以下步骤求解这个问题: 1 .设鸡的数量为 x,兔的数量为 y。2.根据题意,我们有以下…...

[动画详解]LeetCode151.翻转字符串里的单词
💖💖💖欢迎来到我的博客,我是anmory💖💖💖 又和大家见面了 欢迎来到动画详解LeetCode算法系列 用通俗易懂的动画让算法题不再神秘 先来自我推荐一波 个人网站欢迎访问以及捐款 推荐阅读 如何低成…...
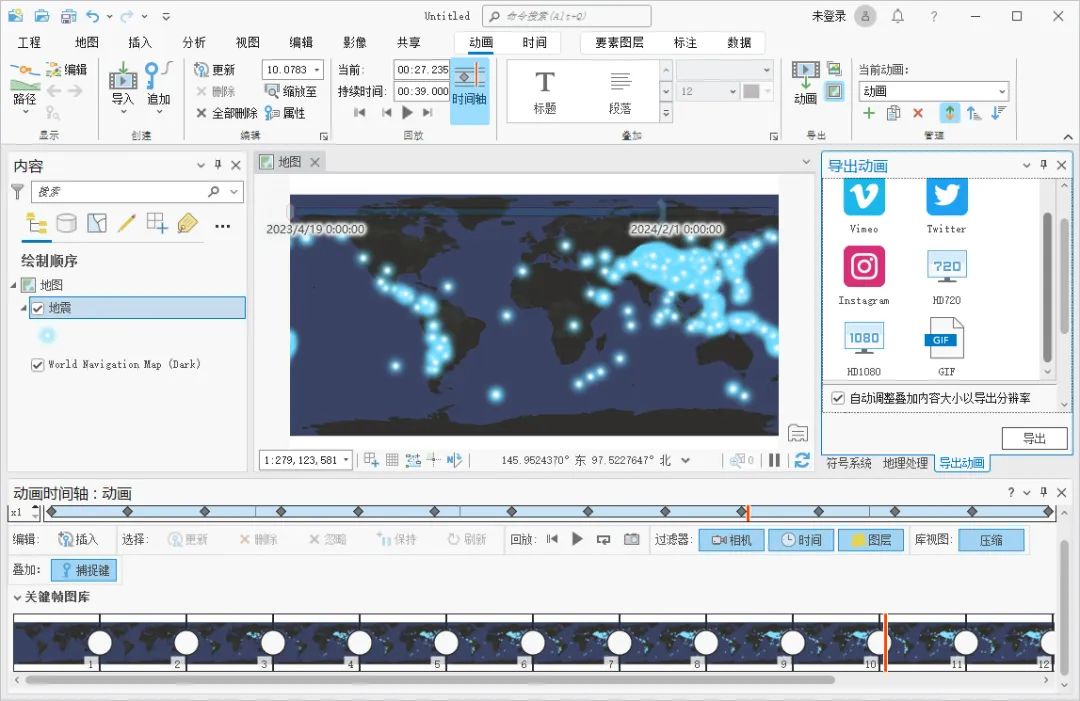
如何使用 ArcGIS Pro 制作地震动画
在做某些汇报的时候,除了图文,如果有动画肯定会成为加分项,这里为大家介绍一下如何使用 ArcGIS Pro 制作地震动画,希望能对你有所帮助。 添加时间 在图层属性内,选择时间选项卡,图层时间选择每个要素具有…...

Unity 初步了解
1.Unity 是啥 Unity是一个实时3D互动内容创作和运营平台。它可以帮助游戏开发、美术、建筑、汽车设计、影视等行业的创作者将创意变为现实。Unity平台提供了一套完善的软件解决方案,用于创作、运营和变现任何实时互动的2D和3D内容,支持的平台包括手机、…...
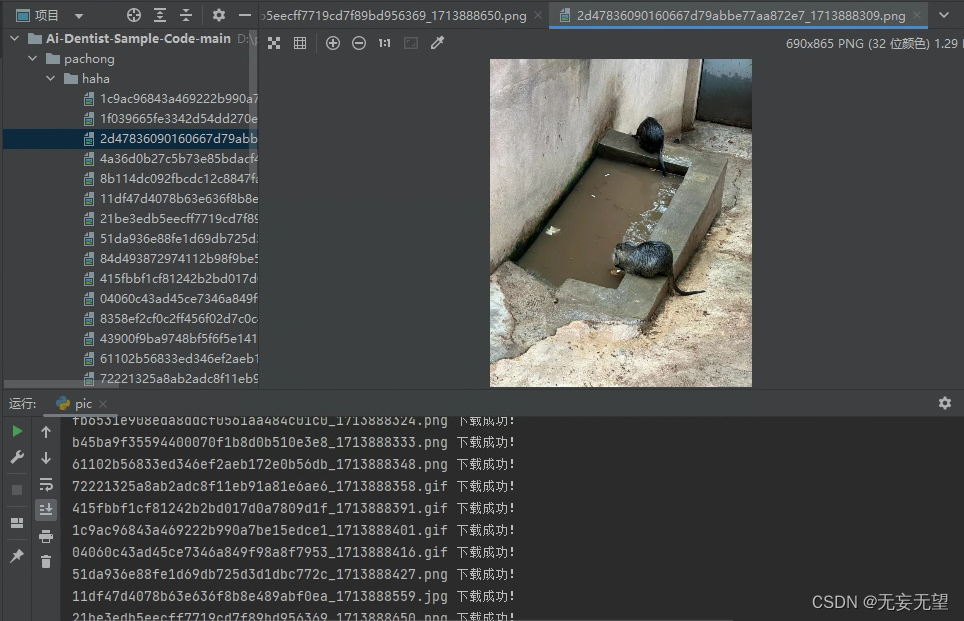
爬虫学习(4)每日一笑
代码 import requests import re import osif __name__ "__main__":if not os.path.exists("./haha"):os.makedirs(./haha)url https://mlol.qt.qq.com/go/mlol_news/varcache_article?docid6321992422382570537&gameid3&zoneplat&webview…...

