Linux屏幕驱动开发调试笔记
引言
首先了解下什么是MIPI-DSI:
MIPI-DSI是一种应用于显示技术的串行接口,兼容DPI(显示像素接口,Display Pixel Interface)、DBI(显示总线接口,Display Bus Interface)和DCS(显示命令集,Display Command Set),以串行的方式发送像素信息或指令给外设,而且从外设中读取状态信息或像素信息,而且在传输的过程中享有自己独立的通信协议,包括数据包格式和纠错检错机制。下图所示的是MIPI-DSI接口的简单示意图。MIPI-DSI具备高速模式和低速模式两种工作模式,全部数据通道都可以用于单向的高速传输,但只有第一个数据通道才可用于低速双向传输,从属端的状态信息、像素等格式通过该数据通道返回。时钟通道专用于在高速传输数据的过程中传输同步时钟信号。此外,一个主机端可允许同时与多个从属端进行通信。

那么,在Linux中调试MIPI LCD需要注意哪些细节呢?
- 供电
- 复位
- 时序
- 像素时钟
- MIPI时钟
- MIPI命令
- MIPI数据格式
参数解读(走马观花)
在Linux驱动开发过程中,一般通用的MIPI的驱动都是现成的,比如以下的simple-panel-dsi,就是通用的MIPI接口LCD驱动,它在Linux内核中位于driver/gpu/drm/panel目录下,对应的文件是:panel-simple.c。
一般使用通用的MIPI LCD驱动,我们只需要根据自己选购的屏的参数进行配置即可,也就是只需要配置设备树即可顺利完成点屏的操作,那么如何来配置相关参数呢?这里我用的是瑞芯微的RV1109方案,在此借用荣品LCD的设备树我们来学习下它的设备树参数:
&dsi {status = "okay";rockchip,lane-rate = <480>;panel@0 {compatible ="simple-panel-dsi";reg = <0>;backlight = <&backlight>;/delete-property/ power-supply;prepare-delay-ms = <100>;reset-delay-ms = <10>;init-delay-ms = <100>;disable-delay-ms = <50>;unprepare-delay-ms = <20>;width-mm = <68>;height-mm = <121>;pinctrl-names = "default";pinctrl-0 = <&vdd_5v_3v3_h>;enable-gpios = <&gpio2 27 GPIO_ACTIVE_HIGH>;reset-gpios = <&gpio3 4 GPIO_ACTIVE_LOW>;dsi,flags = <(MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST |MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET)>;dsi,format = <MIPI_DSI_FMT_RGB888>;dsi,lanes = <4>;panel-init-sequence = [05 78 01 1105 78 01 29];display-timings {native-mode = <&timing0>;timing0: timing0 {clock-frequency = <51000000>;hactive = <1024>;vactive = <600>;hback-porch = <160>;hfront-porch = <136>;vback-porch = <16>;vfront-porch = <16>;hsync-len = <4>;vsync-len = <2>;hsync-active = <0>;vsync-active = <0>;de-active = <0>;pixelclk-active = <0>;};};ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;panel_in_dsi: endpoint {remote-endpoint = <&dsi_out_panel>;};};};};ports {#address-cells = <1>;#size-cells = <0>;port@1 {reg = <1>;dsi_out_panel: endpoint {remote-endpoint = <&panel_in_dsi>;};};};
};
上面提供了非常多的节点,但是怎么去理解这些节点呢??Linux内核为我们提供了丰富的文档:


有了这些文档,我们再来看上面设备树节点的内容就简单多了,当然我们也可以结合代码来理解这些参数的含义:

举例说明
先列举一些重要的参数:
- enable-gpios和reset-gpios

enable-gpios配置的是LCD的使能脚,reset-gpios配置的是LCD的复位脚:
enable-gpios = <&gpio2 27 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio3 4 GPIO_ACTIVE_LOW>;
如上所示,为什么是27和4,我们要查询下IO口绑定的编号,如下:
- hactive, vactive
表示显示分辨率,在设备树里一般如下表示:
hactive = <1024>; //水平分辨率
vactive = <600>; //垂直分辨率
跟分辨率相关的内容我们一般都可以从LCD厂家提供的数据手册里找到它们:

- dsi,lanes
确定接口类型为MIPI,MIPI能够实现多通道差分传输,所以通过数据手册我们可以了解它具体有多少路:

根据数据手册,我们很容易了解到数据通道有4组,所以对应设备树中的配置如下:
dsi,lanes = <4>; //表示使用 4lane 传输数据
- 时序

一般厂家FAE会给到我们一组参数,分别是:
lane个数(与原理图匹配)
HSA、HBP、HACT、HFP
VSA、VBP、VACT、VFP
FR
pixel_clk (KHZ)
phy_data_rate (Mbps)其中参考了网上的一些计算公式:
(1)HBB = HSA + HBP
(2)VBB = VSA + VBP
(3)pixel_clk = round((HBB+HACT+HFP)*(VBB+VACT+VFP)*FR/1000) KHZ
(4)phy_data_rate = round((HBB+HACT+HFP)*(VBB+VACT+VFP)*FR*output_format/lane个数/1000000) Mbps
output_format是输出数据字节数,例:RBG24即为24
根据以上提供的这些参数就可以完成MIPI DSI的时序初始化。比如我随便找一个LCD的数据手册就会看到:


4.1 以像素为单位的水平显示时序参数
在LCD屏厂手册里一般都会提供以下三个参数,分别是:
- hfront-porch:(HFP)
- hback-porch:(HBP)
- hsync-len:(HSA)
hback-porch = <160>;
hfront-porch = <136>;
hsync-len = <4>;
相对应的在以像素为单位的水平时序里还有一个水平脉冲的配置选项:hsync-active,官方文档描述是:hsync pulse is active low/high/ignored,也就是说,如果要配置的话要么就是0/1,要么就不配置,默认配置:
hsync-active = <0>;
4.2 以行为单位的垂直显示时序参数
在LCD屏厂手册里一般都会提供以下三个参数,分别是:
- vfront-porch:(VFP)
- vback-porch:(VBP)
- vsync-len:(VSA)
vback-porch = <16>;
vfront-porch = <16>;
vsync-len = <2>;
相对应的在以行为单位的垂直显示时序里还有一个水平脉冲的配置选项:vsync-active,官方文档描述是:vsync pulse is active low/high/ignored,也就是说,如果要配置的话要么就是0/1,要么就不配置,默认配置:
vsync-active = <0>;
4.3 数据使能 & 像素时钟脉冲参数
(1) de-active:data-enable pulse is active low/high/ignored
de-active = <0>;
(2) pixelclk-active:数据采样的方式
配置为1:上升沿驱动像素数据/下降沿采样数据
配置为0:下降沿驱动像素数据/上升沿采样数据
pixelclk-active = <0>;
- 像素时钟的配置
一般像素时钟有一个计算公式,如下:
(h+hbp+hfp+hsa)*(v+vbp+vfp+vsa)*60
也就是说把厂家手册提供给我们的时序参数往这个公式里面套,最终就可以算出我们的像素时钟是多少了。
- panel-init-sequence
这部分一般指的是厂家给我们提供的屏幕的初始化代码,官方文档的介绍是这样的:
A byte stream formed by simple multiple dcs packets.
byte 0: dcs data type
byte 1: wait number of specified ms after dcs command transmitted
byte 2: packet payload length
byte 3 and beyond: number byte of payload
荣品的设备树这部分配置如下:
panel-init-sequence = [05 78 01 1105 78 01 29];
深入探究
1、DSI驱动设备树DCS序列配置MIPI LCD初始化代码
在之前的内容中,我们看到荣品的屏设备树中有这么一段代码,但是里面的数据是什么含义?
panel-init-sequence = [05 78 01 1105 78 01 29];
这里详细记录了如何在设备树中适配MIPI-DSI LCD初始化代码的详细过程。Linux提供了配置初始化代码的接口,相应的设备树也就支持了,这部分在内核的文档里有写:
kernel/Documentation/devicetree/bindings/display/panel/simple-panel.txt
这个文档里简单描述了一下:
- panel-init-sequence: //初始化序列
- panel-exit-sequence: //退出序列A byte stream formed by simple multiple dcs packets. //由简单的多个dcs数据包形成的字节流byte 0: dcs data type //第0个字节:dcs数据类型byte 1: wait number of specified ms after dcs command transmitted //第1个字节:发送dcs命令后等待指定的毫秒数byte 2: packet payload length //第2个字节:数据包有效载荷长度byte 3 and beyond: number byte of payload //第3个字节及以后:有效载荷的字节数
一般情况下LCD屏会有初始化和反初始化的过程,但是在实际应用中,一般还很少会用到反初始化,所以LCD面板厂家一般都是只提供初始化代码,在MIPI DSI驱动中,我们需要将这些厂家提供的初始化代码转换为相应的DCS序列,关于初始化序列和退出序列的描述,由于我用的平台是瑞芯微,瑞芯微提供的技术文档也有相应的描述:

具体参数配置方法,查看原厂瑞芯微给的文档的案例描述:


关于 DCS 类型是怎么来理解的,瑞芯微文档中也可以看到对它的描述:

理解: 如果只有一个数据,对应的命令类型是0x05;如果有两个数据,对应的命令类型是0x15;如果多于两个数据,对应的命令类型是0x39。
2、具体的配置方法(举例)
最近由于需要调试公鸡派MIPI接口的LCD显示屏,然而我已经很久没调过驱动了;厂家给了我下面这一段初始化代码,我一看一脸懵逼,厂商的初始化代码如下:
SET_GENERIC(0x02);
W_D(0x80);W_D(0xAB);
SET_GENERIC(0x02);
W_D(0x81);W_D(0x4B);
SET_GENERIC(0x02);
W_D(0x82);W_D(0x84);
SET_GENERIC(0x02);
W_D(0x83);W_D(0x88);
SET_GENERIC(0x02);
W_D(0x84);W_D(0xA8);
SET_GENERIC(0x02);
W_D(0x85);W_D(0xE3);
SET_GENERIC(0x02);
W_D(0x86);W_D(0xB8);
SET_GENERIC(0x02);
W_D(0x87);W_D(0x5A);
SET_GENERIC(0x02);
W_D(0xB1);W_D(0x38);
SET_GENERIC(0x01);
W_D(0x11);
delay_ms(120);
SET_GENERIC(0x01);
W_D(0x29);
那么这个初始化代码是什么含义呢?厂家一般不会告诉我,也不会给我提供寄存器手册,因为那是他们的知识产权,所以我也没必要知道他们到底设置了什么东西,我只需要知道它们就是协助我点屏的重要步骤之一就可以了。
我们就简单的认为这个初始化代码包含三类指令,分别是:
- SET_GENERIC
- W_D
- delay_ms
不同厂家提供的初始化代码是不同的,但格式基本上都是大同小异,有的初始化代码很少,也有的超级长,比如荣品的设备树里就有一个更长的,如下所示,这个是已经将初始化代码转换为DCS格式的了:

可见有些LCD面板厂家提供的初始化代码也是很多的, 所以搞这个真的还是要有点耐心的,否则很容易出错,一旦出错,可能屏幕都点不亮。 以上只是举一个简单的例子,我们需要将上面厂家给我的初始化命令转化成对应的DCS格式,然后添加到设备树的初始化序列里,这样驱动在加载的时候才能够被正确识别到。
首先感谢CSDN网友提供以下思路:
https://blog.csdn.net/sunqinglin4826/article/details/104848529
https://blog.csdn.net/weixin_42399752/article/details/101108550
https://blog.csdn.net/dearsq/article/details/52354593
既然要将初始化代码转换成DCS格式,那么就衍生出下面的步骤:
-
数个数 以
SET_GENERIC为开始,下一个SET_GENERIC(不包含这次的SET_GENERIC和Delay)为结束作为一次数据发送,数一数一共有几个数据。 -
看延时 看看厂家提供的初始化代码里面有没有延时。
确定了以上步骤以后,我们就需要将初始化代码改写成下面的格式:
命令类型+延时数量+数据长度+数据
2.1、普通序列
SET_GENERIC(0x02);
W_D(0x80);W_D(0xAB);
如上,有三个数据,所以命令类型为39,所以第一个序列要这么写:
以下每一个字节一一进行对应:
命令类型 延时数量 数据长度 数据1 数据2 数据339 00 03 02 80 AB
2.2、带延时的序列
SET_GENERIC(0x01);
W_D(0x11);
delay_ms(120);
如上,有两个数据,1个延时,所以命令类型为15,所以带延时的序列要这么写:
以下每一个字节一一进行对应:
命令类型 延时数量(转16进制) 数据长度 数据1 数据215 78 02 01 11
2.3、将厂家给的序列转换为DCS格式序列
以此类推,从厂家给我们的初始化代码转换为序列就是:
39 00 03 02 80 AB
39 00 03 02 81 4B
39 00 03 02 82 84
39 00 03 02 83 88
39 00 03 02 84 A8
39 00 03 02 85 E3
39 00 03 02 86 B8
39 00 03 02 87 5A
39 00 03 02 B1 38
15 78 02 01 11
15 00 02 01 29
所以在设备树里的初始化序列就应该这么写,把上面转换的结果复制到下面来:
panel-init-sequence = [39 00 03 02 80 AB39 00 03 02 81 4B39 00 03 02 82 8439 00 03 02 83 8839 00 03 02 84 A839 00 03 02 85 E339 00 03 02 86 B839 00 03 02 87 5A39 00 03 02 B1 3815 78 02 01 1115 00 02 01 29
];
所以我们就不难理解以上荣品的DTS里初始化序列的含义:
panel-init-sequence = [05 78 01 1105 78 01 29];
第一行:
- 05表示DCS命令类型,表示只有一个数据。
- 78表示延时时间为(0x78)=> 120ms
- 01表示指令的数据长度只有一个字节
- 11表示的就是数据
同理,第二行也是一样的理解,到这里我们就彻底的掌握了设备树关于初始化序列的配置方法了,如果想详细了解驱动代码里是怎么实现的,那么也可以去追一追代码,我觉得这种实现模式太优秀了,不得不说Linux内核实现的DSI驱动设计思想真的很棒!
4、DSI驱动调试LCD时序参数配置
要点亮MIPI DSI接口的LCD,我们还有一个非常重要的配置,那就是屏幕的时序,时序就是点屏的基础,大部分LCD提供的数据手册都大同小异;
1、LCD屏幕显示原理
与纯 RGB 显示屏同理, MIPI DSI 显示参考下图:
1.1、垂直方向
直接干Datasheet,关于垂直方向,我们只需要关心以下几个参数就可以了:

垂直方向:
- tvd :垂直方向的分辨率
- tv :整个垂直方向的周期
- tvpw :vysnc 脉冲宽度
- tvb :上边黑框 ===> vbp ===> Vertical Back porch ===> 垂直后肩
- tvfp :下边黑框 ===> vfp ===> Vertical Front porch ===> 垂直前肩
1.2、水平方向
直接干Datasheet,关于水平方向,我们只需要关心以下几个参数就可以了:


水平方向:
- thd :水平方向的分辨率
- th : 整个水平方向的周期
- thpw :hsync 脉冲宽度
- thb :左边黑框 ===> hbp ===> Horizontal Back porch ===> 水平后肩
- thfp :右边黑框 ===> hfp ===> Horizontal Front porch ===> 水平前肩
2、MIPI DSI设备树时序配置
接下来我们照着以上的几个参数,结合数据手册里提供的典型参数往设备树里的时序列表里填,最终时序部分如下:
display-timings {native-mode = <&timing0>;timing0: timing0 {clock-frequency = <51200000>; //DCLKhactive = <1024>; //hactivevactive = <600>; //vactivehfront-porch = <160>; //hfphsync-len = <70>; //hsahback-porch = <160>; //hbpvfront-porch = <12>; //vfpvsync-len = <10>; //vsavback-porch = <23>; //vbphsync-active = <0>; //hync 极性控制 置 1 反转极性vsync-active = <0>; //vsync 极性控制 置 1 反转极性de-active = <0>; //DEN 极性控制pixelclk-active = <0>; //dclk 极性控制};
};
其中clock-frequency即DCLK频率,查看以下规格书:

可知,DCLK频率为51.2Mhz,所以这个参数就是51200000。
其中clock-frequency的计算公式是这样的:
clock-frequency = (h_active + hfp + hbp + h_sync) * (v_active + vfp + vbp + v_sync) * fps
根据以上公式我们还可以计算出fps:
fps = 51200000 / (1024+160+160+70) * (600+23+12+10) = 51200000 / 912030 = 56Hz
这里的56Hz也就是屏幕的刷新率(fps)。
时序搞定了,那离点屏就差10%了
相关文章:
Linux屏幕驱动开发调试笔记
引言 首先了解下什么是MIPI-DSI: MIPI-DSI是一种应用于显示技术的串行接口,兼容DPI(显示像素接口,Display Pixel Interface)、DBI(显示总线接口,Display Bus Interface)和DCS(显示命令集,Display Command Set)&#…...

