线性代数|机器学习-P10最小二乘法的四种方案
文章目录
- 1. 概述
- 2. SVD奇异值分解
- 3. 最小二乘法方程解
- 4. 最小二乘法图像解释
- 5. Gram-Schmidt
1. 概述
当我们需要根据一堆数据点去拟合出一条近似的直线的时候,就会用到 最小二乘法 .根据矩阵A的情况,有如下四种方法
- 在r = n = m 时,SVD奇异值分解, A = U Σ V T A=U\Sigma V^T A=UΣVT,伪逆矩阵 A + = V Σ − 1 U T A^{+}=V\Sigma^{-1}U^T A+=VΣ−1UT
- 在矩阵A列满秩的情况下(r=n),直接用方程 A T A x ^ = A T b → x ^ = ( A T A ) − 1 A T b A^TA\hat{x}=A^Tb\rightarrow \hat{x}=(A^TA)^{-1}A^Tb ATAx^=ATb→x^=(ATA)−1ATb
- 在条件数 σ 1 σ r \frac{\sigma_1}{\sigma_r} σrσ1太大时,通过
Gram-Schmidt生成一个正交列向量, A = Q R → x ^ = R − 1 Q T b A=QR\rightarrow \hat{x}=R^{-1}Q^Tb A=QR→x^=R−1QTb,通过消除后得到可以求逆的 R − 1 R^{-1} R−1 - 加惩罚项, ( A T A + δ 2 I ) x ^ = A T b → x ^ = ( A T A + δ 2 I ) − 1 A T b (A^TA+\delta ^2 I)\hat{x}=A^Tb\rightarrow \hat{x}=(A^TA+\delta ^2 I)^{-1}A^Tb (ATA+δ2I)x^=ATb→x^=(ATA+δ2I)−1ATb,通过在对角线上加一个趋近于0的 δ 2 \delta ^2 δ2保证矩阵 ( A T A + δ 2 I ) (A^TA+\delta ^2 I) (ATA+δ2I)可逆,这样通过方程就可以得到想要的 x ^ \hat{x} x^
2. SVD奇异值分解
假设我们矩阵A可逆,那么我们就可以直接得到矩阵A的逆,那么此时的矩阵A的伪逆就等于矩阵A的逆
当矩阵 A 可逆 → A + = A − 1 \begin{equation} 当矩阵A可逆\rightarrow A^{+}=A^{-1} \end{equation} 当矩阵A可逆→A+=A−1
将矩阵A通过奇异值SVD分解可得如下:
A = U Σ V T , A T = V Σ T U T \begin{equation} A=U\Sigma V^T,A^T=V\Sigma^TU^T \end{equation} A=UΣVT,AT=VΣTUT
- 得到 A A T , A T A AA^T,A^TA AAT,ATA
A A T = U Σ Σ T U T , A T A = V Σ T Σ V T \begin{equation} AA^T=U\Sigma\Sigma^T U^T,A^TA=V\Sigma^T\Sigma V^T \end{equation} AAT=UΣΣTUT,ATA=VΣTΣVT - A A T AA^T AAT可以看出矩阵A右乘以 A T A^T AT,所以得到结果为列空间向量,所以U为列空间基;同理 A T A A^TA ATA可以看出矩阵A左乘以 A T A^T AT,所以结果为行空间向量,所以V为行空间基。那么我们可以通过 A v i = σ i u i Av_i=\sigma_i u_i Avi=σiui来对看作是行空间基 v i v_i vi 通过 A v i Av_i Avi变换后直接得到列空间基 σ i u i \sigma_i u_i σiui,同理可得, A T u i = σ i v i A^Tu_i=\sigma_i v_i ATui=σivi可以看作是列空间基 u i u_i ui,通过 A T u i A^Tu_i ATui变换后直接得到行空间基 σ i v i \sigma_i v_i σivi,那么对于行空间(r个基向量)和列空间(r个基向量)之间可以通过 A , A T A,A^T A,AT进行转换
A v i = σ i u i , A T u i = σ i v i → A + = A T \begin{equation} Av_i=\sigma_iu_i,A^Tu_i=\sigma_iv_i\rightarrow A^{+}=A^T \end{equation} Avi=σiui,ATui=σivi→A+=AT

