STM32感应开关盖垃圾桶
目录
项目需求
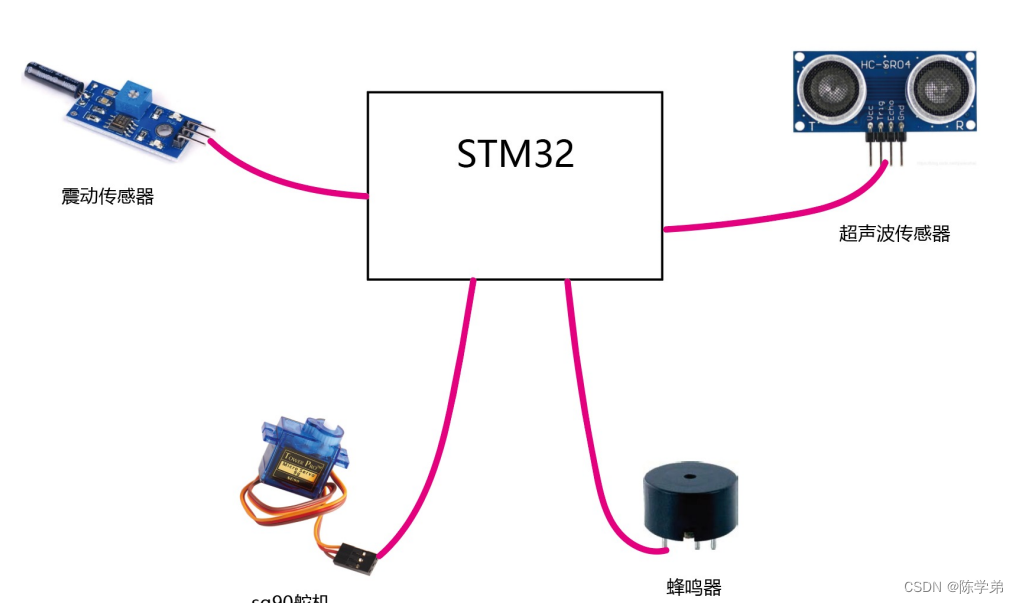
项目框图
编辑
硬件清单
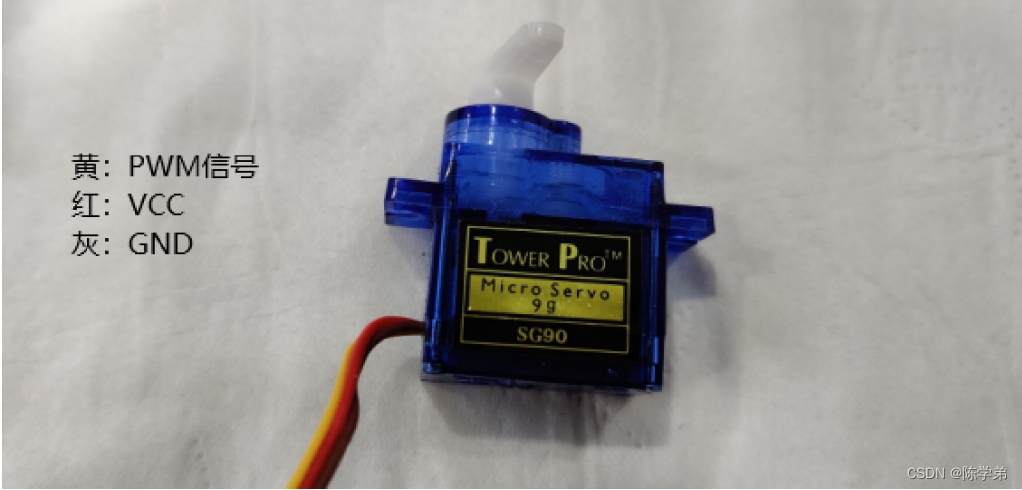
sg90舵机介绍及实战
sg90舵机介绍
角度控制
SG90舵机编程实现
超声波传感器介绍及实战
超声波传感器介绍
超声波编程实战
项目设计及实现
项目需求
- 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
- 发生震动时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
- 按下按键时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
项目框图
硬件清单
sg90舵机介绍及实战
sg90舵机介绍
PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右。
确定周期/频率
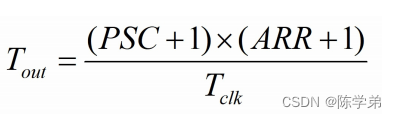
如果周期为20ms,则 PSC=7199,ARR=199
角度控制
- 0.5ms-------------0度; 2.5% 对应函数中CCRx为5
- 1.0ms------------45度; 5.0% 对应函数中CCRx为10
- 1.5ms------------90度; 7.5% 对应函数中CCRx为15
- 2.0ms-----------135度; 10.0% 对应函数中CCRx为20
- 2.5ms-----------180度; 12.5% 对应函数中CCRx为25

