DeepSpeed Monitoring Comm. Logging
Monitoring
支持多种后端:Tensorboard、WandB、Comet、CSV文件;
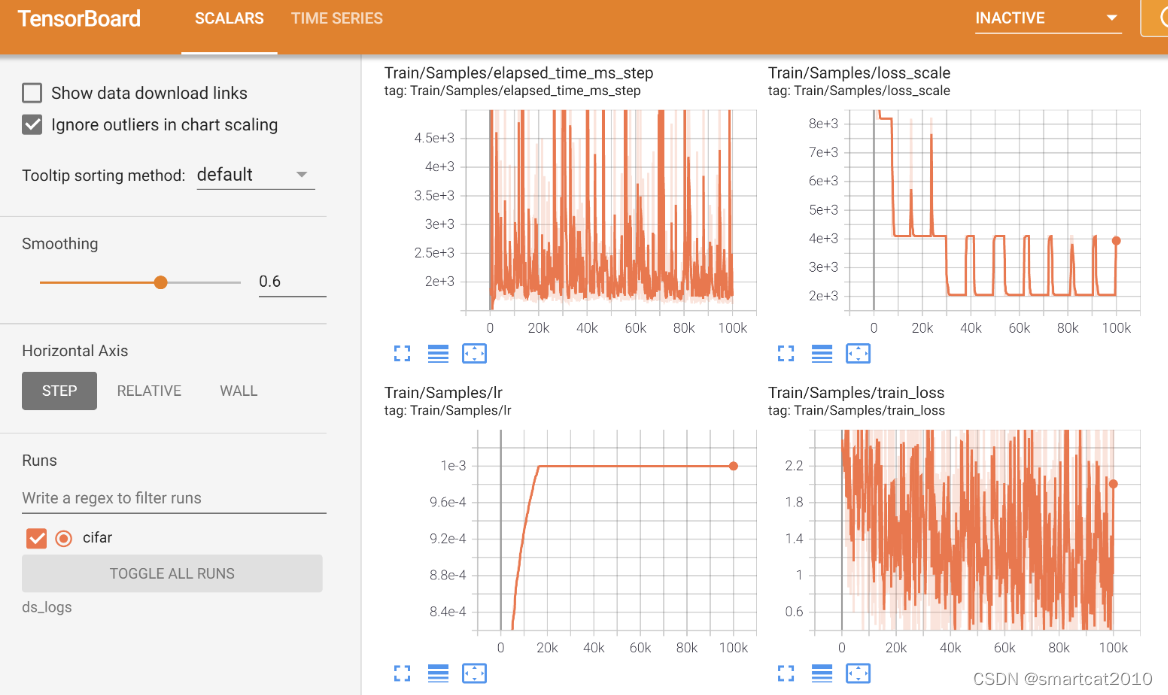
TensorBoard例子:
自动监控:DeepSpeed自动把重要metric记录下来。只需在配置文件里enable相应的看板后端即可:
{"tensorboard": {"enabled": true,"output_path": "output/ds_logs/","job_name": "train_bert"}"wandb": {"enabled": true,"team": "my_team","group": "my_group","project": "my_project"}"comet": {"enabled": true,"project": "my_project","experiment_name": "my_experiment"}"csv_monitor": {"enabled": true,"output_path": "output/ds_logs/","job_name": "train_bert"} }自定义监控:
# Step 1: Import monitor (and DeepSpeed config, if needed)
from deepspeed.monitor.monitor import MonitorMaster
from deepspeed.runtime.config import DeepSpeedConfig# Step 2: Initialized monitor with DeepSpeed config (get DeepSpeed config object, if needed)
ds_config = DeepSpeedConfig("ds_config.json")
monitor = MonitorMaster(ds_config.monitor_config)for epoch in range(2):
running_loss = 0.0
for i, data in enumerate(trainloader):
pre = time.time()
inputs, labels = data[0].to(model_engine.local_rank), data[1].to(
model_engine.local_rank)
if fp16:
inputs = inputs.half()
outputs = model_engine(inputs)
loss = criterion(outputs, labels)model_engine.backward(loss)
model_engine.step()
post = time.time()
# Step 3: Create list of 3-tuple records (single entry in this case)
events = [("Time per step", post-pre, model_engine.global_samples)]
# Step 4: Call monitor.write_events on the list from step 3
monitor.write_events(events)[("Time per step", post-pre, model_engine.global_samples)],<表名,纵轴值,横轴值>
通信Logging
注意:加了logging, 所有通信将改为同步,对性能会有伤害。
