STM32入门笔记(03):STM32F103C8T6定时器的输入捕获模式和编码器模式(SPL库函数版)
目录
- 1.定时器的输入捕获模式
- 定时器输入捕获实验
- 代码实现
- 程序说明
- 实现思路
- 实现效果
- 知识要点
- 2.定时器的编码器模式
- 定时器编码器实验
- 代码实现
- 实验思路
- 知识要点
- 参考资料
先导知识
- [1] STM32入门笔记(02):定时器之定时器中断、输入捕获和PWM输出(SPL库函数版)
1.定时器的输入捕获模式
本实验以 STM32F103C8T6 捕获 PB0(TIM3_CH3)引脚 高电平时间长度为例讲解定时器输入捕获。
按键一端接 PB0引脚,按键另一端接 3.3V 引脚,按键按下时 PB0引脚就会接通高电平。
定时器输入捕获实验
代码实现
TIMER.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
#include "stm32f10x_tim.h"void TIM3_Cap_Init(u16 arr,u16 psc);#endifTIMER.c
#include "TIMER.h"
#include "usart.h"//定时器3通道3输入捕获配置初始化函数
void TIM3_Cap_Init(u16 arr,u16 psc)
{ //定义相关结构体GPIO_InitTypeDef GPIO_InitStructure; //定义一个GPIO初始化的结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义一个定时器初始化的结构体TIM_ICInitTypeDef TIM3_ICInitStructure; //定义一个定时器捕获输入初始化的结构体NVIC_InitTypeDef NVIC_InitStructure; //定义一个中断优先级初始化的结构体//使能相关时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟//初始化 GPIOB0GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PB0 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //下拉输入,默认低电平,可以被外部电压拉高为高电平GPIO_Init(GPIOB, &GPIO_InitStructure); //根据GPIO_InitStructure的参数初始化GPIOB0GPIO_ResetBits(GPIOB,GPIO_Pin_0); //初始化PB0为低电平//初始化定时器TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct的参数初始化定时器TIM3//初始化TIM3输入捕获参数TIM3_ICInitStructure.TIM_Channel = TIM_Channel_3; //输入捕获通道3TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI3上TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频为不分频,分频决定几个捕获事件触发中断服务函数TIM3_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器为不滤波TIM_ICInit(TIM3, &TIM3_ICInitStructure); //根TIM3_ICInitStructure参数初始化定时器TIM3输入捕获//中断分组初始化NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //先占优先级3级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //中断使能NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器TIM_ITConfig(TIM3,TIM_IT_Update|TIM_IT_CC3,ENABLE);//允许TIM3更新中断|允许TIM3通道3捕获中断 TIM_Cmd(TIM3, ENABLE ); //使能定时器2
}u8 falling_flag=0; //下降沿捕获标志
u16 TIM3CH3_CAPTURE_VAL; //输入捕获计数值//定时器3中断服务程序
void TIM3_IRQHandler(void)
{ if(TIM_GetITStatus(TIM3, TIM_IT_CC3)&&falling_flag==0) //发生捕获事件&&捕获事件为上升沿(按键按下,B0接通高电平){ TIM_OC3PolarityConfig(TIM3,TIM_ICPolarity_Falling); //设置为下降沿捕获falling_flag=1; //更新标志TIM_SetCounter(TIM3,0); //清除计数 //TIM3->CNT=0; //清除计数} else if(TIM_GetITStatus(TIM3, TIM_IT_CC3)&&falling_flag==1) //发生捕获事件&&捕获事件为下降沿{ TIM3CH3_CAPTURE_VAL=TIM_GetCapture3(TIM3)/10; //统计上升沿事件后的高电平持续时间(按键长按时间),//计数器频率p=主频时钟(72M)/预分频系数(psc)=72*10^6/7200=10Khz,即0.0001s=0.1ms一次计数//计数值超过arr(本程序设置为65535)将重新计数printf("TIM3CH3_CAPTURE_VAL:%d ms\r\n",TIM3CH3_CAPTURE_VAL); //向串口调试助手发送统计时间,注意时间上限为6.5535秒,超过6.5535秒会重新计数TIM_OC3PolarityConfig(TIM3,TIM_ICPolarity_Rising); //设置为上升沿捕获falling_flag=0; //更新标志TIM_SetCounter(TIM3,0); //清除计数 //TIM3->CNT=0; //清除计数 }TIM_ClearITPendingBit(TIM3, TIM_IT_CC3|TIM_IT_Update);//每次进入中断都要清空中断标志,否则主函数将无法正常执行
}main.c
#include "TIMER.h"
#include "usart.h"
#include "delay.h"int main(void)
{
// static u32 i = 0;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2TIM3_Cap_Init(0xffff,7200); //定时器计数上限为0xffff,计数频率为72M/7200uart_init(9600);while(1){
// //本次例程无主函数,用户可自定义
// i++;
// delay_ms(200);}
}程序说明
实现思路
- 编写定时器输入捕获初始化函数。
初始化 GPIO、定时器时钟→初始化 GPIO 引脚→初始化定时器→初始化定时器输入捕获→初始化中断分组→使能定时中断、输入捕获中断→使能定时器。
-
编写定时器中断服务函数。
按键按下产生上升沿,激活定时器输入捕获中断,进入中断服务函数,定时器重新计数,设置为下降沿捕获;
按键松开产生下降沿,进入中断服务函数,读取计数值,设置为上升沿捕获。 -
在主函数中定义相关初始化函数。
实现效果
- 工具 USB - TTL
- STM32F103C6T6 通过USB - TTL与串口监视助手通信,接线如下:
| USB - TTL | STM32F103C6T6 |
|---|---|
| RX | TX(PA9) |
| TX | RX(PA10) |

