webrtc gcc详解
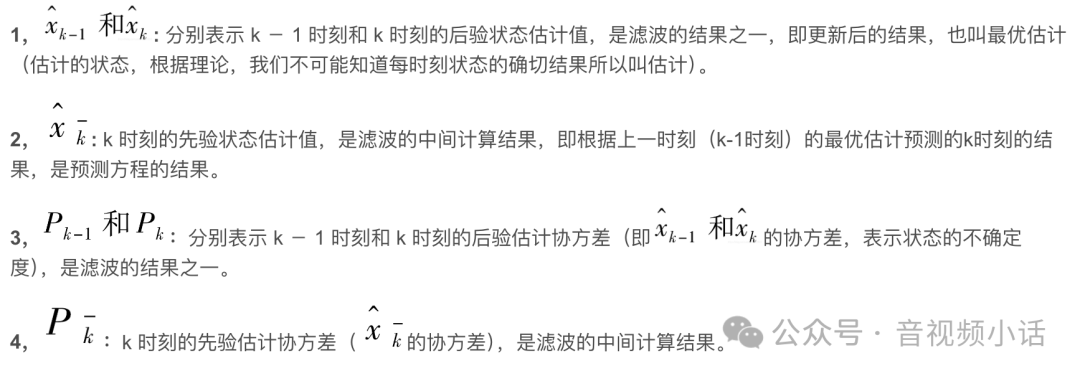
webrtc的gcc算法(Google Congestion Control),貌似国内很多文章都没有细讲,原理是怎么样的,具体怎么进行计算的。这里详解一下gcc。
gcc算法,主要涉及到:
-
拥塞控制的关键信息和公式
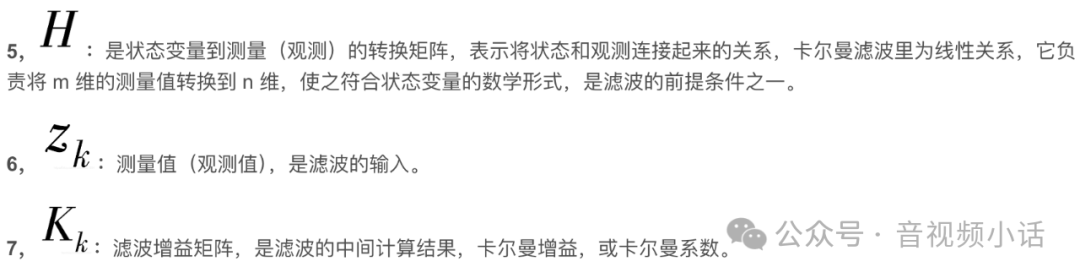
-
卡曼滤波算法
-
gcc如何使用卡曼滤波算法
因为知识点有点多,文章有点长,如果感兴趣但不能一次读完,可以先收藏后,有空慢慢看。
1. 前言
对于拥塞控制,webrtc的方案之一是gcc(Google Congestion Control)。具体做法是,接收端监控两个数据,并反馈给发送端。
-
丢包率: 接收端计算出丢包率,定期发送rtcp rr报文(内有丢包率)给发送端,发送端通过丢包率的大小来决定是否降低编码的bitrate;
-
基于卡曼滤波的带宽预测: 接收端预测出当前发送端到接收端的带宽,接收端再发送rtcp remb报文(内带有预测带宽)给发送端,发送端根据该预测带宽调整编码的bitrate;
基于丢包率来调整动态编码,是比较简单,很多厂家经常在sfu服务的进行调整,如:如果不是长肥型网络,在丢包率<30%的情况下,rtcp rr中的丢包率和丢包总数欺骗性的填写0,这样发送端(尤其是web端)就不会轻易的降低bitrate,到达测试的良好效果。
但是基于卡曼滤波的带宽预测,就比较复杂,本文主要讲解这部分的原理和实现。
2. 拥塞基础信息与公式
延时是如何测量出来的: 定义报文到达的时间为t(i),报文中的时间戳为T(i)。
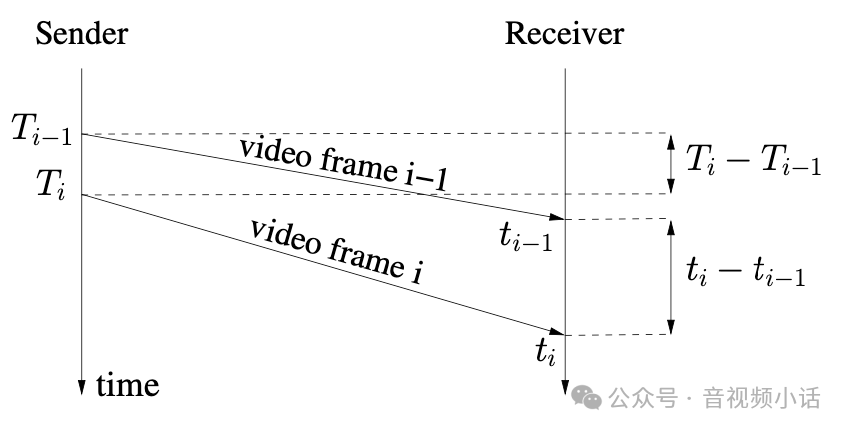
那么定义延时:
d(i) = t(i)-t(i-1)-(T(i)-T(i-1))在带宽容量C的链路上,传输frame size为L的数据,需要的时间是: ts = L/C
我们对到达时间的间隔进行建模:
L(i)-L(i-1)d(i) = -------------- + w(i) = dL(i)/C+w(i)C
上面的公式,i为某个时刻,i-1为上一个时刻。
L(i): 是i时刻接收到的报文长度(这里一般是指某个固定时段接收到的报文size总和)
L(i-1): 是对于i的上一个时刻的报文长度(上一个固定时段收到的报文size总和)
C: 为链路容量带宽;
W(i): 作为一个高斯白噪声,这个参数非常重要。
d(i):是i时刻的延时
划重点:
如果链路使用超载,w(i)增加;
如果链路比较空,w(i)减小;
也就是说,上面两个公式就是预测和估计w(i)是增加了,还是减小了。
总结,关键公式就是这两个:
公式1(测量):d(i) = t(i)-t(i-1)-(T(i)-T(i-1))公式2(估计):L(i)-L(i-1)d_est(i) = ------------ + w(i) = dL(i)/C+w(i)C
公式1: 两个时刻的接收报文的本地时间差值,再减去两个时刻的rtp报文中携带的时间戳的差值,结果等于延时(本地时间与rtp报文中时间戳的单位不一致,需要自己转换一致后再计算)。也就是说d(i)是个测量值,每次收到新的一批报文都能测算得出来对应的延时d(i),所以这里强调d(i)是个测量值。
公式2: 在公式2中,dL(i)是两个时刻收到报文长度的差值,这个也是每收到一批报文后能测算出来的,dL(i)也是个测量值。1/C是个估计值,C是估计的带宽容量,w(i)也是一个估计值。注意,公式左边的d_est(i)也是表示i时刻的延时,不过这个延时是通过右边的估计值计算出来的,也就是这个计算出来的d_est(i)是一个估计值。
最后,我们得到,每个i时刻的测量值d(i),和测量值dL(i),要预测出1/C(i)和w(i),这就是我们的目标。
强调: w(i)增加,表示链路超载;w(i)减小,表示链路轻负荷。
卡曼滤波就是要预测出1/C(i)和w(i),并根据根据w(i)是增加或减小,来决定预测带宽是增加还是减小。
小白部分: 既然有了公式1和2,为啥不每次直接计算出延时和带宽的关系,为啥还要引入卡曼滤波算法,弄这么复杂。原因主要是,凡是测试的数据,都会出现测不准,或者有偶尔发生的错误数据(术语叫作噪声),比如某时刻发生抖动,仅仅一批数据产生巨大的延时,但是其实网络是好的,滤波的作用就是过滤出一些无效,错误数据的影响。
先记住这两个公式,后面先打断一下,简单介绍一下卡曼滤波算法。
3. 卡曼滤波算法和示例
针对测试数据,有测试不准确的情况,所以需要在测试数据和估计数据之间进行权衡,卡曼滤波算法就是一个线性的滤波估计算法。
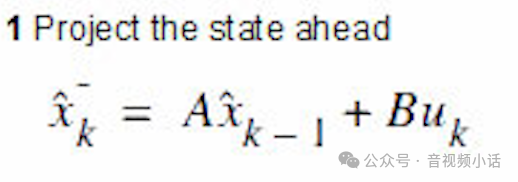
卡曼滤波的5个公式如下(如果看公式有不理解的地方,后面会有个经典的例子,让你理解如何使用这5个公式):
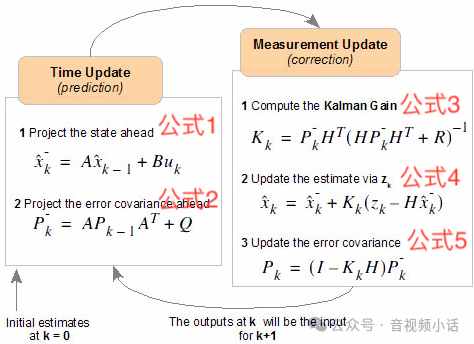
一共5个方程,如上图,左边两个是时间更新方程(预测),右边是测量更新方程(更新/纠正)。
如果第一次接触卡曼滤波算法,可以先熟悉算法,先不研究这5个公式的由来(数学推导),可以作为使用者,只要知道每个变量代表什么意思,如何代入方程,就能满足基础的需求。
头两个预测方程中的参数含义:
A: 状态转移矩阵,就是上一个状态的x变量如何能推导出下一个状态的值。
B:是将输入转换为状态的矩阵;
Q:过程激励噪声协方差(系统过程的协方差)。
后三个测量更新方程的参数含义:
R: 测量噪声协方差。滤波器实际实现时,测量噪声协方差 R一般可以观测得到,是滤波器的已知条件,用户可以根据自己的情况自己设定。