所有deepspeed.comm下的通信,都将被统计上。
在配置文件里打开:
"comms_logger": {"enabled": true,"verbose": false,"prof_all": true,"debug": false }verbose: 边跑,边把发生的通信,一条条写下来。例:
[2022-06-26 01:39:55,722] [INFO] [logging.py:69:log_dist] [Rank 0] rank=0 | comm op: reduce_scatter_tensor | time (ms): 9.46 | msg size: 678.86 MB | algbw (Gbps): 1204.52 | busbw (Gbps): 1129.23 [2022-06-26 01:39:56,470] [INFO] [logging.py:69:log_dist] [Rank 0] rank=0 | comm op: all_gather_into_tensor | time (ms): 0.11 | msg size: 6.0 MB | algbw (Gbps): 954.41 | busbw (Gbps): 894.76 [2022-06-26 01:39:56,471] [INFO] [logging.py:69:log_dist] [Rank 0] rank=0 | comm op: all_gather_into_tensor | time (ms): 0.08 | msg size: 6.0 MB | algbw (Gbps): 1293.47 | busbw (Gbps): 1212.63algbw: algorithm bandwidth, 发生的通信size/实际通信时间;
busbw: 硬件理论带宽;是个固定值;
algbw如果比busbw小太多,说明糟糕,有待进一步优化;
总结式:deepspeed.comm.log_summary()
Comm. Op Message Size Count Total Latency(ms) Avg Latency(ms) tput_avg (Gbps) busbw_avg (Gbps) broadcast2.0 KB 146 11.12 0.08 0.43 0.4198.25 MB 1 8317.12 8317.12 0.20 0.19 reduce_scatter_tensor678.86 MB 40 602.29 9.69 1468.06 1376.31展示通信等待时长:
dist.log_summary(show_straggler=True)这么计算的:(一次组播通信里,每个rank的完成时间,减去,所有rank里完成最快的,这些"等待"时间,加和到一起)
straggler = sum(t_collectives - allreduce(t_collectives, MIN))
相关文章:
DeepSpeed Monitoring Comm. Logging
Monitoring 支持多种后端:Tensorboard、WandB、Comet、CSV文件; TensorBoard例子: 自动监控:DeepSpeed自动把重要metric记录下来。只需在配置文件里enable相应的看板后端即可: {"tensorboard": {"enabl…...
关于INCA的几个实用功能
01--VUI窗口设计 这个可以按照自己的想法设计INCA观测或标定窗口 首先进入到INCA的环境内,点击实验→加载VUI窗口 选择空的窗口 打开后如下所示: 点击UI开发模式,如下图 如下: 添加标定量、观测量、示波器 窗口的大小需要在开发…...