本实验以 STM32F103C8T6 捕获 PB0(TIM3_CH3)引脚 高电平时间长度为例讲解定时器输入捕获。
按键一端接 PB0引脚,按键另一端接 3.3V 引脚,按键按下时 PB0引脚就会接通高电平。
知识要点
1.定时器输入捕获参数的初始化:选择输入捕获通道 3→选择捕获模式→选择映射方式→配置预分频→配置滤波。
2.重新设置捕获模式函数、获取计数值函数和清除计数值函数的使用。
2.定时器的编码器模式
在 STM32F103C8T6 中,编码器使用的是定时器接口,定时器 1,2,3,4 有编码器的功能。同时只有 CH1 和 CH2可以进行编码器模式。
本实验以 B6(TIM4CH1)、B7(TIM4CH2为例。



定时器编码器实验
代码实现
ENCODER.c
#include "ENCODER.h"/*TIM4初始化为编码器接口*/
void Encoder_Init_TIM4(u16 arr,u16 psc)
{GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义一个定时器初始化的结构体TIM_ICInitTypeDef TIM_ICInitStructure; //定义一个定时器编码器模式初始化的结构体// 使能 GPIO、定时器时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能CPIOB时钟//初始化 GPIO引脚// B6(TIM4CH1) B7(TIM4CH2)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //PB6、PB7GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOB, &GPIO_InitStructure); //根据GPIO_InitStructure的参数初始化GPIOB0//初始化定时器TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值TIM_TimeBaseStructure.TIM_Prescaler = psc; // 预分频器 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct的参数初始化定时器TIM4//初始化定时器编码器TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3:CH1、CH2同时计数,四分频TIM_ICStructInit(&TIM_ICInitStructure); //把TIM_ICInitStruct 中的每一个参数按缺省值填入TIM_ICInitStructure.TIM_ICFilter = 10; //设置滤波器长度TIM_ICInit(TIM4, &TIM_ICInitStructure); //根TIM_ICInitStructure参数初始化定时器TIM4编码器模式//使能定时器TIM_Cmd(TIM4, ENABLE); //使能定时器4
}//读取编码器计数
int Read_Encoder_TIM4(void)
{int Encoder_TIM;Encoder_TIM=TIM4->CNT; //读取计数if(Encoder_TIM>0xefff)Encoder_TIM=Encoder_TIM-0xffff; //转化计数值为有方向的值,大于0正转,小于0反转。//TIM4->CNT范围为0-0xffff,初值为0。TIM4->CNT=0; //读取完后计数清零return Encoder_TIM; //返回值
