代码随想录算法训练营第74天:路径总结[1]
代码随想录算法训练营第74天:路径总结
A * 算法精讲 (A star算法)
卡码网:126. 骑士的攻击(opens new window)
题目描述
在象棋中,马和象的移动规则分别是“马走日”和“象走田”。现给定骑士的起始坐标和目标坐标,要求根据骑士的移动规则,计算从起点到达目标点所需的最短步数。
棋盘大小 1000 x 1000(棋盘的 x 和 y 坐标均在 [1, 1000] 区间内,包含边界)
输入描述
第一行包含一个整数 n,表示测试用例的数量。
接下来的 n 行,每行包含四个整数 a1, a2, b1, b2,分别表示骑士的起始位置 (a1, a2) 和目标位置 (b1, b2)。
输出描述
输出共 n 行,每行输出一个整数,表示骑士从起点到目标点的最短路径长度。
输入示例
6
5 2 5 4
1 1 2 2
1 1 8 8
1 1 8 7
2 1 3 3
4 6 4 6
输出示例
2
4
6
5
1
0
#思路
我们看到这道题目的第一个想法就是广搜,这也是最经典的广搜类型题目。
这里我直接给出广搜的C++代码:
#include<iostream>
#include<queue>
#include<string.h>
using namespace std;
int moves[1001][1001];
int dir[8][2]={-2,-1,-2,1,-1,2,1,2,2,1,2,-1,1,-2,-1,-2};
void bfs(int a1,int a2, int b1, int b2)
{queue<int> q;q.push(a1);q.push(a2);while(!q.empty()){int m=q.front(); q.pop();int n=q.front(); q.pop();if(m == b1 && n == b2)break;for(int i=0;i<8;i++){int mm=m + dir[i][0];int nn=n + dir[i][1];if(mm < 1 || mm > 1000 || nn < 1 || nn > 1000)continue;if(!moves[mm][nn]){moves[mm][nn]=moves[m][n]+1;q.push(mm);q.push(nn);}}}
}int main()
{
int n, a1, a2, b1, b2;
cin >> n;
while (n--) {
cin >> a1 >> a2 >> b1 >> b2;
memset(moves,0,sizeof(moves));bfs(a1, a2, b1, b2);cout << moves[b1][b2] << endl;}return 0;
}提交后,大家会发现,超时了。
因为本题地图足够大,且 n 也有可能很大,导致有非常多的查询。
我们来看一下广搜的搜索过程,如图,红色是起点,绿色是终点,黄色是要遍历的点,最后从 起点 找到 达到终点的最短路径是棕色。
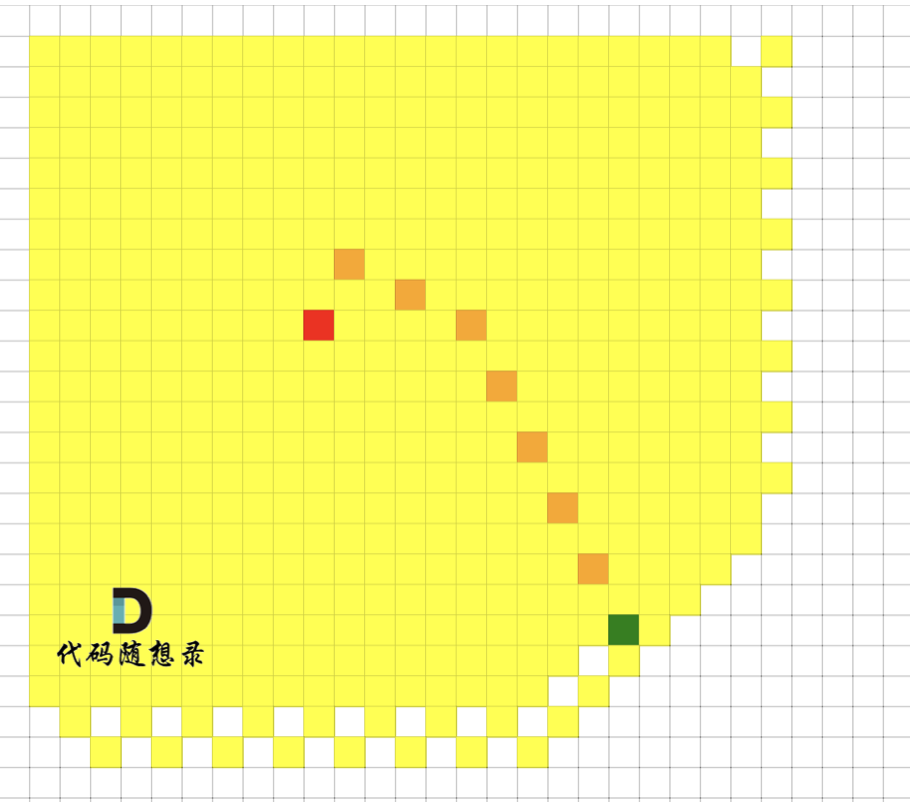
可以看出 广搜中,做了很多无用的遍历, 黄色的格子是广搜遍历到的点。
这里我们能不能让便利方向,向这终点的方向去遍历呢?
这样我们就可以避免很多无用遍历。
#Astar
Astar 是一种 广搜的改良版。 有的是 Astar是 dijkstra 的改良版。
其实只是场景不同而已 我们在搜索最短路的时候, 如果是无权图(边的权值都是1) 那就用广搜,代码简洁,时间效率和 dijkstra 差不多 (具体要取决于图的稠密)
如果是有权图(边有不同的权值),优先考虑 dijkstra。
而 Astar 关键在于 启发式函数, 也就是 影响 广搜或者 dijkstra 从 容器(队列)里取元素的优先顺序。
以下,我用BFS版本的A * 来进行讲解。
在BFS中,我们想搜索,从起点到终点的最短路径,要一层一层去遍历。