因为公式较多,参数也较多,不容易让人理解,下面举个经典的例子,让你熟悉这些公式和参数。
3.1 卡曼滤波例子(自由落体运动)
假设一个实心球从高空落下,正常来说,我们是能通过速度,加速度g(自由落体加速度9.8米/s),能计算出某个时刻该球的行驶距离速度。
但是因为有空气阻力,或者外界干扰(刮风什么的),实际的速度和距离就不能自己计算出来,需要进行测试。假设实心球自己是能测试出距离和速度的,但是测试仪得出的值可能有误差,需要和计算出来的距离和速度进行折中。
卡曼滤波算法,就是对估计值与测试值进行折中,寻找出真相值的过程。
距离,速度和加速度在时间t上的关系:
s(i) = s(i-1) + v(i-1)*t + 0.5*g*t^2v(i) = v(i-1) + g*t
用线性代数的矩阵来表示就是:
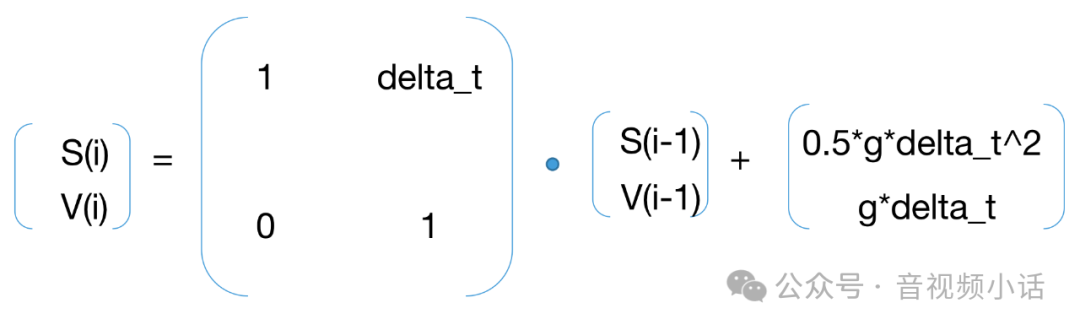
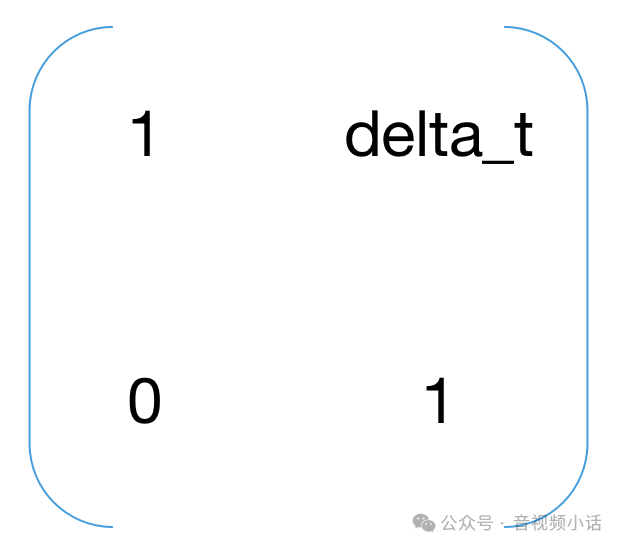
上面这个式子就是卡曼滤波公式1:
A就是:
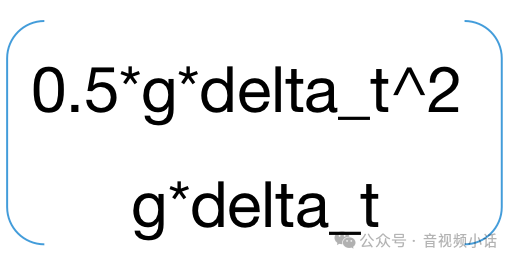
Bu就是:
卡曼滤波的公式2:
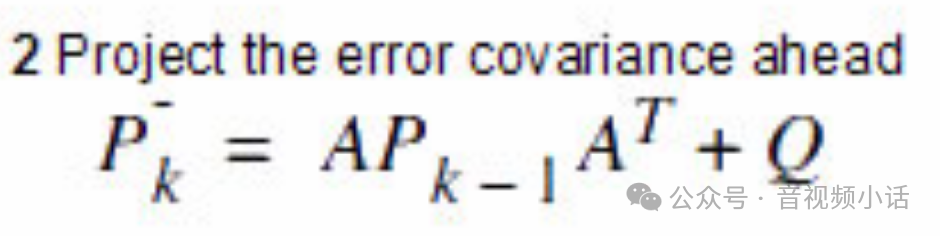
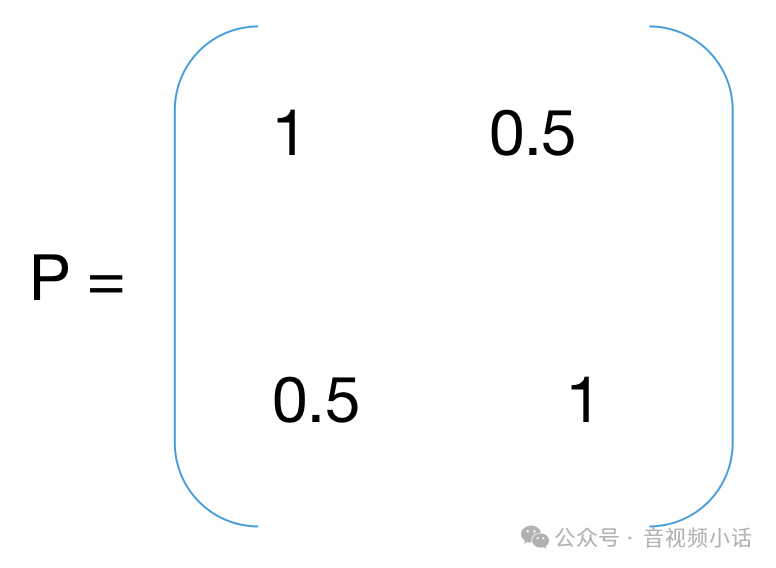
其中P是一个协方差矩阵,可以自己初始化一下,协方差矩阵是一个对角矩阵(后续随着数据的输入,P会不断通过公式2和公式5自我更新):
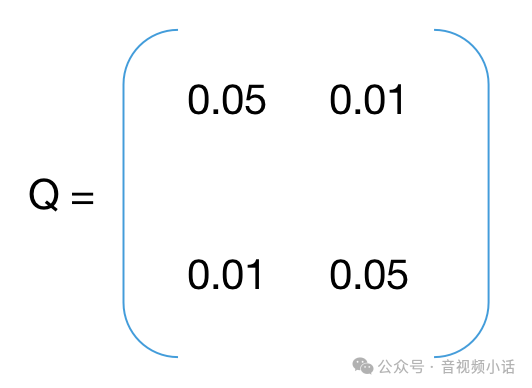
Q是过程激励噪声协方差,表示噪声,可以自己初始化:
卡曼滤波公式3:
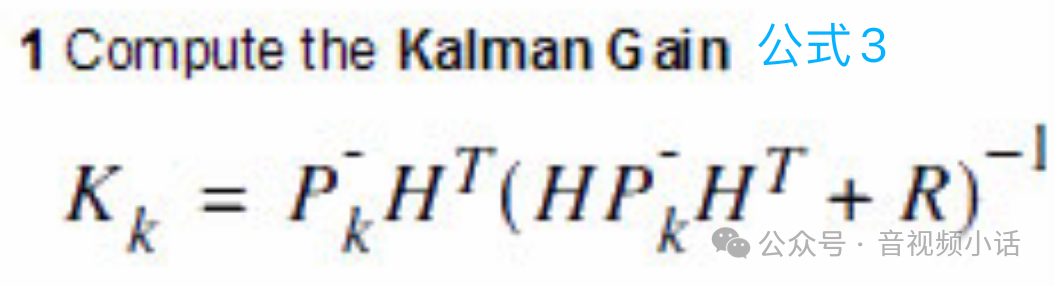
其中H是状态变量与测试变量的转换矩阵,因为本例是完全对应的关系,所以这里的H是一个单位矩阵。
R是误差,这里是两个参数s和v,假设测试参数还是比较准,R可以适当的设置小一些(自己更具情况设置):
这样卡曼滤波参数K就可以通过P,H,R三个参数计算出来了。
卡曼滤波公式4:
通过公式3,已经计算出K,参数Z是测试值,本例中Z就是一个向量包含距离和速度(s, v),式子右边的X就是公式1中计算出来的预测值向量(s, v)

