ORBSLAM3_ROS_Ubuntu18_04环境搭建安装
orbslam3安装
ORB-SLAM3配置及安装教程(2023.3)_orbslam3安装-CSDN博客
换源,换成国内的
搜索software
安装工具
sudo apt install git
sudo apt update
sudo apt install gcc g++
cmake安装
cmake安装新版本
ubuntu20.04安装cmake详细教程-CSDN博客
https://cmake.org/download/
tar -zxvf cmake-3.23.0-rc1.tar.gzcd cmake-3.23.0-rc1./bootstrap./bootstrap报错

sudo apt-get install build-essential./bootstrapmake
sudo make install
cmake -version
which cmake
linux安装cmake_error when bootstrapping cmake: cannot find approp-CSDN博客
Eigen3安装
git clone https://github.com/eigenteam/eigen-git-mirror
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
#安装后,头文件安装在/usr/local/include/eigen3/
Pangolin安装
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocolsgit clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .
这个错误提示说明CMake在配置OpenCV时,未能找到epoxy库。epoxy是一个OpenGL库,它提供了对OpenGL的直接访问。在安装OpenCV时,如果启用了OpenGL支持,那么epoxy库是必须的。
解决方法
你需要安装libepoxy库及其开发头文件。下面是解决这个问题的步骤:
-
安装
libepoxy库打开终端并运行以下命令来安装
libepoxy库:sudo apt update sudo apt install libepoxy-dev
ros安装
ROS的最简单安装——鱼香一键安装_鱼香ros一键安装-CSDN博客
一行命令解决rosdep update失败问题(kinetic, melodic, noetic)_ros noetic版本 rosupdate-CSDN博客
opencv安装
linux下编译安装opencv生成opencv.pc-CSDN博客
pkg-config --modversion opencv
一键安装ros后,opencv也自动安装了。
下面是手动安装的教程。
cmake -D CMAKE_BUILD_TYPE=Release \-D CMAKE_INSTALL_PREFIX=/usr/local \-D OPENCV_EXTRA_MODULES_PATH=~/opencv_build/opencv_contrib/modules \-D BUILD_EXAMPLES=ON \-D BUILD_TESTS=ON \-D WITH_TBB=ON \-D WITH_EIGEN=ON \-D WITH_CUDA=ON \-D WITH_OPENGL=ON \-D WITH_QT=ON \-D WITH_V4L=ON \-D WITH_FFMPEG=ON \-D WITH_GTK=ON \-D WITH_IPP=ON \-D WITH_JPEG=ON \-D WITH_PNG=ON \-D WITH_TIFF=ON \-D WITH_WEBP=ON \-D WITH_OPENCL=ON \-D WITH_OPENMP=ON \-D WITH_GSTREAMER=ON \-D ENABLE_PRECOMPILED_HEADERS=ON \-D BUILD_SHARED_LIBS=ON \-D OPENCV_ENABLE_NONFREE=ON \-D OPENCV_GENERATE_PKGCONFIG=ON ..安装boost库
由此链接进入boost官网:https://www.boost.org/
tar -xzvf boost_1_77_0.tar.gz
cd boost_1_84_0/
sudo ./bootstrap.sh
sudo ./b2 install安装libssl-dev
sudo apt-get install libssl-dev安装orbslam3
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
这个看运气 ,运气好就能git到。翻墙增加成功率。
cd ORB_SLAM3
chmod +x build.sh
./build.sh
修改/home/cyk/ORB_SLAM3/CMakeLists.txt


重新安装Pangolin

tracking.cc报错
sed -i ‘s/++11/++14/g’ CMakeLists.txt

报错:internal compiler error
修改./build.sh
最后一行make -j4改为make


gedit ~/.bashrc/home/cyk/ORB_SLAM3/Examples_old/ROSexport ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/cyk/ORB_SLAM3/Examples_old/ROSsource ~/.bashrc
./Examples/Stereo/stereo_euroc ./Vocabulary/ORBvoc.txt ./Examples/Stereo/EuRoC.yaml /home/cyk/ORB_SLAM3/dateset/MH01 ./Examples/Stereo/EuRoC_TimeStamps/MH01.txt dataset-MH01_stereo
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/cyk/ORB_SLAM3/Examples/ROS

Examples中是没有ROS这个文件夹的,需要自己去Examples_old中手动复制过去。
chmod +x build_ros.sh
./build_ros.sh
- 纯单目:
roscore
rosrun ORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml
rosbag play MH_01_easy.bag /cam0/image_raw:=/camera/image_raw
sudo rosdep init
rosdep update

