Reinforcement Learning学习(三)
前言
最近在学习Mujoco环境,学习了一些官方的Tutorials以及开源的Demo,对SB3库的强化学习标准库有了一定的了解,尝试搭建了自己的环境,基于UR5E机械臂,进行了一个避障的任务,同时尝试接入了图像大模型API,做了一些有趣的应用,参考资料如下:
https://mujoco.readthedocs.io/en/stable/overview.html
https://pab47.github.io/mujocopy.html
https://github.com/ian-chuang/Manipulator-Mujoco.git
下面我打算分为原理部分,实验过程,结果展示,后续优化几个方面来展开
原理部分
首先是SB3的强化学习库,就我目前的理解来看,这个库基于gym环境以及其变体gymnasium,能够通过矢量转换方法加快训练速度,虽然比不上isaac gym,但其使用性相较更友好(个人意见),因此这里我就使用了该库进行学习
由于我的任务是机械臂的运动控制,因此我的动作空间是连续的,在这里最好还是使用PPO来作为基座模型,先把实验跑通,后续再尝试进行一些其他的优化
关于PPO的原理,其实之前有接触过了,简单理解就是分为两个策略来同时训练,一个策略和实时环境交互,过数个单位时间再把单位信息和真正的策略进行耦合,这里会用到KL散度以及一些Clip约束和优势函数来显示策略的更新速度和步长,防止策略跨度过大,再者就是一个价值损失:预测价值和真实价值之间的差距,这里我就使用了多层感知机来搭建网络
实验过程
整个实验过程分为以下几步:
- 环境的搭建,要抓取的目标,奖励的设定,障碍物&相机的配置
- 模型导入以及训练
- 重写函数,创建自由移动功能
- 接入大模型进行位置的设定
环境的一些坐标和物体参数代码如下:
# checkerboard floorself._arena = StandardArena()self._arena._mjcf_model# 定义障碍物的尺寸self.block_size = [0.3, 0.2, 0.2] # 方块的长, 宽, 高self.block1_pos = [-1, .7, 0.35]self.block2_pos = [-1, -.7, 0.35]self.block3_pos = [-1, 0, 0.35]# self.block4_pos = [.8, -.6, 1.5]# 添加方块障碍物block_body = self._arena._mjcf_model.worldbody.add("body", name=f"block1", pos=self.block1_pos)block_body.add("geom", type="box", size=self.block_size, rgba=[0, 0, 1, 1])block_body.add("freejoint") # 添加自由关节block_body = self._arena._mjcf_model.worldbody.add("body", name=f"block2", pos=self.block2_pos)block_body.add("geom", type="box", size=self.block_size, rgba=[0, 0, 0, 1])block_body.add("freejoint") # 添加自由关节block_body = self._arena._mjcf_model.worldbody.add("body", name=f"block3", pos=self.block3_pos)block_body.add("geom", type="box", size=self.block_size, rgba=[1, 1, 1, 1])block_body.add("freejoint") # 添加自由关节# 目标方块self.block_size2 = [0.1, 0.1, 0.1] # 方块的长, 宽, 高# 添加方块障碍物self.block_positions2 = [[.6, .7, 0], # 方块1[-.6,.7, 0], # 方块2[0, .7, 0]]block_body = self._arena相关文章:
)
Reinforcement Learning学习(三)
前言 最近在学习Mujoco环境,学习了一些官方的Tutorials以及开源的Demo,对SB3库的强化学习标准库有了一定的了解,尝试搭建了自己的环境,基于UR5E机械臂,进行了一个避障的任务,同时尝试接入了图像大模型API,做了一些有趣的应用,参考资料如下: https://mujoco.readthedo…...

hw meta10 adb back up DCIM
1. centos install adb 2. HW enable devlepment mode & enalbe adb debug 3. add shell root/zt/adb-sync python3 ./adb-sync --reverse /sdcard/DCIM/Camera /root/zt/meta10...