公式4非常重要,通过这个公式,对计算估计出来的值,与测试的值进行折中,得出尽可能接近真实的值。
卡曼滤波公式5:
I是单位矩阵,K是公式3计算出来的卡曼滤波增益参数,H是状态变量与测试变量的转换矩阵(本例中是个单位矩阵),式子右边的P是公式2预测的P矩阵。
通过公式5的计算,对P协方差矩阵进行更新。
对上面的5个公式解释后,这里用python进行模拟,代码如下:
import numpy as npdelta_t = 1 #每次变化是1秒a = 9.8 #重力加速度g# 状态迁移矩阵AA = np.array([[1, delta_t],[0, 1]])# 协方差矩阵P = np.array([[1, 0.5],[0.5, 1]])# 预测值与测试值的变换矩阵H = np.array([[1, 0],[0, 1]])# 过程激励噪声协方差Q = np.array([[0.05, 0.01],[0.01, 0.05]])# 观测噪声协方差R = np.array([[0.01, 0.01],[0.01, 0.01],])# 单位矩阵I = np.eye(2)# 每1秒的测试值,第一项是距离,第二项是速度messure_list = np.array([[2.9, 8.8],[19.1, 18.1],[44.1, 28.9],[84.9, 38.7],[134, 50],[193.4, 62.3],[266.1, 72.1],[348.6, 83.4],[442.4, 95.7],[548, 105.5]])# 卡曼滤波公式1: 状态迁移def StatePridict(pos, speed):x_vector = np.array([[pos], [speed]])b_u = np.array([[0.5*a*delta_t*delta_t], [a*delta_t]])result = np.dot(A, x_vector) + b_ureturn result# 卡曼滤波公式3: 计算卡曼滤波增益参数Kdef UpdateK():up_item = np.dot(P, H.transpose())down_item = np.dot(np.dot(H, P), H.transpose()) + Rinv_item = np.linalg.inv(down_item)return np.dot(up_item, inv_item)i = 0predict_array = np.array([[],[]])pos_predict = 0speed_predict = 0for z in messure_list:# 方程1: 状态预测公式(根据距离,速度,时间公式推导)next = StatePridict(pos_predict, speed_predict)print("predict next:", next)# 方程2: 协方差矩阵预测公式P = np.dot(np.dot(A, P), np.transpose(A)) + Qprint("predict P:", P)# 方程3: 卡曼滤波增益计算公式K = UpdateK()print("update K:", K)# 方程4: 状态更新公式messure_item = z.reshape(-1, 1)print("messure item(", i, "):", messure_item, "shape:", messure_item.shape)deviation = messure_item - np.dot(H, next)print("deviation:", deviation)next = next + np.dot(K, deviation)predict_array = np.append(predict_array, next)pos_predict = next[0][0]speed_predict = next[1][0]print("update next state pos:", pos_predict, "velocity:", speed_predict)# 方程5: 协方差更新公司P = np.dot((I - K * H), P)print("update P:", P)i = i + 1print("")
把这个程序跑起来,观测各个参数的变化过程,仔细阅读,慢慢就理解这5个公式怎么使用。
4. GCC应用卡曼滤波算法
在第2章中,回忆一下这两个公式:
公式1(测量):d(i) = t(i)-t(i-1)-(T(i)-T(i-1))公式2(估计):L(i)-L(i-1)d_est(i) = ------------ + w(i) = dL(i)/C+w(i)C
每个i时刻的测量值d(i),和测量值dL(i),要预测出1/C(i)和w(i),这就是我们的目标。
w(i)增加超过一个阈值,表示链路超载,w(i)减小了,表示链路轻负荷。
卡曼滤波就是要预测出1/C(i)和w(i),并根据根据w(i)是增加或减小,来决定预测带宽是增加还是减小。本节介绍如何预测1/C(i)和w(i)。
回忆一下卡曼滤波的5个公式:
这里,因为向量中的两个参数[1/C w],自身是没法推导自己,所以卡曼滤波的公式1和公式2就省略了,或者说A矩阵就是个单位矩阵,Bu是0,这样预测后的结果还是自己。
这样就直接构造公式3:
X就是[1/C W]向量的转置
H矩阵= [delta_len 1],delta_len就是两次不同时刻统计收到报文长度的差值。
R是误差,在本例中可以自己设置,在webrtc源码实现中通过UpdateNoiseEstimate函数来更新获取(为了突出主线,这里先省略)。
这样公式3的K就计算出来了。
公式4,更新估计值,

