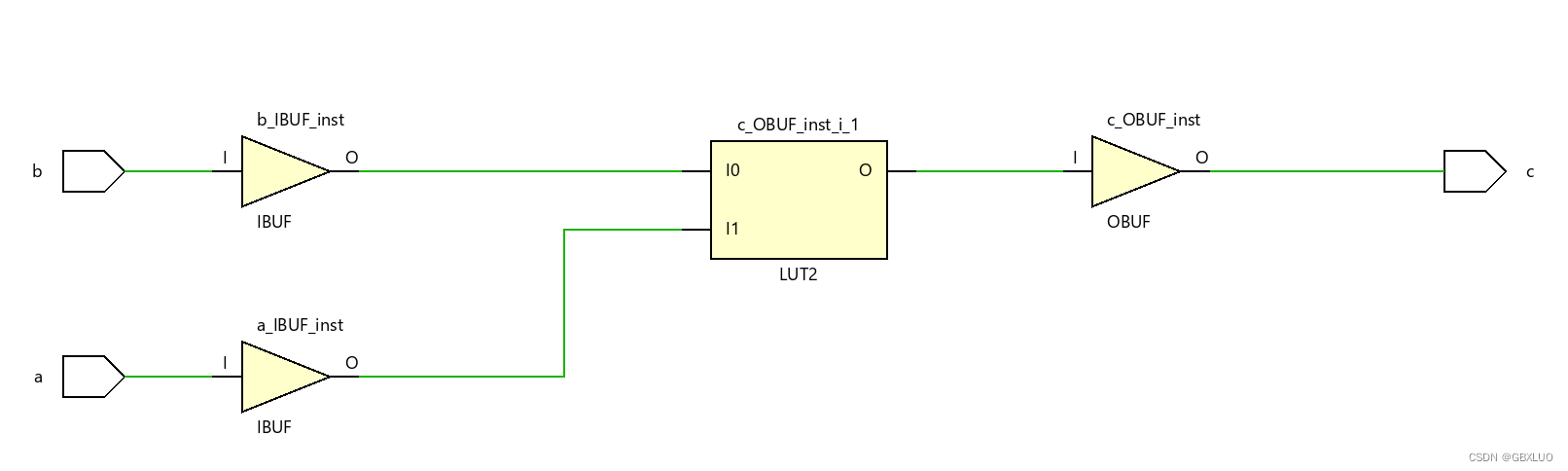
Verilog综合出来的图
Verilog写代码时需要清楚自己综合出来的是组合逻辑、锁存器还是寄存器。
甚至,有时写的代码有误,vivado不能识别出来,这时打开综合后的schematic简单查看一下是否综合出想要的结果。
比如:误将一个always模块重复一遍,vivado没有识别出来导致没有生成想要的状态机,打开综合后的schematic一看,被优化掉了。
一、部分Verilog语句综合出来的原理图
1.1 综合出组合逻辑
以下四种写法综合出来的schematic一样。




1.2 综合出锁存器-Latch


锁存器容易产生glitch(毛刺),少用。
1.3 综合出寄存器


二、对应的部分原语
-
IBUF/IBUFG
IBUF是引脚的输入缓冲器。
Vivado识别到输入引脚后会自动加上IBUFG模块(这里IBUFG与BUFG什么关系呢?)。

-
OBUF
OBUF是引脚的输出缓冲器。

-
LDCE-锁存器
LDCE:异步清零的latch。
LDPE:异步置位的latch。

CLR置低位,高有效。
GE使能G控制信号。
G为高,D输入赋值给Q,电平触发。
G为低,Q保持
-
FDSE
D Flip-Flop with Clock Enable and Synchronous Set 带时钟使能和同步置位的D触发器。