如果 使用A * 的话,其搜索过程是这样的,如图,图中着色的都是我们要遍历的点。
(上面两图中 最短路长度都是8,只是走的方式不同而已)
大家可以发现 **BFS 是没有目的性的 一圈一圈去搜索, 而 A *** 是有方向性的去搜索。
看出 A * 可以节省很多没有必要的遍历步骤。
为了让大家可以明显看到区别,我将 BFS 和 A * 制作成可视化动图,大家可以自己看看动图,效果更好。
地址:https://kamacoder.com/tools/knight.html
那么 A * 为什么可以有方向性的去搜索,它的如何知道方向呢?
其关键在于 启发式函数。
那么启发式函数落实到代码处,如果指引搜索的方向?
在本篇开篇中给出了BFS代码,指引 搜索的方向的关键代码在这里:
int m=q.front();q.pop();
int n=q.front();q.pop();
从队列里取出什么元素,接下来就是从哪里开始搜索。
所以 启发式函数 要影响的就是队列里元素的排序!
这是影响BFS搜索方向的关键。
对队列里节点进行排序,就需要给每一个节点权值,如何计算权值呢?
每个节点的权值为F,给出公式为:F = G + H
G:起点达到目前遍历节点的距离
F:目前遍历的节点到达终点的距离
起点达到目前遍历节点的距离 + 目前遍历的节点到达终点的距离 就是起点到达终点的距离。
本题的图是无权网格状,在计算两点距离通常有如下三种计算方式:
- 曼哈顿距离,计算方式: d = abs(x1-x2)+abs(y1-y2)
- 欧氏距离(欧拉距离) ,计算方式:d = sqrt( (x1-x2)^2 + (y1-y2)^2 )
- 切比雪夫距离,计算方式:d = max(abs(x1 - x2), abs(y1 - y2))
x1, x2 为起点坐标,y1, y2 为终点坐标 ,abs 为求绝对值,sqrt 为求开根号,
选择哪一种距离计算方式 也会导致 A * 算法的结果不同。
本题,采用欧拉距离才能最大程度体现 点与点之间的距离。
所以 使用欧拉距离计算 和 广搜搜出来的最短路的节点数是一样的。 (路径可能不同,但路径上的节点数是相同的)
我在制作动画演示的过程中,分别给出了曼哈顿、欧拉以及契比雪夫 三种计算方式下,A * 算法的寻路过程,大家可以自己看看看其区别。
动画地址:https://kamacoder.com/tools/knight.html
计算出来 F 之后,按照 F 的 大小,来选去出队列的节点。
可以使用 优先级队列 帮我们排好序,每次出队列,就是F最小的节点。
实现代码如下:(启发式函数 采用 欧拉距离计算方式)
#include<iostream>
#include<queue>
#include<string.h>
using namespace std;
int moves[1001][1001];
int dir[8][2]={-2,-1,-2,1,-1,2,1,2,2,1,2,-1,1,-2,-1,-2};
int b1, b2;
// F = G + H
// G = 从起点到该节点路径消耗
// H = 该节点到终点的预估消耗struct Knight{
int x,y;
int g,h,f;
bool operator < (const Knight & k) const{ // 重载运算符, 从小到大排序
return k.f < f;
}
};priority_queue<Knight> que;int Heuristic(const Knight& k) { // 欧拉距离
return (k.x - b1) * (k.x - b1) + (k.y - b2) * (k.y - b2); // 统一不开根号,这样可以提高精度
}
void astar(const Knight& k)
{
Knight cur, next;que.push(k);while(!que.empty()){cur=que.top(); que.pop();if(cur.x == b1 && cur.y == b2)break;for(int i = 0; i < 8; i++){next.x = cur.x + dir[i][0];next.y = cur.y + dir[i][1];if(next.x < 1 || next.x > 1000 || next.y < 1 || next.y > 1000)continue;if(!moves[next.x][next.y]){moves[next.x][next.y] = moves[cur.x][cur.y] + 1;// 开始计算Fnext.g = cur.g + 5; // 统一不开根号,这样可以提高精度,马走日,1 * 1 + 2 * 2 = 5