Z就是i时刻的测试数据的延时delay(i),通过d(i) = t(i)-t(i-1)-(T(i)-T(i-1))得到i时刻的延时。
公式5,
等式右边的P是公式2中计算出来的P,因为公式1和2都省略,所以这里值需要确认H就可以
H = [delta_len 1].T
I是单位矩阵。
因为K在公式3中已经计算出来,所以P很容易计算出来。
4.1 python仿真gcc的卡曼滤波
delay_array:表示收到报文测试出来的延时集合
deltalen_array:表示收到报文长度差值的集合
两者作为测试数据,数组下标是一一对应的。
import numpy as np# d(i) = dL(i)/C + m(i) +v(i) 关键点: 过载的情况,m(i)增加; 轻载的情况,m(i)减小# theta_bar(i) = [1/C(i) m(i)]^T 其中,带宽C(i)可以设置个初始值,m(i)也设置一个初始值, 后面这两个值就是根据每一次的测试数据来进行预测;# h_bar(i) = [dL(i) 1]^T 其中dL(i)是每次长度变化值,是测试的输入# 方程1: 状态预测公式(根据报文差,带宽公式推导)# 本例没有[1/C(i) m(i)]这个向量自己预测自己的公式,这个公式省略掉,或则说就是自己等于自己# 方程2: 协方差矩阵预测公式# 同方程1,因为没有预测公式,这个方程也省略掉;# 方程3: 卡曼滤波增益计算公式# P_(i) * h_bar(i)# K(i) = --------------------------------------------# var_v_hat + h_bar(i)^T * P_(i) * h_bar(i)# 其中P_(i)是协方差矩阵,见方程2; var_v_hat是误差,自己可以初始化一个# 方程4: 状态更新公式# d(i) = h_bar(i)^T * theta_bar(i) + v(i) 两个矩阵的点乘,就是dL(i)/C + m(i)这个式子,v(i)是一个噪声参数(可以初始设定一个较小的值)# z(i) = D(i) - d(i) 这里的D(i)是延时的测试数据,也就是报文来的差值,d(i)是预测数据# z(i) = D(i) - (h_bar(i)^T * theta_bar(i-1) + v(i))# new_theta_bar(i) = theta_bar(i) + K(i) * z(i) 这个式子就是状态更新公式,更新得到新的[1/C(i) m(i)]# 方程5: 协方差更新公式# P(i) = (I - K(i) * h_bar(i)^T) * P_(i) + Q(i) 其中P(i)是协方差矩阵,Q(i)是误差delay_array = [-4.45, 3.92, -3.5, -0.29, 10.77, -6.2, 6.98, -2.75, -8.88, -0.12, 0.78, -0.32, 2.05, -1.61, 3.67, 3.93, 13.23, 51.25, 15.32, 51.05, 124.61, -14.47, 9.43, 43.11, -10.98, 27.03, 34.31, 52.31, 132.39, -9.93, -1.63, 20.47, 54.73, 12.43, 19.86, 0.6, 78.59, -0.2, 35.04, 8.0, 68.9, 6.65, 82.35, 25.6, 108.01, -1.68, 42.52, 7.66, 82.26, 1.68, -0.39, 65.92, 15.35, 77.69, -2.38, -4.94, 9.82, -12.88, 132.41, -0.57, 81.74, 0.13, 33.81, -16.92, -18.68, -1.04, -56.98, 27.08, 0.44, -10.58, -23.03, 23.82, 36.17, -47.1, -140.67, 28.14, -30.56, -72.59, -21.58, -45.59, -87.41, 12.47, 1.0, -3.05, -37.41, -32.05, 22.89, 7.52, 11.13, 34.15, 88.15, -42.39, -2.78, -52.67, -16.58, 5.19, 55.34, 44.73, -13.97, 0.22, 7.63, 27.57, 49.72, 61.74, 18.91, 48.0, -24.09, -6.95, -50.06, 217.24, -62.06, -2.07, 5.83, -3.88, -6.4, 4.35, 39.61, -7.67, 5.65, 9.45, 70.02, -48.47, 35.76, 8.69, -6.4, -4.5, -2.26, -21.2, -53.22, -11.8, 12.25, -8.98, -2.94, -43.99, 1.12, -0.04, -8.08, 14.05, -31.01, -80.63, 94.82, -25.58, -58.55, 47.87, -67.36, 17.57, 4.64, 0.1, 4.71, 7.01, -1.5, -3.25, -1.87, -22.01, 9.57, -8.71, -3.17, -2.12, -36.99, 54.74, -14.71, -8.64, -46.41, 48.79, 5.74, -14.25, -7.76, 30.98, -6.09, 43.08, 16.21, 15.78, -2.86, -63.44, 73.09, -39.69, -50.57, -14.58, -5.34, 5.39, -17.07, -28.32, -15.5, 6.03, -62.54, 1.0, 1.01, -13.52, -32.07, 75.16, -5.2, -0.91, 1.48, 41.72, -21.1, 11.13]deltalen_array = [-98.0, 170.0, -170.0, 314.0, 612.0, -926.0, 873.0, -541.0, 769.0, -1101.0, 0.0, -50.0, 50.0, 182.0, 1407.0, -1589.0, 776.0, -776.0, 55.0, -55.0, 1126.0, -1126.0, 80.0, -80.0, 305.0, -305.0, 278.0, -278.0, 1414.0, -1414.0, 2.0, -2.0, 642.0, -642.0, 387.0, -387.0, 771.0, -771.0, 352.0, -352.0, 746.0, -746.0, 776.0, -776.0, 1420.0, -1420.0, 567.0, -567.0, 923.0, -923.0, 0.0, 660.0, -660.0, 1012.0, -1012.0, 0.0, 0.0, 0.0, 1631.0, -1631.0, 890.0, -890.0, 700.0, -700.0, 0.0, 291.0, -291.0, 412.0, -412.0, 0.0, 75.0, 423.0, -27.0, -434.0, -37.0, 283.0, -115.0, -8.0, -160.0, 160.0, 0.0, -160.0, 0.0, 0.0, 484.0, -484.0, 219.0, -219.0, 0.0, 364.0, 492.0, -856.0, -160.0, 143.0, 17.0, -160.0, 853.0, -184.0, -509.0, 47.0, -47.0, 318.0, 385.0, -32.0, -671.0, 831.0, -831.0, 0.0, 0.0, 2097.0, -2097.0, 0.0, 85.0, -85.0, 0.0, 0.0, 0.0, 160.0, -160.0, 0.0, 1143.0, -983.0, 335.0, -495.0, 0.0, 194.0, -194.0, 0.0, 0.0, 0.0, -17.0, 177.0, -160.0, 0.0, 25.0, -25.0, 0.0, 335.0, 935.0, -1270.0, 941.0, -941.0, 0.0, 835.0, -835.0, 62.0, -62.0, 0.0, 0.0, 194.0, -194.0, 0.0, 0.0, 0.0, 0.0, 0.0, -17.0, 17.0, 0.0, 459.0, -459.0, 160.0, -160.0, 422.0, -422.0, 0.0, 0.0, 208.0, -208.0, 0.0, 946.0, -946.0, 0.0, 242.0, -242.0, 0.0, 0.0, 160.0, -160.0, 0.0, 0.0, 40.0, -40.0, 