置位S为高电平时,一个时钟C的上升沿触发导致寄存器置位1;
置位S为低电平,时钟使能CE位为高电平时,一个时钟C的上升沿触发寄存器FDCE的输出端Q装载数据口的数据D 。
三、语法不报错,综合报错
3.1 wire型变量不能使用非阻塞赋值-vivado语法虽未报错,但不能综合


procedural assigment to a non-register c is not permitted
不允许对非寄存器c进行程序赋值
四、参考链接:
ug471_7Series_SelectIO
Xilinx 7系 FPGA片上资源之触发器 FDCE FDPE FDRE FDSE-CSDN博客
xilinx FPGA触发器和锁存器_fpga ldce-CSDN博客
相关文章:
Verilog综合出来的图
Verilog写代码时需要清楚自己综合出来的是组合逻辑、锁存器还是寄存器。 甚至,有时写的代码有误,vivado不能识别出来,这时打开综合后的schematic简单查看一下是否综合出想要的结果。 比如:误将一个always模块重复一遍,…...

KT-H6测距模块标品,测距范围1500m,demo报价1000RMB,批量报价500RMB
激光测距传感器是一种用于测量距离的模块,通常由传感器和相关电子设备组成,测距模块可以集成到各种设备和系统中,以实现准确的测距和定位功能。KT-H6系列激光测距模块,为自主研发,激光波长905nm的激光器,专为热成像、夜视仪、无人机、安防、瞄具等产品定身打造,其优点是…...
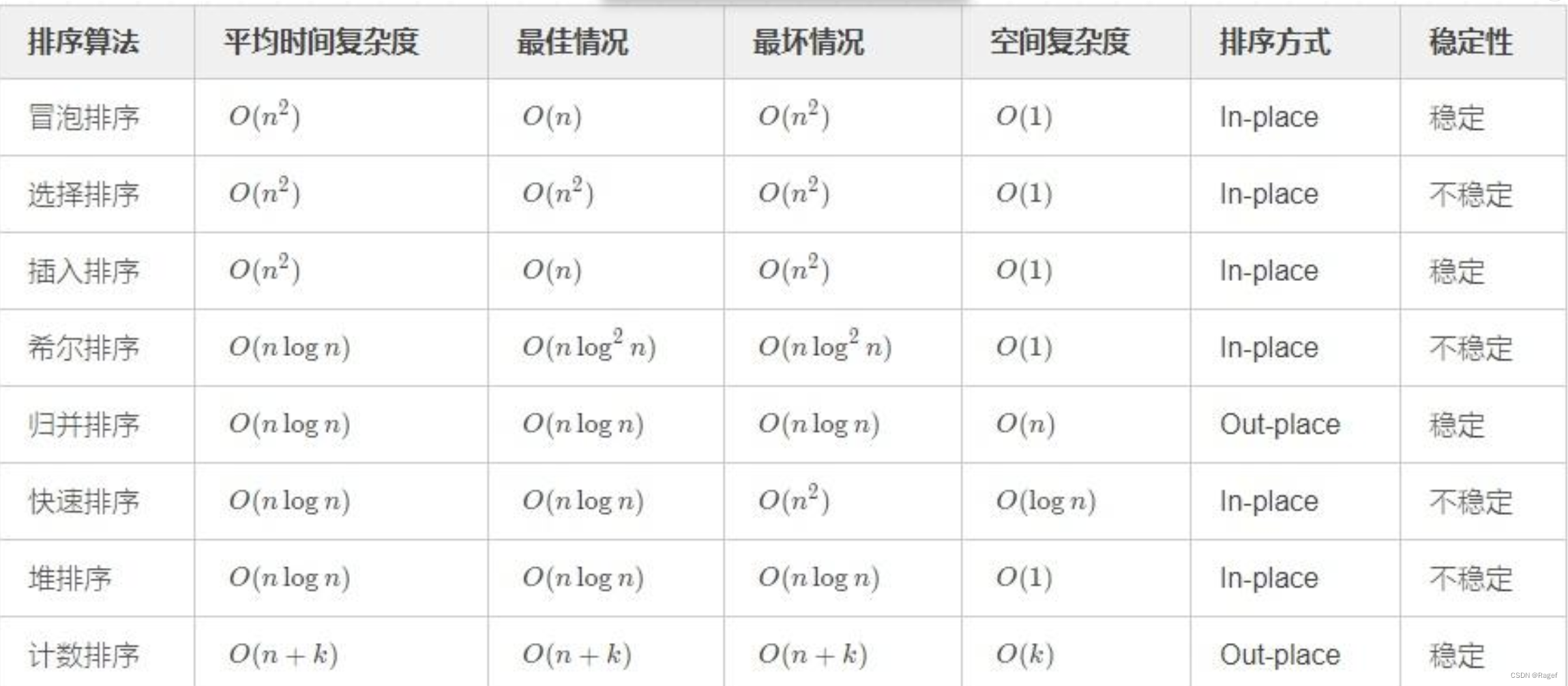
C数据结构:排序
目录 冒泡排序 选择排序 堆排序 插入排序 希尔排序 快速排序 hoare版本 挖坑法 前后指针法 快速排序优化 三数取中法 小区间优化 快速排序非递归 栈版本 队列版本 归并排序 归并排序非递归 编辑 计数排序 各排序时间、空间、稳定汇总 冒泡排序 void Bub…...