}ENCODER.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
#include "stm32f10x_tim.h"void Encoder_Init_TIM4(u16 arr,u16 psc);
int Read_Encoder_TIM4(void);#endifmai.c
#include "ENCODER.h"
#include "usart.h"
#include "delay.h"int main(void)
{delay_init();uart_init(9600);Encoder_Init_TIM4(0xffff,0);while(1){ delay_ms(200); //每隔200ms读取一次编码器计数,即速度。//可以使用定时中断实现更精准的速度计算,用户可自定义printf("Encoder=%d\r\n", Read_Encoder_TIM4());}
}实验思路
-
编写编码器初始化函数。
使能 GPIO、定时器时钟→初始化 GPIO(两个)引脚→初始化定时器→初始化定时器编码器→使能定时器。 -
编写读取编码器计数值函数。
读取编码器计数并判断方向正反,读取完后将计数值清零。 -
编写主函数。
调用相关初始化函数,在 while 循环中以一定周期读取并向串口调试助手发送编码器计数值(即电机速度),每次读取编码器计数会在读取函数中将编码器计数清零。 -
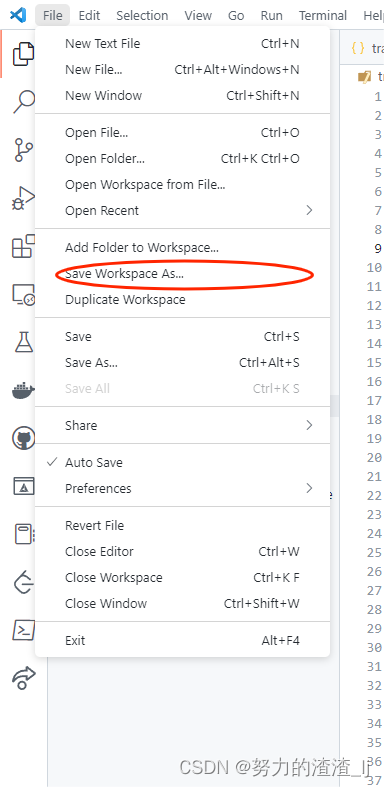
打开串口调试助手,调波特率为 9600 (
uart_init(9600);),对应主程序的函数调用打开串口。
STM32F103的编码器模式读取不了计数是怎么回事?
知识要点
- 定时器编码器模式的初始化:选择编码器模式→编码器模式结构体默认初始化→设置滤波器长度→初始化。
- 编码器计数的读取与置 0。
参考资料
- [1] STM32F103C8T6系统板学习资料

相关文章:
STM32入门笔记(03):STM32F103C8T6定时器的输入捕获模式和编码器模式(SPL库函数版)
目录1.定时器的输入捕获模式定时器输入捕获实验代码实现程序说明实现思路实现效果知识要点2.定时器的编码器模式定时器编码器实验代码实现实验思路知识要点参考资料先导知识 [1] STM32入门笔记(02):定时器之定时器中断、输入捕获和PWM输出(SPL库函数版)…...
《网络安全》零基础教程-适合小白科普
《网络安全》零基础教程 目录 目录 《网络安全》零基础教程 第1章 网络安全基础 什么是网络安全 常见的网络安全威胁 网络安全的三个基本要素 网络安全的保障措施 第2章 网络攻击类型 病毒、蠕虫、木马、后门 DoS、DDoS攻击 SQL注入、XSS攻击 …...

微信小程序语言与web开发语言的区别
WXML与HTML的区别def:WXML是小程序框架设计的一套标签语言,用来构建小程序页面的结构,作用类似于web开发中的HTML区别:标签名称的不同如HTML中的div,span,img,a分别对应wxml中的view,…...
【2022-09-14】米哈游秋招笔试三道编程题
第一题:最短子串 题目描述 米小游拿到了一个字符串,她想截取一个连续子串,使得该子串中包含至少k个连续的“mihoyo”。 你可以帮米小游求出最短的子串长度,以及对应的子串位置吗? 输入描述 第一行输入两个正整数n…...

云监控能力介绍
传统监控介绍 监控系统必要性 监控系统的能力清单 市面上常见商业及开源监控工具集 传统监控体系的不足 云监控介绍 云监控(CloudMonitor)是一项针对云资源和互联网应用进行监控的服务。 云监控为云上用户提供开箱即用的企业级开放型一站式监控解决方…...