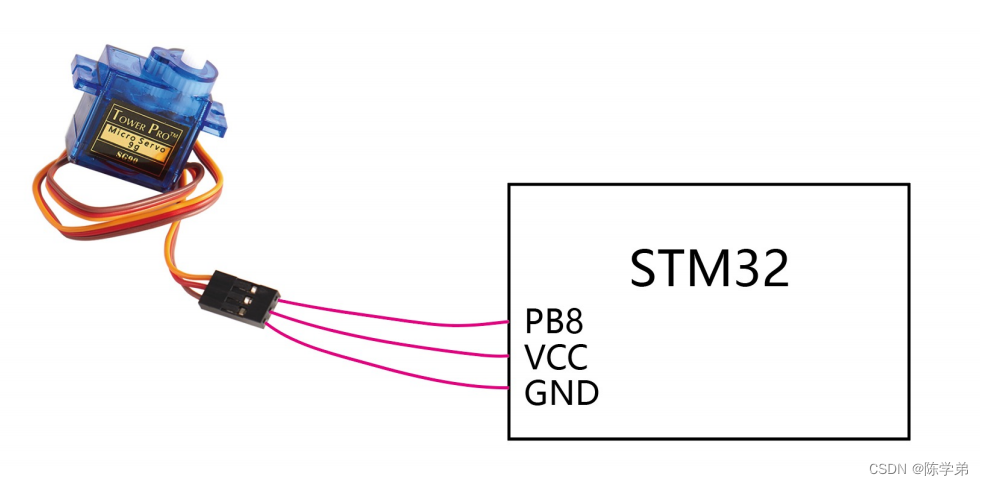
SG90舵机编程实现
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);
while (1)
{HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 10);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 15);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 25);
}超声波传感器介绍及实战
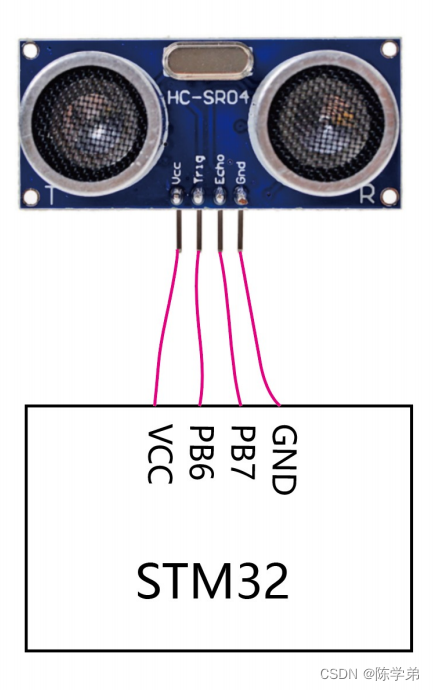
超声波传感器介绍