0.0, 0.0, 0.0, 160.0, -160.0, 320.0, 612.0, -932.0, 0.0, 0.0, 479.0, -479.0, 951.0]C = 50.0 #假设带宽C为50slope_c = 1.0/Cv = 5 #计算延时时候的噪声参数m = 0.1 #m参数,过载的情况,m增加; 轻载的情况,m减小R = 0.05P_Matrix = np.array([[100.0, 0.0],[0.0, 1e-1]])Q = np.array([[0.05, 0.01],[0.01, 0.05]])I = np.array([[1, 0],[0, 1]])def GetK(delta_len, p, r):h_bar = np.array([[delta_len], [1]])numerator = np.dot(p, h_bar)den = np.dot(np.dot(h_bar.T, p), h_bar)return np.dot(numerator, np.linalg.inv(den)) + rdef DelayUpdate(k, z, delta_len):h_bar = np.array([[delta_len], [1]])theta_bar = np.array([[slope_c], [m]])error = z - (np.dot(h_bar.T, theta_bar) + v)return theta_bar + k * errordef Update_P(k, p, delta_len): h_bar = np.array([[delta_len], [1]])p = p + Qreturn np.dot(I - np.dot(k, h_bar.T), p)index = 0for delta_len in deltalen_array:delay = delay_array[index]index = index + 1K = GetK(delta_len, P_Matrix, R)theta_bar_update = DelayUpdate(K, delay, delta_len)P_Matrix = Update_P(K, P_Matrix, delta_len)print("theta_bar_update:", theta_bar_update)
其中GetK函数的生成K卡曼滤波增益参数中,误差参数r是随机设置的。
实际的r是可以通过rtp报文时间戳的差值推导出来,更为精确,详细看这个函数UpdateNoiseEstimate()
4.2 gcc卡曼滤波源码部分
在函数OveruseEstimator::Update()中,
卡曼滤波公式3,计算出K:
const double h[2] = {fs_delta, 1.0};const double Eh[2] = {E_[0][0] * h[0] + E_[0][1] * h[1],E_[1][0] * h[0] + E_[1][1] * h[1]};const double denom = var_noise_ + h[0] * Eh[0] + h[1] * Eh[1];const double K[2] = {Eh[0] / denom, Eh[1] / denom};
卡曼滤波公式4,计算出1/C,和w,在源码中slope_就是1/C, offset_就是w。residual就是误差部分,其实就是测量值和估计值的差值。
// residual就是误差部分,其实就是测量值和估计值的差值// 就是python里写的:error = z - (np.dot(h_bar.T, theta_bar) + v)const double residual = t_ts_delta - slope_ * h[0] - offset_;// slope_就是1/Cslope_ = slope_ + K[0] * residual;//offset_比较关键,offset_就是w// w(i)增加,链路使用超载// w(i)减小,链路比较空offset_ = offset_ + K[1] * residual;
上面就是卡曼滤波部分,代码不多,就是原理比较复杂。
4.3 如何判断带宽增减
在4.2中已经能时刻更新offset_的值,也就是我们之前说的公式中:
L(i)-L(i-1)d_est(i) = ------------ + w(i) = dL(i)/C+w(i)C
上面公式中的w(i)就是offset_,
-
w(i)增加(也就是offset_),链路使用超载
-
w(i)减小(也就是offset_),链路比较空
但是如何判断增加和减小多少,这个增量/减量多少认为该做带宽的增减操作呢?
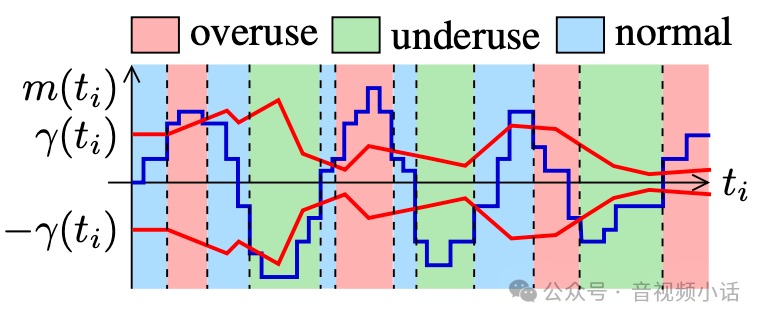
如上图的m(ti)就是m(ti) = std::min(num_of_deltas, kMaxNumDeltas) * offset; 这里的offset就是w(i)
γ (ti )就是threshold_,下面是gcc源码中,函数BandwidthUsage OveruseDetector::Detect(),大于threshold_则带宽过载,小于threshold_则是带宽轻载,否则就保持原状态。
BandwidthUsage OveruseDetector::Detect() {const double T = std::min(num_of_deltas, kMaxNumDeltas)* offset;if (T > threshold_) {hypothesis_ = BandwidthUsage::kBwOverusing;} else if (T < -threshold_) {hypothesis_ = BandwidthUsage::kBwUnderusing;} else {hypothesis_ = BandwidthUsage::kBwNormal;}}
通过Detect()返回值,判断是否变换预测带宽。
这个threshold_也是动态变化的,
根据OveruseDetector::UpdateThreshold()函数来更新:
void OveruseDetector::UpdateThreshold(){// k_up_(0.0087),// k_down_(0.039),const double k = fabs(modified_offset) < threshold_ ?k_down_ : k_up_;const int64_t kMaxTimeDeltaMs = 100;int64_t time_delta_ms = std::min(now_ms - last_update_ms_,kMaxTimeDeltaMs);threshold_ += k * (fabs(modified_offset) - threshold_)* time_delta_ms;threshold_ = rtc::SafeClamp(threshold_, 6.f, 600.f);last_update_ms_ = now_ms;}
这里有两个关键的参数k_up_(0.0087), k_down_(0.039)。
k_down_明显要比k_up_大不少,其含义就是预测带宽降低检测的时候,需要更加敏感一些,或者说是需要降低快一些;相反,带宽增减就需要慢一点,稳当一点,保证流畅性。
不少公司都对k_down_和k_up_的参数进行优化,来满足自己动态码率的需求。
5. 总结
最后总结一下,gcc的动态码率依赖两个东西:
-
丢包率
丢包率在接收端计算后,通过RTCP rr报文发送给发送端,丢包率>5%,默认就要开始降低编码bitrate;
如果是sfu服务器模式,sfu代码中可以把rtcp rr中的丢包率和丢包总数根据自定义条件填写0,这样发送端就不会动态调整编码bitrate,达到某些预期的效果
-
接收端基于延时的卡曼滤波带宽预测
1) 通过测试delay,和预测的delay来确定卡曼滤波模型,根据模型推导出下一步带宽预测offset。
公式1(测量):d(i) = t(i)-t(i-1)-(T(i)-T(i-1))公式2(估计):L(i)-L(i-1)d_est(i) = ------------ + w(i) = dL(i)/C+w(i)C
2) 得到卡曼滤波的变换值offset(也就是上面的w(i)),在根据计算出的threshold,用offset与threshold比较,决定预测带宽应该增加,减少还是不变。
相关文章:
webrtc gcc详解
webrtc的gcc算法(Google Congestion Control),貌似国内很多文章都没有细讲,原理是怎么样的,具体怎么进行计算的。这里详解一下gcc。 gcc算法,主要涉及到: 拥塞控制的关键信息和公式 卡曼滤波算法 gcc如何使用卡曼滤…...