- 通过奇异值分解可得:
A = U Σ V T = [ u 1 u 2 ⋯ u m ] [ σ 1 σ 2 ⋱ σ r 0 ] [ v 1 T v 2 T ⋮ v n T ] \begin{equation} A=U\Sigma V^T=\begin{bmatrix}u_1&u_2&\cdots &u_m\end{bmatrix}\begin{bmatrix}\sigma_1\\\\&\sigma_2\\\\&&\ddots\\\\&&&\sigma_r\\\\&&&&0\end{bmatrix}\begin{bmatrix}v_1^T\\\\v_2^T\\\\\vdots \\\\v_n^T\end{bmatrix} \end{equation} A=UΣVT=[u1u2⋯um] σ1σ2⋱σr0 v1Tv2T⋮vnT - 将矩阵A求逆可得:
A − 1 = V Σ − 1 U T = V [ σ 1 − 1 σ 2 − 1 ⋱ σ r − 1 0 − 1 ] U T \begin{equation} A^{-1}=V\Sigma^{-1} U^T=V\begin{bmatrix}\sigma_1^{-1}\\\\&\sigma_2^{-1}\\\\&&\ddots\\\\&&&\sigma_r^{-1}\\\\&&&&0^{-1}\end{bmatrix}U^T \end{equation} A−1=VΣ−1UT=V σ1−1σ2−1⋱σr−10−1 UT
Σ Σ − 1 = [ 1 1 ⋱ 1 0 ⋱ 0 ] \begin{equation} \Sigma\Sigma^{-1}=\begin{bmatrix}1\\\\&1\\\\&&\ddots\\\\&&&1\\\\&&&&0\\\\&&&&&\ddots\\\\&&&&&&0\end{bmatrix} \end{equation} ΣΣ−1= 11⋱10⋱0 - 我们发现 0 − 1 0^{-1} 0−1根本不存在,所以奇异值分解直接求伪逆 A − 1 A^{-1} A−1也出问题了。出问题的点在于对于特征值为0时候,无法求0的倒数,那就是所如果我们不用零空间的向量和其0特征值,只有行和列空间里面的向量,那么就没这个问题了,这就是
Gram-Schmidt的思路,从矩阵A的列空间中挑选向量u_1,其他向量 m 1 m_1 m1 不是列空间的,那就通过正交化Gram-Schmidt将其变换为 m 1 → u 2 m_1\rightarrow u_2 m1→u2,这样我们就能得到一个可逆矩阵M,这样我们就能通过公式 M − 1 M^{-1} M−1直接计算所需要的 x ^ \hat{x} x^
3. 最小二乘法方程解
我们知道,当我们有一个方程 A x = b Ax=b Ax=b时,我们得到的是一堆数据点,我们需要拟合一个直线,使得 ∣ ∣ A x ^ − b ∣ ∣ 2 2 = ( A x ^ − b ) 2 ||A\hat{x}-b||_2^2=(A\hat{x}-b)^2 ∣∣Ax^−b∣∣22=(Ax^−b)2 值最小,所以我们得到如下方程:
y = ( A x − b ) 2 = ( A x − b ) T ( A x − b ) = ( x T A T − b T ) ( A x − b ) \begin{equation} y=(Ax-b)^2=(Ax-b)^T(Ax-b)=(x^TA^T-b^T)(Ax-b) \end{equation} y=(Ax−b)2=(Ax−b)T(Ax−b)=(xTAT−bT)(Ax−b)
- 整理可得:
y = x T A T A x − x T A T b − b T A x + b T b \begin{equation} y=x^TA^TAx-x^TA^Tb-b^TAx+b^Tb \end{equation} y=xTATAx−xTATb−bTAx+bTb - 因为 b T A x b^TAx bTAx为常数,所以得到 x T A T b = b T A x x^TA^Tb=b^TAx xTATb=bTAx
y = x T A T A x − 2 b T A x + b T b → ∂ y ∂ x = ∂ x T A T A x ∂ x − 2 ∂ b T A x ∂ x \begin{equation} y=x^TA^TAx-2b^TAx+b^Tb\rightarrow \frac{\partial y}{\partial x}= \frac{\partial x^TA^TAx}{\partial x}-2 \frac{\partial b^TAx}{\partial x} \end{equation} y=xTATAx−2bTAx+bTb→∂x∂y=∂x∂xTATAx−2∂x∂bTAx - 根据矩阵求导可得,
注意转置符号,别漏了:
∂ x T A T A x ∂ x = 2 A T A x ; − 2 ∂ b T A x ∂ x = A T b \begin{equation} \frac{\partial x^TA^TAx}{\partial x}=2A^TAx;-2 \frac{\partial b^TAx}{\partial x}=A^Tb \end{equation} ∂x∂xTATAx=2ATAx;−2∂x∂bTAx=ATb - 所以求导公式可以整理得到:
∂ y ∂ x = 2 A T A x − 2 A T b = 0 → A T A x ^ = A T b \begin{equation} \frac{\partial y}{\partial x}=2A^TAx-2A^Tb=0\rightarrow A^TA\hat{x}=A^Tb \end{equation} ∂x∂y=2ATAx−2ATb=0→ATAx^=ATb - 是不是很神奇,用矩阵求导得到的结果,居然是跟我们用投影法一样的,如果要满足求出上述的 x ^ \hat{x} x^,也就需要 A T A A^TA ATA 可逆,也就是需要矩阵A满秩,所以跟以前对上来了。
- 当矩阵A列满秩,所以 A T A A^TA ATA 可逆,方程有解如下:
x ^ = ( A T A ) − 1 A T b \begin{equation} \hat{x}=(A^TA)^{-1}A^Tb \end{equation} x^=(ATA)−1ATb
4. 最小二乘法图像解释
假设我们有一个矩阵A和方程 A x = b Ax=b Ax=b,求解最优 b ^ \hat{b} b^?
- 从四个子空间可以看出,我们画出任意向量b,如下图所示:
当我们要求的向量b不在由矩阵A的列向量组成的空间时候,我们其实无法得到正确的解,那么怎么办呢?如果我们将向量b分解,一部分通过投影可得向量 p = A x ^ p=A\hat{x} p=Ax^,其在矩阵A的列空间中,另外一部分就是e= A x − b Ax-b Ax−b,只有投影上去了,我们才能够根据向量p来求得近似的解 x ^ \hat{x} x^

