ROS2用c++开发参数节点通信
1.创建节点
cd chapt4/chapt4_ws/
ros2 pkg create example_parameters_rclcpp --build-type ament_cmake --dependencies rclcpp --destination-directory src --node-name parameters_basic --maintainer-name "joe" --maintainer-email "1027038527@qq.com"
2.新增parameters_basic.cpp
#include <chrono>
#include "rclcpp/rclcpp.hpp"
/*
# declare_parameter 声明和初始化一个参数
# describe_parameter(name) 通过参数名字获取参数的描述
# get_parameter 通过参数名字获取一个参数
# set_parameter 设置参数的值
*/
class ParametersBasicNode : public rclcpp::Node {
public:
// 构造函数,有一个参数为节点名称
explicit ParametersBasicNode(std::string name) : Node(name) {
RCLCPP_INFO(this->get_logger(), "节点已启动:%s.", name.c_str());
this->declare_parameter("rcl_log_level", 0); /*声明参数*/
this->get_parameter("rcl_log_level", log_level); /*获取参数*/
/*设置日志级别*/
this->get_logger().set_level((rclcpp::Logger::Level)log_level);
using namespace std::literals::chrono_literals;
timer_ = this->create_wall_timer(
500ms, std::bind(&ParametersBasicNode::timer_callback, this));
}
private:
int log_level;
rclcpp::TimerBase::SharedPtr timer_;
void timer_callback() {
this->get_parameter("rcl_log_level", log_level); /*获取参数*/
/*设置日志级别*/
this->get_logger().set_level((rclcpp::Logger::Level)log_level);
std::cout<<"======================================================"<<std::endl;
RCLCPP_DEBUG(this->get_logger(), "我是DEBUG级别的日志,我被打印出来了!");
RCLCPP_INFO(this->get_logger(), "我是INFO级别的日志,我被打印出来了!");
RCLCPP_WARN(this->get_logger(), "我是WARN级别的日志,我被打印出来了!");
RCLCPP_ERROR(this->get_logger(), "我是ERROR级别的日志,我被打印出来了!");
RCLCPP_FATAL(this->get_logger(), "我是FATAL级别的日志,我被打印出来了!");
}
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
/*创建对应节点的共享指针对象*/
auto node = std::make_shared<ParametersBasicNode>("parameters_basic");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
3.编译、运行节点
colcon build --packages-select example_parameters_rclcpp
source install/setup.bash
ros2 run example_parameters_rclcpp parameters_basic

