基于大型语言模型的全双工语音对话方案
摘要解读
我们提出了一种能够以全双工方式运行的生成性对话系统,实现了无缝互动。该系统基于一个精心调整的大型语言模型(LLM),使其能够感知模块、运动功能模块以及一个具有两种状态(称为神经有限状态机,neural FSM)的简单有限状态机的概念。
感知模块和运动功能模块协同工作,使系统能够同时与用户进行说话和聆听。LLM生成文本标记以响应查询,并通过向神经FSM发出控制标记自主决定何时开始回应、等待或打断用户。LLM的所有这些任务都是在对话的实时序列化视图上进行下一个标记的预测。
在模拟现实生活互动的自动质量评估中,与基于LLM的半双工对话系统相比,所提出的系统将平均对话响应延迟减少了三倍以上,同时在超过50%的评估互动中在500毫秒内作出响应。运行仅8亿参数的LLM,我们的系统在语音对话中断精度方面比最好的商用LLM高出8%。
作者:
Peng Wang, Songshuo Lu, Yaohua Tang, Sijie Yan, Yuanjun Xiong, Wei Xia
机构:
MThreads AI
摘要分析:
本论文介绍了一种能够实现全双工操作的生成性对话系统,允许无缝互动。该系统基于大型语言模型(LLM),并与感知模块、运动功能模块以及一个简单的有限状态机(称为神经FSM)结合。感知和运动功能模块协同工作,使系统能够同时与用户进行说话和聆听。LLM生成文本标记以响应查询,并通过发出控制标记给神经FSM来自主决定何时开始回应、等待或打断用户。这些任务通过在实时对话的序列化视图上进行下一个标记的预测来完成。在模拟现实生活互动的自动质量评估中,该系统在对话响应延迟方面比基于LLM的半双工对话系统减少了三倍以上,并在超过50%的评估互动中在500毫秒内作出响应。运行8亿参数的LLM,该系统的中断精度比最佳商用LLM高出8%。