next.h = Heuristic(next);
next.f = next.g + next.h;
que.push(next);}}}
}int main()
{
int n, a1, a2;
cin >> n;
while (n--) {
cin >> a1 >> a2 >> b1 >> b2;
memset(moves,0,sizeof(moves));
Knight start;
start.x = a1;
start.y = a2;
start.g = 0;
start.h = Heuristic(start);
start.f = start.g + start.h;astar(start);
while(!que.empty()) que.pop(); // 队列清空cout << moves[b1][b2] << endl;}return 0;
}#复杂度分析
A * 算法的时间复杂度 其实是不好去量化的,因为他取决于 启发式函数怎么写。
最坏情况下,A * 退化成广搜,算法的时间复杂度 是 O(n * 2),n 为节点数量。
最佳情况,是从起点直接到终点,时间复杂度为 O(dlogd),d 为起点到终点的深度。
因为在搜索的过程中也需要堆排序,所以是 O(dlogd)。
实际上 A * 的时间复杂度是介于 最优 和最坏 情况之间, 可以 非常粗略的认为 A * 算法的时间复杂度是 O(nlogn) ,n 为节点数量。
A * 算法的空间复杂度 O(b ^ d) ,d 为起点到终点的深度,b 是 图中节点间的连接数量,本题因为是无权网格图,所以 节点间连接数量为 4。
#拓展
如果本题大家使用 曼哈顿距离 或者 切比雪夫距离 计算的话,可以提交试一试,有的最短路结果是并不是最短的。
原因也是 曼哈顿 和 切比雪夫这两种计算方式在 本题的网格地图中,都没有体现出点到点的真正距离!
可能有些录友找到类似的题目,例如 poj 2243 **(opens new window)** ,使用 曼哈顿距离 提交也过了, 那是因为题目中的地图太小了,仅仅是一张 8 * 8的地图,根本看不出来 不同启发式函数写法的区别。
A * 算法 并不是一个明确的最短路算法,**A *** 算法搜的路径如何,完全取决于 启发式函数怎么写。
**A *** 算法并不能保证一定是最短路,因为在设计 启发式函数的时候,要考虑 时间效率与准确度之间的一个权衡。
虽然本题中,A * 算法得到是最短路,也是因为本题 启发式函数 和 地图结构都是最简单的。
例如在游戏中,在地图很大、不同路径权值不同、有障碍 且多个游戏单位在地图中寻路的情况,如果要计算准确最短路,耗时很大,会给玩家一种卡顿的感觉。
而真实玩家在玩游戏的时候,并不要求一定是最短路,次短路也是可以的 (玩家不一定能感受出来,及时感受出来也不是很在意),只要奔着目标走过去 大体就可以接受。
所以 在游戏开发设计中,**保证运行效率的情况下,A *** 算法中的启发式函数 设计往往不是最短路,而是接近最短路的 次短路设计。
大家如果玩 LOL,或者 王者荣耀 可以回忆一下:如果 从很远的地方点击 让英雄直接跑过去 是 跑的路径是不靠谱的,所以玩家们才会在 距离英雄尽可能近的位置去点击 让英雄跑过去。
#A * 的缺点
大家看上述 A * 代码的时候,可以看到 我们想 队列里添加了很多节点,但真正从队列里取出来的 仅仅是 靠启发式函数判断 距离终点最近的节点。
相对了 普通BFS,A * 算法只从 队列里取出 距离终点最近的节点。
那么问题来了,A * 在一次路径搜索中,大量不需要访问的节点都在队列里,会造成空间的过度消耗。
IDA * 算法 对这一空间增长问题进行了优化,关于 IDA * 算法,本篇不再做讲解,感兴趣的录友可以自行找资料学习。
另外还有一种场景 是 A * 解决不了的。
如果题目中,给出 多个可能的目标,然后在这多个目标中 选择最近的目标,这种 A * 就不擅长了, A * 只擅长给出明确的目标 然后找到最短路径。
如果是多个目标找最近目标(特别是潜在目标数量很多的时候),可以考虑 Dijkstra ,BFS 或者 Floyd。
最短路算法总结篇
至此已经讲解了四大最短路算法,分别是Dijkstra、Bellman_ford、SPFA 和 Floyd。
针对这四大最短路算法,我用了七篇长文才彻底讲清楚,分别是:
- dijkstra朴素版
- dijkstra堆优化版
- Bellman_ford
- Bellman_ford 队列优化算法(又名SPFA)
- bellman_ford 算法判断负权回路
- bellman_ford之单源有限最短路
- Floyd 算法精讲
- 启发式搜索:A * 算法
最短路算法比较复杂,而且各自有各自的应用场景,我来用一张表把讲过的最短路算法的使用场景都展现出来:

(因为A * 属于启发式搜索,和上面最短路算法并不是一类,不适合一起对比,所以没有放在一起)
可能有同学感觉:这个表太复杂了,我记也记不住。
其实记不住的原因还是对 这几个最短路算法没有深刻的理解。
这里我给大家一个大体使用场景的分析:
如果遇到单源且边为正数,直接Dijkstra。
至于 使用朴素版还是 堆优化版 还是取决于图的稠密度, 多少节点多少边算是稠密图,多少算是稀疏图,这个没有量化,如果想量化只能写出两个版本然后做实验去测试,不同的判题机得出的结果还不太一样。
一般情况下,可以直接用堆优化版本。
如果遇到单源边可为负数,直接 Bellman-Ford,同样 SPFA 还是 Bellman-Ford 取决于图的稠密度。
一般情况下,直接用 SPFA。
如果有负权回路,优先 Bellman-Ford, 如果是有限节点最短路 也优先 Bellman-Ford,理由是写代码比较方便。
如果是遇到多源点求最短路,直接 Floyd。
除非 源点特别少,且边都是正数,那可以 多次 Dijkstra 求出最短路径,但这种情况很少,一般出现多个源点了,就是想让你用 Floyd 了。
对于A * ,由于其高效性,所以在实际工程应用中使用最为广泛 ,由于其 结果的不唯一性,也就是可能是次短路的特性,一般不适合作为算法题。
游戏开发、地图导航、数据包路由等都广泛使用 A * 算法。
图论总结篇
从深搜广搜 到并查集,从最小生成树到拓扑排序, 最后是最短路算法系列。
至此算上本篇,一共30篇文章,图论之旅就在此收官了。
在0098.所有可达路径 ,我们接触了两种图的存储方式,邻接表和邻接矩阵,掌握两种图的存储方式很重要。
图的存储方式也是大家习惯在核心代码模式下刷题 经常忽略的 知识点。因为在力扣上刷题不需要掌握图的存储方式。
#深搜与广搜
在二叉树章节中,其实我们讲过了 深搜和广搜在二叉树上的搜索过程。
在图论章节中,深搜与广搜就是在图这个数据结构上的搜索过程。
深搜与广搜是图论里基本的搜索方法,大家需要掌握三点:
- 搜索方式:深搜是可一个方向搜,不到黄河不回头。 广搜是围绕这起点一圈一圈的去搜。
- 代码模板:需要熟练掌握深搜和广搜的基本写法。
- 应用场景:图论题目基本上可以即用深搜也可用广搜,无疑是用哪个方便而已
#注意事项
需要注意的是,同样是深搜模板题,会有两种写法。
在0099.岛屿的数量深搜.md 和 0105.有向图的完全可达性,涉及到dfs的两种写法。
我们对dfs函数的定义是 是处理当前节点 还是处理下一个节点 很重要,决定了两种dfs的写法。
这也是为什么很多录友看到不同的dfs写法,结果发现提交都能过的原因。
而深搜还有细节,有的深搜题目需要用到回溯的过程,有的就不用回溯的过程,
一般是需要计算路径的问题 需要回溯,如果只是染色问题(岛屿问题系列) 就不需要回溯。
例如: 0105.有向图的完全可达性 深搜就不需要回溯,而 0098.所有可达路径 中的递归就需要回溯,文章中都有详细讲解
注意:以上说的是不需要回溯,不是没有回溯,只要有递归就会有回溯,只是我们是否需要用到回溯这个过程,这是需要考虑的。
很多录友写出来的广搜可能超时了, 例如题目:0099.岛屿的数量广搜
根本原因是只要 加入队列就代表 走过,就需要标记,而不是从队列拿出来的时候再去标记走过。
具体原因,我在0099.岛屿的数量广搜 中详细讲了。
在深搜与广搜的讲解中,为了防止惯性思维,我特别加入了题目 0106.岛屿的周长,提醒大家,看到类似的题目,也不要上来就想着深搜和广搜。
还有一些图的问题,在题目描述中,是没有图的,需要我们自己构建一个图,例如 0110.字符串接龙,题目中连线都没有,需要我们自己去思考 什么样的两个字符串可以连成线。
#并查集
并查集相对来说是比较复杂的数据结构,其实他的代码不长,但想彻底学透并查集,需要从多个维度入手,