HTML 文档类型
<!DOCTYPE> 声明帮助浏览器正确地显示网页。 <!DOCTYPE> 声明 Web 世界中存在许多不同的文档。只有了解文档的类型,浏览器才能正确地显示文档。 HTML 也有多个不同的版本,只有完全明白页面中使用的确切 HTML 版本,浏览器才能完…...
【UML】软件设计说明书 (完结)
目录一. 🦁 前言1.1 编写目的1.2 背景1.3 定义1.4 参考资料二. 🦁 总体设计2.1需求规定2.1.1 系统描述2.1.2 系统用例图2.2 运行环境2.2.1 设备2.2.2 支持软件2.2.3 接口2.2.4 控制2.3 基本设计概念2.4 系统结构三. 🦁 用例分析与设计3.1 用户…...
MATLAB——FFT(快速傅里叶变换)
基础知识 FFT即快速傅里叶变换,利用周期性和可约性,减少了DFT的运算量。常见的有按时间抽取的基2算法(DIT-FFT)按频率抽取的基2算法(DIF-FFT)。 1.利用自带函数fft进行快速傅里叶变换 若已知序列x[4,3,2,6…...

力扣-进店却未进行过交易的顾客
大家好,我是空空star,本篇带大家了解一道简单的力扣sql练习题。 文章目录前言一、题目:1581. 进店却未进行过交易的顾客二、解题1.正确示范①提交SQL运行结果2.正确示范②提交SQL运行结果3.正确示范③提交SQL运行结果4.正确示范④提交SQL运行…...
一文解决vscode中借助CMake配置使用Opencv过程中的所有问题
vscode中借助CMake配置使用opencv过程中的问题 vscode编译工程的完整过程 编写好CMakeLists.txtvscode中 ctrlshiftp 选择cmake configurevscode中 ctrlshiftp 选择cmake build CMake问题 1. set OpenCV_FOUND to FALSE so package “OpenCV” is considered to be NOT FOU…...

Golang每日一练(leetDay0004)
10. 正则表达式匹配 Regular Expression Matching 给你一个字符串 s 和一个字符规律 p,请你来实现一个支持 . 和 * 的正则表达式匹配。 . 匹配任意单个字符* 匹配零个或多个前面的那一个元素 所谓匹配,是要涵盖 整个 字符串 s的,而不是部分…...

手机忘记密码解锁的 6 大软件方法
您可能想要解锁手机的原因有很多。也许您正在海外旅行并想使用当地的 SIM 卡,或者您可能刚买了一部二手手机并且需要删除之前所有者的个人数据。您可能想知道如何获得可以免费解锁任何手机的软件。Android 用户可以使用他们的指纹、面部识别或 PIN。您也可以通过快速…...

MySQL数据库的基础语法总结(1)
MySql一.数据库,数据表的基本操作1.数据库的基本操作2. 数据表的基本操作2.1 数据库的数据类型2.1.1 整数类型2.1.2 浮点数类型和定点数类型2.1.3 字符串类型2.1.4 日期与时间类型2.2 数据表的基本操作2.2.1 创建一个数据表2.2.2 查看数据表2.2.3 查看表的基本信息的MySQL指令2…...