Unity2D游戏制作入门 | 12(之人物受伤和死亡的逻辑动画)
上期链接:Unity2D游戏制作入门 | 11(之人物属性及伤害计算)-CSDN博客 上期我们聊到了人物的自身属性和受伤时的计算,我们先给人物和野猪挂上属性和攻击属性的代码,然后通过触发器触发受伤的事件。物体(人物也好敌人也行ÿ…...

从河流到空气,BL340工控机助力全面环保监测网络构建
在环保监测领域,智能化、高效率的监测手段正逐步成为守护绿水青山的新常态。其中,ARMxy工业计算机BL340凭借其强大的处理能力、高度的灵活性以及广泛的兼容性,在水质监测站、空气质量检测、噪音污染监控等多个环保应用场景中脱颖而出…...
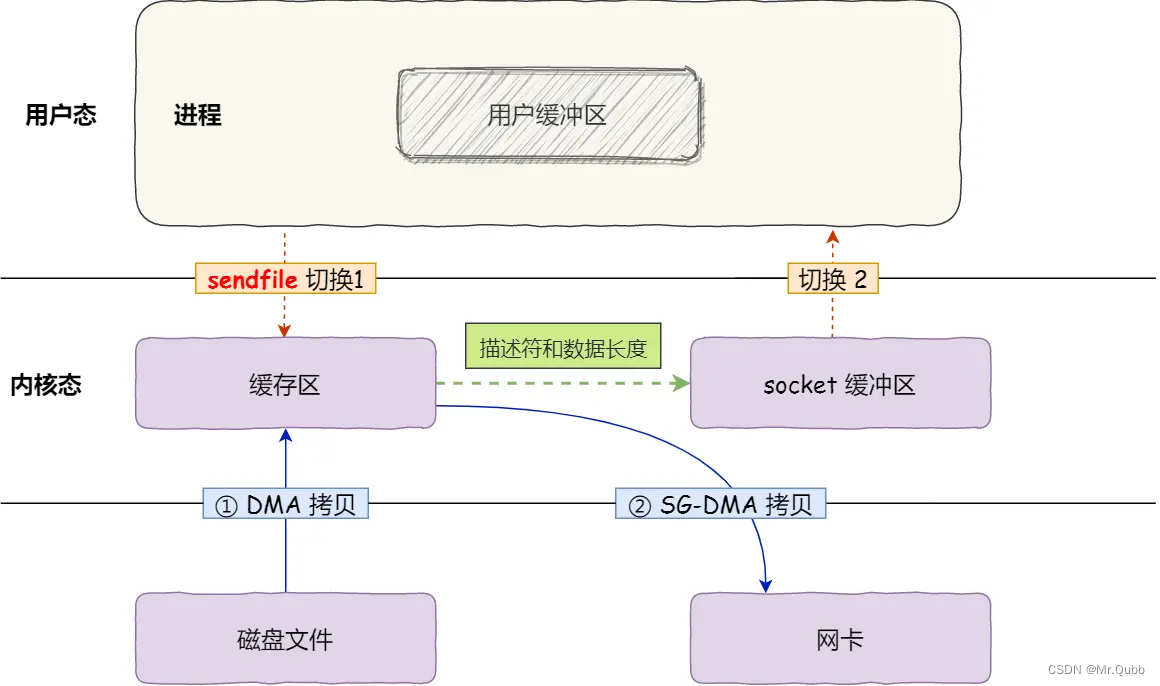
零拷贝技术
背景 磁盘可以说是计算机系统重最慢的硬件之一,读写速度相对内存10以上,所以针对优化磁盘的技术非常的多,比如:零拷贝、直接I/O、异步I/O等等,这些优化的目的就是为了提高系统的吞吐量,另外操作系统内核中的…...

Flutter_Android上架GooglePlay_问题
上架GooglePlay权限问题 问题描述 REQUEST_INSTALL_PACKAGES 权限问题解决方式 方式1 找到所有使用该权限的库修改删除该权限引用 方式2 打开项目 ~/andoird/app/src/main/AndroidMainfest.xml 添加文本<uses-permission android:name"android.permission.REQUES…...