Mamaba3--RNN、状态方程、勒让德多项式
Mamaba3–RNN、状态方程、勒让德多项式 一、简单回顾 在Mamba1和Mamba2中分别介绍了RNN和状态方程。 下面从两个图和两个公式出发,对RNN和状态方程做简单的回顾: R N N : s t W s t − 1 U x t ; O t V s t RNN: s_t Ws_{t-1}Ux_t&…...
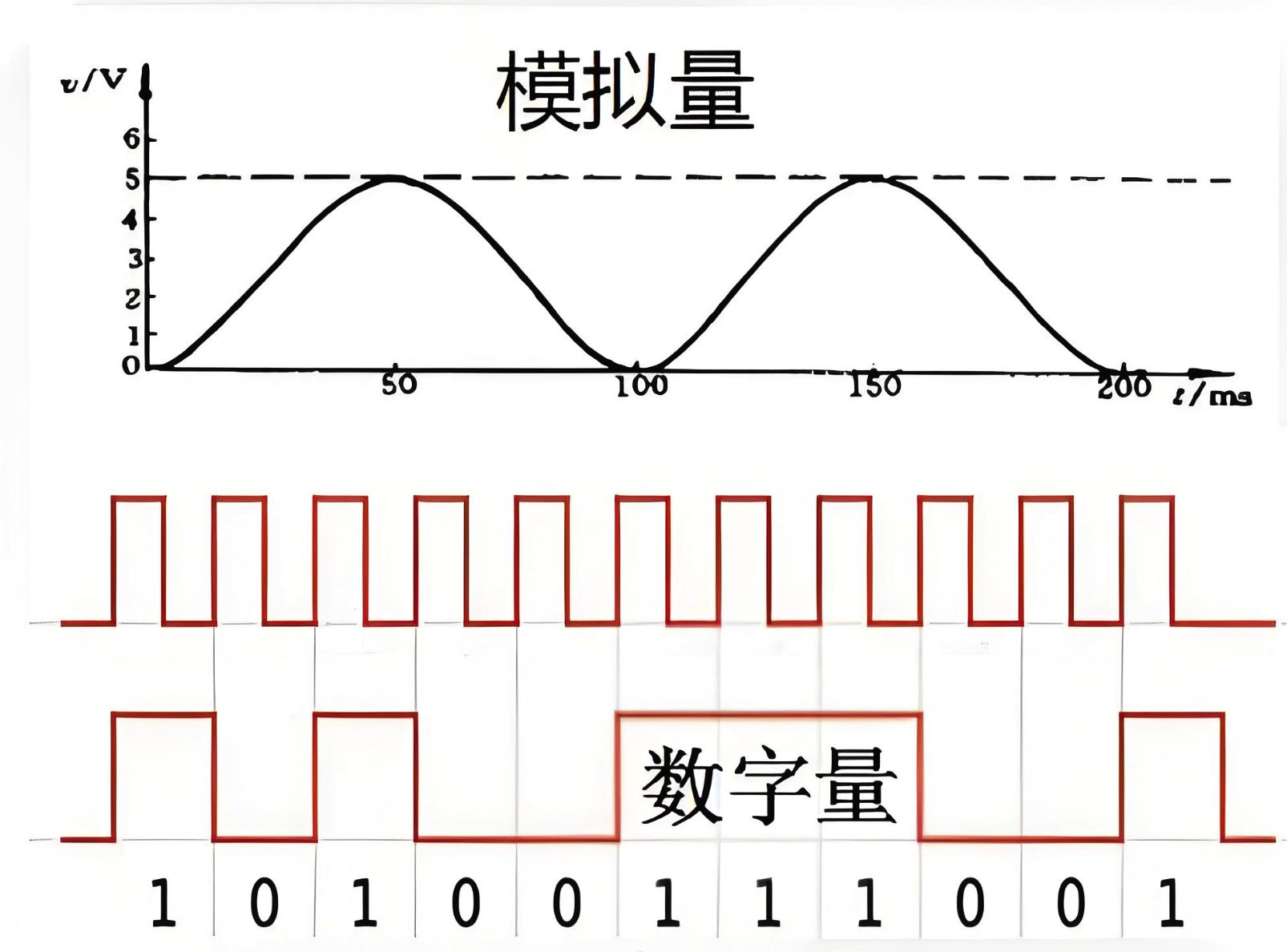
PLC模拟量和数字量到底有什么区别?
PLC模拟量和数字量的区别 在工业自动化领域,可编程逻辑控制器(PLC)是控制各种机械设备和生产过程的核心组件。PLC通过处理模拟量和数字量来实现对工业过程的精确控制。了解模拟量和数字量的区别对于设计高效、可靠的自动化系统至关重要。 1. …...