ros2 run example_parameters_rclcpp parameters_basic --ros-args -p rcl_log_level:=10
相关文章:
ROS2用c++开发参数节点通信
1.创建节点 cd chapt4/chapt4_ws/ ros2 pkg create example_parameters_rclcpp --build-type ament_cmake --dependencies rclcpp --destination-directory src --node-name parameters_basic --maintainer-name "joe" --maintainer-email "1027038527qq.com&…...
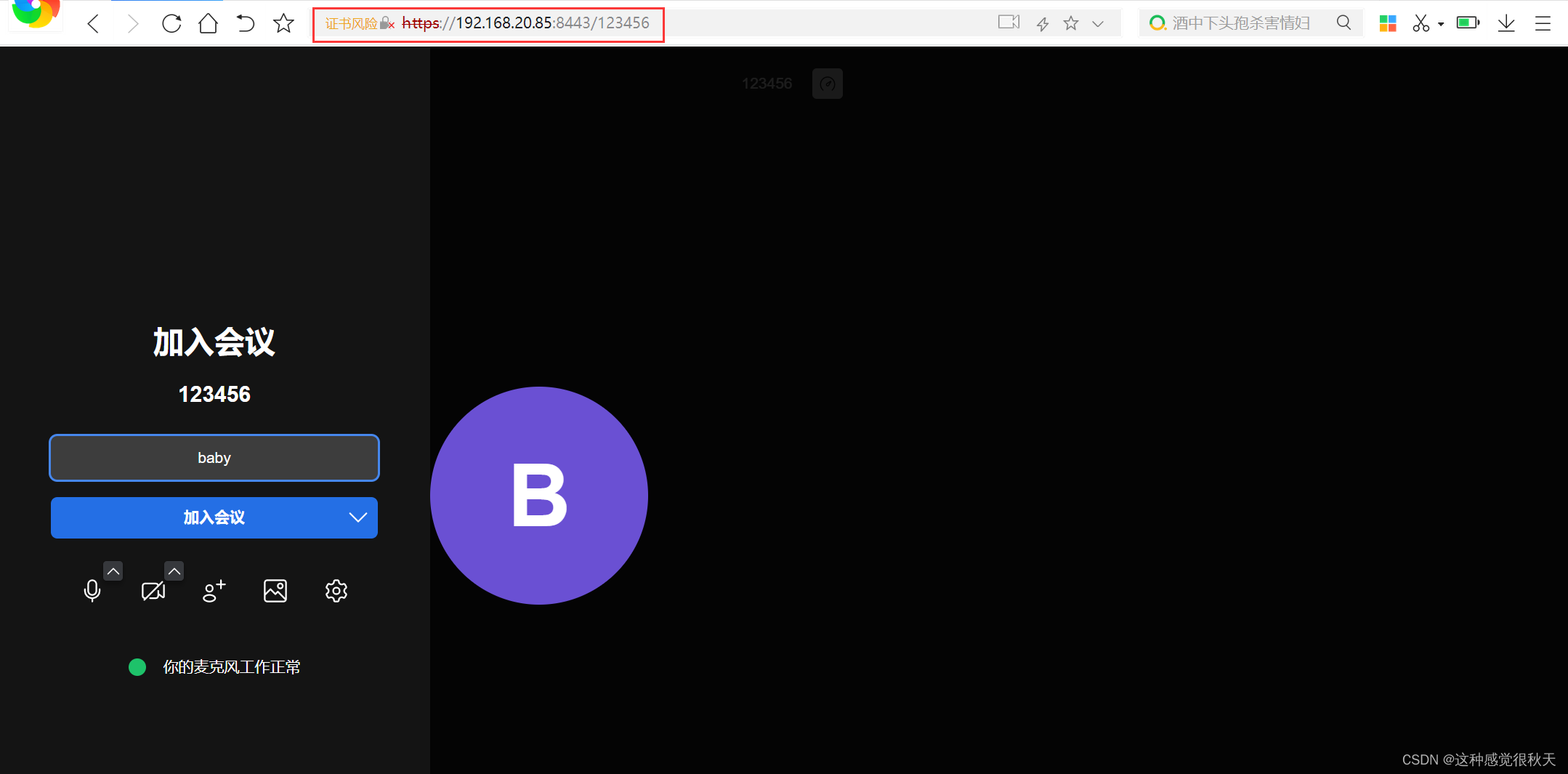
docker 部署jitsi meet
1. 部署环境: 1.1 vm 虚拟机 安装的 centos 7 1.2 centos7安装docker 和 docker-compose 2.docker命令 