【Java】解决Java报错:NumberFormatException
文章目录 引言1. 错误详解2. 常见的出错场景2.1 字符串包含非数字字符2.2 空字符串或 null 字符串2.3 数值超出范围 3. 解决方案3.1 验证字符串格式3.2 使用异常处理3.3 处理空字符串和 null 4. 预防措施4.1 数据验证4.2 编写防御性代码4.3 单元测试 结语 引言 在Java编程中&a…...
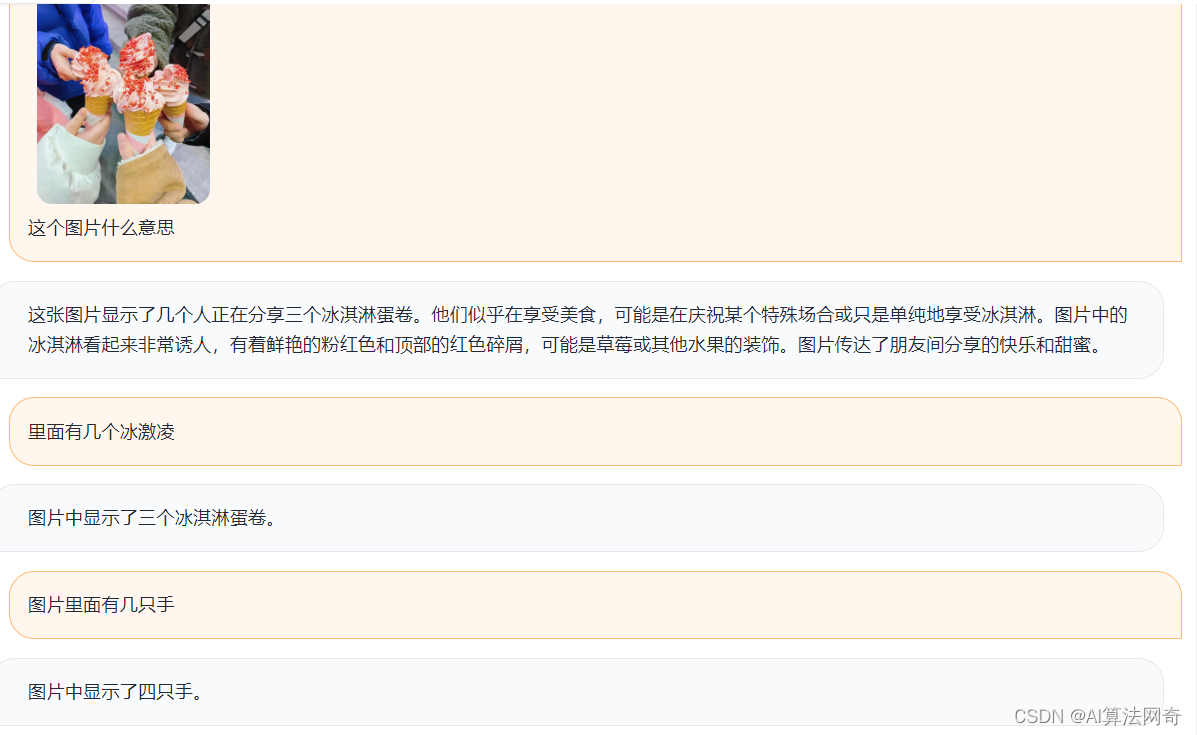
视觉大模型(VLLM)学习笔记
视觉多模态大模型(VLLM) InternVL 1.5 近日,上海人工智能实验室 OpenGVLab 团队、清华大学、商汤科技合作推出了开源多模态大语言模型项目InternVL 1.5,它不仅挑战了商业模型巨头例如 GPT-4V 的霸主地位,还让我们不禁…...

【软考的系统分析师的考题考点解析2025】
2024-2025系统分析师考试(简称软考)是计算机技术与软件专业技术资格(水平)考试中的高级资格考试,主要考察考生在系统分析、系统设计、项目管理等方面的知识和技能。以下是软考系统分析师的常见考点、考题和重点&#x…...