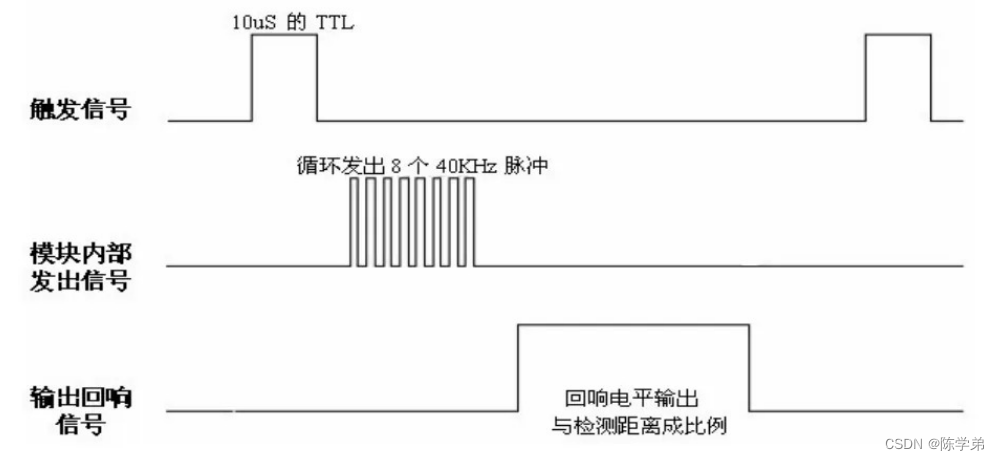
- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间
Echo引脚维持高电平的时间!
- 波发出去的那一下,开始启动定时器
波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离
距离 = 速度 (340m/s)* 时间/2
超声波编程实战
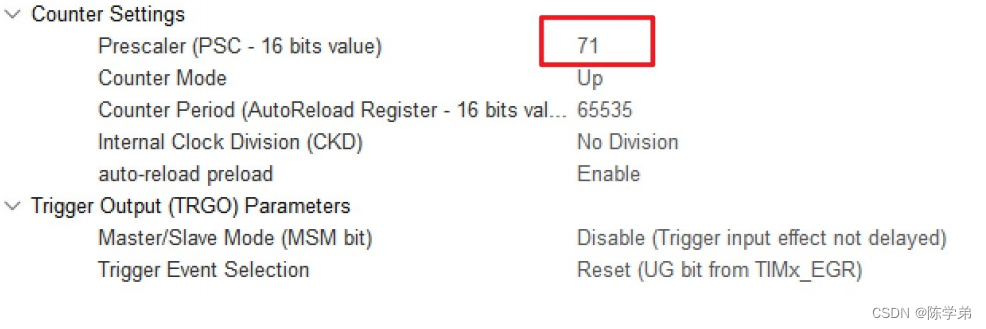
定时器配置:
编写微秒级函数:
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}主函数:
int cnt;
float distance;
while (1)
{//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)distance = cnt*340/2*0.000001*100; //单位:cmif(distance < 5)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);
}项目设计及实现
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define OPEN 1
#define CLOSE 0
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
char flag=CLOSE;
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim4;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM4_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
double get_distance()
{int cnt;//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)return (cnt*340/2*0.000001*100); //单位:cm
}
void openStatusLight()
{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
}
void closeStatusLight()
{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
}
void initSG90_0()
{HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4);//启动定时器4__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);//将舵机置0°
}
void openDusbin()
{if(flag==CLOSE){flag=OPEN;__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15);//将舵机置90°HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);HAL_Delay(100);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);}HAL_Delay(2000);
}void closeDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);//将舵机置0°flag=CLOSE;HAL_Delay(150);
}void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin==GPIO_PIN_0||GPIO_Pin==GPIO_PIN_5){if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET ||HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5)==GPIO_PIN_RESET){openStatusLight();openDusbin();}}}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */float distance;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_TIM4_Init();/* USER CODE BEGIN 2 */initSG90_0();HAL_NVIC_SetPriority(SysTick_IRQn,0,0);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///超声波测距distance=get_distance();if(distance < 10){openStatusLight();//开盖openDusbin();}else{closeStatusLight();//关盖closeDusbin();}}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief TIM2 Initialization Function* @param None* @retval None*/
static void MX_TIM2_Init(void)
{/* USER CODE BEGIN TIM2_Init 0 *//* USER CODE END TIM2_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};/* USER CODE BEGIN TIM2_Init 1 *//* USER CODE END TIM2_Init 1 */htim2.Instance = TIM2;htim2.Init.Prescaler = 71;htim2.Init.CounterMode = TIM_COUNTERMODE_UP;htim2.Init.Period = 65535;htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim2) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */}/*** @brief TIM4 Initialization Function* @param None* @retval None*/
static void MX_TIM4_Init(void)
{/* USER CODE BEGIN TIM4_Init 0 *//* USER CODE END TIM4_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};/* USER CODE BEGIN TIM4_Init 1 *//* USER CODE END TIM4_Init 1 */htim4.Instance = TIM4;htim4.Init.Prescaler = 7199;htim4.Init.CounterMode = TIM_COUNTERMODE_UP;htim4.Init.Period = 199;htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim4) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim4) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_4) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM4_Init 2 *//* USER CODE END TIM4_Init 2 */HAL_TIM_MspPostInit(&htim4);}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4|GPIO_PIN_8, GPIO_PIN_SET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);/*Configure GPIO pin : PA0 */GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pins : PB4 PB6 PB8 */GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_6|GPIO_PIN_8;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pin : PB5 */GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pin : PB7 */GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* EXTI interrupt init*/HAL_NVIC_SetPriority(EXTI0_IRQn, 2, 0);HAL_NVIC_EnableIRQ(EXTI0_IRQn);HAL_NVIC_SetPriority(EXTI9_5_IRQn, 2, 0);HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
相关文章:
STM32感应开关盖垃圾桶
目录 项目需求 项目框图 编辑 硬件清单 sg90舵机介绍及实战 sg90舵机介绍 角度控制 SG90舵机编程实现 超声波传感器介绍及实战 超声波传感器介绍 超声波编程实战 项目设计及实现 项目需求 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖…...