Linux之进程创建
本节目录1.fork函数初识2.fork函数返回值3.写时拷贝1.fork函数初识 在Linux中,fork函数是一个非常重要的函数,它从已存在的进程中创建一个新进程。新进程叫做子进程,而原进程叫做父进程。 #include <unistd.h> pid_t fork(void); 返回…...
DCL 管理用户与权限控制
目录 DCL 查询用户 案例 权限控制 案例 DCL DCL英文全称是Data Control Language(数据控制语言),用来管理数据库用户、控制数据库的访问权限。 查询用户 1、查询用户 select * from mysql.user; 2、创建用户 CREATE USER 用户名主机名 IDENTIFIED BY 密码;…...
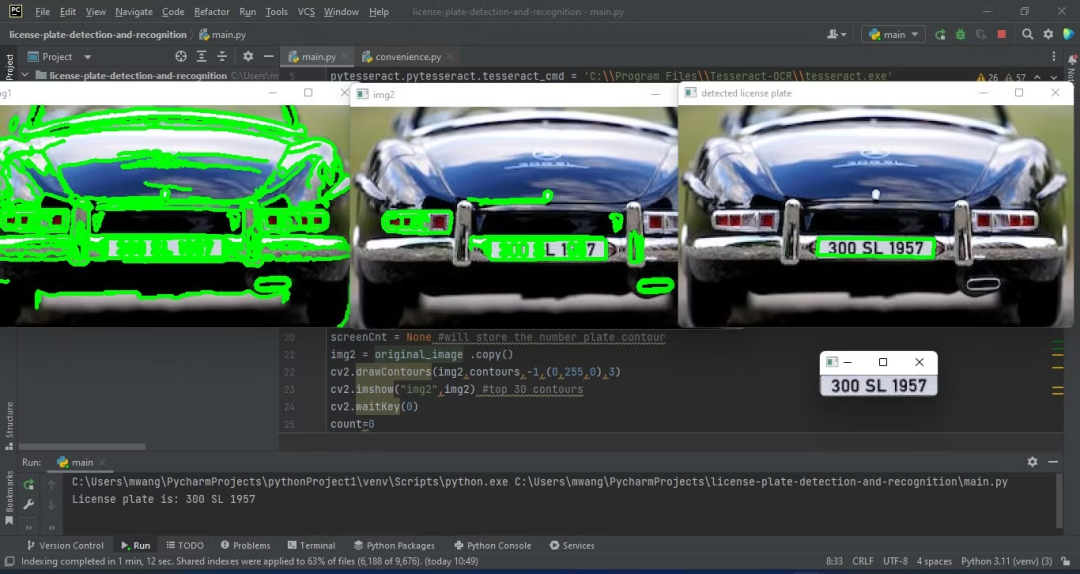
如何使用 Python 检测和识别车牌(附 Python 代码)
文章目录创建Python环境如何在您的计算机上安装Tesseract OCR?技术提升磨砺您的Python技能车牌检测与识别技术用途广泛,可以用于道路系统、无票停车场、车辆门禁等。这项技术结合了计算机视觉和人工智能。 本文将使用Python创建一个车牌检测和识别程序。…...

[Python题解] CodeForces 1804 D. Accommodation
✅作者简介:人工智能专业本科在读,喜欢计算机与编程,写博客记录自己的学习历程。 🍎个人主页:小嗷犬的个人主页 🍊个人网站:小嗷犬的技术小站 🥭个人信条:为天地立心&…...

【设计模式】访问者模式
访问者模式 访问者模式被称为是最复杂的设计模式,比较难理解并且使用频率不高。 在 GoF 的《设计模式》⼀书中,访问者者模式(Visitor Design Pattern)是这么定义的: Allows for one or more operation to be applied to a set o…...

蓝桥杯刷题冲刺 | 倒计时27天
作者:指针不指南吗 专栏:蓝桥杯倒计时冲刺 🐾马上就要蓝桥杯了,最后的这几天尤为重要,不可懈怠哦🐾 文章目录1.递增序列2.等差素数列3.七段码4.亲戚5.连通块中点的数量1.递增序列 题目 链接:&am…...

RV1126_python人脸识别Retinaface+MobilefaceNet
RV1126_python人脸识别Retinaface+MobilefaceNet RV1126 具备RKNN 模块支持大部分如Pytorch、MXNet、Caffe、tensorflow、keras、onnx等常见框架,而且量化部署使用RKNN-toolkit非常方便。以下介绍通过RV1126实现的人脸识别过程。 首先人脸识别需要先做人脸检测>>人脸校正…...

ROS2机械臂实战:ros2_control、MoveIt2与move_group核心问题排查指南
1. ROS2机械臂控制栈的核心组件解析 搞ROS2机械臂开发的朋友应该都熟悉这个经典组合:ros2_control负责硬件接口,MoveIt2处理运动规划,move_group作为执行层。这三个组件就像机械臂控制的"三驾马车",任何一个环节出问题都…...

显卡接口大乱斗:VGA、DVI、HDMI、DP到底怎么选?附2023年显示器搭配指南
显卡接口终极指南:VGA、DVI、HDMI、DP的2023年实战选择策略 当你面对显示器背面那一排形状各异的接口时,是否曾感到无从下手?VGA的蓝色老将、DVI的白色宽口、HDMI的扁平设计、DP的直角造型——这些看似简单的接口背后,藏着影响画面…...