JavaScript前端技术入门教程
引言 在前端开发的广阔天地中,JavaScript无疑是最耀眼的一颗明星。它赋予了网页动态交互的能力,让网页从静态的文本和图片展示,进化为可以与用户进行实时交互的丰富应用。本文将带您走进JavaScript的世界,为您提供一个入门级的教…...
类和对象(上续)
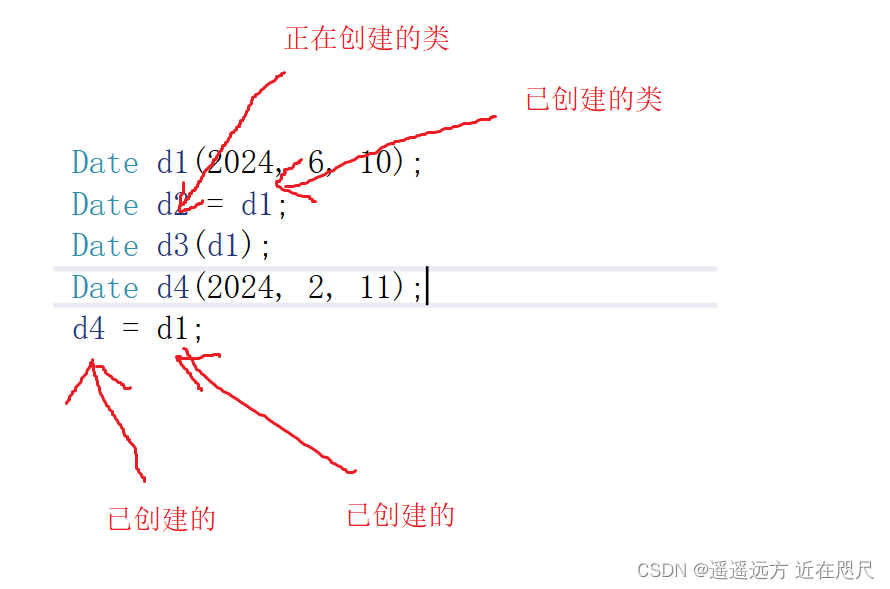
前言:本文介绍类和对象中的一些比较重要的知识点,为以后的继续学习打好基础。 目录 拷贝构造 拷贝构造的特征: 自定义类型的传值传参 自定义类型在函数中的传值返回 如果返回值时自定义的引用呢? 在什么情况下使用呢&#…...
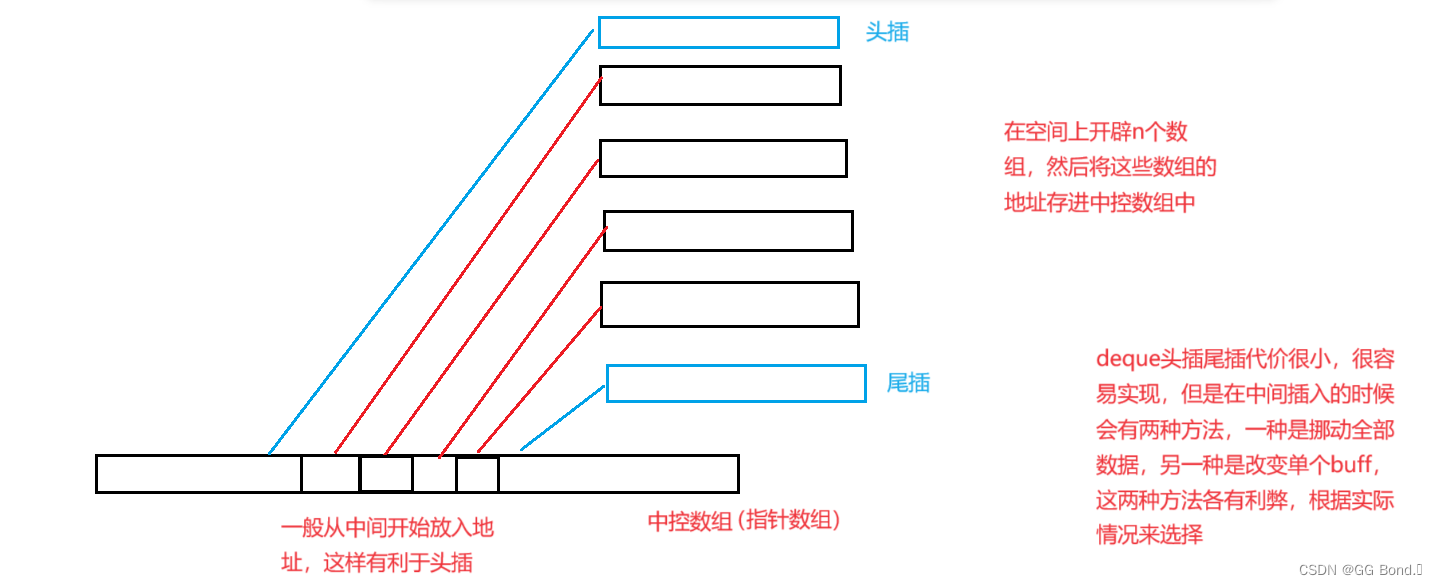
【C++初阶学习】第十三弹——优先级队列及容器适配器
C语言栈:数据结构——栈(C语言版)-CSDN博客 C语言队列:数据结构——队列(C语言版)-CSDN博客 C栈与队列:【C初阶学习】第十二弹——stack和queue的介绍和使用-CSDN博客 前言: 在前面,我们已经…...
Java(十七)---ArrayList的使用
文章目录 前言1.ArrayList的简介2. ArrayList使用2.1.ArrayList的构造2.2.ArrayList的扩容机制(JDK17) 3.ArrayList的常见操作4. ArrayList的具体使用4.1.[杨辉三角](https://leetcode.cn/problems/pascals-triangle/description/)4.2.简单的洗牌游戏 5.ArrayList的问题及思考 …...
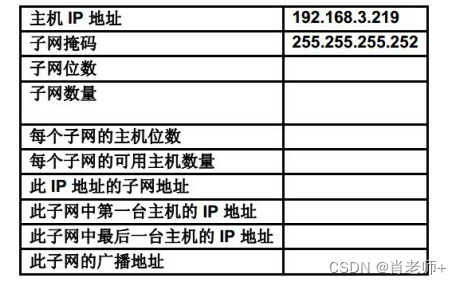
实验六、IPv4 地址的子网划分,第 2 部分《计算机网络》
你有没有发现,困的时候真的清醒不了。 目录 一、实验目的 二、实验内容 三、实验小结 一、实验目的 完成本练习之后,您应该能够确定给定 IP 地址和子网掩码的子网信息。 知道 IP 地址、网络掩码和子网掩码后,您应该能够确定有关该 IP 地…...
定个小目标之刷LeetCode热题(12)
这是一道简单题,使用位运算中的异或运算即可,异或运算有以下性质: 1、任何数异或 0 结果仍然是原来的数,即 a⊕0a 2、任何数和其自身做异或运算,结果是 0 所以我们只需要让数组里的所有元素进行异或运算得到的结果就…...