【Python】在 Pandas 中使用 AdaBoost 进行分类
我们都找到天使了 说好了 心事不能偷藏着 什么都 一起做 幸福得 没话说 把坏脾气变成了好沟通 我们都找到天使了 约好了 负责对方的快乐 阳光下 的山坡 你素描 的以后 怎么抄袭我脑袋 想的 🎵 薛凯琪《找到天使了》 在数据科学和机器学习的工作…...
)
持续总结中!2024年面试必问 20 道并发编程面试题(九)
上一篇地址:持续总结中!2024年面试必问 20 道并发编程面试题(八)-CSDN博客 十七、请解释什么是Callable和FutureTask。 Callable和FutureTask是Java并发API中的重要组成部分,它们用于处理可能产生结果的异步任务。 …...
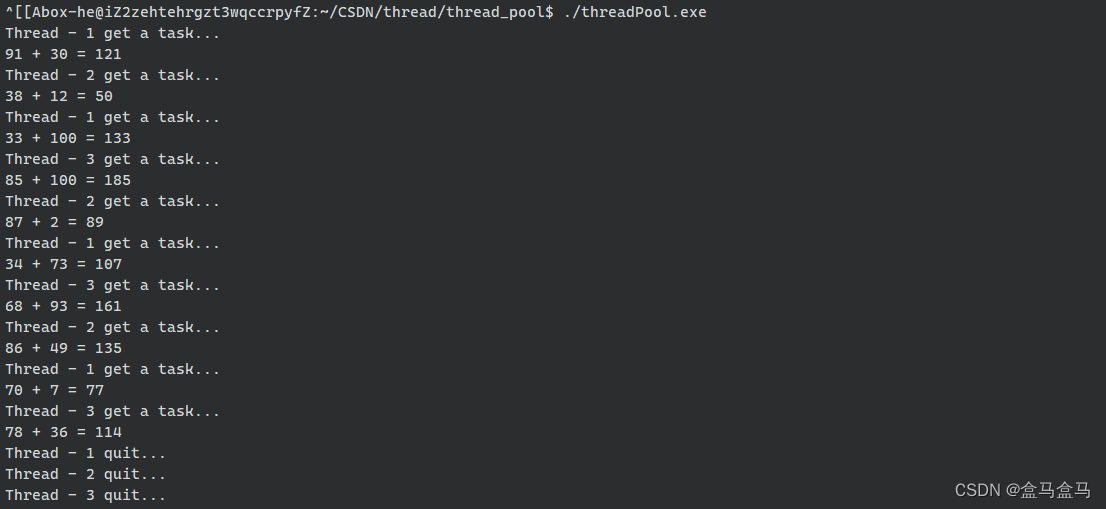
Linux:线程池
Linux:线程池 线程池概念封装线程基本结构构造函数相关接口线程类总代码 封装线程池基本结构构造与析构初始化启动与回收主线程放任务其他线程读取任务终止线程池测试线程池总代码 线程池概念 线程池是一种线程使用模式。线程过多会带来调度开销,进而影…...