图1:左侧。支持基于大语言模型(LLM)的全双工对话模型的代理设计概述。该代理配备了一个LLM、一个感知模块和一个运动功能模块。后者连续且同时操作以收集LLM的输入并生成基于语音的LLM输出。右侧。LLM操作一个具有SPEAK(说话)和LISTEN(聆听)状态的两态神经有限状态机(FSM)。在每个时间步,LLM要么1)接收一个外部输入词元,要么2)生成一个用于语音的文本词元,要么3)生成一个控制词元以在神经FSM中信号状态转换。这个简单的工作流程无需任何外部调节模块即可实现全双工对话。
引言分析:
在人与人之间的对话中,一方在说话时,另一方在聆听,可以在必要时打断对方。现有的大多数聊天功能的LLM将对话视为一个回合制过程,每个参与者在对方回应之前生成完整的句子,这导致了半双工对话模式。虽然这种模式在构建文本聊天机器人时是合理的,但在实现类似于人类对话体验时,由于响应延迟和难以正确打断对方的问题,半双工对话模式变得不可行。本文旨在解决这一问题,实现全双工对话。
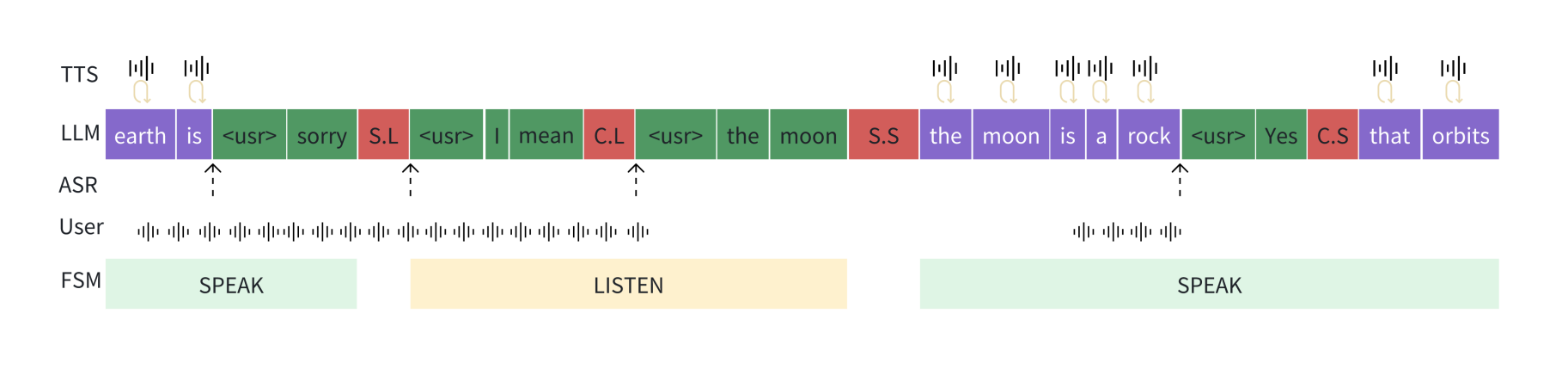
图2:在基于大语言模型(LLM)的全双工对话系统中,LLM操作一个两态有限状态机(FSM),管理对话中的状态转换。
方法分析:
论文提出的系统包括三个模块:感知模块、具有全双工能力的LLM和运动功能模块。感知模块通过自动语音识别模型捕捉用户的语音输入,并将其串流到LLM中。LLM生成的任何文本标记都会立即发送到运动功能模块,并转化为语音输出。LLM通过操作一个有两种状态(“说话”和“聆听”)的神经FSM来管理对话。
贡献与创新:
- 实现双向同时交互:系统允许用户和机器同时交谈,类似于自然人类对话,而不是回合制对话。
- 完全自主性:LLM基于语义上下文自主决定何时暂停、打断或提问。
- 快速响应:系统在对话中以最小的延迟响应用户查询。
方法的长处:
- 降低响应延迟:比现有的半双工系统减少了三倍以上的平均响应延迟。
- 高精度的中断响应:中断精度比最佳商用LLM高出8%。
方法的短处:
- 依赖多模块协同工作:当前系统仍依赖ASR和TTS模块的无缝合作,这可能引入额外的延迟。
实验与评价:
通过设计的自动评估框架,验证系统在响应延迟和对话质量方面的有效性。与最先进的半双工对话系统相比,该系统在减少对话响应延迟和提高中断响应的准确性方面表现出色。
结论:
本文提出了一种基于LLM的全双工对话系统,能够以低延迟进行响应,并根据实时用户输入自主决定何时开始和停止讲话,以及在适当的时机打断用户。未来,随着多模态LLM的出现,感知和运动功能模块将进一步简化,仅需处理音频信号的预处理和语音数据的播放。
论文下载地址
链接:https://pan.quark.cn/s/d356ceec6dd7
相关文章:
基于大型语言模型的全双工语音对话方案
摘要解读 我们提出了一种能够以全双工方式运行的生成性对话系统,实现了无缝互动。该系统基于一个精心调整的大型语言模型(LLM),使其能够感知模块、运动功能模块以及一个具有两种状态(称为神经有限状态机,n…...

Spring Boot集成Minio插件快速入门
1 Minio介绍 MinIO 是一个基于 Apache License v2.0 开源协议的对象存储服务。它兼容亚马逊 S3 云存储服务接口,非常适合于存储大容量非结构化的数据,例如图片、视频、日志文件、备份数据和容器/虚拟机镜像等,而一个对象文件可以是任意大小&…...