Nginx Http缓存的必要性!启发式缓存有什么弊端?
👀 Nginx Http缓存的必要性!启发式缓存有什么弊端? 简介启发式缓存引发的问题nginx缓存配置 简介 我们在使用React或者Vue开发项目中会使用hash、chunkhash、contenthash来给静态资源文件进行命名。这带来的好处便是当我们部署完项目后&…...
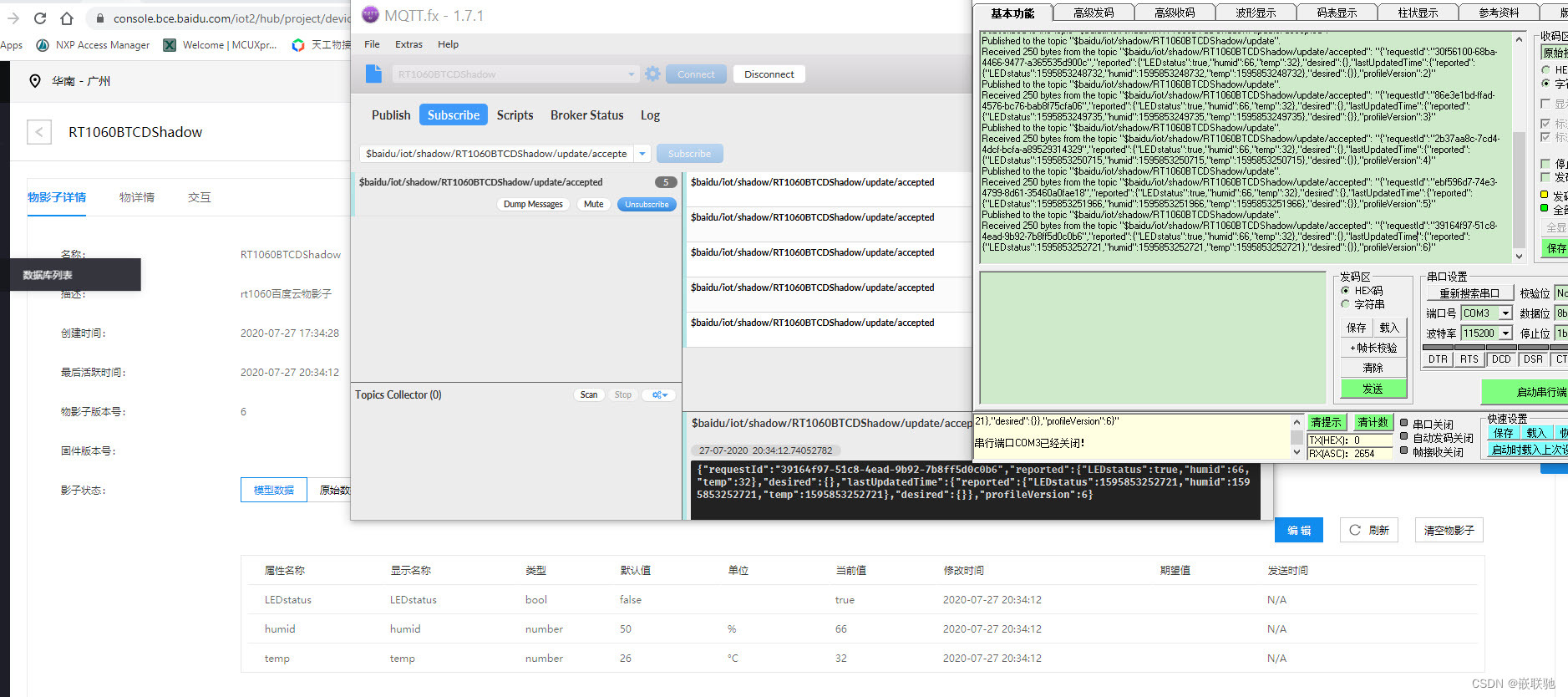
【RT摩拳擦掌】RT云端测试之百度天工物接入构建(设备型)
【RT摩拳擦掌】RT云端测试之百度天工物接入构建(设备型) 一, 文档介绍二, 物接入IOT Hub物影子构建2.1 创建设备型项目2.2 创建物模型2.3 创建物影子 三, MQTT fx客户端连接云端3.1 MQTT fx配置3.2 MQTT fx订阅3.3 MQT…...
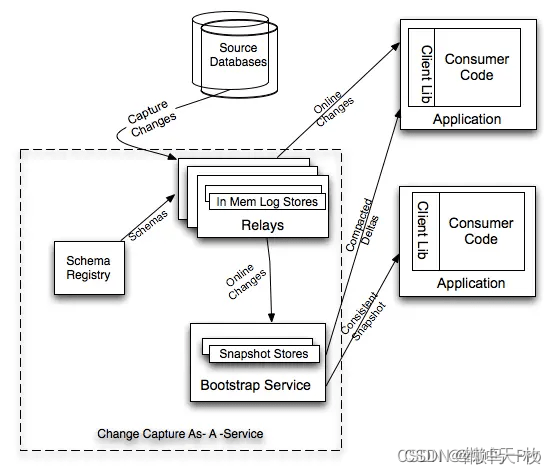
Mysql和ES使用汇总
一、mysql和ES在业务上的配合使用 一般使用时使用ES 中存储全文检索的关键字与获取的商品详情的id,通过ES查询获取查询商品的列表中展示的数据,通过展示id 操作去获取展示商品的所有信息。mysql根据id去查询数据库数据是很快的; 为什么ES一般…...

Android中使用performClick触发点击事件
Android中使用performClick触发点击事件 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将探讨在Android开发中如何使用 performClick() 方法来触发点击…...