5. Gram-Schmidt
Gram-Schmidt 的作用是将矩阵A进行正交分解为 A = Q R A=QR A=QR,本身也是通过投影后相减得到垂直向量,这样通过Gram-Schmidt 变换后的矩阵都正交,得到一个可逆矩阵Q和R
A = Q R , A T = R T Q T , A T A x ^ = A T b → R T Q T Q R x ^ = R T Q T b → R x ^ = Q T b \begin{equation} A=QR,A^T=R^TQ^T,A^TA\hat{x}=A^Tb\rightarrow R^TQ^TQR\hat{x}=R^TQ^Tb\rightarrow R\hat{x}=Q^Tb \end{equation} A=QR,AT=RTQT,ATAx^=ATb→RTQTQRx^=RTQTb→Rx^=QTb
- 整理可得:
x ^ = R − 1 Q T b \begin{equation} \hat{x}=R^{-1}Q^Tb \end{equation} x^=R−1QTb
相关文章:
线性代数|机器学习-P10最小二乘法的四种方案
文章目录 1. 概述2. SVD奇异值分解3. 最小二乘法方程解4. 最小二乘法图像解释5. Gram-Schmidt 1. 概述 当我们需要根据一堆数据点去拟合出一条近似的直线的时候,就会用到 最小二乘法 .根据矩阵A的情况,有如下四种方法 在r n m 时,SVD奇异…...
【Android面试八股文】你能描述一下JVM中的类加载过程吗?
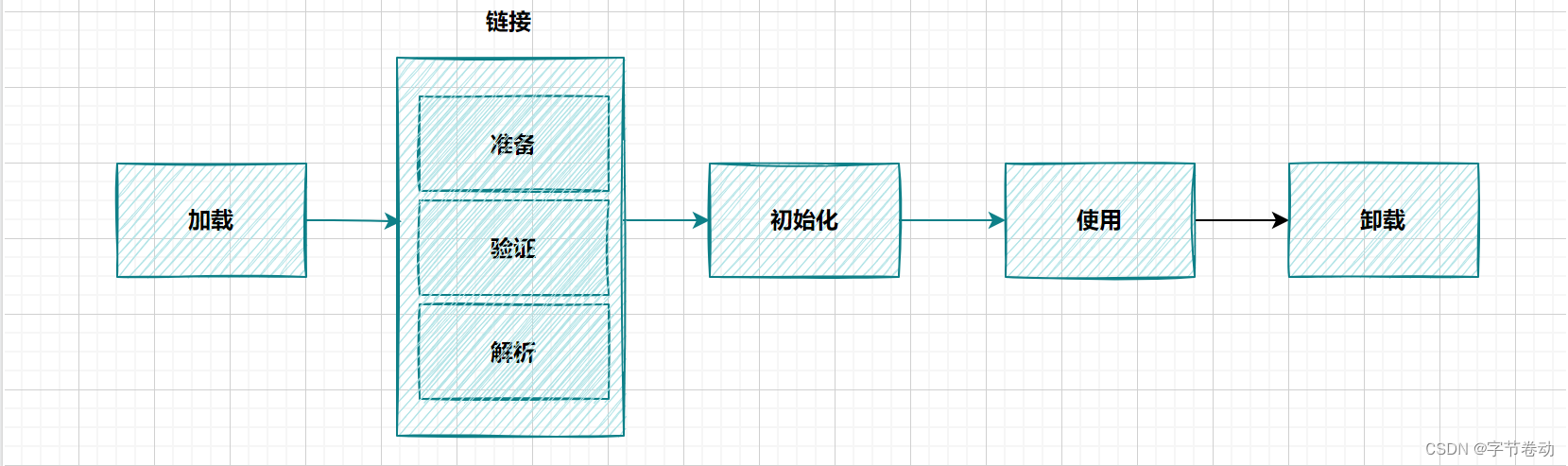
文章目录 一、Java类的生命周期二、JVM类加载过程1. 加载(Loading)2. 链接(Linking)a. 验证(Verification)b. 准备(Preparation)b.1 准备阶段的初始值b.2 用户定义的初值b.3 常量的初始化c. 解析(Resolution)3. 初始化(Initialization)3.1 什么是 `<clinit>`…...
MYSQL八、MYSQL的SQL优化
一、SQL优化 sql优化是指:通过对sql语句和数据库结构的调整,来提高数据库查询、插入、更新和删除等操作的性能和效率。 1、插入数据优化 要一次性往数据库表中插入多条记录: insert into tb_test values(1,tom); insert into tb_tes…...