MYSQL内存占用查询语句
可以通过以下 SQL 语句查询相关配置参数的当前值: InnoDB 缓冲池大小 (innodb_buffer_pool_size): SHOW VARIABLES LIKE innodb_buffer_pool_size;最大连接数 (max_connections): SHOW VARIABLES LIKE max_connections;临时表大小 (tmp_table…...
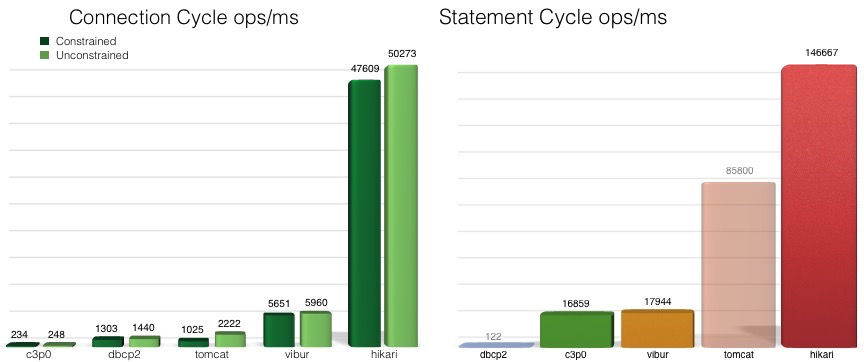
HikariCP连接池初识
HikariCP的简单介绍 hikari-光,hikariCP取义:像光一样轻和快的Connetion Pool。这个几乎只用java写的中间件连接池,极其轻量并注重性能,HikariCP目前已是SpringBoot默认的连接池,伴随着SpringBoot和微服务的普及&…...