重生之我要学后端01--后端语言选择和对应框架选择
编程语言 后端开发通常需要掌握至少一种编程语言。以下几种语言在后端开发中非常流行: Java:广泛用于企业级应用程序。Python:因其易学性和强大的库支持(如Django和Flask)而受欢迎。Node.js(JavaScript&a…...
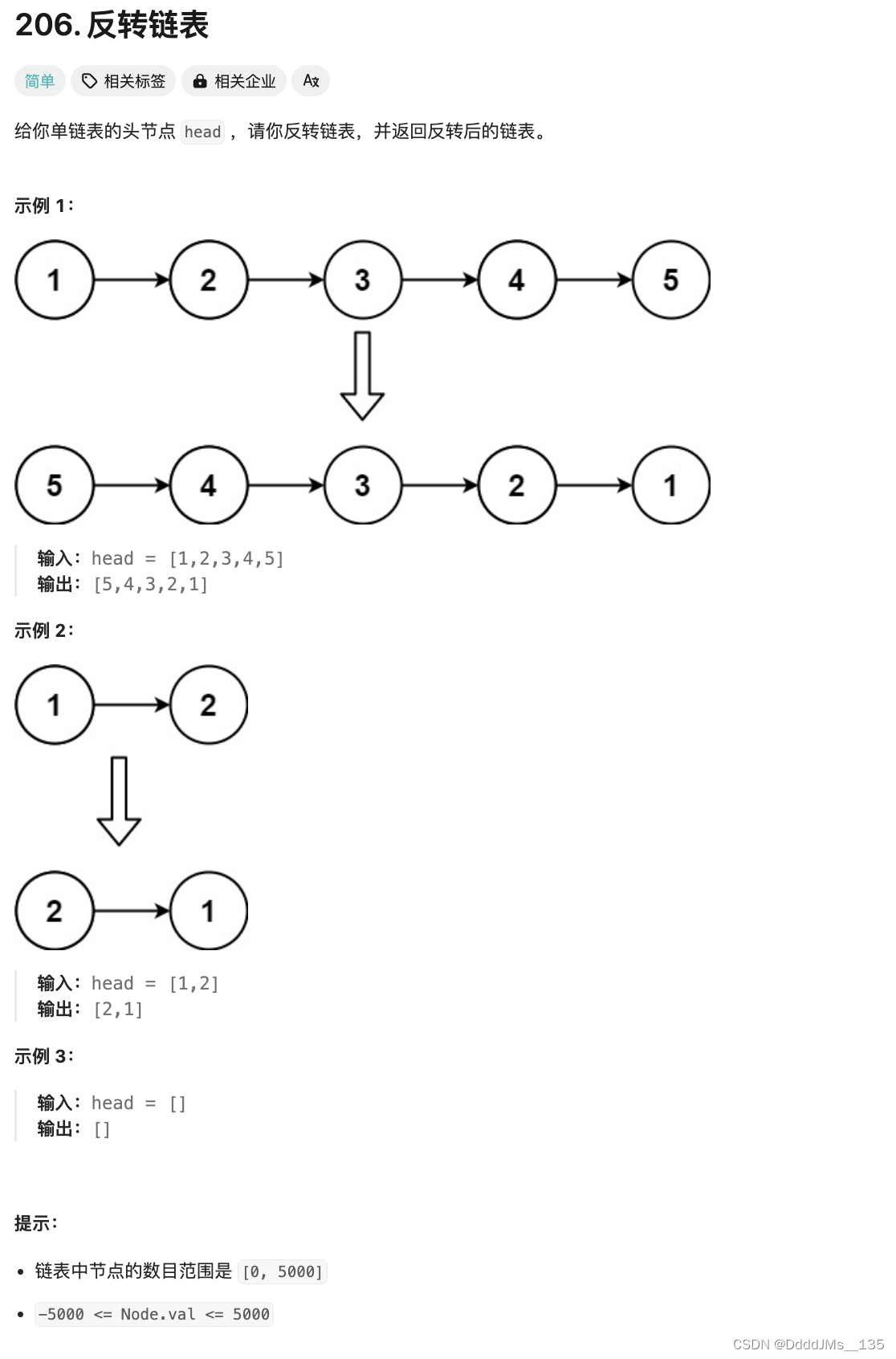
C语言 | Leetcode C语言题解之第206题反转链表
题目: 题解: struct ListNode* reverseList(struct ListNode* head) {if (head NULL || head->next NULL) {return head;}struct ListNode* newHead reverseList(head->next);head->next->next head;head->next NULL;return newHea…...

Flink Window DEMO 学习
该文档演示了fink windows的操作DEMO 环境准备: kafka本地运行:kafka部署自动生成名字代码:随机名自动生成随机IP代码:随机IPFlink 1.18 测试数据 自动向kafka推送数据 import cn.hutool.core.date.DateUtil; import com.alibab…...