[ERROR: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list-CSDN博客](https://blog.csdn.net/ben_xiao_hai_123/article/details/122105403?ops_request_misc=%7B%22request%5Fid%22%3A%22171880645016800182195948%22%2C%22scm%22%3A%2220140713.130102334…%22%7D&request_id=171880645016800182195948&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2alltop_positive~default-1-122105403-null-null.142v100pc_search_result_base1&utm_term=ERROR%3A default sources list file already exists%3A %2Fetc%2Fros%2Frosdep%2Fsources.list.d%2F20-default.list Please delete if you wish to re-initialize&spm=1018.2226.3001.4187)

cd /home/cyk/ORB_SLAM3/Examples/ROS/ORB_SLAM3sed -i 's/++11/++14/g' CMakeLists.txt3.报错
报错1:/home/nj/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/…/…/…/include/ImuTypes.h:29:10: fatal error: sophus/se3.hpp: 没有那个文件或目录
#include <sophus/se3.hpp>
解决1:找到ORB_SLAM3/Examples_old/ROS/ORB_SLAM3下的CMakeLists.txt 修改它,include_directories中添加
${PROJECT_SOURCE_DIR}/../../../Thirdparty/Sophus 原文链接:https://blog.csdn.net/weixin_48924581/article/details/126534339
接下来的报错:
原文链接:https://blog.csdn.net/weixin_48924581/article/details/126534339




解决:
(1)找到ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR下的ros_mono_ar.cc文件:
将第151行的 cv::Mat Tcw = mpSLAM→TrackMonocular(cv_ptr→image,cv_ptr→header.stamp.toSec());
替换为:
cv::Mat Tcw;Sophus::SE3f Tcw_SE3f = mpSLAM->TrackMonocular(cv_ptr->image,cv_ptr->header.stamp.toSec());Eigen::Matrix4f Tcw_Matrix = Tcw_SE3f.matrix();cv::eigen2cv(Tcw_Matrix, Tcw);(2)找到ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR下的ViewerAR.cc文件:
将第405行的vPoints.push_back(pMP→GetWorldPos());
替换为:
cv::Mat WorldPos;
cv::eigen2cv(pMP->GetWorldPos(), WorldPos);
vPoints.push_back(WorldPos);(3)还是ViewerAR.cc文件:
将532行的cv::Mat Xw = pMP→GetWorldPos();
替换为:
cv::Mat Xw;
cv::eigen2cv(pMP->GetWorldPos(), Xw);重新编译
报错3:

解决:加头文件
在/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/AR/ViewerAR.h中加入如下:
#include <Eigen/Dense>
#include <opencv2/core/eigen.hpp>
#include <opencv2/opencv.hpp>再次重新编译,可算ok了


