在RT-Thread下为MPU手搓以太网MAC驱动-3
文章目录
- MAC驱动支持不同的PHY芯片
- 关于对PHY设备抽象的改进
- RT-Thread下PHY设备抽象接口的改进
- 关于对PHY设备抽象的改进
这是个人驱动开发过程中做的一些记录,仅代表个人意见和理解,不喜勿喷
- MAC驱动需要支持不同的PHY芯片
MAC驱动支持不同的PHY芯片
关于对PHY设备抽象的改进
系列文章2中有提及到,在RT-Thread下定义的PHY操作抽象接口并不是很合理,比如你的系统里面有2个PHY的时候,你需要对每个PHY的操作接口做独立的实现,否则你无法根据当前read操作所传入的参数来区分当前操作的是哪个PHY设备:
先让我们来看下按照现有RT-Thread PHY抽象接口的定义,现在需要实现一个获取当前link状态的操作接口的实现,抽象接口的定义和具体实现如下:
rt_phy_status (*get_link_status)(rt_bool_t *status);
static rt_phy_status h3_kszplib_read(rt_uint32_t reg, rt_uint32_t *data)
{rt_mdio_t *mdio_bus = h3_kszdev0.rt_phydev.bus;rt_uint32_t device_id = h3_kszdev0.rt_phydev.addr;if (4 != mdio_bus->ops->read(mdio_bus, device_id,reg, (void *)data, 4)){return RT_FALSE;}return PHY_STATUS_OK;
}
static rt_phy_status h3_kszplib_linkstatus(rt_bool_t *status)
{rt_phy_status result;rt_uint32_t data;/* Read the basic status register. */result = h3_kszplib_read(MII_MSR, &data);RESULT_MATCH_CHECK(result, PHY_STATUS_FAIL, outs)if (!(MII_MSR_LINKSTATUS & data)){*status = RT_FALSE; /* link down. */}else{*status = RT_TRUE; /* link up. */}outs:return result;
}
那对于h3_kszplib_read接口函数来说,它就无法区分是哪个PHY设备实例来调用它去读取PHY的寄存器,因为get_link_status()这个抽象接口也没法获取关于设备实例的信息。
RT-Thread下PHY设备抽象接口的改进
struct rt_phy_ops
{rt_phy_status (*init)(struct rt_phy_device *phy, void *object, rt_uint32_t phy_addr, rt_uint32_t src_clock_hz);rt_phy_status (*read)(struct rt_phy_device *phy, rt_uint32_t reg, rt_uint32_t *data);rt_phy_status (*write)(struct rt_phy_device *phy, rt_uint32_t reg, rt_uint32_t data);rt_phy_status (*loopback)(struct rt_phy_device *phy, rt_uint32_t mode, rt_uint32_t speed, rt_bool_t enable);rt_phy_status (*get_link_status)(struct rt_phy_device *phy, rt_bool_t *status);rt_phy_status (*get_link_speed_duplex)(struct rt_phy_device *phy, rt_uint32_t *speed, rt_uint32_t *duplex);
};
在RT-Thread下定义的PHY操作抽象接口中,传入struct rt_phy_device *phy这个参数,后续的驱动代码可以根据传入的参数,来进行进一步的操作,找到具体操作的请求来自于哪一个PHY设备的实例
static rt_phy_status h3_kszplib_read(struct rt_phy_device *phy,rt_uint32_t reg, rt_uint32_t *data)
{rt_mdio_t *mdio_bus = phy->bus;rt_uint32_t phy_addr = phy->addr;if (4 != mdio_bus->ops->read(mdio_bus, phy_addr, reg, (void *)data, 4)){return RT_FALSE;}return PHY_STATUS_OK;
}
static rt_phy_status h3_kszplib_linkstatus(struct rt_phy_device *phy, rt_bool_t *status)
{rt_phy_status result;rt_uint32_t data;RT_ASSERT(phy != RT_NULL);/* Read the basic status register. */result = h3_kszplib_read(phy, MII_MSR, &data);RESULT_MATCH_CHECK(result, PHY_STATUS_FAIL, outs)if (!(MII_MSR_LINKSTATUS & data)){*status = RT_FALSE; /* link down. */}else{*status = RT_TRUE; /* link up. */}outs:return result;
}
用户驱动可以通过以下方法去获取在自己驱动中定义的每个PHY设备的实例,进而获取更多驱动所需要的信息,来更好地实现PHY驱动的兼容性。
struct h3_kszplib_dev *kszplib_dev;RT_ASSERT(phy != RT_NULL);kszplib_dev = rt_container_of(phy, struct h3_kszplib_dev, rt_phydev);
关于对PHY设备抽象的改进
通过上述的修改后,可以通过BSP_USING_PHY0这样的宏定义(在Kconfig中进行定义和选择),来实现驱动中对多个PHY的驱动支持和灵活配置。
#ifdef BSP_USING_PHY0
static struct rt_phy_ops h3_ksz0plib_ops =
{.init = H3_KSZPLIB_PHY0INIT,.read = h3_kszplib_read,.write = h3_kszplib_write,.loopback = h3_kszplib_loopback,.get_link_status = h3_kszplib_linkstatus,.get_link_speed_duplex = H3_KSZPLIB_PHY0LINKS,
};static struct h3_kszplib_dev h3_kszdev0 =
{.name = PHY0_DEVICE_NAME,.phy_addr = PHY0_DEVICE_ADDRESS,.rt_phydev ={.ops = &h3_ksz0plib_ops,}
};
#endif // BSP_USING_PHY0
同样在PHY设备注册代码中,也可以采取非常灵活的方式,来实现对多个PHY设备的注册操作
int h3_kszplib_init(void)
{rt_uint32_t table_sz = sizeof(h3_kszplib_devtable)/sizeof(uint32_t);struct h3_kszplib_dev *kszplib_dev;for (uint32_t i = 1; i < table_sz; i++){kszplib_dev = h3_kszplib_devtable[i];rt_hw_phy_register(&kszplib_dev->rt_phydev, kszplib_dev->name);}return RT_EOK;
}
相关文章:

在RT-Thread下为MPU手搓以太网MAC驱动-3
文章目录 MAC驱动支持不同的PHY芯片关于对PHY设备抽象的改进RT-Thread下PHY设备抽象接口的改进关于对PHY设备抽象的改进 这是个人驱动开发过程中做的一些记录,仅代表个人意见和理解,不喜勿喷 MAC驱动需要支持不同的PHY芯片 MAC驱动支持不同的PHY芯片 关…...

Cocos Creator 2D物理引擎的使用详解
前言 Cocos Creator是一款优秀的游戏开发工具,它提供了强大的2D物理引擎,帮助开发者轻松实现游戏中的物理效果。在本文中,我们将详细介绍Cocos Creator中2D物理引擎的使用方法,并通过代码实现来演示其具体应用。 对惹࿰…...

618局外人抖音:别人挤压商家“拼价格”,它默默联合商家“抢用户”?
文|新熔财经 作者|宏一 “618”来临之际,各电商平台和短视频平台早已打响了“促销大战”。不过,今年各大平台都更积极适应新的消费形式,调整了“大促动作”。 比如淘宝、京东带头取消了沿用十年之久的预售机制&…...

【Unity AR开发插件】五、运行示例程序
专栏 本专栏将介绍如何使用这个支持热更的AR开发插件,快速地开发AR应用。 链接: Unity开发AR系列 热更数据制作:制作热更数据-AR图片识别场景 插件简介 通过热更技术实现动态地加载AR场景,简化了AR开发流程,让用户可…...

JavaScript className 类名属性操作
在JavaScript中,可以通过className属性来操作HTML元素的类名。 添加类名:可以使用element.className "className"来添加一个类名到元素中。 var element document.getElementById("myElement"); element.className " newC…...

做场外个股期权怎么询价
做场外个股期权怎么询价?没有具体的哪家做市商是询价是最低的,个人投资者需要通过机构通道方询价进行对比,各券商的报价由询价机构方提供给到投资者,可以参考不同券商的报价进行比对,再决定是否进行投资。本文来自&…...
Databend 开源周报第 146 期
Databend 是一款现代云数仓。专为弹性和高效设计,为您的大规模分析需求保驾护航。自由且开源。即刻体验云服务:https://app.databend.cn 。 Whats On In Databend 探索 Databend 本周新进展,遇到更贴近你心意的 Databend 。 支持 Expressio…...

Android12.0 SIM卡语言自适应
文章目录 需求语言设定Settings中语言切换流程检测到SIM卡,更新系统语言最终修改 需求 要求系统语言跟随SIM卡的语言变化。 语言设定 (1)系统预置语言, 即在makefile中指定的语言 (2)重启, 如果未插卡, 则系统语言为预置的语言 (3)重启插入SIM卡开机, 会自适应为…...

滴滴一季度营收同比增长14.9%至491亿元 经调整EBITA盈利9亿元
【头部财经】5月29日,滴滴在其官网发布2024年一季度业绩报告。一季度滴滴实现总收入491亿元,同比增长14.9%;经调整EBITA(非公认会计准则口径)盈利9亿元。其中,中国出行一季度实现收入445亿元,同…...
C语言 指针——指针变量的定义、初始化及解引用
目录 指针 内存如何编址? 如何对变量进行寻址? 用什么类型的变量来存放变量的地址? 如何显示变量的地址?编辑 使用未初始化的指针会怎样? NULL是什么? 如何访问指针变量指向的存储单元中的数据? 指针变量的…...

