机器人工具箱学习(三)
一、动力学方程
机器人的动力学公式描述如下:

式中, τ \boldsymbol{\tau} τ表示关节驱动力矩矢量; q , q ˙ , q ¨ \boldsymbol{q} ,\; \dot{\boldsymbol { q }} ,\; \ddot{\boldsymbol { q }} q,q˙,q¨分别为广义的关节位置、速度和加速度; M \boldsymbol{M} M为关节的空间惯量矩阵; C \boldsymbol{C} C为科氏力和离心力耦合矩阵; G \boldsymbol{G} G为重力; F f \boldsymbol{F}_f Ff为关节摩擦力。
机器人的动力学参数包括惯性参数和摩擦参数。
(1)惯性参数有:连杆质量 m m m、相对于连杆坐标系的质心矢量 r \boldsymbol{r} r和转动惯量矩阵 I \boldsymbol{I} I。其中,质心矢量 r \boldsymbol{r} r可以表示为:

式中, r x r_x rx、 r y r_y ry和 r z r_z rz分别表示质心矢量 r \boldsymbol{r} r在连杆坐标系下三个坐标轴的分量。转动惯量矩阵 I \boldsymbol{I} I为包含六个独立元素的二维矩阵,表示为:

式中,主对角元素为惯性矩,非主对角元素为惯性积。
(2)机器人动力学建模中常用的摩擦模型为库伦-粘滞摩擦模型,其表达式为:

式中, f c f_c fc和 f v f_v fv分别表示库伦摩擦系数和粘滞摩擦系数; v v v表示关节速度。注意:对于库伦摩擦系数的处理不同人有不同的处理,有的地方认为库伦摩擦是对称的,即当机器人关节正向旋转和反向旋转时,库伦摩擦力大小相等,方向相反,也即 f c + = f c − f_c^+ = f_c^- fc+=fc−;也有的地方认为库伦摩擦是非对称的,即当机器人关节正向旋转和反向旋转时,库伦摩擦力大小不相等。
二、机器人工具箱描述动力学方程
2.1 动力学参数赋值
在机器人工具箱中,提供了如下动力学参数输入接口:
(1)Link.m:表示连杆的质量;
(2)Link.r:表示连杆的质心矢量;
(3)Link.I:表示连杆的惯量矩阵;
(4)Link.Jm:表示驱动电机的转动惯量;
(5)Link.B:表示粘滞摩擦系数;
(6)Link.Tc:表示库伦摩擦系数;
(7)Link.G:表示电机齿轮传动比(默认为1)
这里仍然以3-DOF平面机械臂为例:
%% 动力学
% RRR机械臂
clear;
close all;
clc;% theta(z) d(z) a(x) alpha(x)
RRR_L(1) = Link([ 0 0 1 0 ],'standard');
RRR_L(2) = Link([ 0 0 0.8 0 ],'standard');
RRR_L(3) = Link([ 0 0 0.6 0 ],'standard');% 连杆1动力学参数
RRR_L(1).m = 4.0;
RRR_L(1).r = [0.12; 0.08; 0.31];
RRR_L(1).I = [0.32 0.01 0.02;0.01 0.12 0.11;0.02 0.11 0.41];
RRR_L(1).Jm = 0.0012;
RRR_L(1).B = 0.00148;
RRR_L(1).Tc = [+0.395, -0.435];
RRR_L(1).G = 1.2;% 连杆2动力学参数
RRR_L(2).m = 15.2;
RRR_L(2).r = [-0.475; 0.097; 0.06];
RRR_L(2).I = [1.21 0.21 0.32;0.21 0.52 0.11;0.32 0.11 0.51];
RRR_L(2).Jm = 0.0048;
RRR_L(2).B = 0.00329;
RRR_L(2).Tc = [+0.462; -0.561];
RRR_L(2).G = 1.4;% 连杆3动力学参数
RRR_L(3).m = 0.6;
RRR_L(3).r = [0.01; 0.097; 0.016];
RRR_L(3).I = [0.021 0.03 0.382;0.03 0.152 0.11;0.382 0.11 0.651];
RRR_L(3).Jm = 0.0061;
RRR_L(3).B = 0.00429;
RRR_L(3).Tc = [+0.262; -0.661];
RRR_L(3).G = 1.7;three_link = SerialLink(RRR_L, 'name', '3-DOF');
采用dyn( )函数可以查看动力学参数,如图所示:



2.2 动力学方程中的各项表示
(1)空间惯量矩阵 M ( q ) \boldsymbol{M}(\boldsymbol{q}) M(q)
机器人的空间惯量是机器人各关节的位姿的函数,在不同机器人位形时具有不同的值。机器人工具箱中可以调用robot.inertia(q)函数获得空间惯量矩阵。
例如:当3-DOF平面机械臂三个关节角度为30°、45°和60°时,其空间惯量矩阵为:

(2)科氏力和离心力耦合矩阵 C ( q , q ˙ ) \boldsymbol{C}(\boldsymbol{q},\dot{\boldsymbol{q}}) C(q,q˙)
科氏力和离心力耦合矩阵是关节位置和速度的函数。机器人工具箱中可以调用robot.coriolis(q, qd)函数获得该耦合矩阵。
例如:当3-DOF平面机械臂三个关节角度为30°、45°和60°,三个关节速度为10°/s、20°/s和30°/s时,其科氏力和离心力耦合矩阵为:

(3)重力矩阵 G ( q ) \boldsymbol{G}(\boldsymbol{q}) G(q)
重力矩阵与机器人的位形有关,是对各关节所受重力的描述,其值不受机器人的运动的影响。机器人工具箱中可以调用robot.gravload(q, grav)函数来获得重力矩阵,其中grav自定义重力加速度向量。
例如:当3-DOF平面机械臂三个关节角度为30°、45°和60°,重力加速度向量为 y y y轴负向,即grav = [0; -9.8; 0]。重力矩阵为:

(4)摩擦力矩阵 F f ( q ˙ ) \boldsymbol{F}_f(\dot{\boldsymbol{q}}) Ff(q˙)
摩擦力矩阵是由各关节的给定摩擦参数数值决定的,大小与各关节的速度有关。机器人工具箱中可以调用robot.friction(qd)函数来获得重力矩阵。
例如:当3-DOF平面机械臂三个关节速度为10°/s、20°/s和30°/s时,其摩擦力矩阵为:

三、逆动力学分析
机器人的逆动力学分析是在给定机器人关节位置、速度和加速度时,计算得到机器人各关节所需要的力和力矩大小。机器人工具箱中可以调用robot.rne(q, qd, qdd, grav)函数来计算逆动力学。其中,q, qd, qdd分别表示机器人关节位置、速度和加速度;grav表示自定义的重力加速度矢量。除此之外,还可以添加参数fext,表示末端执行器受到的外力和力矩 [ F x , F y , F z , τ x , τ y , τ z ] [F_x,\: F_y,\: F_z,\: \tau_x,\: \tau_y,\: \tau_z] [Fx,Fy,Fz,τx,τy,τz]
例子:让3-DOF平面机械臂按照下图所示的轨迹运动。