【C++新特性】右值引用
右值和右值的区别 C11 中右值可以分为两种:一个是将亡值( xvalue, expiring value),另一个则是纯右值( prvalue, PureRvalue): 纯右值:非引用返回的临时变量、运算表达式产生的临时变…...
信息安全基础知识(完整)
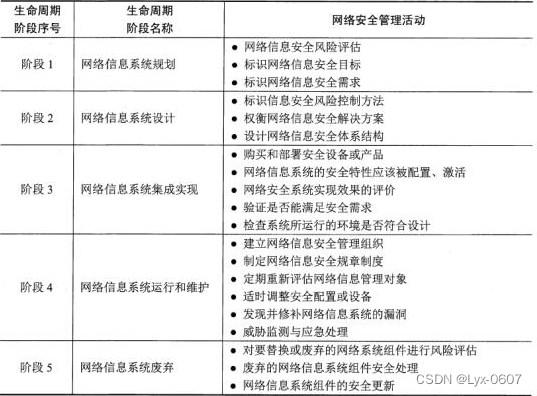
信息安全基础知识 安全策略表达模型是一种对安全需求与安全策略的抽象概念表达,一般分为自主访问控制模型(HRU)和强制访问控制模型(BLP、Biba)IDS基本原理是通过分析网络行为(访问方式、访问量、与历史访问…...
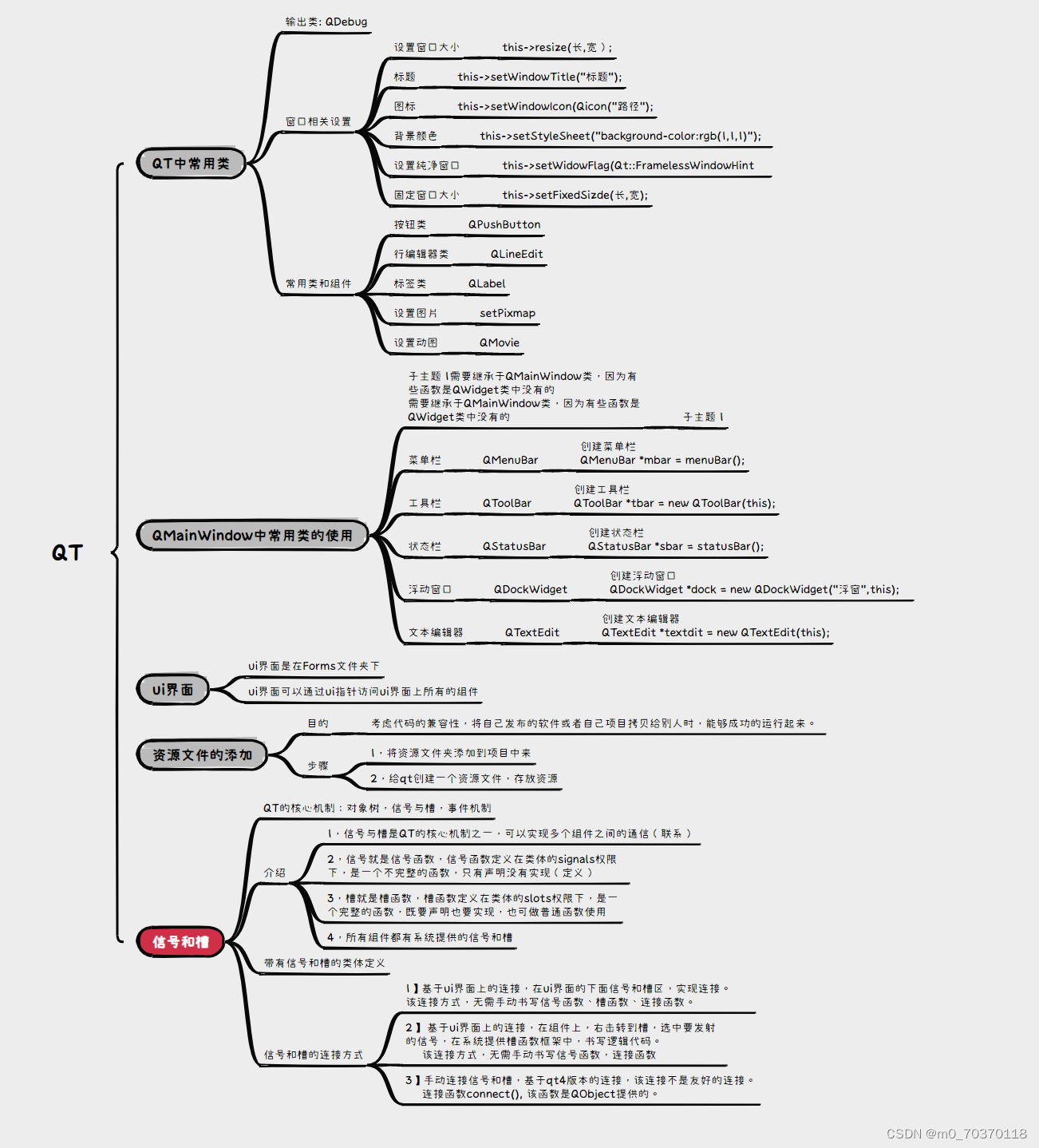
QT
#include "widget.h" #include "ui_widget.h" Widget::Widget(QWidget *parent) : QWidget(parent) , ui(new Ui::Widget) ,Gcancle(new QPushButton("取消",this)) ,EmmEdit(new QLineEdit(this)) { ui->setupUi(this);…...