详解 Spark 的运行架构
一、核心组件 1. Driver Spark 驱动器节点,用于执行 Spark 任务中的 main 方法,负责实际代码的执行工作主要负责: 将用户程序转化为作业 (job)在 Executor 之间调度任务 (task)跟踪 Executor 的执行情况通过 UI 展示查询运行情况 2. Exec…...
盲盒小程序开发,为市场带来的新机遇
近年来,盲盒市场一直处于热门行业中,发展非常快速。在互联网的支持下,也衍生出了线上盲盒小程序,实现了线上线下双发展的态势。 盲盒小程序作为一种新的盲盒购物方式,受到了盲盒消费者的喜爱,为盲盒行业的…...

stm32学习-流水灯
接线 注意:LED灯长一点的引脚是正极。 配置GPIO 1.使用RCC开启GPIO时钟 void RCC_AHBPeriphClockCmd(uint32_t RCC_AHBPeriph, FunctionalState NewState); void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState); void RCC_APB1Perip…...
GIGE 协议摘录
系列文章目录 GIGE 学习笔记 GIGE 协议摘录 文章目录 系列文章目录引言第 1 章 设备发现1.1 链路选择1.1.1 单链路配置1.1.2 多链路配置1.1.3 链路聚合组配置 LAG 1.2 IP配置1.2.1 协议选择1.2.2 静态IP1.2.3 DHCP1.2.4 链接本地地址 LLA 1.3 设备枚举1.3.1 GVCP设备发现广播设…...
服务器的远程桌面无法连接,服务器远程桌面无法连接问题处理教程
服务器的远程桌面无法连接,服务器远程桌面无法连接问题处理教程。 一、问题概述 服务器远程桌面无法连接是日常运维中常见的问题之一。它可能由多种原因造成,如网络问题、服务器配置错误、远程桌面服务未启动等。本教程将指导您逐步排查并解决这些问题。…...
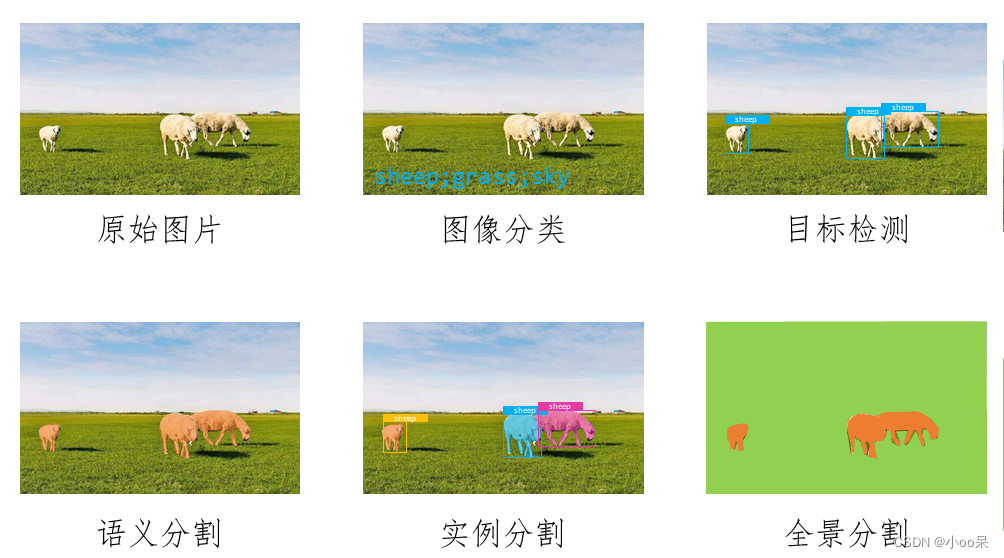
【机器学习300问】105、计算机视觉(CV)领域有哪些子任务?
计算机视觉作为人工智能的重要分支,发展至今已经在诸多领域取得显著的成果。在众多的计算机视觉任务中,图像分类、目标检测与定位、语义分割和实例分割是四个基本而关键的子任务,它们在不同的应用场景下扮演着重要角色。这四个子任务虽然各具…...
通信)
安卓手机APP开发__超宽带(UWB)通信
安卓手机APP开发__超宽带(UWB)通信 目录 概述 控制方/发起方与控制方/响应方 参数范围 后台测距 STS 配置 步骤 使用限制 代码示例 示例应用 UWB 范围 RxJava3 支持 生态系统支持 支持 UWB 的移动设备 第三方 SDK 概述 注意 :UWB 目前仅支持 Jetpac…...