代码:
%% 动力学
% RRR机械臂
clear;
close all;
clc;% theta(z) d(z) a(x) alpha(x)
RRR_L(1) = Link([ 0 0 1 0 ],'standard');
RRR_L(2) = Link([ 0 0 0.8 0 ],'standard');
RRR_L(3) = Link([ 0 0 0.6 0 ],'standard');% 连杆1动力学参数
RRR_L(1).m = 4.0;
RRR_L(1).r = [0.12; 0.08; 0.31];
RRR_L(1).I = [0.32 0.01 0.02;0.01 0.12 0.11;0.02 0.11 0.41];
RRR_L(1).Jm = 0.0012;
RRR_L(1).B = 0.00148;
RRR_L(1).Tc = [+0.395, -0.435];
RRR_L(1).G = 1.2;% 连杆2动力学参数
RRR_L(2).m = 15.2;
RRR_L(2).r = [-0.475; 0.097; 0.06];
RRR_L(2).I = [1.21 0.21 0.32;0.21 0.52 0.11;0.32 0.11 0.51];
RRR_L(2).Jm = 0.0048;
RRR_L(2).B = 0.00329;
RRR_L(2).Tc = [+0.462; -0.561];
RRR_L(2).G = 1.4;% 连杆3动力学参数
RRR_L(3).m = 5.6;
RRR_L(3).r = [0.01; 0.097; 0.016];
RRR_L(3).I = [0.921 0.03 0.382;0.03 0.252 0.11;0.382 0.11 1.251];
RRR_L(3).Jm = 0.0061;
RRR_L(3).B = 0.00429;
RRR_L(3).Tc = [+0.262; -0.661];
RRR_L(3).G = 1.7;three_link = SerialLink(RRR_L, 'name', '3-DOF');delta_t = 0.02;
t = 0:delta_t:4;
m = length(t);theta1 = 60*sin(4*pi*t/4);
theta2 = 60*sin(2*pi*t/4);
theta3 = 30*sin(2*pi*t/4);theta1_d = 60*pi*cos(4*pi*t/4);
theta2_d = 30*pi*cos(2*pi*t/4);
theta3_d = 15*pi*cos(2*pi*t/4);theta1_dd = -60*pi*pi*sin(4*pi*t/4);
theta2_dd = -15*pi*pi*sin(2*pi*t/4);
theta3_dd = -7.5*pi*pi*sin(2*pi*t/4);q = [theta1;theta2;theta3]'*pi/180;
qd = [theta1_d;theta2_d;theta3_d]'*pi/180;
qdd = [theta1_dd;theta2_dd;theta3_dd]'*pi/180;% 关节位置、速度、加速度绘图
figure(1)
subplot(3,1,1)
plot(t, q(:,1)*180/pi, 'b')
hold on
plot(t, q(:,2)*180/pi, 'r--')
hold on
plot(t, q(:,3)*180/pi, 'm')
xlabel('time (s)', 'Interpreter', 'latex')
ylabel('$\theta$ (deg)', 'Interpreter', 'latex')
legend('$\theta_1$','$\theta_2$','$\theta_3$', 'Interpreter', 'latex')
set(gca, 'FontName','Times New Roman')subplot(3,1,2)
plot(t, qd(:,1)*180/pi, 'b')
hold on
plot(t, qd(:,2)*180/pi, 'r--')
hold on
plot(t, qd(:,3)*180/pi, 'm')
xlabel('time (s)', 'Interpreter', 'latex')
ylabel('$\dot{\theta}$ (deg)', 'Interpreter', 'latex')
legend('$\dot{\theta_1}$','$\dot{\theta_2}$','$\dot{\theta_3}$', 'Interpreter', 'latex')
set(gca, 'FontName','Times New Roman')subplot(3,1,3)
plot(t, qdd(:,1)*180/pi, 'b')
hold on
plot(t, qdd(:,2)*180/pi, 'r--')
hold on
plot(t, qdd(:,3)*180/pi, 'm')
xlabel('time (s)', 'Interpreter', 'latex')
ylabel('$\ddot{\theta}$ (deg)', 'Interpreter', 'latex')
legend('$\ddot{\theta_1}$','$\ddot{\theta_2}$','$\ddot{\theta_3}$', 'Interpreter', 'latex')
set(gca, 'FontName','Times New Roman')set(gcf, 'color',[1 1 1]);% 运动示意
figure(2)
three_link.plot(q,'trail','b');% 逆动力学
grav = [0; -9.8; 0];
tau = three_link.rne(q, qd, qdd, grav);% 关节驱动力矩
figure(3)
plot(t,tau(:,1), 'b')
hold on
plot(t, tau(:,2), 'r--')
hold on
plot(t, tau(:,3), 'm')
xlabel('time (s)', 'Interpreter', 'latex')
ylabel('$\tau$ (N/m)', 'Interpreter', 'latex')
legend('$\tau_1$','$\tau_2$','$\tau_3$', 'Interpreter', 'latex')
set(gca, 'FontName','Times New Roman')
set(gcf, 'color',[1 1 1]);
运行结果:


四、结语
机器人工具箱还有其他的一些应用,譬如正动力学分析、视觉相关应用等,不过笔者对这些没有接触过,就不误导大家了。
我是木头人,以上全是个人见解,有问题请大家评论区指出,大家共同进步!!
相关文章:
机器人工具箱学习(三)
一、动力学方程 机器人的动力学公式描述如下: 式中, τ \boldsymbol{\tau} τ表示关节驱动力矩矢量; q , q ˙ , q \boldsymbol{q} ,\; \dot{\boldsymbol { q }} ,\; \ddot{\boldsymbol { q }} q,q˙,q分别为广义的关节位置、速度和加速…...

华为OD机试 - CPU算力分配(Java 2024 C卷 100分)
华为OD机试 2024C卷题库疯狂收录中,刷题点这里 专栏导读 本专栏收录于《华为OD机试(JAVA)真题(A卷B卷C卷)》。 刷的越多,抽中的概率越大,每一题都有详细的答题思路、详细的代码注释、样例测试…...
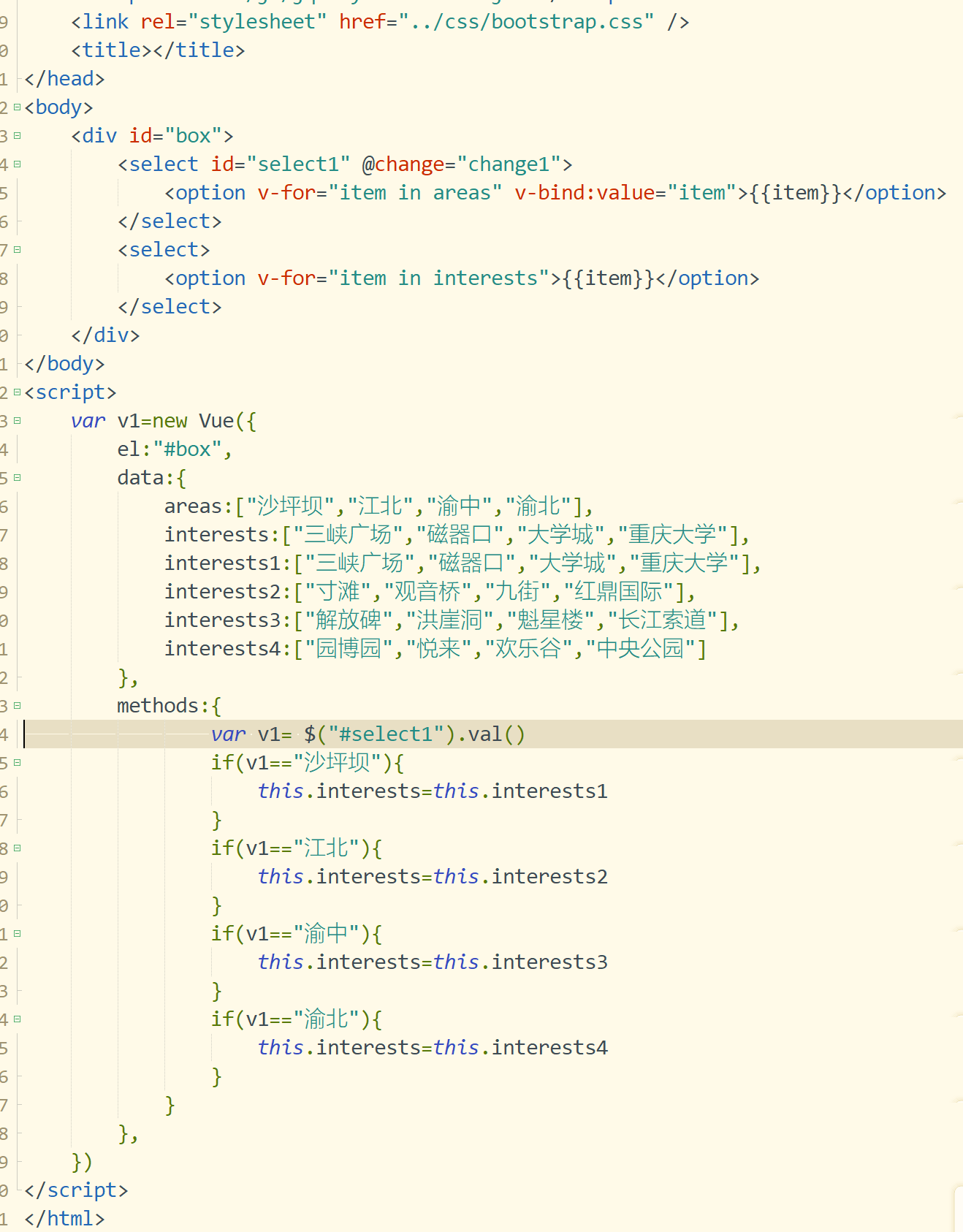
web前端框架设计第八课-表单控件绑定
web前端框架设计第八课-表单控件绑定 一.预习笔记 1.v-model实现表单数据双向绑定 2.搜索数据的实现 3.全选案例实现1—JQ方法 4.单选案例实现 5.数据级联(二级级联) 6.v-model中的修饰符 二.课堂笔记 三.课后回顾 –行动是治愈恐惧的良药,…...
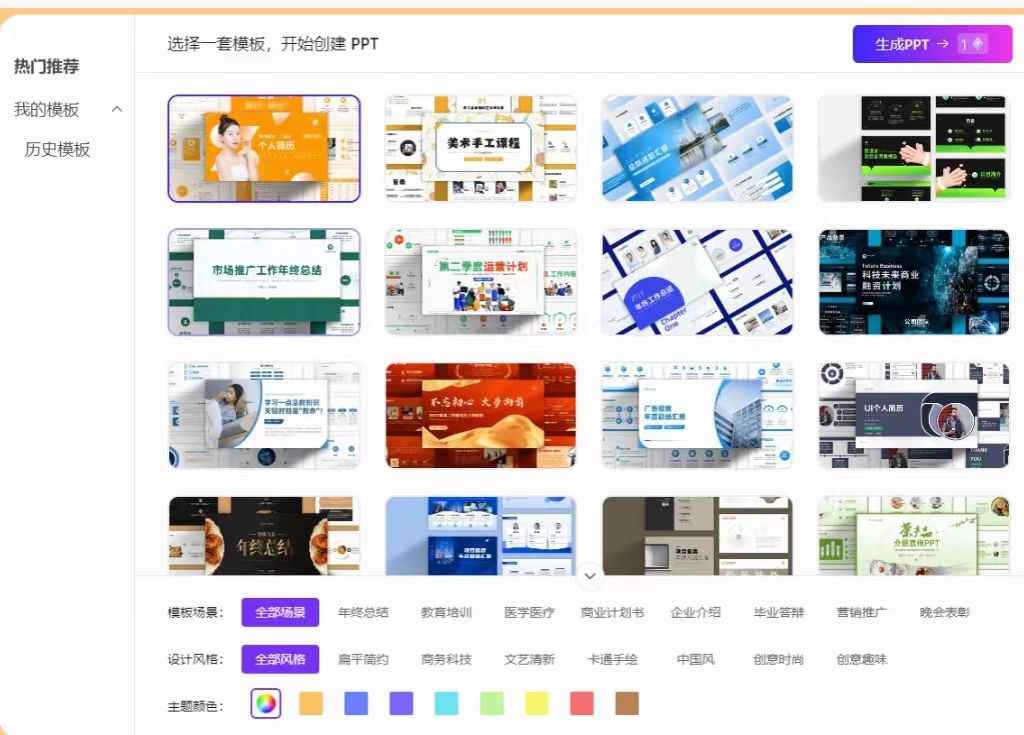
这三个网站我愿称之为制作答辩PPT的神
很多快要毕业的同学在做答辩PPT的时候总是感觉毫无思路,一窍不通。但这并不是你们的错,对于平时没接触过相关方面,第一次搞答辩PPT的人来说,这是很正常的一件事。一个好的答辩PPT可以根据以下分为以下几部分来写。 1.研究的背景和…...