html中如何写一个提示框,css画一个提示框
在HTML中,提示框通常使用<div>元素来创建,然后使用CSS进行样式化。以下是一个示例,展示如何在HTML中写一个提示框,并使用CSS来设计其外观。 HTML 首先,创建一个HTML文件,其中包含一个提示框的结构&…...

ExoPlayer 学习笔记
https://www.51cto.com/article/777840.html ExoPlayer支持多种媒体格式和流媒体协议的播放器 播放视频:player.play()暂停视频:player.pause()停止播放:player.stop() Media3 ExoPlayer | Android media | Android Developers implem…...

汽车IVI中控开发入门及进阶(二十七):车载摄像头vehicle camera
前言: 在车载IVI、智能座舱系统中,有一个重要的应用场景就是视频。视频应用又可分为三种,一种是直接解码U盘、SD卡里面的视频文件进行播放,一种是手机投屏,就是把手机投屏软件已视频方式投屏到显示屏上显示,另外一种就是对视频采集设备(主要就是摄像头Camera)的视频源…...
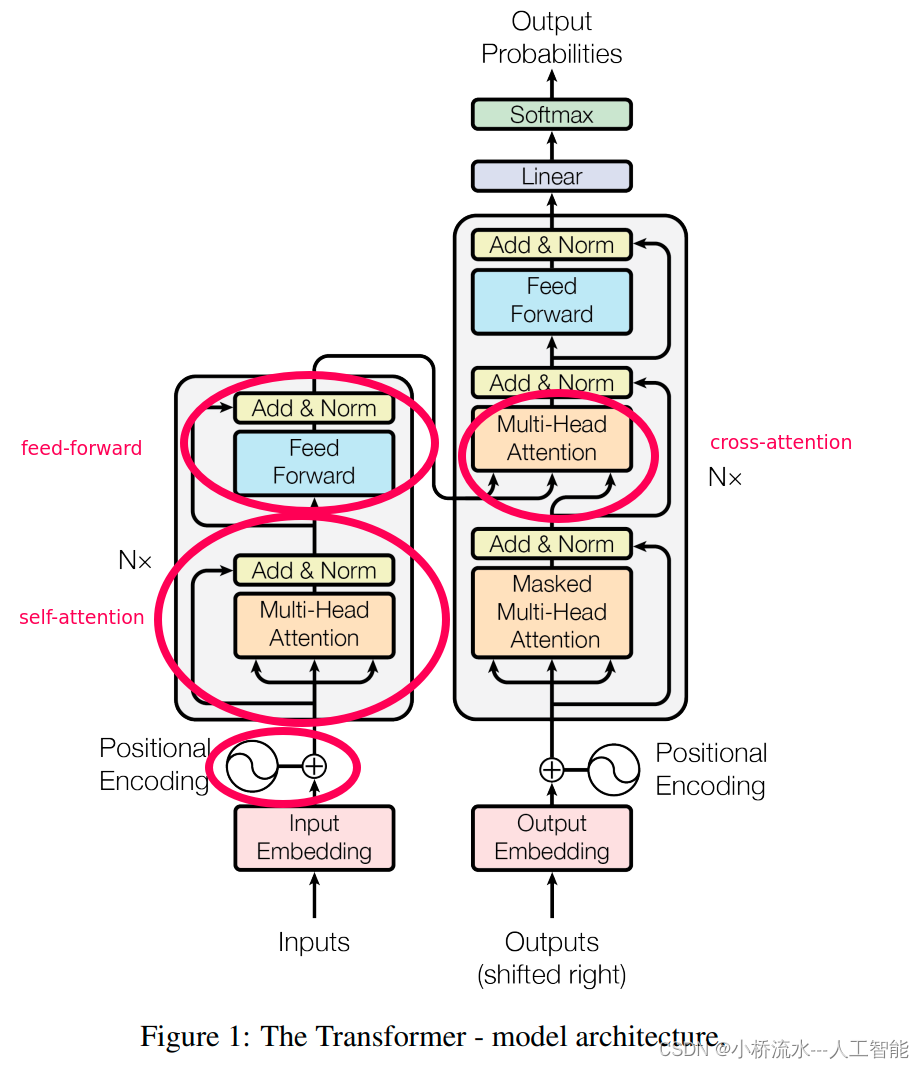
Transformer模型:未来的改进方向与潜在影响
Transformer模型:未来的改进方向与潜在影响 自从2017年Google的研究者们首次提出Transformer模型以来,它已经彻底改变了自然语言处理(NLP)领域的面貌。Transformer的核心优势在于其“自注意力(Self-Attention…...