进程跟线程的区别
进程跟线程的区别 文章目录进程跟线程的区别前言一.什么线程二.线程与进程的联系三.线程与进程有什么不同前言 现代所有计算机都能同时做几件事情,当一个用户程序正在运行时,计算机还能同时读取磁盘,并向屏幕打印输出正文.在一个多道操作程序中,cpu由一道程序向另外一道程的切…...

[ICLR 2016] Unsupervised representation learning with DCGANs
目录 IntroductionModel ArchitectureReferencesIntroduction 作者提出了用 CNN 搭建 GAN,使得 GAN 训练更加稳定的一系列准则,并将满足这些设计理念的模型称为 DCGANs (Deep Convolutional GANs). 此外,作者将 trained discriminators 用于图像分类任务,相比于其他无监督算…...

QT编程从入门到精通之十五:“第五章:Qt GUI应用程序设计”之“5.1 UI文件设计与运行机制”之“5.1.2 项目管理文件”
目录 第五章:Qt GUI应用程序设计 5.1 UI文件设计与运行机制 5.1.2 项目管理文件 第五章:Qt GUI应用程序设计 在“Qt 程序创建基础”上,本章将继续深入地介绍Qt Creator设计GUI应用程序的方法...

基于Three.js和MindAR实现的网页端WebAR人脸识别追踪功能的京剧换脸Demo(含源码)
前言 近段时间一直在玩MindAR的功能,之前一直在弄图片识别追踪的功能,发现其强大的功能还有脸部识别和追踪的功能,就基于其面部网格的例子修改了一个国粹京剧的换脸程序。如果你不了解MindAR的环境配置可以先参考这篇文章:基于Mi…...

动态规划思路
拉勾教育版权所有:https://kaiwu.lagou.com/course/courseInfo.htm?courseId3 动态规划思路 1.最优子结构 2.重复计算子机构 3.依靠递归,层层向上传值,所以编程时初始化子结构很重要 动态规划步骤 1.判断动态规划的类型 1.线性规划 >&…...

HTTPS关键词语解释和简单通讯流程
1、 什么是HTTPS HTTPS是基于HTTP的上层添加了一个叫做TLS的安全层,对数据的加密等操作都是在这个安全层中进行处理的,其底层还是应用的HTTP。 2、 什么是对称加密; 加密和解密都是用同一个秘钥 3、 什么是非对称加密; 加密和…...