集成学习方法:Bagging与Boosting的应用与优势
个人名片 🎓作者简介:java领域优质创作者 🌐个人主页:码农阿豪 📞工作室:新空间代码工作室(提供各种软件服务) 💌个人邮箱:[2435024119qq.com] 📱…...

JEnv-for-Windows 2 java版本工具的安装使用踩坑
0.环境 windows11pro 1.工具下载 GitHub - Mu-L/JEnv-for-Windows: Change your current Java version with one line or JEnv-for-Windows:Change your current Java version with one line - GitCode 2.执行jenv 初始化 2.1 问题:PowerShell 未对文件\XXX.…...
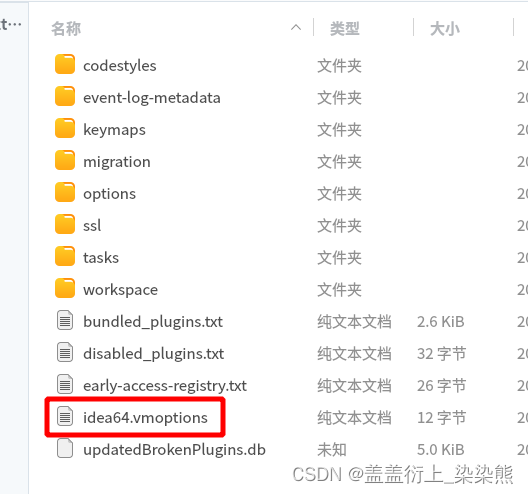
linux中: IDEA 由于JVM 设置内存过小,导致打开项目闪退问题
1. 找到idea安装目录 由于无法打开idea,只能找到idea安装目录 在linux(debian/ubuntu)中idea的插件默认安装位置和配置文件在哪里? 默认路径: /home/当前用户名/.config/JetBrains/IntelliJIdea2020.具体版本号/options2. 找到jvm配置文件 IDEA安装…...

d3.js获取流程图不同的节点
在D3.js中,获取流程图中不同的节点通常是通过选择SVG元素并使用数据绑定来实现的。流程图的节点可以通过BPMN、JSON或其他数据格式定义,然后在D3.js中根据这些数据动态生成和选择节点。 以下是一个基本的示例,展示如何使用D3.js选择和操作流…...

MFC socket编程-服务端和客户端流程
MFC 提供了一套丰富的类库来简化 Windows 应用程序的网络编程。以下是使用 MFC 进行 socket 编程时服务端和客户端的基本流程: 服务端流程: 初始化 Winsock: 调用 AfxSocketInit 初始化 Winsock 库。 创建 CSocket 或 CAsyncSocket 对象&am…...