source devel/setup.bash
rosrun kalibr kalibr_calibrate_imu_camera --target dynamic/april_6x6.yaml --bag dynamic/dynamic.bag --cam dynamic/camchain_mono.yaml --imu dynamic/imu_adis16448.yaml --bag-from-to 5 45 --imu-models scale-misalignment --timeoffset-padding 0.1 --show-extractionkalibr安装
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
export ROS1_DISTRO=noetic # kinetic=16.04, melodic=18.04, noetic=20.04
sudo apt-get install ros-$ROS1_DISTRO-desktop-full
sudo apt-get install python-catkin-tools # ubuntu 16.04, 18.04
sudo apt-get install python3-catkin-tools python3-osrf-pycommon # ubuntu 20.04
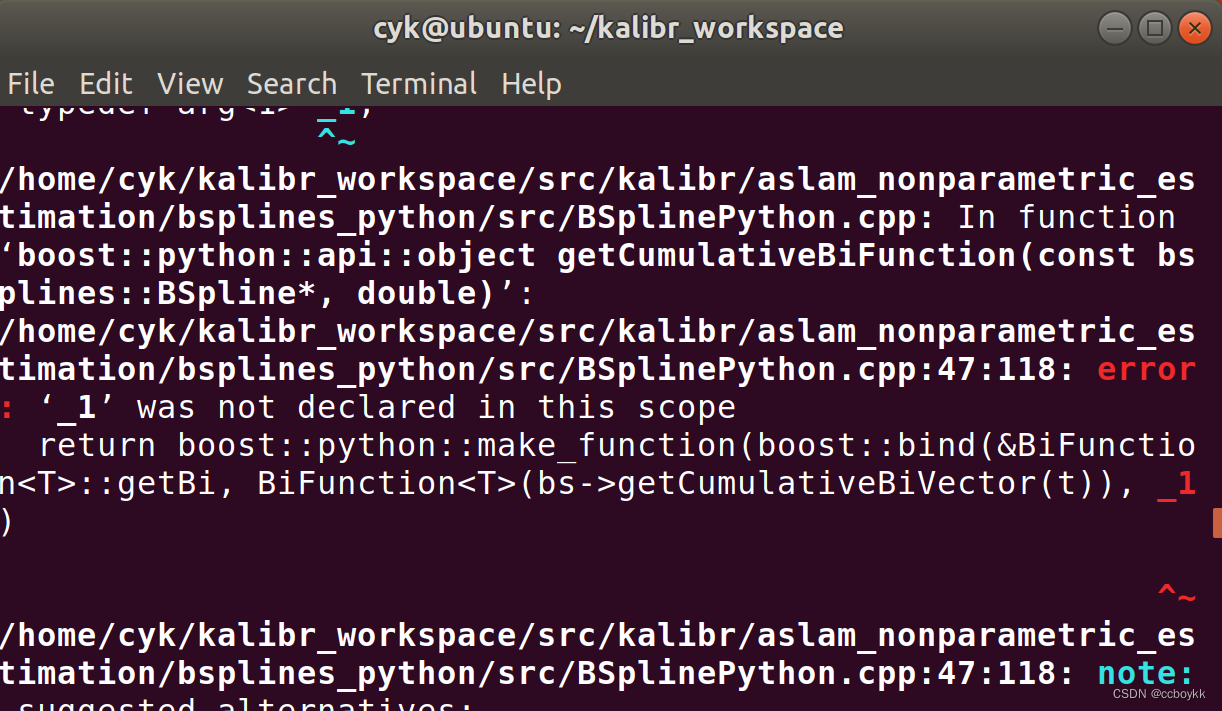
[Kalibr编译make报错:error: ‘_1’ was not declared in this scope_kali 编译安装make报错-CSDN博客](https://blog.csdn.net/weixin_43999084/article/details/130876270?ops_request_misc=%7B%22request%5Fid%22%3A%22171889118516800178576731%22%2C%22scm%22%3A%2220140713.130102334.pc%5Fall.%22%7D&request_id=171889118516800178576731&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_ecpm_v1~rank_v31_ecpm-1-130876270-null-null.142v100pc_search_result_base1&utm_term=Failed << bsplines_python%3Amake&spm=1018.2226.3001.4187)
解决方法:
/home/cyk/kalibr_workspace/src/kalibr/aslam_nonparametric_estimation/bsplines_python/src/BSplinePython.cpp
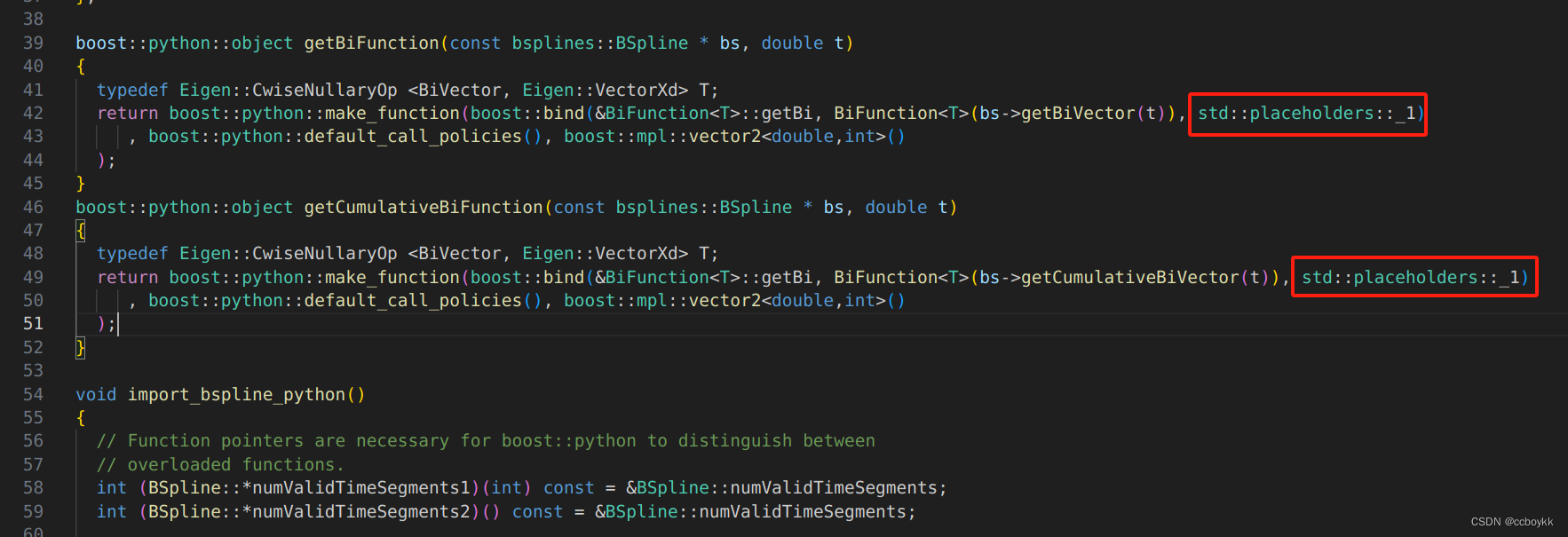
修改BSplinePython.cpp 第42还有49行
第42行
原本是
return boost::python::make_function(boost::bind(&BiFunction<T>::getBi, BiFunction<T>(bs->getBiVector(t)), _1)
修改为
return boost::python::make_function(boost::bind(&BiFunction<T>::getBi, BiFunction<T>(bs->getBiVector(t)), std::placeholders::_1)
第49行原本是
return boost::python::make_function(boost::bind(&BiFunction<T>::getBi, BiFunction<T>(bs->getCumulativeBiVector(t)), _1)
修改为
return boost::python::make_function(boost::bind(&BiFunction<T>::getBi, BiFunction<T>(bs->getCumulativeBiVector(t)), std::placeholders::_1)
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/kalibr.gitcd ~/kalibr_workspace/
catkin build -DCMAKE_BUILD_TYPE=Release -j4source ~/kalibr_workspace/devel/setup.bash
rosrun kalibr kalibr_create_target_pdf --type apriltag --nx [NUM_COLS] --ny [NUM_ROWS] --tsize [TAG_WIDTH_M] --tspace [TAG_SPACING_PERCENT]
eg: rosrun kalibr kalibr_create_target_pdf --type apriltag --nx 8 --ny 8 --tsize 0.1 --tspace 0.3
# 作者给的:
eg: rosrun kalibr kalibr_create_target_pdf --type apriltag --nx 6 --ny 6 --tsize 0.088 --tspace 0.3SLAM各传感器的标定总结:Camera/IMU/LiDAR_相机和激光雷达标注-CSDN博客
相关文章:
ORBSLAM3_ROS_Ubuntu18_04环境搭建安装
orbslam3安装 ORB-SLAM3配置及安装教程(2023.3)_orbslam3安装-CSDN博客 换源,换成国内的 搜索software 安装工具 sudo apt install git sudo apt update sudo apt install gcc g cmake安装 cmake安装新版本 ubuntu20.04安装cmake详细…...