鸿蒙轻内核M核源码分析系列二一 02 文件系统LittleFS
1、LFS文件系统结构体介绍 会分2部分来介绍结构体部分,先介绍LittleFS文件系统的结构体,然后介绍LiteOS-M内核中提供的和LittleFS相关的一些结构体。 1.1 LittleFS的枚举结构体 在openharmony/third_party/littlefs/lfs.h头文件中定义LittleFS的枚举、…...

【ARMv8/ARMv9 硬件加速系列 3 -- SVE 指令语法及编译参数详细介绍】
文章目录 SVE 汇编语法SVE 单通道谓词SVE 测试代码 SVE 软件和库支持SVE 编译参数配置-marcharmv8-alseprofilememtagsve2-aessve2-bitpermcryptosve2sve2-sha3sve2-sm4 SVE 汇编语法 在介绍 SVE 汇编指令语法之前,先介绍下如何判断自己所使用的芯片是否实现了SVE功…...

Java版+ SaaS应用+接口技术RESTful API 技术开发的智慧医院HIS系统源码 专注医院管理系统研发 支持二开
Java版 SaaS应用接口技术RESTful API WebSocket WebService技术开发的智慧医院HIS系统源码 专注医院管理系统研发 支持二开 医院住院管理系统(Hospital Information System简称HIS)是一门医学、信息、管理、计算机等多种学科为一体的边缘科学ÿ…...