ROS 激光雷达
ROS 激光雷达 基本工作原理 激光雷达(LIDAR,Light Detection and Ranging)是一种用于测量距离的远程感应技术。它通过向目标发射激光并分析反射回来的光来测量目标与激光发射源之间的距离。激光雷达广泛应用于多种领域,包括地理…...

杂说咋说-关于城市化发展和城市治理的几点建议(浙江借鉴)
杂说咋说-关于城市化发展和城市治理的几点建议(浙江借鉴) 近年来,浙江省坚持一张蓝图绘到底,推动城市化发展和城市治理不断迈上新台阶,全省城市化水平和城市治理能力牢牢居于全国第一方阵。当前,国内外环境…...

Linux 常用命令 - which【定位可执行文件的位置】
简介 which 命令源自于英文单词 "which",用于在环境变量 PATH 所指定的路径中搜索某个可执行文件或链接(如一个系统命令)的位置,并返回第一个搜索结果。这个命令会遍历 PATH 环境变量中的所有路径,直到找到…...

js文件导出功能
效果图: 代码示例: <!DOCTYPE html> <html> <head lang"en"><meta charset"UTF-8"><title>html 表格导出道</title><script src"js/jquery-3.6.3.js"></script><st…...

PHP转Go系列 | 字符串的使用姿势
大家好,我是码农先森。 输出 在 PHP 语言中的输出比较简单,直接使用 echo 就可以。此外,在 PHP 中还有一个格式化输出函数 sprintf 可以用占位符替换字符串。 <?phpecho 码农先森; echo sprintf(码农:%s, 先森);在 Go 语言中调用它的输…...
vue关于:deep穿透样式的理解
情况一 子组件: <div class"child"><div class"test_class">test_class<div class"test1">test1<div class"test2">test2</div></div></div></div>父组件: …...