官网部署文档地址:(文档地址有可能失效) Self-Hosting Guide - Docker | Jitsi Meet 2.1Download and extract the late…...
【Pytest自动化测试详解】
目录 一、前言pytest是一个非常成熟的全功能的Python测试框架,主要特点: 二、pytest安装 2.1、安装 pip install -U pytest 2.2、验证安装 pytest --version # 会展示当前已安装版本 2.3、pytest文档 官方文档:https:…...
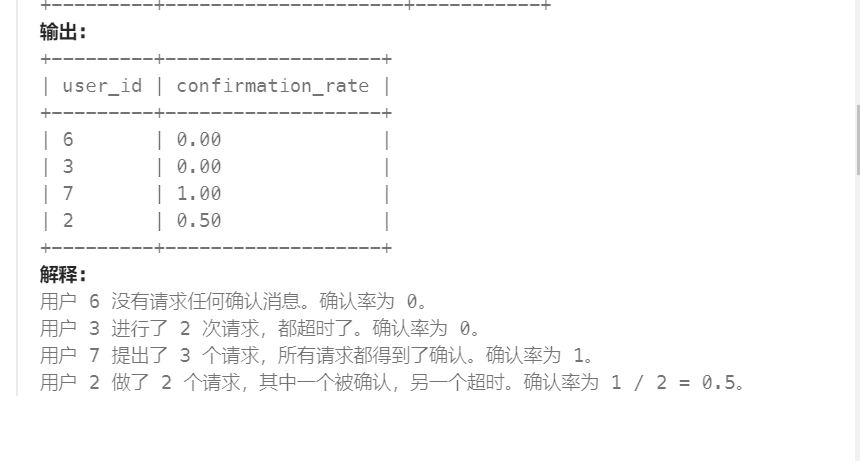
6-14题连接 - 高频 SQL 50 题基础版
目录 1. 相关知识点2. 例子2.6. 使用唯一标识码替换员工ID2.7- 产品销售分析 I2.8 - 进店却未进行过交易的顾客2.9 - 上升的温度2.10 - 每台机器的进程平均运行时间2.11- 员工奖金2.12-学生们参加各科测试的次数2.13-至少有5名直接下属的经理2.14 - 确认率 1. 相关知识点 left …...