flutter开发实战-实现多渠道打包及友盟统计(亲测有效)
flutter开发实战-实现多渠道打包及友盟统计(亲测有效) 最近开发过程中,需要引入友盟进行统计服务。友盟统计还需要区分不同渠道的打开应用的情况,所以需要处理多渠道打包的问题。 一、引入友盟统计 在工程的pubspec.yaml中引入…...
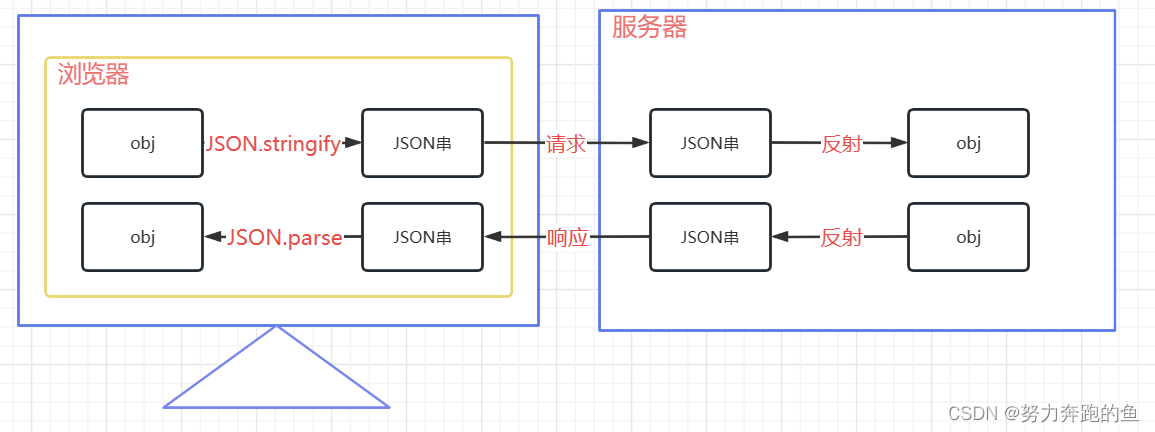
JavaScript-JSON对象
JSON格式 JSON(JavaScript Object Notation, JS对象简谱)是一种轻量级的数据交换格式。它基于ECMAScript(European Computer Manufacturers Association, 欧洲计算机协会的一个子集,采用完全独立于编程语言的文本格式来存储和表示…...

【C语言】自定义类型之---结构体超详解(结构体的定义使用、指针结构体,内存对齐,......代码详解)
目录 前言: 一:结构体 1.1:什么是结构体? 1.2:结构体类型的声明 1.3:结构体变量的定义 1.4:结构体的内存对齐 1.5:结构体传参 二:位段 2.1:位段是什…...

【完美恢复】修复计算机中丢失emp.dll的多个详细方法
最近,在尝试运行某款游戏时,我遭遇了一个令人头痛的问题——“emp.dll文件丢失”。这个错误通常意味着游戏的某个关键文件没有被正确加载或已损坏。以下是我解决问题的步骤和一些心得体会,希望对遇到类似问题的玩家们有所帮助。 emp.dll是一…...

暗黑4可以搬砖吗?暗黑4怎么搬砖 搬砖攻略
暗黑4可以搬砖吗?暗黑4怎么搬砖 搬砖攻略 暗黑破坏神4属于是暴雪旗下一款经典游戏IP,在全世界有着广泛的玩家群体,更是在今年暴雪国服宣布回归之后,吸引了一大批新玩家加入。今天小编就为大家带来暗黑4的详细搬砖教程。 现在我们…...