Linux多进程和多线程(七)进程间通信-信号量
进程间通信之信号量 资源竞争 多个进程竞争同一资源时,会发生资源竞争。 资源竞争会导致进程的执行出现不可预测的结果。 临界资源 不允许同时有多个进程访问的资源, 包括硬件资源 (CPU、内存、存储器以及其他外 围设备) 与软件资源(共享代码段、共享数据结构) …...
【项目日记(一)】梦幻笔耕-数据层实现
❣博主主页: 33的博客❣ ▶️文章专栏分类:项目日记◀️ 🚚我的代码仓库: 33的代码仓库🚚 🫵🫵🫵关注我带你了解更多项目内容 目录 1.前言2.后端模块3数据库设计4.mapper实现4.1UserInfoMapper4.2BlogMapper 5.总结 1.…...

ElementUI的中国省市区级联数据插件element-china-area-data
安装 npm install element-china-area-data -S import 使用 import {provinceAndCityData,pcTextArr,regionData,pcaTextArr,codeToText, } from "element-china-area-data"; provinceAndCityData省市二级联动数据,汉字+coderegionData省市区三级联动数据pcTextAr…...
Kotlin算法:把一个整数向上取值为最接近的2的幂指数值
Kotlin算法:把一个整数向上取值为最接近的2的幂指数值 import kotlin.math.ln import kotlin.math.powfun main(args: Array<String>) {val number intArrayOf(2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18)number.forEach {println("$…...
简单且循序渐进地查找软件中Bug的实用方法
“Bug”这个词常常让许多开发者感到头疼。即使是经验丰富、技术娴熟的开发人员在开发过程中也难以避免遭遇到 Bug。 软件中的故障会让程序员感到挫败。我相信在你的软件开发生涯中,也曾遇到过一些难以排查的问题。软件中的错误可能会导致项目无法按时交付。因此&…...