算法 |数字计数
给出n个数字,请你求出在给出的这n个数字当中,最大的数字与次大的数字之差,最大的数字与次小的数字之差,次大的数字与次小的数字之差,次大的数字与最小的数字之差. 易错点 1 1 2 3 4 4 次小不是a[1]了 次大也不是a[n-2]了 #include<bits/stdc.h> using namespace std; …...
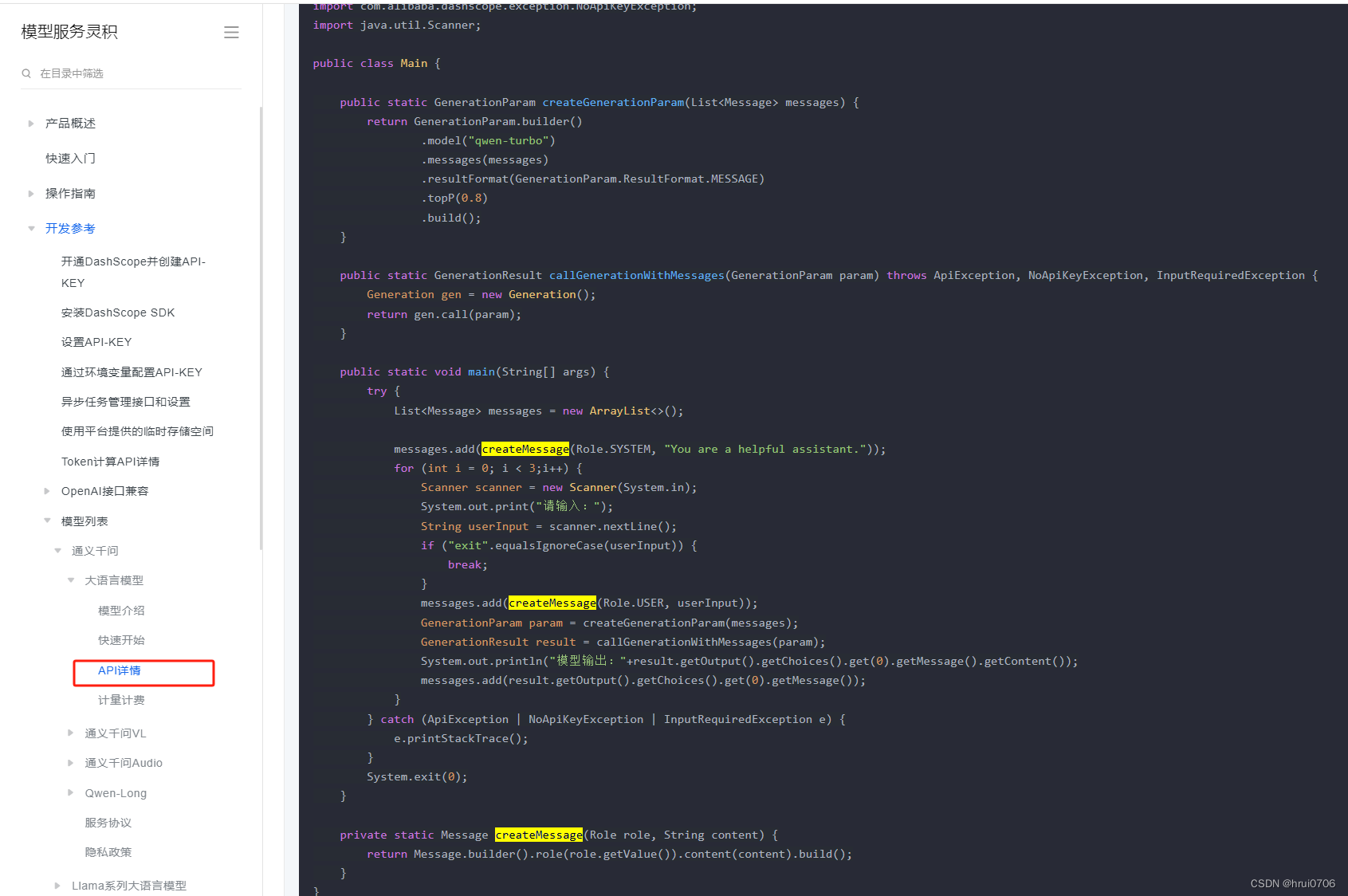
通义千问调用笔记
如何使用通义千问API_模型服务灵积(DashScope)-阿里云帮助中心 package com.ruoyi.webapp.utils;import com.alibaba.dashscope.aigc.generation.Generation; import com.alibaba.dashscope.aigc.generation.GenerationOutput; import com.alibaba.dashscope.aigc.generation.G…...

Linux常见的压缩文件种类与对应的压缩解压方法
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...

LNMP网站架构
一、安装nginx服务 1、关闭防火墙和核心防护 systemctl stop firewalld systemctl disable firewalld setenforce 0 2、安装依赖包 yum -y install pcre-devel zlib-devel openssl-devel gcc gcc-c make 3、创建运行用户 useradd -M -s /sbin/nologin nginx 4、编译安装…...

排序算法及源代码
堆排序: 在学习堆之后我们知道了大堆和小堆,对于大堆而言第一个节点就是对大值,对于小堆而言,第一个值就是最小的值。如果我们把第一个值与最后一个值交换再对最后一个值前面的数据重新建堆,如此下去就可以实现建堆排…...