双例集合(三)——双例集合的实现类之TreeMap容器类
Map接口有两个实现类,一个是HashMap容器类,另一个是TreeMap容器类。TreeMap容器类的使用在API上于HashMap容器类没有太大的区别。它们的区别主要体现在两个方面,一个是底层实现方式上,HashMap是基于Hash算法来实现的吗,…...

[SAP ABAP] 运算符
1.算数运算符 算术运算符描述加法-减法*乘法/除法MOD取余 示例1 输出结果: 输出结果: 2.比较运算符 比较运算符描述示例 等于 A B A EQ B <> 不等于 A <> B A NE B >大于 A > B A GT B <小于 A < B A LT B >大于或等于 A > B A GE B <小…...
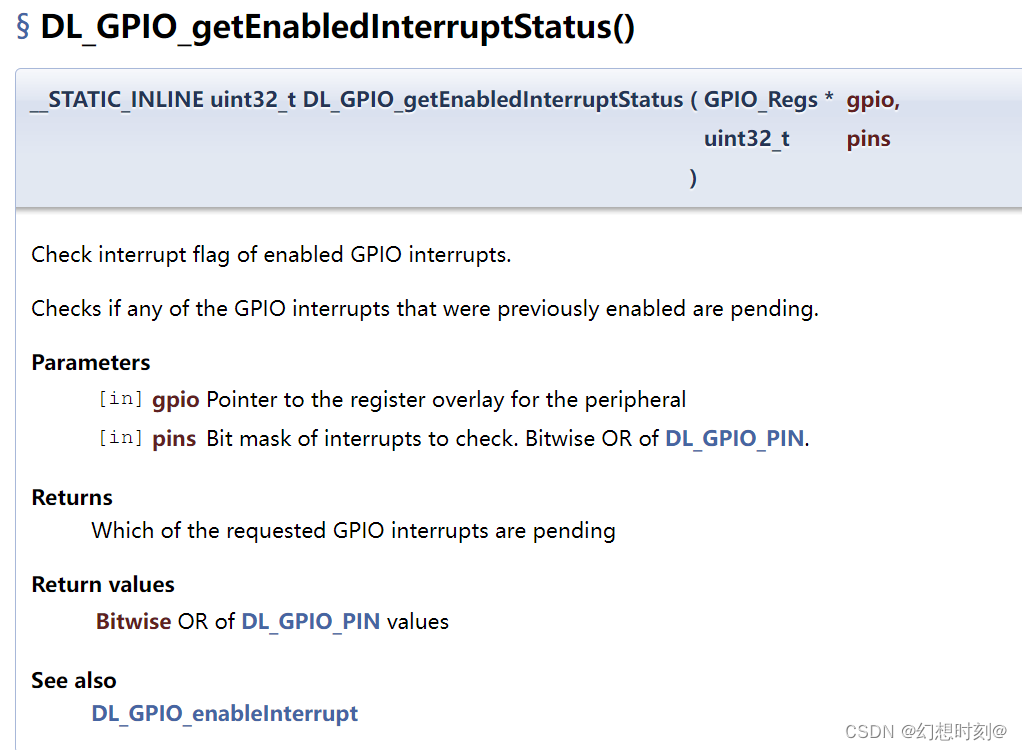
MSPM0G3507 ——GPIO例程讲解2——simultaneous_interrupts
主函数: #include "ti_msp_dl_config.h"int main(void) {SYSCFG_DL_init();/* Enable Interrupt for both GPIOA and GPIOB ports */NVIC_EnableIRQ(GPIO_SWITCHES_GPIOA_INT_IRQN); //启用SWITCHES——A的中断 NVIC_EnableIRQ(GPIO_S…...