【opencv - C++ - Ubuntu】putText 显示中文最快方法
话不多说,直接上代码 #include <iostream> #include <opencv2/opencv.hpp> #include <opencv2/freetype.hpp>using namespace std; using namespace cv;int main(void) {Mat image(1000, 1800, CV_8UC3, Scalar(200,162,33));Ptr<freetype::F…...

百度网盘下载速度慢的解决办法
目录 一、背景 二、解决办法 1、点击三个竖点,再点设置 2、点击传输,再点击去开启该功能 3、点击同意,开启优化速率 三、结果 四、备注 一、背景 当你不是百度网盘会员时,你在使用百度网盘下载时,是否下载速度太…...

Python api接口 异步
Python API接口异步编程简介 在现代的软件开发中,大多数应用都需要通过API接口与其他系统进行交互。Python是一种非常流行的编程语言,因此许多开发者选择使用Python来构建他们的API接口。在一些情况下,API接口需要进行异步编程,以…...

Java 和 Kotlin 单例模式写法对比
目录 1、饿汉模式 Java 写法: Kotlin 写法: Kotlin 这段代码反编译&简化后如下: 2、懒汉模式,静态同步方法 Java 写法: Kotlin 写法: Kotlin 这段代码反编译&简化后如下: 3、懒…...