生产环境节点扩容方案
datanode节点扩缩容(1人天) 注意:新增节点需要走商务,节点扩容需要申请新的license 制品包下载 #内网下载(环境检查脚本) wget --user=admin --password=Y!bC2hx0TN@21cal http://10.69.71.180:8082/artifactory/product/qiudongyang/precheck/os-check20221127.tar…...

BabelDOC终极指南:三步解决PDF翻译格式错乱难题
BabelDOC终极指南:三步解决PDF翻译格式错乱难题 【免费下载链接】BabelDOC Yet Another Document Translator 项目地址: https://gitcode.com/GitHub_Trending/ba/BabelDOC 还在为PDF文档翻译后格式混乱而烦恼吗?BabelDOC作为专业的PDF文档翻译工…...

Omnizart代码实现原理:解密音乐AI背后的深度学习算法
Omnizart代码实现原理:解密音乐AI背后的深度学习算法 【免费下载链接】omnizart Omniscient Mozart, being able to transcribe everything in the music, including vocal, drum, chord, beat, instruments, and more. 项目地址: https://gitcode.com/gh_mirrors…...

UV-UI终极指南:如何在30分钟内构建跨平台应用
UV-UI终极指南:如何在30分钟内构建跨平台应用 【免费下载链接】uv-ui uv-ui 破釜沉舟之兼容vue32、app、h5、小程序等多端基于uni-app和uView2.x的生态框架,支持单独导入,开箱即用,利剑出击。 项目地址: https://gitcode.com/gh…...

从怀疑到真香!2026我整理直播内容总结只留下这一款好用工具
上周刚开完3小时的季度评审会,老板散会前说“下班前把整理好的纪要发我”,我抱着电脑坐在位置上,对着三小时录音头都大——逐句听改错别字一下午就没了;之前做用户访谈,受访者一口西南官话,换了三个工具识别…...

告别繁琐操作:Super IO插件实现Blender批量导入导出智能化解决方案
告别繁琐操作:Super IO插件实现Blender批量导入导出智能化解决方案 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io 在3D建模工作流中,最耗时的往往不是创意设计…...
)
告别明文传输!手把手教你用JS+国密SM2加密登录密码(附C#/Java后端解密代码)
国密SM2算法实战:从JS前端加密到C#/Java后端解密的完整指南 在当今数字化时代,Web应用安全已成为开发者不可忽视的重要课题。每次登录、每次数据传输都可能成为潜在的安全漏洞,特别是当敏感信息如用户密码以明文形式在网络中传输时。作为开发…...

如何永久保存你的数字记忆:WeChatMsg终极免费指南与AI相册创新
如何永久保存你的数字记忆:WeChatMsg终极免费指南与AI相册创新 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/…...

手把手图解:用Wireshark抓个包,带你‘看见’一次IMS注册和SIP会话的全过程
手把手图解:用Wireshark抓个包,带你‘看见’一次IMS注册和SIP会话的全过程 通信工程师的日常工作中,最令人着迷的莫过于将抽象的网络协议转化为可视化的数据流。当终端设备向IMS核心网发起注册并建立语音会话时,背后究竟发生了什么…...

网易云音乐FLAC无损下载工具:3步轻松获取专业级音质
网易云音乐FLAC无损下载工具:3步轻松获取专业级音质 【免费下载链接】NeteaseCloudMusicFlac 根据网易云音乐的歌单, 下载flac无损音乐到本地.。 项目地址: https://gitcode.com/gh_mirrors/nete/NeteaseCloudMusicFlac 还在为在线音乐平台的音质限制而烦恼吗…...

OpenHarmony 5.0.3兼容性认证实战:BQ3576HM开发板全栈移植与调优
1. 项目概述:一次关键的“兼容性认证”实战最近,我们团队基于贝启科技的BQ3576HM开发板套件,成功通过了OpenHarmony 5.0.3 Release版本的兼容性测评。这听起来像是一个简单的“通过测试”的新闻,但对于真正在一线做OpenHarmony设备…...