儿童股骨干骨折用儿童悬吊如何进行康复
儿童股骨干骨折后的悬吊康复训练,应根据骨折的具体情况和儿童的年龄来制定个性化的康复计划。悬吊康复训练主要目的是通过减轻骨折部位的压力,促进骨折愈合,同时保持和增强儿童的肌肉力量和关节活动能力。 悬吊康复训练的方法 1.垂直悬吊皮牵…...
)
vscode plantuml插件安装使用(windows)
1、安装JDK,网址 https://www.oracle.com/java/technologies/,添加系统变量JAVA_HOME 2、安装graphviz,网址 Download | Graphviz, 并添加用户变量GRAPHVIZ_DOT 3、vscode安装插件plantuml 4、新增wsd文件,按照使用…...

Linux内核编译流程3.10
一、内核源代码编译流程 编译环境: cat /etc/redhat-release CentOS Linux release 7.4.1708 (Core) Linux内核版本: uname -r 3.10.0-693.el7.x86_64 编译内核源代码版本:linux-4.19.90-all-arch-master cp /boot/config-xxx到内核源代码目录/.configmake menuconfi…...
在OBC前级的应用)
基于Simulink的自抗扰控制(ADRC)在OBC前级的应用
手把手教你学Simulink——基于Simulink的自抗扰控制(ADRC)在OBC前级的应用 (附:OBC前级拓扑剖析+ADRC抗扰原理+TD/ESO/NLSEF算法推导+Simulink全模型搭建+动态响应/谐波抑制对比+实机部署指南) 摘要 车载充电机(OBC)前级作为交流-直流(AC-DC)整流核心,需将电网…...

Phi-4-mini-reasoning科研协作:Jupyter Notebook嵌入式推理插件
Phi-4-mini-reasoning科研协作:Jupyter Notebook嵌入式推理插件 1. 模型简介 Phi-4-mini-reasoning是一个基于合成数据构建的轻量级开源模型,专注于高质量、密集推理的数据处理能力。作为Phi-4模型家族的一员,它经过专门微调以提升数学推理…...

Video2X:用AI魔法将低分辨率视频变成4K超清大片的终极指南
Video2X:用AI魔法将低分辨率视频变成4K超清大片的终极指南 【免费下载链接】video2x A machine learning-based video super resolution and frame interpolation framework. Est. Hack the Valley II, 2018. 项目地址: https://gitcode.com/GitHub_Trending/vi/v…...

告别单调模型!FreeCAD‘逐面着色’保姆级教程:从颜色理论到3D打印预览
告别单调模型!FreeCAD‘逐面着色’保姆级教程:从颜色理论到3D打印预览 在3D设计领域,模型的美观度往往决定了第一印象。你是否遇到过这样的困境:精心建模的作品因为单调的色彩而失去表现力?FreeCAD的逐面着色功能正是打…...

Cursor Free VIP:突破AI编程助手限制的开源解决方案
Cursor Free VIP:突破AI编程助手限制的开源解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your trial…...

Vue2项目实战:集成西瓜播放器xgplayer实现企业级视频播放组件
1. 为什么选择xgplayer做企业级视频播放方案 在在线教育平台这类对视频播放要求较高的场景中,播放器的选择直接影响用户体验和开发效率。我经历过多个项目的实战验证,西瓜播放器xgplayer确实是个不错的选择。它不像某些开源播放器那样需要折腾各种兼容性…...

千问3.5-2B在VSCode中的集成应用:基于CodeX的智能编程助手搭建
千问3.5-2B在VSCode中的集成应用:基于CodeX的智能编程助手搭建 1. 引言 作为一名开发者,你是否经常在编码过程中遇到这些问题:记不清某个API的具体用法?需要快速生成重复性代码片段?遇到报错信息却找不到清晰的解释&…...

别再只会用‘Let‘s think step by step’了:DeepSeek-R1原生CoT机制详解与实战调优
解锁DeepSeek-R1推理潜能:原生思维链技术深度解析与高阶应用指南 当我们在数学考试中遇到复杂题目时,老师总会强调"把解题过程写清楚"。这种分步思考的方式,正是人类解决复杂问题的核心方法。如今,大语言模型也掌握了这…...

SM4算法在嵌入式平台的轻量化移植与优化实践
1. SM4算法与嵌入式平台适配挑战 SM4作为我国自主设计的商用分组密码标准,在物联网设备安全领域应用广泛。但直接将OpenSSL中的SM4实现移植到STM32等嵌入式平台时,开发者常会遇到三大难题: 代码体积膨胀:OpenSSL的SM4实现依赖大量…...

XHS-Downloader:解决小红书内容高效采集难题的开源解决方案
XHS-Downloader:解决小红书内容高效采集难题的开源解决方案 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、用户链接…...