深度挖掘数据资产,洞察业务先机:利用先进的数据分析技术,精准把握市场趋势,洞悉客户需求,为业务决策提供有力支持,实现持续增长与创新
在当今日益激烈的商业竞争环境中,企业想要实现持续增长与创新,必须深入挖掘和有效运用自身的数据资产。数据不仅是企业运营过程中的副产品,更是洞察市场趋势、理解客户需求、优化业务决策的重要资源。本文将探讨如何通过利用先进的数据分析技…...
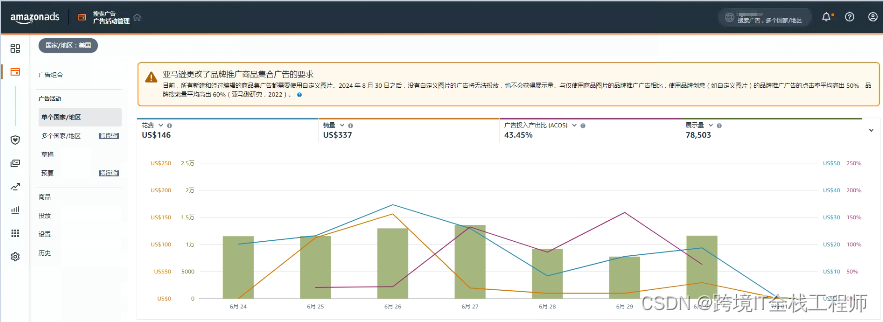
亚马逊广告如何设置关键词竞价获取最优广告投入产出比 (ACOS)
在投放亚马逊商品广告的时候,从我们通常的理解来说,关键词竞价CPC设置的越高,广告投入产出比 (ACOS)越高,所以我们通常希望CPC越低越好,但是从我们实际投放广告来看,CPC与ACOS并不是线性相关。有时候CPC设定…...
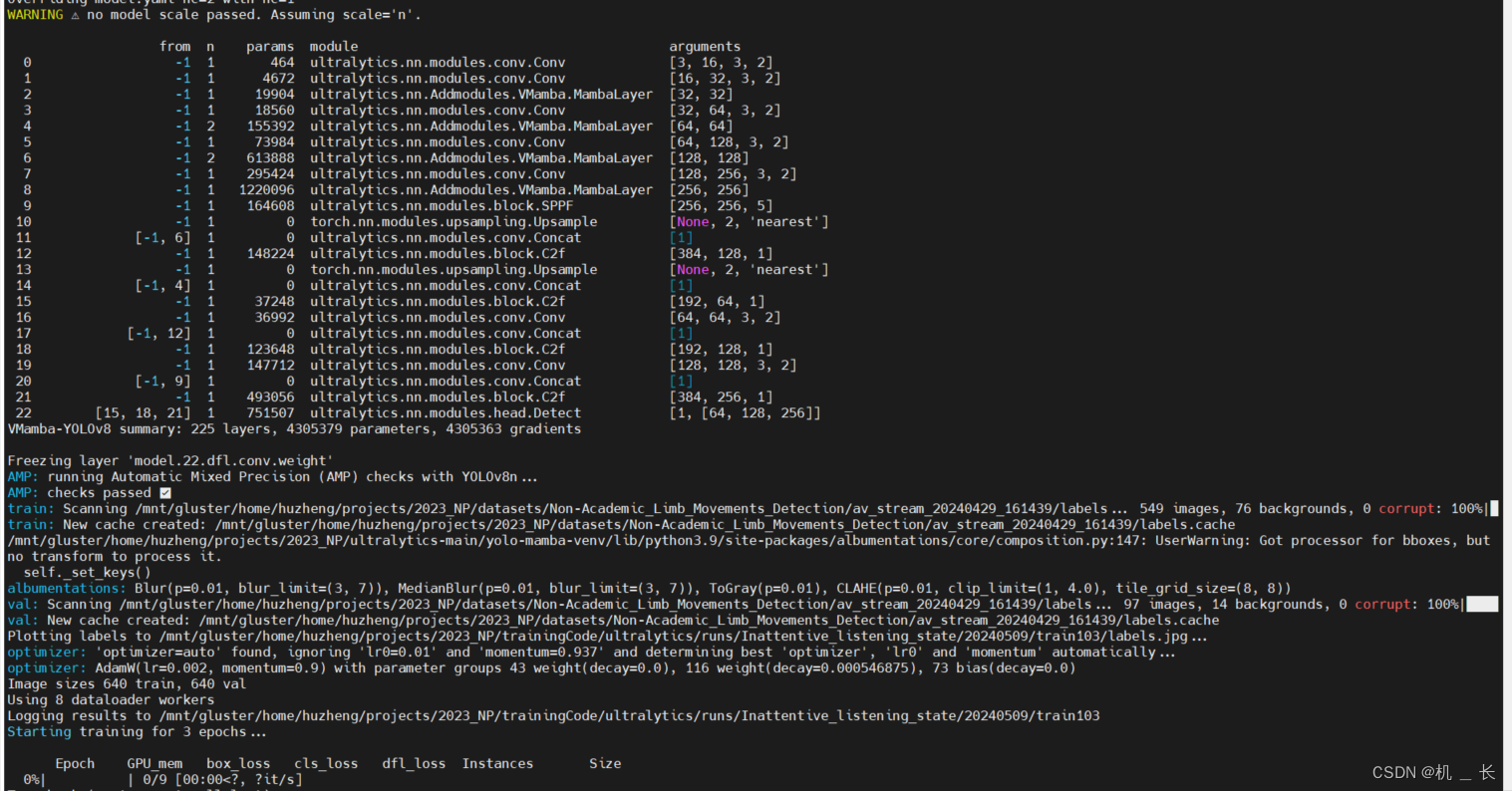
vision mamba-yolov8:结合Vmamba的yolov8目标检测改进实现
1.vision mamba结构与原理 Mamba成功的关键在于S6模型,该模型为NLP任务设计,通过选择性扫描空间状态序列模型,将二次复杂度降低至线性。但由于视觉信号(如图像)的无序性,Mamba的S6模型不能直接应用…...
2025秋招NLP算法面试真题(十一)-Transformer的并行化
正文 本文主要谈一下关于 Transformer的并行化。文章比较短,适合大家碎片化阅读。 Decoder不用多说,没有并行,只能一个一个的解码,很类似于RNN,这个时刻的输入依赖于上一个时刻的输出。 对于Encoder侧: …...