我在理论基础篇的时候 讲解如下重点:
- 为什么要用并查集,怎么不用个二维数据,或者set、map之类的。
- 并查集能解决那些问题,哪些场景会用到并查集
- 并查集原理以及代码实现
- 并查集写法的常见误区
- 带大家去模拟一遍并查集的过程
- 路径压缩的过程
- 时间复杂度分析
上面这几个维度 大家都去思考了,并查集基本就学明白了。
其实理论基础篇就算是给大家出了一道裸的并查集题目了,所以在后面的题目安排中,会稍稍的拔高一些,重点在于并查集的应用上。
例如 并查集可以判断这个图是否是树,因为树的话,只有一个根,符合并查集判断集合的逻辑,题目:0108.冗余连接。
在0109.冗余连接II 中 对有向树的判断难度更大一些,需要考虑的情况比较多。
#最小生成树
最小生成树是所有节点的最小连通子图, 即:以最小的成本(边的权值)将图中所有节点链接到一起。
最小生成树算法,有prim 和 kruskal。
prim 算法是维护节点的集合,而 Kruskal 是维护边的集合。
在 稀疏图中,用Kruskal更优。 在稠密图中,用prim算法更优。
边数量较少为稀疏图,接近或等于完全图(所有节点皆相连)为稠密图
Prim 算法 时间复杂度为 O(n^2),其中 n 为节点数量,它的运行效率和图中边树无关,适用稠密图。
Kruskal算法 时间复杂度 为 O(nlogn),其中n 为边的数量,适用稀疏图。
关于 prim算法,我自创了三部曲,来帮助大家理解:
- 第一步,选距离生成树最近节点
- 第二步,最近节点加入生成树
- 第三步,更新非生成树节点到生成树的距离(即更新minDist数组)
大家只要理解这三部曲, prim算法 至少是可以写出一个框架出来,然后在慢慢补充细节,这样不至于 自己在写prim的时候 两眼一抹黑 完全凭感觉去写。
minDist数组 是prim算法的灵魂,它帮助 prim算法完成最重要的一步,就是如何找到 距离最小生成树最近的点。
kruscal的主要思路:
-
边的权值排序,因为要优先选最小的边加入到生成树里
-
遍历排序后的边
- 如果边首尾的两个节点在同一个集合,说明如果连上这条边图中会出现环
- 如果边首尾的两个节点不在同一个集合,加入到最小生成树,并把两个节点加入同一个集合
而判断节点是否在一个集合 以及将两个节点放入同一个集合,正是并查集的擅长所在。
所以 Kruskal 是需要用到并查集的。
这也是我在代码随想录图论编排上 为什么要先 讲解 并查集 在讲解 最小生成树。
#拓扑排序
拓扑排序 是在图上的一种排序。
概括来说,给出一个 有向图,把这个有向图转成线性的排序 就叫拓扑排序。
同样,拓扑排序也可以检测这个有向图 是否有环,即存在循环依赖的情况。
拓扑排序的一些应用场景,例如:大学排课,文件下载依赖 等等。
只要记住如下两步拓扑排序的过程,代码就容易写了:
- 找到入度为0 的节点,加入结果集
- 将该节点从图中移除
#最短路算法
最短路算法是图论中,比较复杂的算法,而且不同的最短路算法都有不同的应用场景。
我在 最短路算法总结篇 里已经做了一个高度的概括。
大家要时常温故而知新,才能透彻理解各个最短路算法。
#总结
到最后,图论终于剧终了,相信这是市面上大家能看到最全最细致的图论讲解教程。
图论也是我 《代码随想录》所有章节里 所费精力最大的一个章节。
只为了不负录友们的期待。 大家加油💪🏻
相关文章:
代码随想录算法训练营第74天:路径总结[1]
代码随想录算法训练营第74天:路径总结 A * 算法精讲 (A star算法) 卡码网:126. 骑士的攻击(opens new window) 题目描述 在象棋中,马和象的移动规则分别是“马走日”和“象走田”。现给定骑士的起始坐标和目标…...