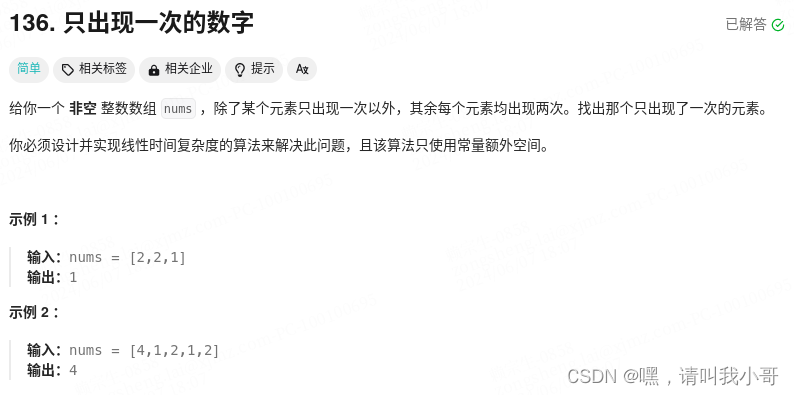
LeetCode136只出现一次的数字
题目描述 给你一个 非空 整数数组 nums ,除了某个元素只出现一次以外,其余每个元素均出现两次。找出那个只出现了一次的元素。你必须设计并实现线性时间复杂度的算法来解决此问题,且该算法只使用常量额外空间。 解析 需要想到异或运算&#…...

html5实现端午节网站源码
文章目录 1.设计来源1.1 端午首页页面1.2 端午由来页面1.3 端午图集页面1.4 端午活动页面1.5 给我留言页面 2.效果和源码2.1 动态效果2.2 目录结构 源码下载 作者:xcLeigh 文章地址:https://blog.csdn.net/weixin_43151418/article/details/139524377 ht…...
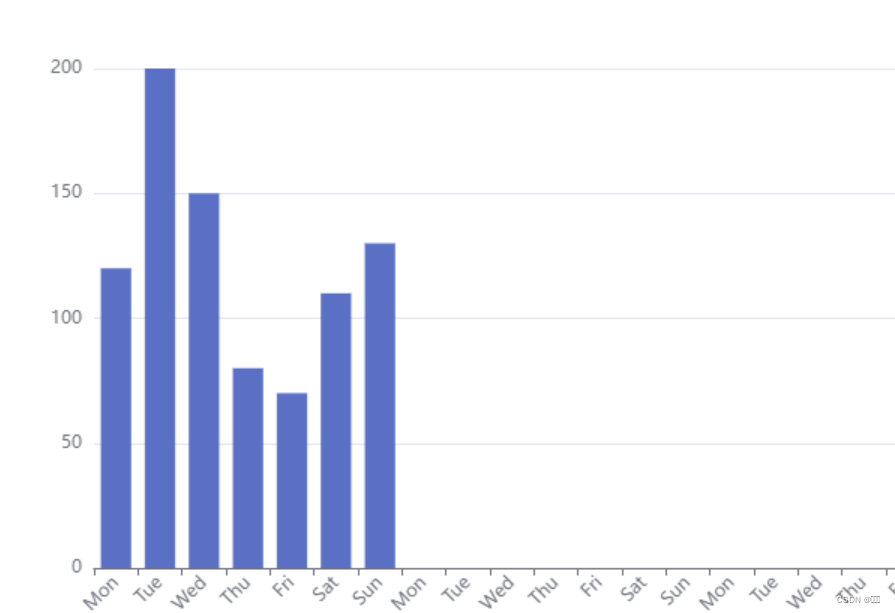
echarts组件x轴坐标显示不全解决方法
1.旋转: 修改前: option {xAxis: {type: category,data: [Mon, Tue, Wed, Thu, Fri, Sat, Sun,Mon, Tue, Wed, Thu, Fri, Sat, Sun,Mon, Tue, Wed, Thu, Fri, Sat, Sun]},yAxis: {type: value},series: [{data: [120, 200, 150, 80, 70, 110, 130,120, 200, 150, 80, 70, 1…...
 编码溢出到 ReadLine() 缓冲区残留)
输入流避坑全指南:从 Read() 编码溢出到 ReadLine() 缓冲区残留
1. 灵异事件:为什么我的循环跑了 52 次? 在编写基础逻辑题时,我曾遇到一个极其诡异的Bug:要求用户输入边长nnn打印正方形,我输入4,结果程序打印了 52行符号。 问题代码: int n Console.Read();…...