基于springboot+vue+uniapp的高校宿舍信息管理系统小程序
开发语言:Java框架:springbootuniappJDK版本:JDK1.8服务器:tomcat7数据库:mysql 5.7(一定要5.7版本)数据库工具:Navicat11开发软件:eclipse/myeclipse/ideaMaven包&#…...

(完整音频)DockerHub、OpenAI、GitCode,脱钩时代,我们该如何自处?
本期主播 朱峰:「津津乐道播客网络」创始人,产品及技术专家。(微博:zhufengme)高春辉:「科技乱炖」主播。“中国互联网站长第一人”,科技、互联网领域的连续创业者。(微博࿱…...

macos 10.15系统下载包,macOS Catalina for mac
macOS Catalina 让你喜欢的种种 Mac 体验都更进一步。你可以领略音乐、播客这两款全新 Mac app 的表演;在 Mac 上畅享各款自己心爱的 iPad app;拿起 iPad 和 Apple Pencil,拓展工作空间,释放创意灵感;再打开那些平时常…...
 和 uni.showShareImageMenu({}) 的区别)
uni.showShareMenu({}) 和 uni.showShareImageMenu({}) 的区别
ChatGPT uni.showShareMenu({}) 和 uni.showShareImageMenu({}) 是 Uni-app 中两个不同的 API,它们的作用和用法有所不同: uni.showShareMenu({}) 作用:用于显示当前页面的分享菜单,通常显示在页面的右上角(类似于微…...

Spring Boot logback 日志文件配置
引入依赖 <dependency><groupId>org.projectlombok</groupId><artifactId>lombok</artifactId><version>1.18.24</version></dependency>logback-spring.xml 配置 <?xml version"1.0" encoding"UTF-8&quo…...
240705_昇思学习打卡-Day17-基于 MindSpore 实现 BERT 对话情绪识别
240705_昇思学习打卡-Day17-基于 MindSpore 实现 BERT对话情绪识别 近期确实太忙,此处仅作简单记录: 模型简介 BERT全称是来自变换器的双向编码器表征量(Bidirectional Encoder Representations from Transformers),…...

图像处理调试软件推荐
对于图像处理的调试,使用具有图形用户界面(GUI)且支持实时调整和预览的图像处理软件,可以大大提高工作效率。以下是几款常用且功能强大的图像处理调试软件推荐: ImageJ/FijiMATLABOpenCV with GUI LibrariesNI Vision …...
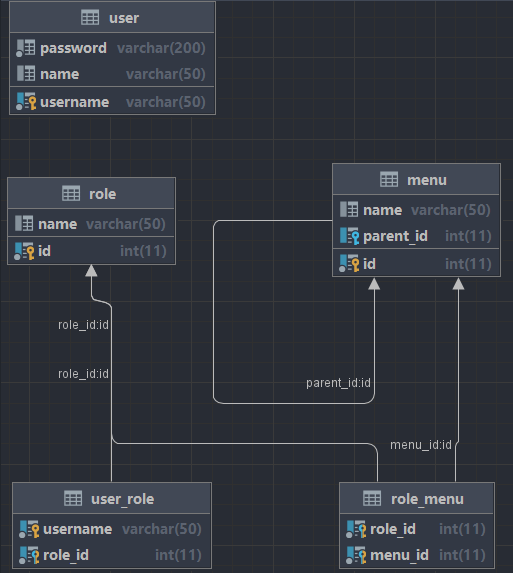
Mybatis实现RBAC权限模型查询
RBAC权限模型 Role-Based Access Control,中文意思是:基于角色(Role)的访问控制。这是一种广泛应用于计算机系统和网络安全领域的访问控制模型。 简单来说,就是通过将权限分配给➡角色,再将角色分配给➡用…...
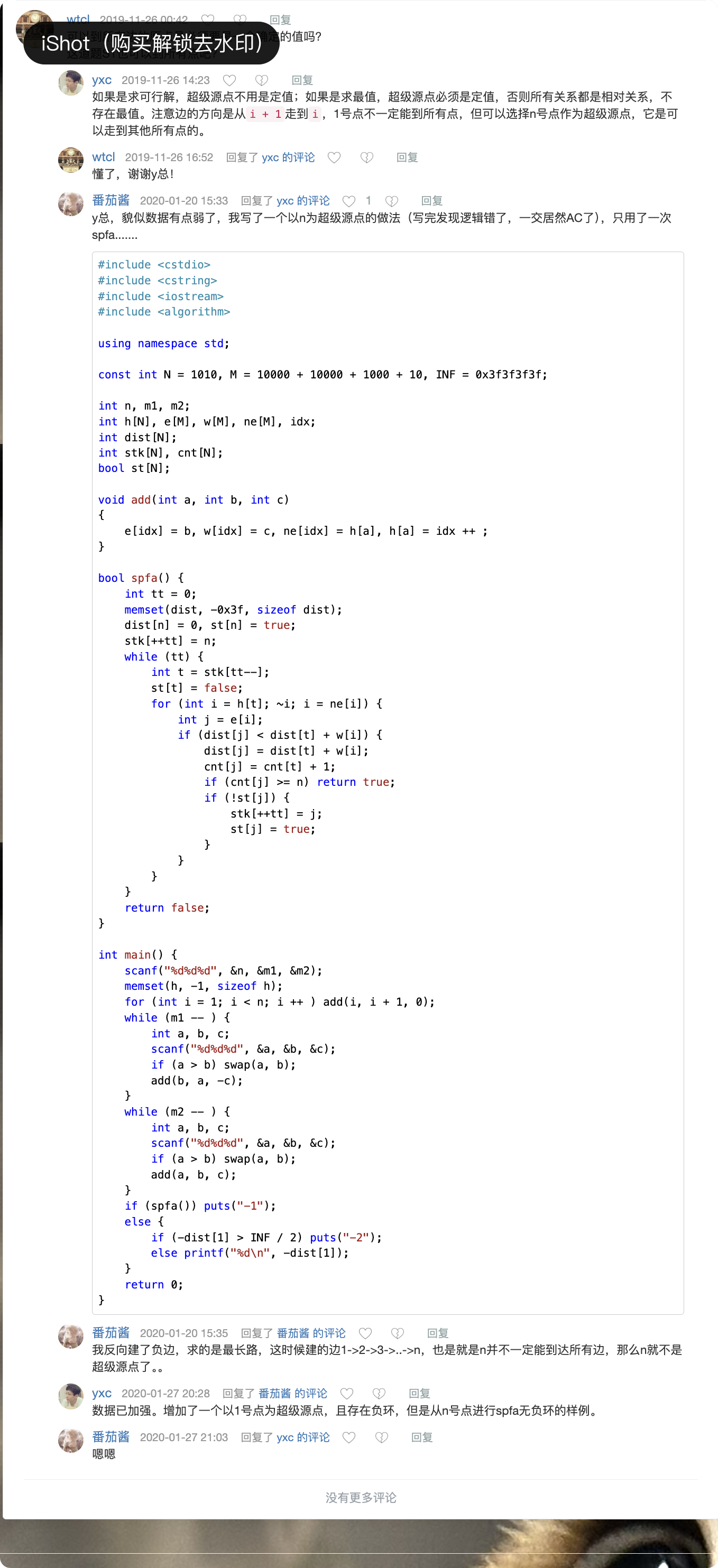
最短路算法——差分约束
差分约束 (1) 求不等式组的可行解 源点:从源点出发,一定可以走到所有的边求可行解步骤: 先将每个不等式 x i ≤ x j c x_i \le x_j c xi≤xjc,转化成一条从 s j s_j sj走到 s i s_i si,长度为 c k c_k ck 的一条边找…...