library source does not match the bytecode for class SpringApplication
library source does not match the bytecode for class SpringApplication 问题描述:springboot源码点进去然后download source后提示标题内容。spring版本5.2.8.RELEASE,springboot版本2.7.18 解决方法:把spring版本改为与boot版本对应的6.…...
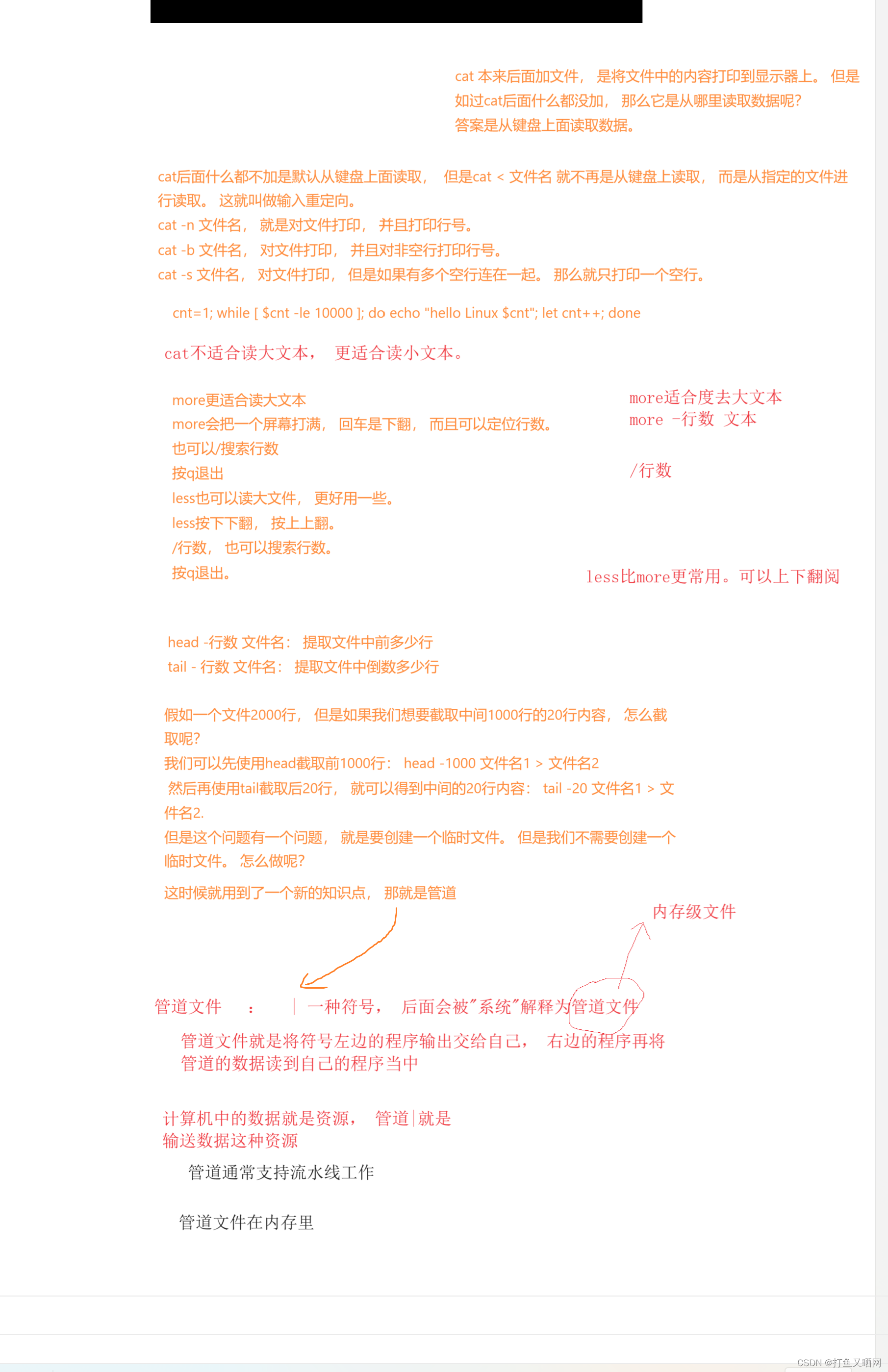
Linux基础指令介绍与详解——原理学习
前言:本节内容标题虽然为指令,但是并不只是讲指令, 更多的是和指令相关的一些原理性的东西。 如果友友只想要查一查某个指令的用法, 很抱歉, 本节不是那种带有字典性质的文章。但是如果友友是想要来学习的,…...

【代码随想录算法训练Day52】LeetCode 647. 回文子串、LeetCode 516.最长回文子串
Day51 动态规划第十三天 LeetCode 647. 回文子串 dp数组的含义:i到j的子串是否是回文的,是的话dp[i][j]1 递推公式:if(s[i]s[j]) i j 一个元素 是回文的 |i-j|1 两个元素 是回文的 j-i>1 判断dp[i1][j-1] 初始化:全部初始化成…...

VUE项目安全漏洞扫描和修复
npm audit 1、npm audit是npm 6 新增的一个命令,可以允许开发人员分析复杂的代码并查明特定的漏洞。 2、npm audit名称执行,需要包package.json和package-lock.json文件。它是通过分析 package-lock.json 文件,继而扫描我们的包分析是否包含漏洞的。 …...
Nginx主配置文件---Nginx.conf
nginx主配置文件的模块介绍 全局块: 全局块是配置文件从开始到 events 块之间的部分,其中指令的作用域是 Nginx 服务器全局。主要指令包括: user:指定可以运行 Nginx 服务的用户和用户组,只能在全局块配置。例如&…...

IOS Swift 从入门到精通:写入 Firestore数据库
文章目录 FirestoreManager 类创建文档更新文档更新 Firestore 权限规则现在,我们想要在 Firestore 中添加或更新文档。如果您还没有,我建议您阅读有关设置 Firebase Auth 和从 Firestore 读取的部分。您必须在应用程序中启用 Firebase,并在项目中启用 Firestore 数据库,才…...

维克日记 v0.4.2:开发者友好的数字化笔记工具
维克日记,专为技术开发者和笔记爱好者设计的数字化笔记工具,以其强大的功能和灵活的配置赢得了用户的好评。软件采用Markdown语法,提供实时预览功能,让您的笔记编辑更加高效和直观。维克日记的用户界面简洁而功能齐全,…...