某程序员:30岁了,老婆管钱,背着我买了50万股票,亏了20w,强制她清仓后又买了36万
“辛辛苦苦攒了几年钱,本想买房买车,结果全被老婆炒股亏掉了!” 近日,一位30岁的程序员大哥在网上吐苦水,引发了网友们的热议。 这位程序员大哥和妻子结婚后,一直秉持着“男主外,女主内”的传统…...

Docker常见面试题整理
文章目录 1. Docker 是什么?它解决了什么问题?2. Docker 和虚拟机(VM)的区别是什么?3、Docker三个核心概念4、如何构建一个 Docker 镜像?5、如何将一个 Docker 容器连接到多个网络?6、Docker Co…...
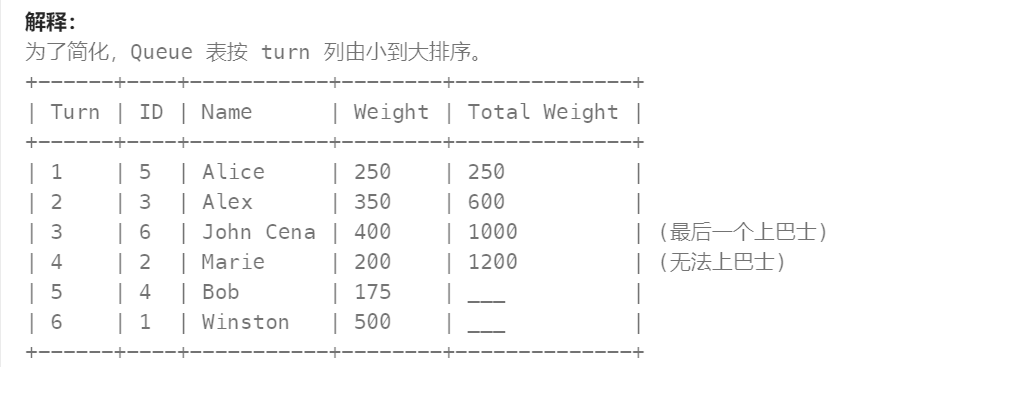
35 - 最后一个能进入巴士的人(高频 SQL 50 题基础版)
35 - 最后一个能进入巴士的人 -- sum(weight) over(order by turn) as total,根据turn升序,再求前面数的和 selectperson_name from(selectperson_name,sum(weight) over(order by turn) as totalfromQueue) new_Queue wheretotal<1000 order by total desc lim…...