WLAN技术
冲突域:连接在同一传输线缆上的所有工作站的集合,或者说是同一物理网段上所有节点的集合共同竞争网络资源形成的域叫冲突域。 在OSI模型中,冲突域被看作是第一层的概念,连接同一冲突域的设备有中继器、集线器(hub&…...

维修AB罗克韦尔工控机 PanelView 900 2711-T9C8 SER C 触摸屏人机界面
可视化和 HMI 解决方案可帮助您满足生产力、创新和全球化需求。为电子操作员界面终端、分布式客户端/服务器 HMI 和信息软件提供了一致的外观和感觉。编程工具和高级软件应用程序包括远程访问和数据分析,可加速开发并提高效率。 图形终端 图形终端提供各种尺寸、操…...
)
334_C++_std::bind中使用shared_from_this()
std::bind(&HttpClient::getPwd, shared_from_this(), std::placeholders::_1, std::placeholders::_2);[ HttpClient继承自NetObj,NetObj是父类,NetObj受到std::shared_pt...

【Python】防御性编程入门
1. 前言 防御性编程指的是为了防止代码泄露后被竞品公司窃取技术,使用一种较高级的明文加密编程方式。也可以当做一种带解密性质的时间胶囊,锻炼程序员自己的记忆能力、读代码能力等。 2. 案例分析 2.1 import Import里面可以多取一些喜欢的名字&#…...

无线麦克风哪个品牌音质最好?热门无线麦克风品牌推荐
这段时间短视频行业兴起,很多人都开始尝试步入自媒体,不过想要自己的视频内容更出色、更吸引人,好的音频设备肯定是必不可少的,而麦克风就是其中的一种。麦克风的好坏也将决定了一个视频的质量与完整性等等,如果我们作…...

粒子奇观:用Processing创造宇宙级的动态效果
前言: 👋 今天,我们将一起探索宇宙的奥秘,不是在星空下,而是在Processing的代码世界中。这是我们的第八篇文章,我们将深入粒子系统的神奇领域,学习如何创造出令人惊叹的动态效果。 粒子系统:构建动态世界的基石 🔨 粒子系统是计算机图形学中用于模拟复杂自然现象…...

Filesystem Fragmentation on Modern Storage Systems——论文泛读
TOCS 2023 Paper 论文阅读笔记整理 问题 文件系统碎片是计算机系统随着时间的推移而变慢的主要原因之一。以前认为,碎片化对硬盘驱动器(HDD)等旋转存储设备有害,但不影响固态驱动器(SSD),因为…...
如何同步管理1000个设备的VLAN数据?
什么是VLAN? VLAN,也就是虚拟局域网,是通过为子网提供数据链路连接来抽象出局域网的概念。在企业网中,一个企业级交换机一般是24口或者是48口,连接这些接口的终端在物理上形成一个广播域。广播域过大,就会导…...

【谷粒商城】01-环境准备
1.下载和安装VirtualBox 地址:https://www.virtualbox.org/wiki/Downloads 傻瓜式安装VirtualBox 2.下载和安装Vagrant官方镜像 地址:https://app.vagrantup.com/boxes/search 傻瓜式安装 验证是否安装成功 打开CMD,输入vagrant命令,是否…...
2024深圳杯数学建模C题参考论文24页+完整代码数据解题
一、问题研究 24页参考论文: 【编译器识别】2024深圳杯C题24页参考论文1-3小问完整解题代码https://www.jdmm.cc/file/2710545/ 为了回答这些问题,我们需要进行一系列的编译实验、分析编译结果,并构建判别函数。以下是对这些问题的初步分析…...

用go语言写一个代码,加班就自动给老婆发信息,下班自动提醒的代码
文章推荐 1 作为程序员,开发用过最好用的AI工具有哪些? 2 Github Copilot正版的激活成功,终于可以chat了 3 idea,pycharm等的ai assistant已成功激活 4 新手如何拿捏 Github Copilot AI助手,帮助你提高写代码效率 5 Jetbrains的a…...