工业机器人远程运维,增强智慧工厂运营管理
1、需求背景 随着工业自动化技术的普及和工业机器人应用的增加,制造业对于生产线稳定性和效率的要求不断提高。然而,传统的现场监控方式存在着地理位置限制、实时监控难度大以及诊断能力有限等问题,迫切需要一种更具灵活性和效率的监控方式。…...

理解Python的元类
1.type()函数 type 函数是一个内置函数,用来获取一个对象的类型。它可以接受一个参数,返回这个参数的数据类型。type也可以用来创建类,type就是元类 x333 list["ab"] tuple (1, "a", True, 3.14) dict {name: Alice,…...

web前端黑马下载:探索学习资源的海洋
web前端黑马下载:探索学习资源的海洋 在数字化时代,Web前端技术日益成为互联网行业的核心驱动力。为了跟上这一趋势,众多学习者纷纷投身于Web前端的学习之中。而在这个过程中,“黑马”作为一个备受瞩目的品牌,其Web前…...

最新版jd-gui下载
对于java开发的工程师来说,jd-gui应该是经常会用到的工具了 官网的jd-gui目前只支持到JAVA13,更新版本JAVA编译出来的JAR包就反编译不出来了 此版本支持到了JAVA23 如果需要win以外的其他版本,可以查看我的其他上传 如果不想花积分&#…...
FPGA时钟--->(001)时钟介绍)
(051)FPGA时钟--->(001)时钟介绍
(001)时钟介绍 1 目录 (a)FPGA简介 (b)Verilog简介 (c)时钟简介 (d)时钟介绍 (e)结束 1 FPGA简介 (a)FPGA(Field Programmable Gate Array)是在PAL (可编程阵列逻辑)、GAL(通用阵列逻辑)等可编程器件的基础上进一步发展的产物。它是作为专用集成电…...

Java程序员英语单词通关:
Java程序员英语单词通关: abstract - 抽象的 boolean - 布尔值 break - 打断 byte - 字节 case - 情况,实例 catch - 捕获 char - 字符 class - 类 continue - 继续 default - 默认,通常 do - 做,运行 double - 双精度…...

数据库开发-Mysql03
目录 1. 多表查询 1.1 概述 1.1.1 数据准备 1.1.2 介绍 1.1.3 分类 1.2 内连接 1.3 外连接 1.4 子查询 1.4.1 介绍 1.4.2 标量子查询 1.4.3 列子查询 1.4.4 行子查询 1.4.5 表子查询 1.5 案例 2. 事务 2.1 介绍 2.2 操作 2.3 四大特性 3. 索引 3.1 介绍 3…...
)
0-1 背包问题(动态规划 查询背包元素)
描述 给定n种物品和一个背包,物品i的重量是Wi,其价值为Vi,问如何选择装入背包的物品,使得装入背包的物品的总价值最大? 在选择装入背包的物品时,对每种物品i只能有两种选择,装入或者不装入…...