解析connectionReset异常的原因与解决方案
解析connectionReset异常的原因与解决方案 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将深入探讨Java中connectionReset异常的原因及其解决方案。这…...

mindspore打卡第9天 transformer的encoder和decoder部分
mindspore打卡第9天 transformer的encoder和decoder部分 import mindspore from mindspore import nn from mindspore import ops from mindspore import Tensor from mindspore import dtype as mstypeclass ScaledDotProductAttention(nn.Cell):def __init__(self, dropout_…...

Python实现IPv4地址和16进制互相转换
Python实现IPv4地址和16进制互相转换 import socketdef ip_to_hex16(ipaddr):# 使用 socket 库中的方法将IP地址转换为网络字节序的二进制表示hex_bytes socket.inet_aton(ipaddr)# 将二进制数据转换为整数, 其中byteorderbig 表示使用大端字节序(从高位到低位&…...

计算机视觉 | 基于图像处理和边缘检测算法的黄豆计数实验
目录 一、实验原理二、实验步骤1. 图像读取与预处理2. 边缘检测3. 轮廓检测4. 标记轮廓序号 三、实验结果四、完整代码 Hi,大家好,我是半亩花海。 本实验旨在利用 Python 和 OpenCV 库,通过图像处理和边缘检测算法实现黄豆图像的自动识别和计…...

深入分析 Android BroadcastReceiver (七)
文章目录 深入分析 Android BroadcastReceiver (七)1. 高级应用场景1.1 示例:动态权限请求1.2 示例:应用内通知更新 2. 安全性与性能优化2.1 示例:设置权限防止广播攻击2.2 示例:使用 LocalBroadcastManager2.3 示例:在…...
C++中的数据结构
一.STL标准库 结构:STL中有六大组件,分别是:容器,算法,迭代器,仿函数,配接器,配置器;以下分别介绍这六大组件中的最主要的三个。 1.容器 容器来配置存储空间,算法通过…...

武汉星起航:一站式服务,助力亚马逊卖家高效运营,实现收益飞跃
在跨境电商的浪潮中,武汉星起航电子商务有限公司以其独特的一站式跨境电商服务,为众多亚马逊卖家提供了强有力的支持,助力他们在不断发展的市场中脱颖而出,实现收益的大幅提升。 武汉星起航的一站式跨境电商服务,以其…...

从灵感到实践:Kimi辅助完成学术论文选题的文艺之旅
学境思源,一键生成论文初稿: AcademicIdeas - 学境思源AI论文写作 昨天我们为大家介绍了ChatGPT辅助完成实现设计(AI与学术的交响:ChatGPT辅助下的实验设计新篇章)。今天我们再来看看Kimi对于论文选题都能提供哪些帮助…...

华为od-C卷200分题目4 -电脑病毒感染
华为od-C卷200分题目4 -电脑病毒感染 一个局域网内有很多台电脑,分别标注为0 - N-1的数字。相连接的电脑距离不一样,所以感染时间不一样,感染时间用t表示。其中网络内一个电脑被病毒感染,其感染网络内所有的电脑需要最少需要多长…...

show-overflow-tooltip 解决elementui el-table标签自动换行的问题
elementui中 el-table中某一行的高度不想因为宽度不够而撑开换行展示的解决方法。可通过show-overflow-tooltip属性解决,如下 代码是这样的 <el-table-column width"80" prop"id" label"ID"></el-table-column> <el…...

数字社交的领航者:解析Facebook的引领作用
在当今数字化社会中,社交网络已经成为了人们日常生活不可或缺的一部分。而在众多社交平台中,Facebook凭借其巨大的用户基础和创新的技术应用,被公认为数字社交领域的领航者之一。本文将深入解析Facebook在数字社交中的引领作用,探…...

深度分析 Apache Flink 窗口机制
什么是 Flink 窗口? Apache Flink 是一个用于处理实时流数据的开源框架,其核心功能之一是窗口(Window)机制。窗口是 Flink 在处理流数据时用于划分数据流的逻辑概念,它将无限的流数据切割成有限的、可管理的部分&…...
)
ubuntu 软链接(ubuntu20.04)
ubuntu 软链接(ubuntu20.04) 在Ubuntu和其他Linux系统中,软链接(也称为符号链接)是文件系统中的一个特殊类型的文件,它作为一个引用或指针,指向另一个文件或目录。软链接类似于Windows中的快捷…...
如何在LabVIEW中使用FPGA模块
LabVIEW FPGA模块是NI公司推出的一款强大工具,它允许用户使用LabVIEW图形化编程环境来开发FPGA(现场可编程门阵列)应用程序。与传统的HDL(硬件描述语言)编程相比,LabVIEW FPGA模块大大简化了FPGA开发的过程…...