22.1 正则表达式-定义正则表达式、正则语法
1.定义正则表达式 正则表达式意在描述隐藏在数据中的某种模式或规则。 例如:下面的几个字符串看似各不相同: slimshady999roger1813Wagner但看似不同的数据却隐藏着相同的特征: 仅由英语字母和数字组成英语字母有小写也有大写总字符数介于 …...
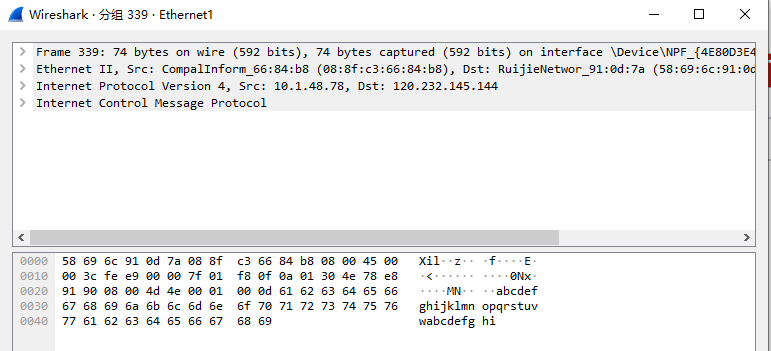
网络数据包抓取与分析工具wireshark的安及使用
WireShark安装和使用 WireShark是非常流行的网络封包分析工具,可以截取各种网络数据包,并显示数据包详细信息。常用于开发测试过程中各种问题定位。 1 任务目标 1.1 知识目标 了解WireShark的过滤器使用,通过过滤器可以筛选出想要分析的内容 掌握Wir…...
Docker镜像技术剖析
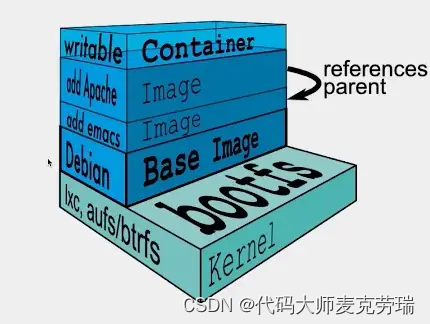
目录 1、概述1.1 什么是镜像?1.2 联合文件系统UnionFS1.3 bootfs和rootfs1.4 镜像结构1.5 镜像的主要技术特点1.5.1 镜像分层技术1.5.2 写时复制(copy-on-write)策略1.5.3 内容寻址存储(content-addressable storage)机制1.5.4 联合挂载(union mount)技术 2.机制原理…...
log4j漏洞学习
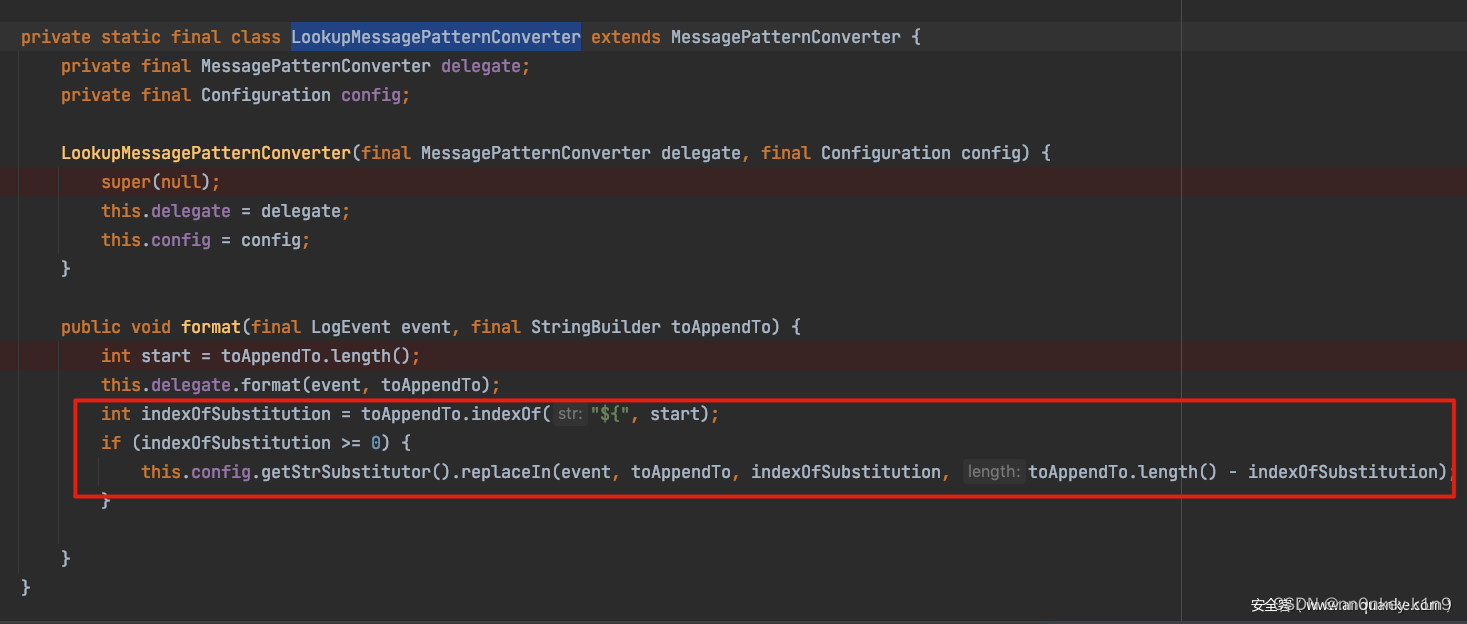
log4j漏洞学习 总结基础知识属性占位符之Interpolator(插值器)模式布局日志级别 Jndi RCE CVE-2021-44228环境搭建漏洞复现代码分析日志记录/触发点消息格式化 Lookup 处理JNDI 查询触发条件敏感数据带外漏洞修复MessagePatternConverter类JndiManager#l…...