从零部署私有AI助手:igogpt项目实战与优化指南
1. 项目概述与核心价值最近在折腾AI应用部署的时候,发现了一个挺有意思的项目,叫igolaizola/igogpt。乍一看这个名字,可能会有点摸不着头脑,但如果你对开源AI模型部署和WebUI界面搭建感兴趣,那这个项目绝对值得你花时间…...

Memorix分布式内存缓存系统:架构解析与部署实践
1. 项目概述:Memorix,一个为现代应用设计的分布式内存缓存系统如果你正在构建一个需要处理高并发请求、对响应延迟有苛刻要求的应用,比如一个实时排行榜、一个秒杀系统,或者一个需要频繁读取用户会话的社交平台,那么你…...

ARM GICv3中断控制器与ICC_BPR1寄存器详解
1. ARM GICv3中断控制器架构概述在ARM架构的现代处理器中,通用中断控制器(GIC)是管理硬件中断的核心组件。GICv3作为当前主流的版本,相比前代架构进行了多项重要改进:支持更多处理器核心(理论上可达128个PE)改进的中断…...

远程临场机器人:从微控制器到系统集成的工程实践
1. 项目概述:从科幻到现实的远程临场机器人几年前,当我第一次在行业展会上看到一个四英尺高、顶着平板电脑、在人群中自如穿梭的机器人时,我的第一反应和很多人一样:这玩意儿不就是个带轮子的视频电话吗?能有多大用处&…...

GaN功率器件表征实战:从SOA曲线到动态测试与可靠性评估
1. 项目概述:为什么我们需要重新审视GaN功率器件的表征?如果你最近在设计开关电源、电机驱动或者任何需要高效能量转换的电路,大概率已经听过氮化镓(GaN)这个名字。它不再只是实验室里的未来科技,而是实实在…...

Dify工作流设计实战:从模式解析到生产部署的Awesome资源指南
1. 项目概述:一个为Dify工作流而生的“Awesome”资源集合如果你正在使用Dify.AI来构建你的AI应用,并且已经深入到工作流这个强大但略显复杂的模块,那么你很可能和我一样,经历过一段“摸着石头过河”的时期。Dify的官方文档固然详尽…...

2025最权威的五大降AI率方案推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 在当今这个人工智能生成内容被广泛运用的时代,“降AI”已经成为内容创作者以及运…...
)
企业微信打卡数据拉取实战:Spring Boot + FastJSON 完整配置流程(含AccessToken获取避坑指南)
企业微信打卡数据集成实战:Spring Boot工程化解决方案 最近两年,越来越多的企业开始将考勤管理从传统硬件设备迁移到企业微信这样的数字化平台。但真正把打卡数据用起来,往往需要与企业内部系统深度集成。上周刚帮一家零售企业解决了这个问题…...

程序员转大模型,这8个必备框架,新手也能快速落地项目
文章目录前言1. LangChain 2026:AI应用开发的"事实标准",新手入门绕不开1.1 大白话理解LangChain1.2 2026年核心更新亮点1.3 新手快速上手代码示例1.4 避坑指南2. LlamaIndex:RAG专属神器,知识库搭建就靠它2.1 大白话理…...