新手避坑指南:你的FPGA按键消抖仿真为什么和板子对不上?
FPGA按键消抖实战:从仿真完美到真实失效的深度排查手册 刚接触FPGA开发的工程师常会遇到一个诡异现象:按键消抖模块在ModelSim里跑得风生水起,波形干净漂亮,可一旦下载到开发板就各种失灵——要么按键没反应,要么按一次…...

2026年企微会话存档涨价后,怎么买最划算?
2026 年企业微信官方会话存档价格大幅上调,基础费用直接翻倍。不少依赖会话存档做合规、质检的企业,陷入了 “合规刚需不能丢,成本暴涨扛不住” 的两难。其实,放弃纯官方接口自研,转向高性价比第三方服务商,…...

JetBrains IDE试用期重置插件:简单三步恢复30天完整功能
JetBrains IDE试用期重置插件:简单三步恢复30天完整功能 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 还在为JetBrains IDE试用期到期而烦恼吗?ide-eval-resetter插件是你需要的终极解决…...

2026河北钢制防火门多少钱一平米?甲乙丙级最新报价
在建筑消防工程中,钢制防火门是厂房、小区、商场、地下室必不可少的消防设施。很多河北河间、任丘本地工程采购、施工方,最关心的就是钢制防火门最新平米价格。结合2026年河北消防建材市场行情,简单清晰讲解甲乙丙级钢制防火门市场价与选购要…...

荣耀MagicOS 10系统游戏模式:如何启用幻影稳帧功能并调整游戏画面的流畅度与画质平衡?
用手机玩游戏,最怕遇到卡顿和画面不清晰。想开高帧率保证流畅,画质就可能下降;想开高画质享受视觉盛宴,又容易掉帧卡顿。这真是让不少玩家头疼的问题。如果你的荣耀手机升级到了MagicOS 10系统,那么恭喜你,…...

LeetCode 找到最终的安全状态题解
LeetCode 找到最终的安全状态题解 题目描述 给定一个有向图,找到所有安全节点。安全节点是永远不会走向环的节点。 示例: 输入:graph [[1,2],[2,3],[5],[0],[5],[],[]]输出:[2,4,5,6] 解题思路 方法:拓扑排序 思路&am…...
)
Perplexity引用格式设置全链路解析(含BibTeX/CSL/DOI自动映射底层逻辑)
更多请点击: https://kaifayun.com 第一章:Perplexity引用格式设置全链路解析(含BibTeX/CSL/DOI自动映射底层逻辑) Perplexity 在学术写作支持中并非原生集成引文管理,但其底层可对接外部文献元数据服务,实…...
:使用指南)
One API 部署教程(下):使用指南
导读:前面两篇讲了本地和线上部署,现在 One API 已经跑起来了,接下来就是真正的使用环节! 理解核心概念 在开始之前,咱们先搞清楚几个关键概念,不然后面容易晕。 渠道(Channel):就是你的各个 AI 平台的 API Key。比如你有 DeepSeek 的 Key、OpenAI 的 Key、通义千问…...
信息收集)
CTFSHOW-WEB入门(1)信息收集
web1f12得到flagweb2虽然f12不能打开,但是curlU就直接开了得到flag也可以在url前面加个view-source,效果一样也可以通过浏览器打开开发者工具web3没思路的时候抓个包看看,可能会有意外收获得到flagweb4总有人把后台地址写入robots,…...

从KITTI的pkl文件到模型输入:OpenPCDet数据流水线内部运作全揭秘
从KITTI的pkl文件到模型输入:OpenPCDet数据流水线内部运作全揭秘 在3D目标检测领域,KITTI数据集作为行业标杆,其数据处理流程的复杂性往往成为算法落地的第一道门槛。OpenPCDet框架通过精心设计的预处理系统,将原始传感器数据转化…...