用 Emacs 写代码有哪些值得推荐的插件
以下是一些用于 Emacs 写代码的值得推荐的插件: Ido-mode:交互式操作模式,它用列出当前目录所有文件的列表来取代常规的打开文件提示符,能让操作更可视化,快速遍历文件。Smex:可替代普通的 M-x 提示符&…...

自定义注解-手机号验证注解
注解 package com.XX.assess.annotation;import com.XX.assess.util.MobileValidator;import javax.validation.Constraint; import javax.validation.Payload; import java.lang.annotation.*;/*** 手机号校验注解* author super*/ Retention(RetentionPolicy.RUNTIME) Targe…...

华为od-C卷200分题目5 -项目排期
华为od-C卷200分题目5 -项目排期 题目描述 项目组共有N个开发人员,项目经理接到了M个独立的需求,每个需求的工作量不同,且每个需求只能由一个开发人员独立完成,不能多人合作。 假定各个需求之间无任何先后依赖关系,请…...

如何使用Pip从Git仓库安装Python包:深入探索远程依赖管理
如何使用Pip从Git仓库安装Python包:深入探索远程依赖管理 Python的包管理工具Pip使得安装和管理Python库变得非常简单。有时,我们需要安装那些尚未发布到PyPI的包,或者想要尝试最新的开发版本。这时,可以直接从Git仓库安装包。本…...
计算机专业怎么选择电脑
现在高考录取结果基本已经全部出来了,很多同学都如愿以偿的进入到了计算机类专业,现在大部分同学都在为自己的大学生活做准备了,其中第一件事就是买电脑,那计算机类专业该怎么选择电脑呢? 计算机专业是个一类学科&…...

当前国内可用的docker加速器搜集 —— 筑梦之路
可用镜像加速器 以下地址搜集自网络,仅供参考,请自行验证。 1、https://docker.m.daocloud.io2、https://dockerpull.com3、https://atomhub.openatom.cn4、https://docker.1panel.live5、https://dockerhub.jobcher.com6、https://hub.rat.dev7、http…...

【腾讯内推】腾讯2025校招/青云计划/社招——长期有效
及时跟进进度,保证不让简历石沉大海! 涵盖NLP/CV/CG/ML/多模态/数据科学/多媒体等各方向! 定向匹配优质团队/竞争力薪酬/覆盖全球工作地点! 招聘对象: 本硕博:2024年1月-2025年12月毕业的同学 目前最热岗位: 技术研究-自然语言处理 技术研究-计算机视觉 …...

集群限流sentinel实践
参考: 集群模式 实践 集群流控规则 其中 用一个专门的 ClusterFlowConfig 代表集群限流相关配置项,以与现有规则配置项分开: // 全局唯一的规则 ID,由集群限流管控端分配. private Long flowId;// 阈值模式,默认&…...
Flutter-实现双向PK进度条
如何实现一个双向PK进度条 在Flutter应用中,进度条是一个非常常见的组件。而双向PK进度条则能够展示两个对立的数值,如对战中的双方得分对比等。本文将介绍如何实现一个具有双向PK效果的进度条,并支持竖直和斜角两种过渡效果。 1. 需求 我…...
unix高级编程系列之文件I/O
背景 作为linux 开发者,我们不可避免会接触到文件编程。比如通过文件记录程序配置参数,通过字符设备与外设进行通信。因此作为合格的linux开发者,一定要熟练掌握文件编程。在文件编程中,我们一般会有两类接口函数:标准…...
,记录最后一次访问文件的路径)
PySide(PyQt),记录最后一次访问文件的路径
1、在同目录下用文本编辑器创建JSON文件,命名为setting.json,并输入以下内容后保存: { "setting": { "last_file": [ "" ] } } 2、应用脚本: import json …...

wordpress企业网站模板免费下载
大气上档次的wordpress企业模板,可以直接免费下载,连注册都不需要,网盘就可以直接下载,是不是嘎嘎给力呢 演示 https://www.jianzhanpress.com/?p5857 下载 链接: https://pan.baidu.com/s/1et7uMYd6--NJEWx-srMG1Q 提取码:…...

[leetcode hot 150]第一百一十七题,填充每个节点的下一个右侧节点
题目: 给定一个二叉树: struct Node {int val;Node *left;Node *right;Node *next; } 填充它的每个 next 指针,让这个指针指向其下一个右侧节点。如果找不到下一个右侧节点,则将 next 指针设置为 NULL 。 初始状态下&#x…...
-- 网络配置总结)
Docker 入门篇(十 一)-- 网络配置总结
Docker 容器技术的核心优势之一是其轻量级的虚拟化和隔离性,而 Docker 网络则是实现容器间以及容器与外界通信的关键。以下是对 Docker 网络的关键知识点的总结。 一、 Docker 网络概述 Docker 网络允许容器进行相互通信以及与外部网络的连接。Docker 提供了多种网…...

【Android面试八股文】Android 有哪些存储数据的方式?
在Android平台上,有多种方式可以存储数据,每种方式都适合不同类型的数据和使用场景。以下是主要的存储数据方式: SharedPreferences(轻量级数据存储): SharedPreferences是用于存储简单键值对数据的最简单方法,适合存储用户偏好设置、配置信息等。数据以XML文件形式存储…...