elasticsearch快照生成与恢复
Elasticsearch快照生成与恢复的场景主要涉及到数据的备份与恢复需求。当需要对Elasticsearch集群中的数据进行备份,或者在数据丢失、损坏等情况下需要恢复数据时,就可以使用快照功能。 快照生成的方法通常包括以下步骤: 1、创建一个快照仓库…...
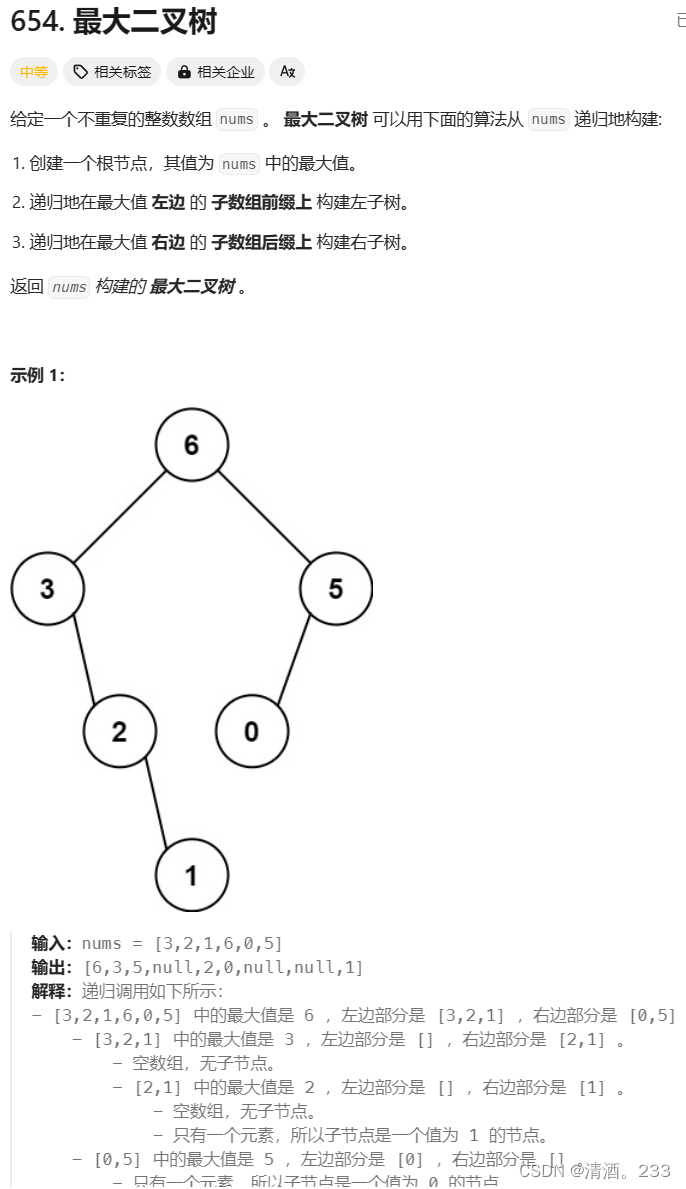
178.二叉树:最大二叉树(力扣)
代码解决 /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(nullptr), right(nullptr) {}* TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}* Tre…...

跨境电商中的IP隔离是什么?怎么做?
一、IP地址隔离的概念和原理 当我们谈论 IP 地址隔离时,我们实际上是在讨论一种网络安全策略,旨在通过技术手段将网络划分为不同的区域或子网,每个区域或子网都有自己独特的 IP 地址范围。这种划分使网络管理员可以更精细地控制哪些设备或用…...
【C++】stack、queue和deque的使用
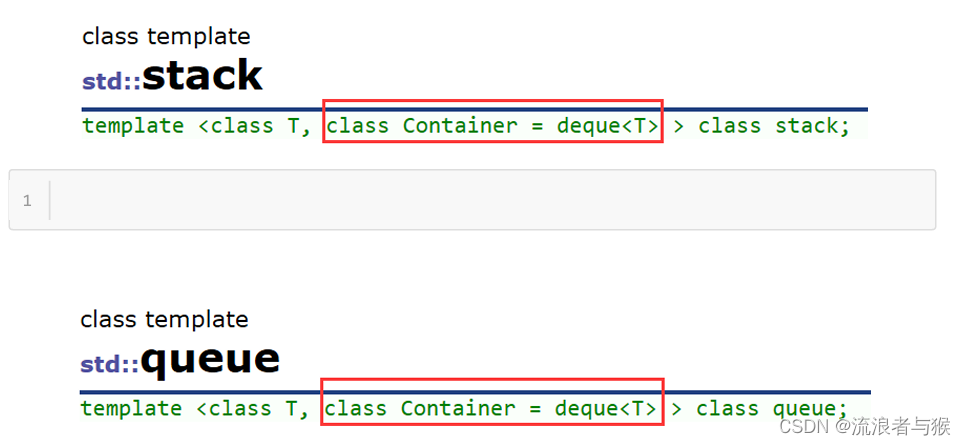
💗个人主页💗 ⭐个人专栏——C学习⭐ 💫点击关注🤩一起学习C语言💯💫 目录 导读 一、stack 1. stack介绍 2. stack使用 二、queue 1. queue介绍 2. queue使用 三、deque 1. deque介绍 2. deque的…...