WPF将dll文件嵌入到exe文件中
WPF将dll文件嵌入到exe文件中 第一步:打开.csproj文件,在Import节点后添加如下代码: <Target Name"AfterResolveReferences"><ItemGroup><EmbeddedResource Include"(ReferenceCopyLocalPaths)" Condit…...
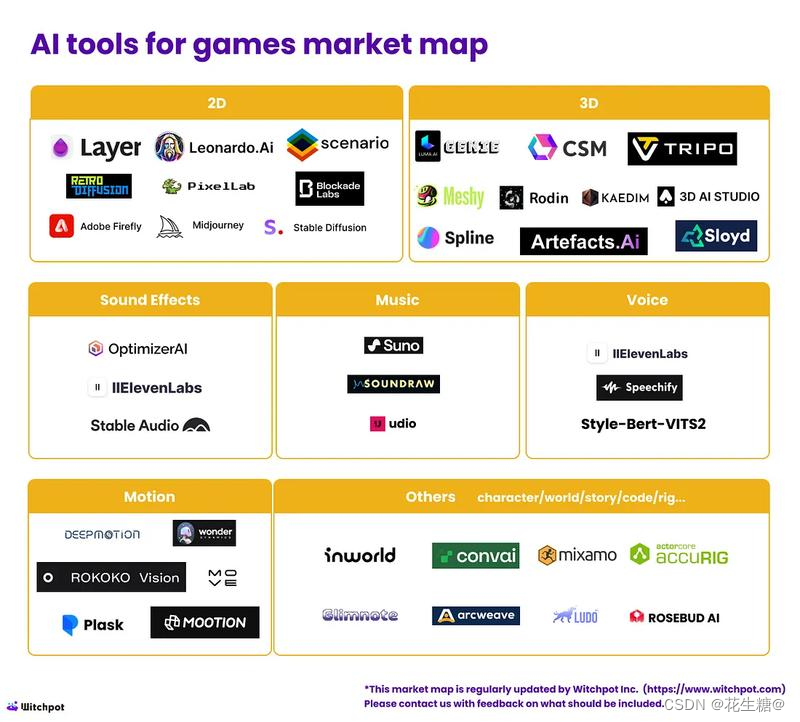
2024年AI+游戏赛道的公司和工具归类总结
随着人工智能技术的飞速发展,AI在游戏开发领域的应用越来越广泛。以下是对2024年AI+游戏赛道的公司和工具的归类总结,涵盖了从角色和场景设计到音频制作,再到动作捕捉和动画生成等多个方面。 2D与3D创作 2D创作工具:专注于角色和场景的平面设计,提供AI辅助的图案生成和风…...
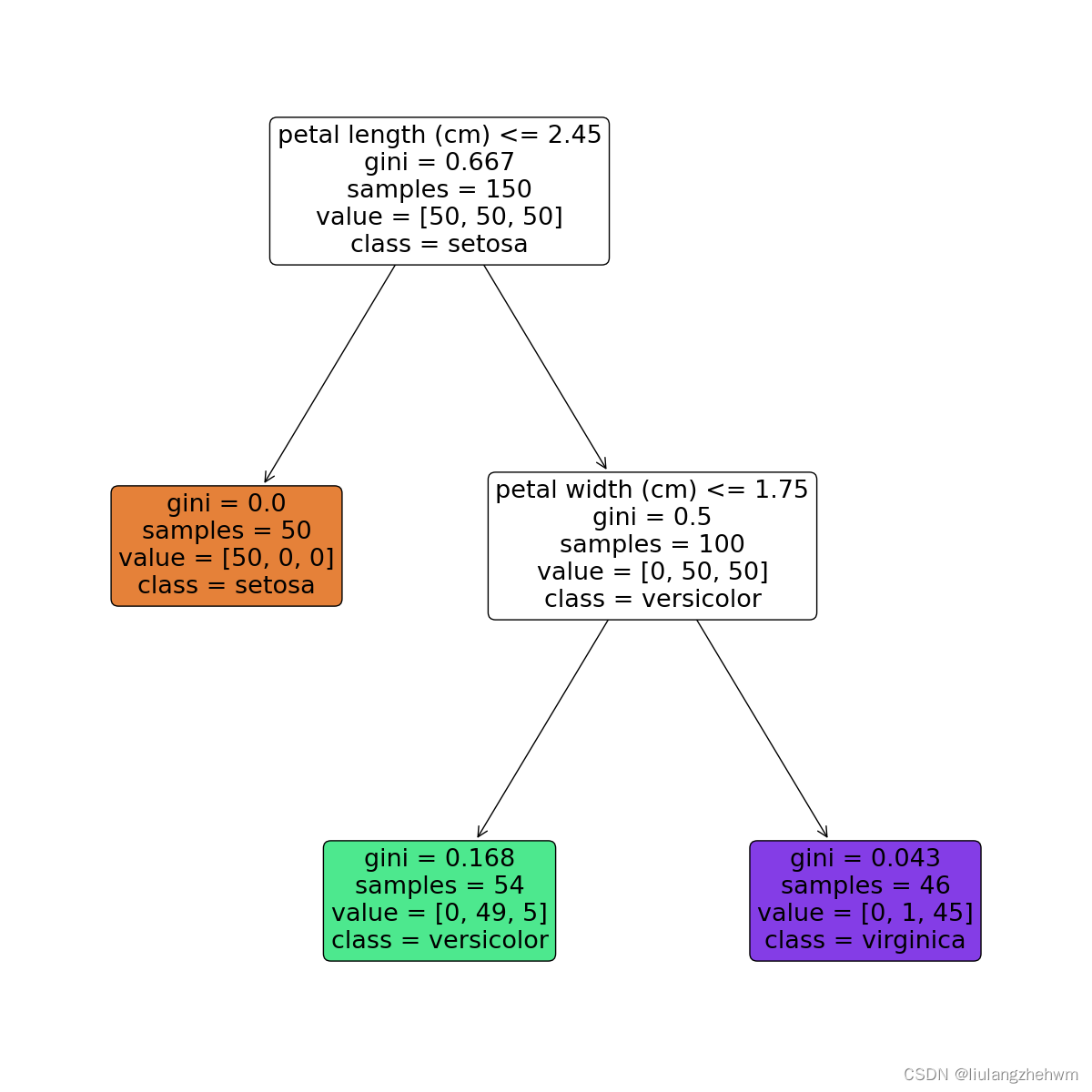
svm和决策树基本知识以及模型评价以及模型保存
svm和决策树基本知识以及模型评价以及模型保存 文章目录 一、SVM1.1,常用属性函数 二、决策树2.1,常用属性函数2.2,决策树可视化2.3,决策树解释 3,模型评价3.1,方面一(评价指标)3.2&…...