力扣第206题“反转链表”
在本篇文章中,我们将详细解读力扣第206题“反转链表”。通过学习本篇文章,读者将掌握如何使用迭代和递归的方法来解决这一问题,并了解相关的复杂度分析和模拟面试问答。每种方法都将配以详细的解释,以便于理解。 问题描述 力扣第…...

3步精通FanControl:从噪音难题到智能散热的技术蜕变
3步精通FanControl:从噪音难题到智能散热的技术蜕变 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/F…...
)
el-tabs报错Cannot read properties of null (reading ‘insertBefore‘)
使用elementui-plus的tabs组件在开发中遇到的一个问题,分析了代码,发现逻辑没有任何问题,但是点击tab切换就会报错:Uncaught (in promise) TypeError: Cannot read properties of null (reading insertBefore)调试发现parent参数是…...

AI 大模型落地系列|Eino 组件核心篇:ChatTemplate 为什么不是字符串拼接
声明:本文数据源于官方文档与官方实现,重点参考 ChatTemplate 使用说明。 为什么很多人学 Eino 后,写 Prompt 时还是把 ChatTemplate 用成了字符串拼接?1. ChatTemplate 是什么,不是什么2. 接口虽短,但起的…...

rBase64:嵌入式系统零堆分配BASE64编解码库
1. rBase64 库深度解析:面向嵌入式系统的高性能 BASE64 编解码实现BASE64 是一种将任意二进制数据映射为 ASCII 字符子集的编码方案,广泛应用于嵌入式通信协议(如 MQTT payload、HTTP Basic Auth、CoAP 传输)、固件 OTA 升级包签名…...

Arduino轻量级哈希表UnorderedMap实战指南
1. 项目概述UnorderedMap是一款专为 Arduino 平台设计的轻量级哈希表(Hash Table)实现,其核心目标是在资源极度受限的微控制器环境中提供高效、可靠、内存可控的键值对(Key-Value Pair)存储能力。它并非 C STLstd::uno…...

51单片机定时器初值计算与Proteus仿真
51单片机定时器初值计算方法详解1. 定时器基础原理1.1 单片机定时器工作模式51系列单片机内置的定时器/计数器模块是嵌入式系统中实现精确时间控制的核心部件。定时器本质上是一个特殊功能的寄存器,通过累加时钟脉冲实现计时功能。根据位数不同,51单片机…...

电赛小车避坑指南:从2011到2024,那些年我们踩过的传感器和通信模块的‘坑’
电赛小车避坑指南:从2011到2024,那些年我们踩过的传感器和通信模块的"坑" 参加全国大学生电子设计竞赛的同学们都知道,小车控制类赛题一直是热门选项。从2011年的双车自主超车到2024年的自动行驶小车,这些题目看似简单&…...
)
好用还专业!高效论文写作全流程AI论文网站推荐(2026 最新)
论文写作全流程可拆解为文献调研→选题/开题→大纲/初稿→文献综述→降重/去AI味→润色/格式→查重/投稿七大环节,以下工具按环节精准匹配,兼顾中文适配、降重能力、去AI痕迹、学术合规四大核心需求,覆盖免费/付费、通用/垂直场景。2026年AI论…...

Uvicorn性能调优:异步I/O模型选择与配置指南
Uvicorn性能调优:异步I/O模型选择与配置指南 【免费下载链接】uvicorn An ASGI web server, for Python. 🦄 项目地址: https://gitcode.com/GitHub_Trending/uv/uvicorn Uvicorn作为Python生态中最受欢迎的ASGI服务器,其性能表现直接…...

机械臂robotic-arm--8.snapshot.7
机械臂作为自动化领域的核心设备,其设计精度与功能稳定性直接影响任务执行效率。以robotic-arm--8.snapshot.7为例,其核心作用体现在多维度空间定位与复杂轨迹规划能力上。通过集成高精度伺服电机与闭环控制系统,该型号机械臂可实现亚毫米级重…...