通过SSH远程登录华为设备
01 进入系统编辑视图 system-view Enter system view, return user view with return command. 02 创建本地RSA密钥对 [HUAWEI]rsa local-key-pair creat The key name will be:HUAWEI_Host The range of public key size is (2048 ~ 2048). NOTE: Key pair generation will ta…...
算法day27
第一题 515. 在每个树行中找最大值 首先是遍历每层的节点,将每一层最大值的节点的值保留下来,最后将所有层的最大值的表返回;具体的遍历每层节点的过程如上一篇故事; 综上所述,代码如下: /*** Definition …...

docker启动线程创建异常 pthread_create EPERM | RuntimeError: can‘t start new thread
直接说答案,着急就复制过去使用 docker配置 增加对应权限配置参数即可 --privileged 如果上述不行,docker配置 使用组合方式 --privileged \ --ulimit nproc65535:65535 \ --ulimit nofile65535:65535 \详细解释 下面逐项解释这些 Docker 参数的作用、…...

【源码篇】地牢里的钟摆,解析引擎与运算核心的 C++ 映射
概要:光有律令是不够的,我们需要看到法则在地牢里真正流动的样子。响应大家的呼声,本篇将正式公开我为这台 4-bit 处理器设计的运算核心(ALU)与指令解析引擎(Decoder)的部分源码。看 C11 如何精…...
)
你还在手动查证引文和逻辑漏洞?Perplexity书评辅助的实时溯源与反事实验证机制(仅限Pro+插件开放)
更多请点击: https://codechina.net 第一章:你还在手动查证引文和逻辑漏洞?Perplexity书评辅助的实时溯源与反事实验证机制(仅限Pro插件开放) Perplexity Pro 插件引入的实时溯源与反事实验证机制,彻底重构…...

Layerdivider深度解析:5步实现智能图像分层,生成专业级PSD文件
Layerdivider深度解析:5步实现智能图像分层,生成专业级PSD文件 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider Layerdivider是一款…...

ARM+FPGA异构计算在能源电力领域的核心优势与应用实践
1. 项目概述:为什么是ARMFPGA?最近几年,在能源电力这个对可靠性和实时性要求极高的领域,我观察到一股明显的技术趋势:越来越多的项目开始采用“国产ARM处理器 FPGA”的异构计算架构。这不再是实验室里的概念验证&…...

从Dubbo超时到内存锯齿:高并发服务JVM调优与大对象排查实战
1. 项目背景与问题初现做后端服务开发,尤其是高并发场景下的核心服务,最怕的就是线上服务“抽风”——平时跑得好好的,一到业务高峰期就出现各种超时、失败。最近我就遇到了一个典型的案例,我们团队负责的一个音乐核心服务&#x…...

Python开发者三步完成Taotoken接入并调用多模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者三步完成Taotoken接入并调用多模型 对于希望便捷使用多种大语言模型的Python开发者而言,通过一个统一的AP…...

i.MX6ULL电容触摸驱动开发:从硬件原理到Linux输入子系统实战
1. 项目概述:从零到一,搞定i.MX6ULL电容触摸最近在搞一个基于i.MX6ULL的工控HMI项目,客户要求界面操作必须流畅跟手,这就对触摸屏的响应速度和精度提出了硬性要求。市面上很多现成的模块要么驱动兼容性差,要么调试信息…...

RGB无人机图像实现野火温度预测与分割技术解析
1. 项目概述:RGB无人机图像实现野火温度预测与分割 在野火监测领域,无人机搭载热成像传感器已成为主流方案,但高昂的硬件成本和有限的续航能力始终是规模化部署的瓶颈。我们团队开发的SAM-TIFF框架突破性地实现了仅用普通RGB摄像头就能完成两…...

Visual C++ 运行库一体化解决方案:跨版本兼容性管理实践
Visual C 运行库一体化解决方案:跨版本兼容性管理实践 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist Windows 应用程序依赖的 Visual C 运行库版本碎…...