3. train_encoder_decoder.py
train_encoder_decoder.py #__future__ 模块提供了一种方式,允许开发者在当前版本的 Python 中使用即将在将来版本中成为标准的功能和语法特性。此处为了确保代码同时兼容Python 2和Python 3版本中的print函数 from __future__ import print_function # 导入标准库…...

Hyper-V克隆虚拟机教程分享!
方法1. 使用导出导入功能克隆Hyper-V虚拟机 导出和导入是Hyper-V服务器备份和克隆的一种比较有效的方法。使用此功能,您可以创建Hyper-V虚拟机模板,其中包括软件、VM CPU、RAM和其他设备的配置,这有助于在Hyper-V中快速部署多个虚拟机。 在…...
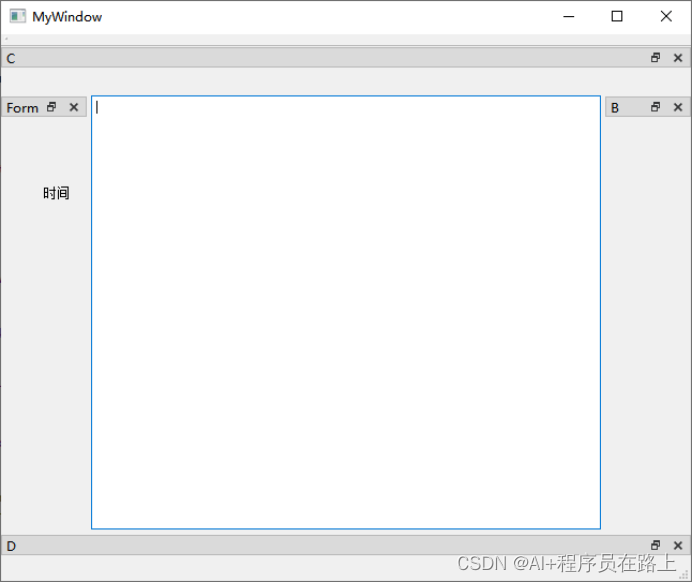
QDockWidget类详解
一.QDockWidget类概述 1.QDockWidget类 QDockWidget类提供了一个特殊的窗口部件,它可以是被锁在QMainWindow窗口内部或者是作为顶级窗口悬浮在桌面上。 QDockWidget类提供了dock widget的概念,dock widget也就是我们熟悉的工具面板或者是工具窗口。Do…...
vue3.0(十六)axios详解以及完整封装方法
文章目录 axios简介1. promise2. axios特性3. 安装4. 请求方法5. 请求方法别名6. 浏览器支持情况7. 并发请求 Axios的config的配置信息1.浏览器控制台相关的请求信息:2.配置方法3.默认配置4.配置的优先级5.axios请求响应结果 Axios的拦截器1.请求拦截2.响应拦截3.移…...

AMLP框架实战:基于MACE构建高精度机器学习势函数
1. 项目概述:当机器学习势函数遇上自动化管道在计算化学和材料科学领域,我们长久以来面临着一个核心矛盾:精度与效率的权衡。密度泛函理论(DFT)能提供接近实验的精度,但计算成本高昂,通常只能处…...

13456
12356...

写论文的神助攻!好用的AI写作辅助软件,逻辑清晰质量高
作为一名刚完成毕业论文的过来人,我太懂写论文的痛苦了 —— 选题迷茫、文献浩如烟海、框架混乱、逻辑不清、反复修改、查重降重反复折腾... 直到我发现了这套 AI 写作工具组合,简直是论文写作的 "开挂神器",效率直接拉满ÿ…...

《我看见的世界:李飞飞自传》第1-6章阅读笔记:从移民少女到AI教母的“看见“之旅
前言 当我们谈论人工智能时,我们谈论的是算法、数据、算力,是那些冰冷的代码和复杂的模型。但在《我看见的世界:李飞飞自传》中,李飞飞用她独特的视角告诉我们:AI的本质,是人类对"看见"世界的渴望…...

如何快速批量下载高质量歌词:ZonyLrcToolsX跨平台终极解决方案
如何快速批量下载高质量歌词:ZonyLrcToolsX跨平台终极解决方案 【免费下载链接】ZonyLrcToolsX ZonyLrcToolsX 是一个能够方便地下载歌词的小软件。 项目地址: https://gitcode.com/gh_mirrors/zo/ZonyLrcToolsX 还在为本地音乐库缺少歌词而烦恼吗࿱…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

从零构建FOC轮腿机器人:开源平衡机器人完整指南
从零构建FOC轮腿机器人:开源平衡机器人完整指南 【免费下载链接】foc-wheel-legged-robot Open source materials for a novel structured legged robot, including mechanical design, electronic design, algorithm simulation, and software development. | 一个…...