C++ 79 之 自己写异常类
#include <iostream> #include <string> using namespace std;class MyOutOfRange : public exception{ // 选中exception右键 转到定义 复制一份 virtual const char* what() const _GLIBCXX_TXN_SAFE_DYN _GLIBCXX_NOTHROW 进行函数重写 public: string m_msg;M…...

如何搭建一个成功的短剧制作平台
要搭建一个成功的短剧制作平台,需要考虑多个方面,包括目标定位、技术选择、内容管理、用户体验等。 1、明确目标和定位: 确定你的目标受众是谁,他们的年龄、兴趣、消费习惯等。 明确短剧制作平台的主要定位,是提供原创…...
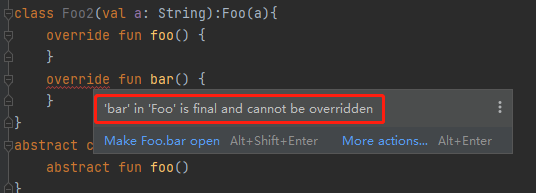
kotlin类
一、定义 1、kotlin中使用关键字class 声明类,如果一个类没有类体,也可以省略花括号, 默认为public 类型的: // 这段代码定义了一个公开的、不可被继承的Test类 class Test{} // 没有类体,可以省略花括号 class Test 底层代码&…...
android | studio的UI布局和代码调试 | UI调试 (用于找到项目源码)
网上找到一个项目,想快速的搞懂是怎么实现的,搞了半天发现原来android都升级到Jetpack Compose了,然后去找源码挺不容易的,摸索中发现了这个调试的方法,还可以。 https://developer.android.com/studio/debug/layout-i…...
——ConfigurableField)
LangChain实战技巧之六:一起玩转config(上篇)——ConfigurableField
简介 Config 包含两大类内容, ConfigurableField 可配置的字段 configurable_alternatives 可配置的替代方案 分别使用两篇文章来给大家介绍,本篇先介绍ConfigurableField 常规介绍 一些资料会这样介绍 model_spec model.configurable_fields(model…...