架构设计 - WEB项目的基础序列化配置
摘要:web项目中做好基础架构(redis,json)的序列化配置有重要意义 支持复杂数据结构:Redis 支持多种不同的数据结构,如字符串、哈希表、列表、集合和有序集合。在将这些数据结构存储到 Redis 中时,需要将其序列化为字节…...
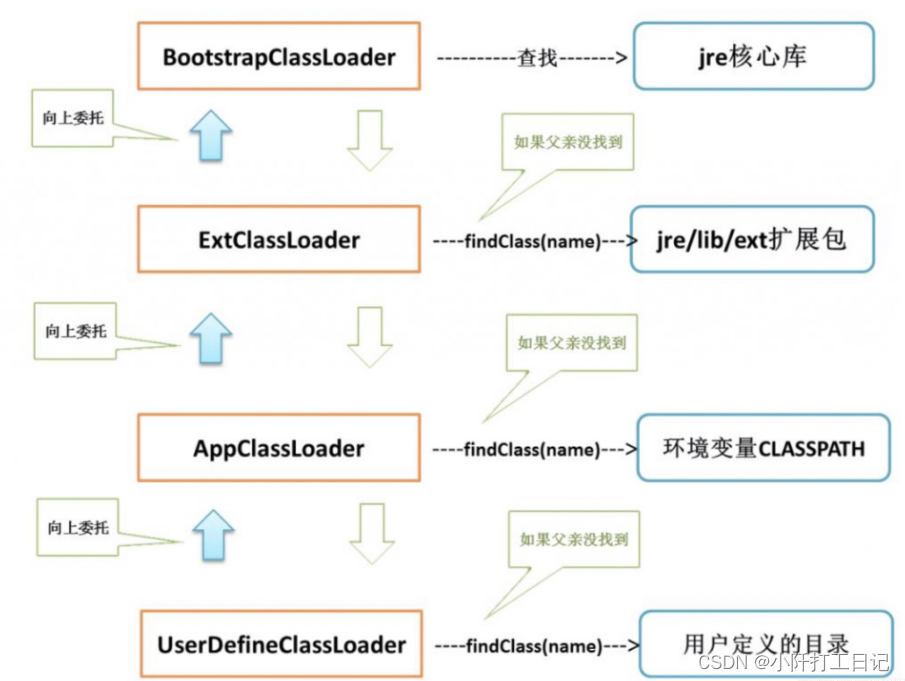
java(JVM)
JVM Java的JVM(Java虚拟机)是运行Java程序的关键部件。它不直接理解或执行Java源代码,而是与Java编译器生成的字节码(Bytecode)进行交互。下面是对Java JVM更详尽的解释: 1.字节码: 当你使用J…...

【网络安全】【深度学习】【入侵检测】SDN模拟网络入侵攻击并检测,实时检测,深度学习【二】
文章目录 1. 习惯终端2. 启动攻击3. 接受攻击4. 宿主机查看h2机器 1. 习惯终端 上次把ubuntu 22自带的终端玩没了,治好用xterm: 以通过 AltF2 然后输入 xterm 尝试打开xterm 。 然后输入这个切换默认的终端: sudo update-alternatives --co…...