告别鼠标点击,微博图片批量下载的轻松方案
告别鼠标点击,微博图片批量下载的轻松方案 【免费下载链接】weiboPicDownloader Download weibo images without logging-in 项目地址: https://gitcode.com/gh_mirrors/we/weiboPicDownloader 还记得那个周末的下午吗?你喜欢的博主发布了九宫格美…...

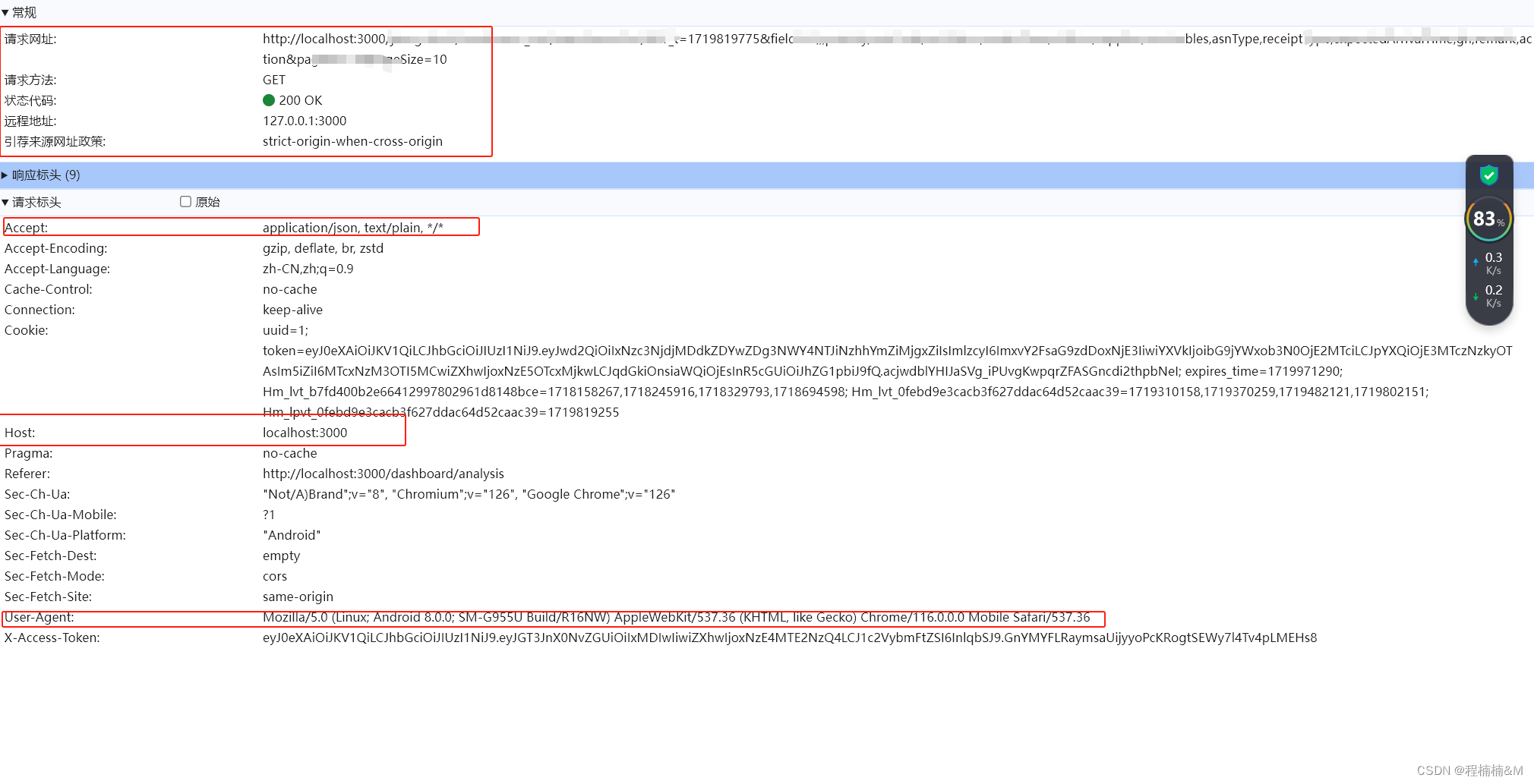
使用curl命令调试Taotoken API接口的常见问题排查
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令调试Taotoken API接口的常见问题排查 基础教程类,面向所有需要通过HTTP直接与API交互的开发者,…...

计算机视觉的实战项目:从0到1搭建属于自己的图像识别系统
作为软件测试从业者,我们每天都在和各类功能验证、兼容性测试、自动化测试框架打交道,对AI领域的实战项目往往觉得“门槛高”“和日常工作不沾边”。但随着AI技术在互联网产品中的落地越来越深入,图像识别功能已经成为很多APP、智能硬件的核心…...