“前端开发中的三种定时任务及其应用“
前端定时任务是指在一定时间间隔内,自动执行指定的操作或函数。在前端开发中,定时任务被广泛应用于诸如数据更新、定时提醒、定时刷新页面等方面。在本文中,我们将介绍前端中常见的三种定时任务,分别是 setTimeout、setInterval 和…...
| 机考必刷)
华为OD机试题 - 猜字谜(JavaScript)| 机考必刷
更多题库,搜索引擎搜 梦想橡皮擦华为OD 👑👑👑 更多华为OD题库,搜 梦想橡皮擦 华为OD 👑👑👑 更多华为机考题库,搜 梦想橡皮擦华为OD 👑👑👑 华为OD机试题 最近更新的博客使用说明本篇题解:猜字谜题目输入输出描述备注示例一输入输出示例二输入输出思路C…...
python@pyside样式化
文章目录refWidget类创建样式化文件qss引用样式并启动应用ref Styling the Widgets Application - Qt for PythonQt Style Sheets Reference | Qt Widgets 5.15.12 Widget类创建 创建一个简单界面(菜单主要内容)它们是水平布局 主要内容包括一段文本和一个按钮,它们是垂直布…...
)
C++经典15道面试题目(文末含大题)
今天给大家找了几个C面试里很有可能被问的哦,赶紧收藏下来去背!!! 目录 1)C中有malloc/free,为什么还需要new/delete? 2)C中explicit关键字的作用? 3)C中static关键字的作用&a…...

自动计算30天内的股价最高价源代码
我可以回答这个问题。您可以使用以下代码来计算30天内股价的最高价: 复制 import pandas as pd import yfinance as yf # 设置股票代码和日期范围 symbol "AAPL" start_date "2021-01-01" end_date "2021-06-30" # 获取股票…...