如何在本地一键配置最强国产大模型
自从OpenAI的ChatGPT横空出世以来,国内外各类大语言模型(LLM)层出不穷,其中不乏Google的Gemini、Claude、文心一言等等。相较于竞争激烈的商业模型赛道,以Llama为代表的开源大模型的进步速度也十分惊人。 伴随着大语言…...

代码随想录算法训练营第九天|151.翻转字符串里的单词、右旋字符串、28. 实现 strStr()、459.重复的子字符串
打卡Day9 1.151.翻转字符串里的单词2.右旋字符串3.28. 实现 strStr()4.459.重复的子字符串 1.151.翻转字符串里的单词 题目链接:翻转字符串里的单词 文档讲解: 代码随想录 思路:首先,移除多余的空格;然后,…...

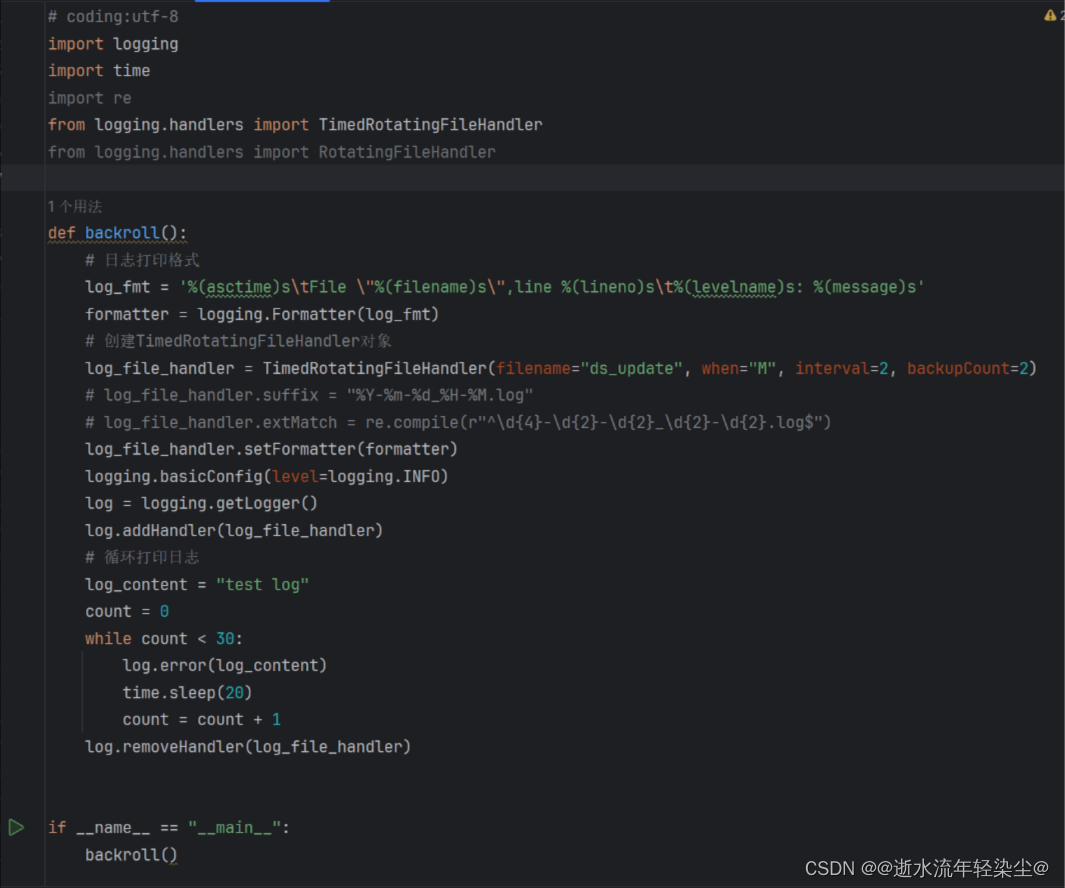
第6天:文件操作和异常处理
学习目标 掌握如何在Python中进行文件读写操作理解文件的打开模式学习如何处理文件中的数据理解异常处理的基本概念掌握使用try、except、else和finally进行异常处理 学习内容 1. 文件操作 在Python中,文件操作包括打开文件、读写文件内容和关闭文件。 文件的打…...

关于freesql 频繁报“【主库】状态不可用,等待后台检查程序恢复方可使用”异常的解决。
我的项目仓储FreeSqlRepository中同时引用了“FreeSql.Provider.MySql” 和“FreeSql.Provider.MySqlConnector” 两个组件。 当我使用freesql操作数据库增删改查时,系统总是报类似如下错误:【主库】状态不可用,等待后台检查程序恢复方可使用…...

Spring Boot中如何使用Flyway进行数据库版本控制
Spring Boot中如何使用Flyway进行数据库版本控制 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!在现代的软件开发中,数据库版本控制是保证应用程序…...
)
心理学|人格心理学——人格心理学单科作业(中科院)
一、单选题(第1-40小题,每题1.5分,共计60分。) 1、没有两个人能对同一事物做出相同的反应,反映的是人格的( ) 分值1.5分 A、稳定性 B、独特性 C、统合性 D、功能性 正确答案: B、独特性 2、人格决定一个人的生活方式,甚至有时会决定一个人的命运,反映的…...

第三方服务提供商的五大风险
亚马逊如何应对网络安全挑战 关键网络安全统计数据和趋势 移动优先世界中安全和隐私策略 当今数字时代网络安全的重要性 用户无法停止犯安全错误的 3 个原因 首席安全官可能过于依赖 EDR/XDR 防御 随着业务流程变得越来越复杂,公司开始转向第三方来提高其提供关…...

海康视频播放,包含h5和web插件
自行下载 海康开放平台 demo 都写得很清楚,不多描述 1.视频web插件 vue2写法,公共vue文件写法,调用文件即可 开始时需要以下配置,不知道的找对接平台数据的人,必须要,否则播不了 getParameterData: {po…...

数据库-python SQLite3
数据库-python SQLite3 一:sqlite3 简介二: sqlite3 流程1> demo2> sqlite3 流程 三:sqlite3 step1> create table2> insert into3> update4> select1. fetchall()2. fetchone()3. fetchmany() 5> delete6> other step 四&#…...