FPGA开发技能(7)Vivado设置bit文件加密
文章目录 前言1. AES加密原理2.xilinx的AES方案3.加密流程3.1生成加密的bit流3.2将密钥写入eFUSE寄存器 4.验证结论5.传送门 前言 在FPGA的项目发布的时候需要考虑项目工程加密的问题,一方面防止自己的心血被盗,另一方面也保护公司资产,保护知…...

从‘听个响’到‘看出门道’:手把手教你用S-TOOLS 4.0分析WAV音频的隐写容量与波形变化
从‘听个响’到‘看出门道’:手把手教你用S-TOOLS 4.0分析WAV音频的隐写容量与波形变化 在数字信息时代,音频文件不仅是声音的载体,更可能成为隐藏秘密信息的"数字信封"。想象一下,你收到一段看似普通的音乐文件&#x…...

开源云原生安全态势感知平台:架构设计与实战部署指南
1. 项目概述:一个开源的云原生安全态势感知平台最近在梳理团队内部的安全监控体系时,发现了一个挺有意思的开源项目——piti/openclaw-security-dashboard。这名字直译过来是“皮提的开放之爪安全仪表盘”,听起来有点中二,但实际接…...

AI时代的“新铁饭碗”:那些机器越强、人越贵的岗位
——写给软件测试从业者的未来指南当AI能够在90秒内完成一份测试报告的初稿,当大语言模型可以自动生成覆盖边界值的测试用例,许多软件测试从业者内心都升起过一丝隐忧:我们会被取代吗?这种焦虑并非空穴来风。2025年的行业数据显示…...

AI 教学质量提升系统:以智能技术重塑课堂教学效能
教学质量是教育的核心命脉,但传统教学模式长期存在诸多痛点:课堂学情难实时把控、教师授课问题难精准发现、学生学习短板无法针对性补齐、教学复盘全靠人工经验判断,效率低、主观性强。而 AI 教学质量提升系统依托人工智能、大数据分析、语音…...

中小商家破局引流难题,AI 短剧营销系统低成本落地
一、中小商家引流普遍痛点现如今中小商家经营压力持续加大,付费推广费用高、转化不稳定,实拍广告制作成本昂贵。多数商家缺少专业运营、剪辑、策划人员,内容产出效率极低。 同时硬广营销用户抵触感强,平台审核严格,普通…...

MRIcroGL终极指南:免费医学影像三维可视化快速上手
MRIcroGL终极指南:免费医学影像三维可视化快速上手 【免费下载链接】MRIcroGL v1.2 GLSL volume rendering. Able to view NIfTI, DICOM, MGH, MHD, NRRD, AFNI format images. 项目地址: https://gitcode.com/gh_mirrors/mr/MRIcroGL MRIcroGL是一款强大的医…...

开源图书管理系统全栈架构解析:从React前端到Node.js后端实践
1. 项目概述:一个开源图书管理系统的诞生在数字内容日益丰富的今天,无论是个人知识库的整理,还是小型团队、社区的资料共享,一个轻量、灵活且完全自主可控的图书(或广义上的文档)管理系统,始终是…...

从零搭建ROS机器人视觉定位系统:AprilTag二维码实战指南
1. 为什么选择AprilTag做机器人视觉定位? 刚接触机器人视觉定位时,你可能听说过二维码、ArUco标记、AprilTag等各种方案。我最初用普通二维码做过实验,发现识别距离超过1米就经常丢帧,后来换成ArUco标记稳定性有所提升,…...

Clawdboss Upgrade:OpenClaw AI 智能体系统的非破坏性升级指南
1. 项目概述:Clawdboss Upgrade 是什么?如果你正在运行一个基于 OpenClaw 的 AI 智能体系统,并且听说过 Clawdboss 这个“增强包”能带来更强大的功能、更好的安全性和更丰富的技能生态,那么你很可能面临一个两难选择:…...

别只怪代码!当STM32遇到XCOM串口助手‘沉默’,试试从这3个硬件与软件交互的隐藏问题入手
STM32与XCOM串口通信故障的深度排查指南 1. 供电不足的幽灵:那些被忽视的硬件细节 当你面对STM32开发板与XCOM串口助手通信失败时,第一反应往往是检查代码和配置参数。但现实中,许多问题根源隐藏在硬件与软件的灰色地带。供电稳定性就是这样一…...