国外SEO升级攻略!一看就懂!
SEO是搜索引擎优化的缩写,它是指通过优化网站内容和结构,提升网站在搜索引擎中的排名,从而获得更多的有价值的流量。 而关键词研究和选择是SEO优化中最基础也是最关键的环节,它决定了网站将面向哪些用户、哪些关键词和词组将被优…...
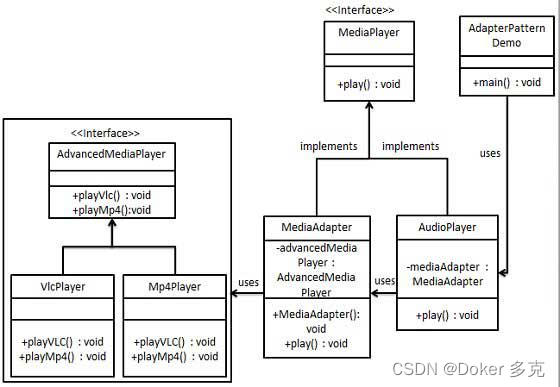
设计模式—适配器模式
适配器模式(Adapter Pattern)是作为两个不兼容的接口之间的桥梁。这种类型的设计模式属于结构型模式,它结合了两个独立接口的功能。这种模式涉及到一个单一的类,该类负责加入独立的或不兼容的接口功能。举个真实的例子,…...
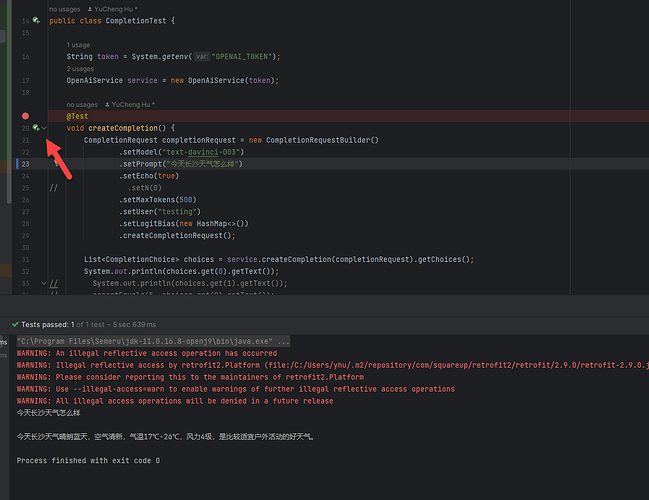
OpenAI-J 如何进行测试
当你检出 OpenAI-J 项目以后,你可以对 OpenAI-J 进行测试。在测试之前你首先需要获得 OpenAI 的 API Key。OpenAI 的 Key通常是以 sk 开头的字符串。最简单粗暴的办法就是把获得的 key 替换掉上面的字符串,然后进行测试就可以了。运行 Unit 测试在我们的…...
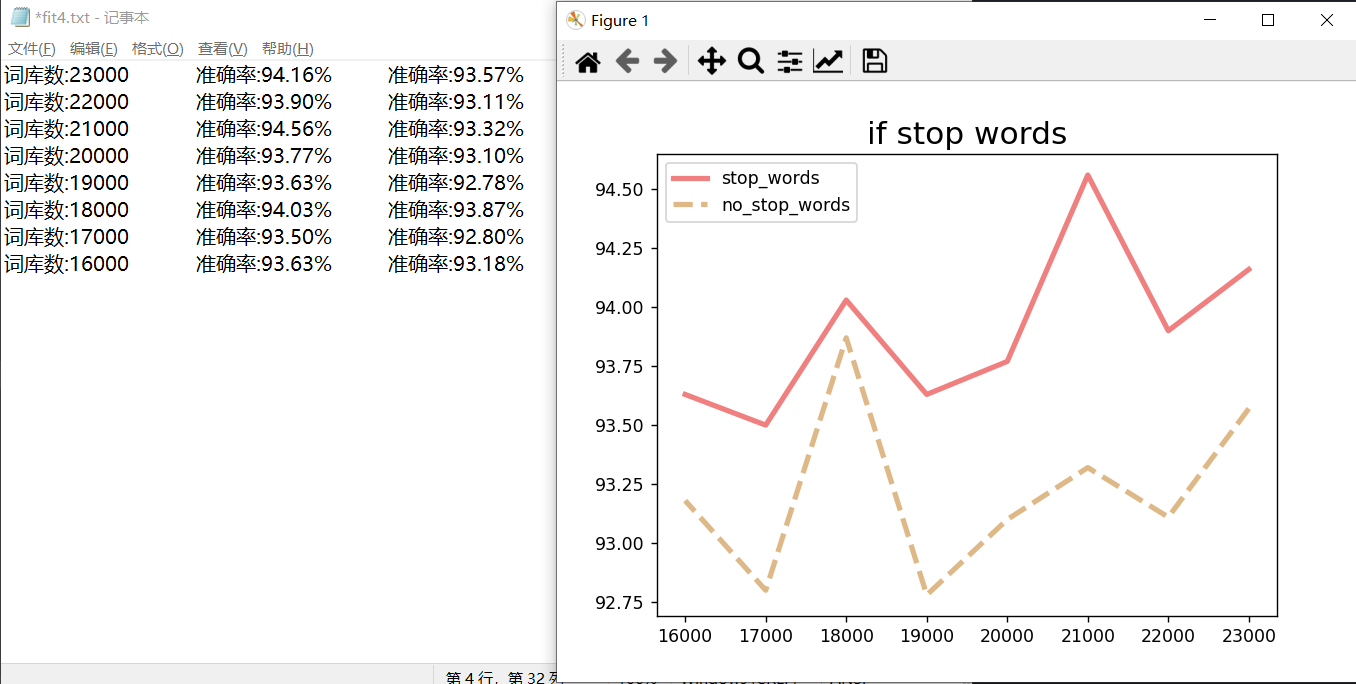
课设-机器学习课设-实现新闻分类
✅作者简介:CSDN内容合伙人、信息安全专业在校大学生🏆 🔥系列专栏 :课设-机器学习 📃新人博主 :欢迎点赞收藏关注,会回访! 💬舞台再大,你不上台,…...

关于异常控制流和系统级 I/O:进程
💭 写在前面:本文将学习《深入理解计算机系统》的第六章 - 关于异常控制流和系统级 I/O 的 进程部分。CSAPP 是计算机科学经典教材《Computer Systems: A Programmers Perspective》的缩写,该教材由Randal E. Bryant和David R. OHallaron 合著…...
)
Unet 基于TCGA颅脑肿瘤MRI分割(交叉熵损失+多通道输出)
目录 1. 介绍 2. Unet 2.1 unet 代码 2.2 测试网络 3. dataset 数据加载 4. train 训练...
)
货物摆放(蓝桥杯C/C++省赛)
题目描述 小蓝有一个超大的仓库,可以摆放很多货物。 现在,小蓝有 nn 箱货物要摆放在仓库,每箱货物都是规则的正方体。小蓝规定了长、宽、高三个互相垂直的方向,每箱货物的边都必须严格平行于长、宽、高。 小蓝希望所有的货物最…...

mysql 索引原理
文章目录 1、索引的本质2、索引的分类2.1、Hash 索引2.2、二叉树2.4、B树(二三树)2.5、B+树3、主键目录4、索引页5、索引页的分层6、非主键索引7.回表1、索引的本质 索引的本质是一种排好序的数据结构。 2、索引的分类 在数据库中,索引是分很多种类的(千万不要狭隘的认为…...