Log4j日志框架讲解(全面,详细)
目录 Log4j概述 log4j的架构(组成) Loggers Appenders Layouts 快速入门 依赖 java代码 日志的级别 log4j.properties 自定义Logger 总结: Log4j概述 Log4j是Apache下的一款开源的日志框架,通过在项目中使用 Log4J&…...

LeetCode 35, 242, 994
目录 35. 搜索插入位置题目链接标签思路代码 242. 有效的字母异位词题目链接标签思路代码 994. 腐烂的橘子题目链接标签思路代码 35. 搜索插入位置 题目链接 35. 搜索插入位置 标签 数组 二分查找 思路 本题与 704. 二分查找 十分相似,只不过本题在找不到 tar…...

ctfshow-web入门-文件包含(web87)巧用 php://filter 流绕过死亡函数的三种方法
目录 方法1:php://filter 流的 base64-decode 方法 方法2:通过 rot13 编码实现绕过 方法3:通过 strip_tags 函数去除 XML 标签 除了替换,新增 file_put_contents 函数,将会往 $file 里写入 <?php die(大佬别秀了…...

adb shell ps -T打印出来参数的含义,以及D,T,Z代表的状态含义是什么?
在Android系统中,使用adb shell ps命令可以查看当前系统中运行的进程信息。当你添加-T选项时(注意,标准的ps命令在Android的adb shell中可能不直接支持-T选项,这通常与Linux中的ps命令略有不同),你可能是想…...

leetcode77组合——经典回溯算法
本文主要讲解组合的要点与细节,以及回溯算法的解题步骤,按照步骤思考更方便理解 c和java代码如下,末尾 给定两个整数 n 和 k,返回范围 [1, n] 中所有可能的 k 个数的组合。 你可以按 任何顺序 返回答案。 具体要点: …...

App无辜躺枪?手把手教你搞定腾讯手机管家误报导致的应用商店下架
当合规应用遭遇误报下架:开发者系统性应对指南运动健康类应用被标记为金融诈骗软件?社交工具因"病毒风险"被各大商店紧急下架?这类看似荒谬的误报事件,正在成为中小开发团队的"无妄之灾"。某知名运动App开发团…...
)
ThinkPad开机报错0183/0253?别慌,手把手教你搞定EFI变量错误(附BIOS重置教程)
ThinkPad开机报错0183/0253?EFI变量错误全面解决方案当你按下ThinkPad的电源键,期待熟悉的开机画面时,屏幕上却突然跳出一串神秘代码——"0183: Bad CRC of Security Settings in EFI Variable"或"0253: EFI Variable Block D…...

Python基础语法:常用内置函数
round():四舍五入 # 省略 ndigits print(round(3.14)) # 输出 3(int) print(round(3.66)) # 输出 4# 指定 ndigits print(round(3.14159, 2)) # 输出 3.14(float) print(round(3.666, 2)) # 输出 3.67# …...

Simulink中Repeating Sequence锯齿波显示恒为0解决方案
锯齿波设置如图1时,其示波器显示恒为0(如图2)。图1图2于是新建模型,只添加Repeating Sequence模块,采用原始设置发现可以正常输出锯齿波,于是调整时间参数,发现当时间设置为≥[0 0.06]时可以正常…...
)
Allegro PCB设计小技巧:如何让Route Keepout区域既能走线又能打过孔(附详细步骤图)
Allegro PCB设计实战:Route Keepout区域的灵活控制技巧 在高速PCB设计中,Route Keepout区域的管理常常让工程师陷入两难境地——元件封装自带的限制区域与实际布线需求产生冲突。特别是处理PCIE等高速信号时,这种矛盾尤为突出。传统做法要么完…...

淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理
淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taoji…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...

【DeepSeek集成测试黄金标准】:20年专家亲授5大避坑指南与自动化落地框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试黄金标准的演进与核心价值 集成测试在大语言模型工程化落地过程中已从“验证功能可用”跃迁为“保障推理一致性、上下文鲁棒性与安全边界的三位一体质量门禁”。DeepSeek系列模型&…...

GEO优化可以覆盖哪些搜索平台
这是一个非常现实的问题。企业投放资源做GEO,当然希望覆盖面越广越好。那么GEO优化到底能覆盖哪些平台?覆盖到什么程度?不同平台的GEO逻辑有什么差异?GEO平台覆盖的三个层级第一层级:通用大模型AI平台(核心…...

圈复杂度>12=技术债炸弹?DeepSeek静态分析实战:从17.8→3.2的重构路径全披露
更多请点击: https://codechina.net 第一章:圈复杂度>12技术债炸弹?DeepSeek静态分析实战:从17.8→3.2的重构路径全披露 当函数圈复杂度(Cyclomatic Complexity)持续高于12,它不再是…...