飞腾银河麒麟V10安装Todesk
下载安装包 下载地址 https://www.todesk.com/linux.html 安装 yum makecache yum install libappindicator-gtk3-devel.aarch64 rpm -ivh 下载的安装包文件后台启动 service todeskd start修改配置 编辑 /opt/todesk/config/config.ini 移除自动更新临时密码 passupda…...
JWT令牌、过滤器Filter、拦截器Interceptor
目录 JWT令牌 简介 JWT生成 解析JWT 登陆后下发令牌 过滤器(Filter) Filter快速入门 Filter拦截路径 过滤器链 登录校验Filter-流程 拦截器(Interceptor) Interceptor 快速入门 拦截路径 登录校验流程 JWT令牌 简介 全称:JSON Web Token(https://iwt.io/) …...

Honey Select 2终极优化指南:HS2-HF Patch完整解决方案
Honey Select 2终极优化指南:HS2-HF Patch完整解决方案 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch HS2-HF Patch是专为《Honey Select 2》游戏设…...

移动时代数据自主:从云端依赖到物理存储的范式转变
1. 个人通信的现状与核心矛盾我们正处在一个数据爆炸的时代。每天,从清晨被手机闹钟唤醒,到深夜刷完最后一条短视频,我们每个人都在无意识地产生、消费和交换着海量数据。文章里提到一个让我印象深刻的数字:平均每人每天要处理35G…...

HTML5 教程
HTML5 教程 引言 HTML5,作为现代网页开发的核心技术之一,自从推出以来就受到了广泛的关注和认可。它不仅改进了原有的HTML特性,还引入了新的元素和API,使得网页设计和开发更加高效、强大。本教程旨在为您提供一个全面的HTML5学习路径,帮助您快速掌握HTML5的基础知识和高…...

40_《智能体微服务架构企业级实战教程》智能助手主应用服务之工具类封装
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...

别再让专利证书变废纸!手把手教你用6步法写出能维权的权利要求书
从技术到法律:6步打造高价值专利权利要求的实战指南 刚拿到专利证书的工程师小王,在展会上发现竞争对手的产品几乎照搬了自己的发明。他信心满满地提起诉讼,却因权利要求书中"数据传输模块"的表述过于宽泛而败诉——法院认为该描述…...

从业者必看:医药资质认证服务核心知识梳理
如果你是初创医疗器械贸易商创始人、医美诊所创业者、连锁药店负责人或是医药电商运营人员,正面临缺证无法入驻平台、自行办理流程繁琐反复被驳回、赶大促节点急需下证等问题,想要了解医药资质认证服务相关内容,这篇科普内容会为你梳理清楚全…...

工程实践:AI 编程从提示词走向流水线,才需要 API 中转站
这类内容的核心判断应该换一下:用户不是先想买 API,中间才想到 Claude / Codex;很多时候正相反,是先想用 Claude / Codex 提升开发效率,才开始寻找稳定、可接入、可支付、可迁移的 API 入口。目标用户画像想把需求分析…...

Betaflight飞行控制固件:5分钟快速上手指南与完整配置教程
Betaflight飞行控制固件:5分钟快速上手指南与完整配置教程 【免费下载链接】betaflight Open Source Flight Controller Firmware 项目地址: https://gitcode.com/gh_mirrors/be/betaflight 还在为穿越机飞行不稳定而烦恼吗?🤔 想体验…...
)
用PyTorch复现DKT模型:从Assistment数据集处理到LSTM训练全流程(附完整代码)
用PyTorch构建DKT模型:从数据预处理到LSTM实战全解析 在教育技术领域,追踪学生知识掌握程度一直是个核心挑战。想象一下,当学生在在线学习平台上完成一系列数学题时,系统如何预测他们下一步可能遇到的困难?这正是深度知…...

时间序列预测总翻车?试试用Python实现嵌套交叉验证来守住‘未来’数据
时间序列预测中的嵌套交叉验证:用Python守住数据的时间壁垒 当你在预测下周的销售额、下个月的电力负荷或明天的股价时,最可怕的不是模型不够复杂,而是它偷偷"作弊"了——通过窥探未来的数据来假装自己很聪明。这种时间序列预测中的…...