3步完成NCM转MP3:网易云音乐格式转换终极指南
3步完成NCM转MP3:网易云音乐格式转换终极指南 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾为网易云音乐下载的NCM格式文件无法在其他设备播放而烦恼?这款开源NCMDump工具为你提供完美的解决方案&a…...

离开Meta后田渊栋官宣创业,估值达46.5亿美元;17个小时谈判破裂,三星电子5万名员工或将罢工;微软纳德拉官宣MDASH框架 | 极客头条
「极客头条」—— 技术人员的新闻圈!CSDN 的读者朋友们好,「极客头条」来啦,快来看今天都有哪些值得我们技术人关注的重要新闻吧。(投稿或寻求报道:zhanghycsdn.net)整理 | 郑丽媛出品 | CSDN(I…...

如何快速掌握音频频谱分析:Spek开源工具完整指南
如何快速掌握音频频谱分析:Spek开源工具完整指南 【免费下载链接】spek Acoustic spectrum analyser 项目地址: https://gitcode.com/gh_mirrors/sp/spek 想要深入了解音频文件的内部结构吗?Spek音频频谱分析器是你的理想选择!这款免费…...

2025届必备的十大AI写作工具实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 为科研从业者、学子以及技术研发人员,在人工智能领域,合规可靠的AI论…...

UE4.27渲染管线实战:从Global Shader到Mesh Draw Pipeline,手把手教你自定义渲染Pass
UE4.27渲染管线深度实战:构建自定义渲染通道的完整方法论 引言:为什么需要深入理解UE4渲染管线? 当你在UE4项目中遇到需要实现特殊屏幕特效、非标准深度计算或定制化材质渲染时,引擎内置的渲染管线往往显得力不从心。作为图形程序…...

BDInfo终极指南:如何用免费工具深度解析蓝光光盘技术参数
BDInfo终极指南:如何用免费工具深度解析蓝光光盘技术参数 【免费下载链接】BDInfo BDInfo from http://www.cinemasquid.com/blu-ray/tools/bdinfo 项目地址: https://gitcode.com/gh_mirrors/bd/BDInfo 还在为看不懂蓝光光盘的技术规格而烦恼吗?…...

技术解析:基于UMDF的DualShock 3虚拟HID驱动架构与跨协议兼容方案
技术解析:基于UMDF的DualShock 3虚拟HID驱动架构与跨协议兼容方案 【免费下载链接】DsHidMini Virtual HID Mini-user-mode-driver for Sony DualShock 3 Controllers 项目地址: https://gitcode.com/gh_mirrors/ds/DsHidMini 技术问题背景与挑战 在Windows…...

【紧急预警】NotebookLM在广义相对论语境下的概念漂移现象:基于57篇PRL论文的偏差审计报告
更多请点击: https://intelliparadigm.com 第一章:【紧急预警】NotebookLM在广义相对论语境下的概念漂移现象:基于57篇PRL论文的偏差审计报告 现象复现与基准测试协议 我们在标准LIGO-PRL语料集(v2.3)上对NotebookLM…...

Arduino情绪交互与Flappy Bird游戏:Tone库与状态机实战
1. 项目概述:当Arduino学会“表达情绪”与“玩游戏”在嵌入式开发的世界里,让一块小小的微控制器板子“活”起来,发出声音、显示画面并与人互动,是件充满乐趣和挑战的事。我们常常追求功能的实现,但如何让交互本身变得…...

域自适应学习研究新进展
篇名问题背景方法其他域自适应学习研究进展目前关于域自适应学 习产生了大量的理论研究成果, 提出了新的学习算 法, 但是这些理论研究所涉及的领域庞杂, 如统计分 类、自然语言处理、情感分析、机器翻译、气象分析 等领域, 研究内容往往涉及域自适应学习的某一方 面, 存在着概念…...