语音房平台交友,语聊APP系统开发线上语音交友平台成熟案例源码出售
随着移动互联网的快速发展,人们对于社交方式的需求也在不断变化,语音房平台交友语助APP作为一种新兴的社交方式,以其独特的语音交流模式和实时互动的特点,受到了越来越多用户的喜爱本文将详细介绍语音房平台交友语聊APP系统的开发…...

VMamba: Visual State Space Model论文笔记
文章目录 VMamba: Visual State Space Model摘要引言相关工作Preliminaries方法网络结构2D-Selective-Scan for Vision Data(SS2D) VMamba: Visual State Space Model 论文地址: https://arxiv.org/abs/2401.10166 代码地址: https://github.com/MzeroMiko/VMamba 摘要 卷积神…...
探索哈希函数:数据完整性的守护者
引言 银行在处理数以百万计的交易时,如何确保每一笔交易都没有出错?快递公司如何跟踪成千上万的包裹,确保每个包裹在运输过程中没有丢失或被替换?医院和诊所为庞大的患者提供有效的医疗保健服务,如何确保每个患者的医疗…...

解析Kotlin中的Unit【笔记摘要】
1. Kotlin的Unit 和 Java的void 的区别 // Java public void sayHello() {System.out.println("Hello!") }// Kotlin fun sayHello(): Unit {println("Hello!") }Unit 和 Java 的 void 真正的区别在于,void 是真的表示什么都不返回,…...
仿论坛项目--初识Spring Boot
1. 技术准备 技术架构 • Spring Boot • Spring、Spring MVC、MyBatis • Redis、Kafka、Elasticsearch • Spring Security、Spring Actuator 开发环境 • 构建工具:Apache Maven • 集成开发工具:IntelliJ IDEA • 数据库:MySQL、Redi…...

为Claude Code配置Taotoken密钥以解决访问限制与token不足问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken密钥以解决访问限制与token不足问题 对于经常使用Claude Code作为编程助手的开发者而言,直接…...
可穿戴智能服饰制作:NeoPixel灯带与Circuit Playground的集成实践
1. 项目概述:当可穿戴电子遇上创意服饰如果你和我一样,既着迷于微控制器上跑起的第一行代码,又无法抗拒布料、针线和那些闪闪发光的小玩意儿,那么这个项目就是为你准备的。将NeoPixel灯带和Circuit Playground微控制器“缝”进一件…...

终极M3U8视频下载神器:3步搞定加密流媒体!
终极M3U8视频下载神器:3步搞定加密流媒体! 【免费下载链接】m3u8-downloader 一个M3U8 视频下载(M3U8 downloader)工具。跨平台: 提供windows、linux、mac三大平台可执行文件,方便直接使用。 项目地址: https://gitcode.com/gh_mirrors/m3u8d/m3u8-do…...

内容创作平台集成多个AI模型提升内容多样性的实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 内容创作平台集成多个AI模型提升内容多样性的实践 对于内容创作平台而言,用户的偏好千差万别,内容的类型也…...

MSP430铁电超值系列MCU:25美分实现25种外设的嵌入式设计实战
1. 项目概述:为什么是MSP430铁电超值系列?在嵌入式开发的广阔世界里,选型往往是项目成败的第一步。面对琳琅满目的微控制器(MCU),工程师们常常在性能、成本、功耗和开发便利性之间反复权衡。今天我想和大家…...

Cursor Free VIP:终极免费解锁AI编程助手Pro功能的完整指南
Cursor Free VIP:终极免费解锁AI编程助手Pro功能的完整指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...

企业AI Agent安全防护体系
企业AI Agent安全防护体系:构建智能时代的安全长城 前言:智能革命与安全挑战 当我们站在21世纪第三个十年的门槛上回望,人工智能(AI)的发展速度可谓惊人。从早期的专家系统到今天的大语言模型(LLM),AI已经从实验室走向了企业生产的核心。而在这一波浪潮中,AI Agent(…...

如何彻底解决Windows系统DLL缺失问题:Visual C++运行库一键修复终极指南
如何彻底解决Windows系统DLL缺失问题:Visual C运行库一键修复终极指南 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件时突…...

LibreOffice Online 终极指南:如何在浏览器中实现免费办公协作
LibreOffice Online 终极指南:如何在浏览器中实现免费办公协作 【免费下载链接】online Read-only Mirror - no pull request (use https://gerrit.libreoffice.org instead) 项目地址: https://gitcode.com/gh_mirrors/onl/online 还在为昂贵的在线办公软件…...

5个技巧打造个性化Obsidian笔记界面:AnuPpuccin主题美化指南
5个技巧打造个性化Obsidian笔记界面:AnuPpuccin主题美化指南 【免费下载链接】AnuPpuccin Personal theme for Obsidian 项目地址: https://gitcode.com/gh_mirrors/an/AnuPpuccin 还在为单调的笔记界面而烦恼吗?想要让你的Obsidian笔记软件焕然一…...