这份榜单够用!AI论文网站深度测评与推荐
2026年真正好用的AI论文网站,核心看生成的论文质量、低AI味、格式正确、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 一、…...

PP-DocLayoutV3完整指南:支持弯曲/倾斜文档的布局分析实战
PP-DocLayoutV3完整指南:支持弯曲/倾斜文档的布局分析实战 1. 引言:告别平面文档的限制 想象一下这样的场景:你手头有一份古老的卷轴文献,或者一张被折叠多次的纸质文档,甚至是一本装订厚重的书籍内页。这些文档往往…...

从零到一:构建你的第一个智能体应用实战指南
1. 为什么你需要一个智能体应用? 想象一下这样的场景:每天早上你的手机自动整理当天的重要会议和待办事项,根据你的日程推荐最佳出行路线;工作时自动汇总行业动态和关键邮件;晚上回家前提前打开空调并推荐符合你口味的…...

汉字拼音转换工具选型与实战指南:用pinyinjs解决多场景字符处理难题
汉字拼音转换工具选型与实战指南:用pinyinjs解决多场景字符处理难题 【免费下载链接】pinyinjs 一个实现汉字与拼音互转的小巧web工具库,演示地址: 项目地址: https://gitcode.com/gh_mirrors/pi/pinyinjs 在数字化产品开发中…...
))
GESP5级C++考试语法知识(十一、递归算法(一))
🌟 第一章:什么是递归?(“套娃小精灵”的故事)1、🎯 想象一个魔法世界:有一个小精灵,它不会做复杂的事情,但它有一个绝招:👉 遇到问题,…...

树莓派4B接口全解析:从HDMI到GPIO,新手必看的使用指南
树莓派4B接口全解析:从HDMI到GPIO的实战指南 第一次拿到树莓派4B时,那块巴掌大的电路板上密密麻麻的接口总让人望而生畏——哪个口接显示器?哪些针脚能控制LED?电源到底要多少伏?这些问题困扰过每个初学者。作为全球最…...
)
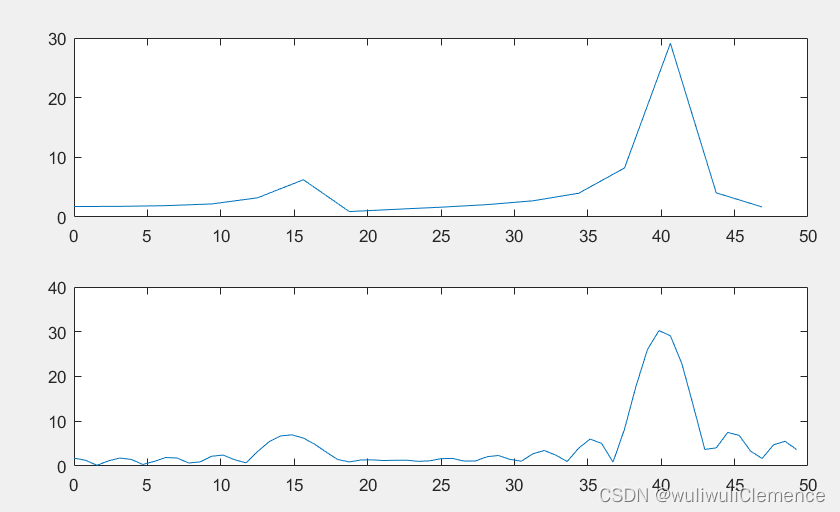
故障诊断指南:用STFT在5分钟内定位工业设备异常时间点(MATLAB版)
故障诊断实战:STFT在工业设备异常定位中的高效应用(MATLAB实现) 工业设备的异常检测如同医生听诊,需要精准捕捉故障的"心跳节律"。传统方法往往只能告诉我们"设备病了",却难以定位"何时发病…...

基于Spring AI与Alibaba的智能客服系统:架构设计与实战避坑指南
传统客服系统,尤其是那些基于硬编码规则引擎的,相信很多开发者都维护过。这类系统通常有几个让人头疼的“老大难”问题:用户稍微换个说法,机器人就“听不懂”了,意图识别率低得可怜;业务高峰期,…...