扫码称重上位机
目录 一 设计原型 二 后台代码 一 设计原型 模拟工具: 二 后台代码 主程序: using System.IO.Ports; using System.Net; using System.Net.Sockets; using System.Text;namespace 扫码称重上位机 {public partial class Form1 : Form{public Form1(){Initialize…...

别再为前后端AES加解密头疼了!手把手教你用CryptoJS和Java 8实现无缝对接
跨平台AES加解密实战:打通CryptoJS与Java的密钥对齐与编码陷阱 前后端分离架构下,数据安全传输始终是开发者的核心关切。当看到控制台抛出javax.crypto.BadPaddingException: Given final block not properly padded这类错误时,多数开发者都会…...

dropin-minimal-css项目架构深度解析:目录结构与核心组件
dropin-minimal-css项目架构深度解析:目录结构与核心组件 【免费下载链接】dropin-minimal-css Drop-in switcher for previewing minimal CSS frameworks 项目地址: https://gitcode.com/gh_mirrors/dr/dropin-minimal-css dropin-minimal-css是一个用于预览…...

高通QCC3084-QCC518X蓝牙耳机项目
高通QCC3084-QCC518X蓝牙耳机项目...

Windows Cleaner终极指南:3分钟解决C盘爆满,让电脑重获新生![特殊字符]
Windows Cleaner终极指南:3分钟解决C盘爆满,让电脑重获新生!🚀 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是…...

遗传算法 训练俄罗斯方块策略
代码 见仓库https://github.com/hereisaway/Tetris_AI,vibe coding出来的,可能有点小问题,但能跑。 思想 游戏策略也是一个启发式算法大展拳脚的领域。 对于很多游戏,策略可以简化为,需要一个估值函数,对当…...

别再乱用nn.Flatten了!详解start_dim与end_dim参数,避坑数据维度混淆
深度解析PyTorch中的nn.Flatten:从参数误区到实战应用 在深度学习模型的构建过程中,数据维度的处理往往成为许多开发者容易忽视却又至关重要的环节。特别是当我们需要将卷积层的输出传递给全连接层时,nn.Flatten操作几乎成为了标准配置。然而…...

[STM32U3] 【STM32U385RG 测评】+ PWM调节控制LED
在厂家提供的例程中,提供了多个PWM通道输出固定占空比的示例,但缺少改变占空比的介绍。为此,作了一下自动改变占空比和按键改变占空比的尝试。这采用的是以PWM通道1输出脉冲来控制外挂LED模块的亮度,通道1的输出引脚为PA0…...

解锁CLIP潜力:三种高效微调策略实战解析
1. CLIP模型微调的必要性 CLIP作为多模态模型的里程碑之作,其zero-shot能力确实令人惊艳。但真实业务场景中,我们常常遇到这样的困境:电商平台需要区分"奶白色"和"米白色"的家具面料,医疗影像需要识别特定病灶…...

2026届必备的AI辅助论文网站解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于学术研究的范畴之内,高效且可靠的AI辅助工具正逐渐演变成学者以及学生的得力帮…...

量子纠缠认证协议原理与工程实践
1. 量子纠缠认证协议的核心原理量子纠缠作为量子力学最反直觉的现象之一,在信息安全领域展现出独特优势。当两个量子比特形成贝尔态时,无论相隔多远,对其中一个粒子的测量会瞬间决定另一个粒子的状态。这种非局域关联特性,成为构建…...