FFMpeg rtmp 推送本地yuv文件
可以借鉴的:C使用FFmpeg实现YUV数据编码转视频文件_C 语言_脚本之家 yuv文件下载地址:YUV Sequences 代码: #include <stdio.h> #include <unistd.h> #include <iostream> extern "C" { #include "libav…...

websocket使用,spring boot + vite + vue3
websocket使用,spring boot vite vue3 Websocket是什么WebSocket 服务端构建websocket 服务实现处理器pom文件 客户端仓库地址 Websocket是什么 WebSocket 是一种网络传输协议,可在单个 TCP 连接上进行全双工通信,位于 OSI 模型的应用层。…...

基础位运算
基础知识点: 1.判断2的幂 n&(n-1)0 2.每次减一处理 n&(n-1) 3.判断出现1次次数的数 x^0x,x^x0,a^bc则ab^c,ba^c 力扣练习题: 136.只出现一次的数字 class Solution { public:int si…...

如何用免费开源通信调试工具Wu.CommTool提升工业自动化效率
如何用免费开源通信调试工具Wu.CommTool提升工业自动化效率 【免费下载链接】Wu.CommTool 基于C#、WPF、Prism、MaterialDesign、HandyControl开发的通讯调试工具。支持Modbus Rtu调试、Mqtt调试、TCP调试、串口调试、UDP调试 项目地址: https://gitcode.com/gh_mirrors/wu/W…...

Outfit字体技术实现:9种字重的几何无衬线字体架构设计与应用实践
Outfit字体技术实现:9种字重的几何无衬线字体架构设计与应用实践 【免费下载链接】Outfit-Fonts The most on-brand typeface 项目地址: https://gitcode.com/gh_mirrors/ou/Outfit-Fonts 在现代数字产品设计中,字体选择往往决定了界面的视觉层次…...
)
告别U盘!用PXE网络批量装UOS,一台电脑搞定所有(附Arm/Mips/X86全架构配置)
告别U盘!用PXE网络批量装UOS,一台电脑搞定所有(附Arm/Mips/X86全架构配置) 在国产化替代的大背景下,UOS操作系统凭借其出色的兼容性和安全性,正被越来越多的企业和机构采用。然而,当面对数十台甚…...

FanControl深度实战指南:5分钟精通Windows风扇精准控制
FanControl深度实战指南:5分钟精通Windows风扇精准控制 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/f…...

别再只盯着PageRank了!用Python实战特征向量、Katz和PageRank三大中心性算法
用Python实战三大中心性算法:特征向量、Katz与PageRank的深度对比 当我们需要识别社交网络中最有影响力的用户,或是优化网页排序结果时,图论中的中心性算法往往能提供关键洞见。本文将带您用Python实现三种经典的中心性算法——特征向量中心性…...

StarRocks BE启动失败?别急着查网络,先看看你的CPU是不是AVX2指令集
StarRocks BE启动失败?可能是你的CPU在拖后腿 当你兴冲冲地准备部署StarRocks,却发现BE进程像幽灵一样启动即消失,日志文件也神秘失踪,这种挫败感我深有体会。大多数人的第一反应是检查网络配置或服务端口,但今天我要带…...
2026最新版免费下载(看到请立即转存 资源随时失效)pc手机通用)
植物大战僵尸 (废物版 杂交版 融合版)2026最新版免费下载(看到请立即转存 资源随时失效)pc手机通用
废物版下载链接 杂交版 融合版 《植物大战僵尸》同人模组生态解析:杂交版、融合版与废物版机制及竞品对比 《植物大战僵尸》(Plants vs. Zombies,简称PVZ)作为塔防游戏史上的经典之作,其官方作品的更新迭代虽然逐渐…...

2026最权威的六大AI辅助论文神器推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 飞速发展着的人工智能技术,在学术领域里应用变得越发广泛,特别是在毕…...

从零到一:UniApp CLI 实战入门与避坑指南
1. 为什么需要UniApp CLI? 第一次接触UniApp的开发者可能会疑惑:明明有HBuilderX这样完善的图形化工具,为什么还要学习CLI?这个问题我也曾经纠结过。经过多个项目的实战验证,我发现CLI在以下场景中优势明显:…...

Harness Open Source 与 GitLab 的区别:一个轻量一体化 DevOps 平台,一个完整 DevSecOps 平台
Harness:https://github.com/harness/harness 一、先给结论 Harness Open Source 和 GitLab 都可以做代码托管、代码协作、CI/CD 和制品管理,但二者的产品边界不同。 Harness Open Source 官方定位是一个开源的一体化开发平台,集成源码管理、CI/CD pipelines、托管开发环…...