永磁同步电机控制算法--基于 SVM 的无磁链环 DTC
永磁同步电机无磁链环 DTC 通过控制定子磁链交轴分量来直接控制转矩,不再要求控制磁链幅值恒定,省去了传统 DTC 中的磁链环,不仅转矩响应更快,有效抑制了转矩脉动,而且提高了电机功率因数。但无磁链环 DTC 方案仍采用传统 DTC方案中的 Bang-Bang 控制策略,保留了 Bang-Bang 控制精度不高的缺点,此外,其定子磁链限幅策略要求在两套电压矢量选择表之间频繁切换,而两套电压矢量选择表的扇区分别依据转子和定子磁链位置划分,在运行过程中要同时对两个磁链的位置进行检测,系统复杂性相比传统 DTC 更高,存在改善的空间。
一、原理介绍

永磁同步电机相量图
dq轴定子磁链电流模型公式为

定子磁链幅值为

转矩表达式

由转矩表达式可求得转矩角

由上个文章可知,隐极式正弦波永磁同步电动机的转矩只与定子磁链的交轴分量有关,转矩变化则由定子电压直轴分量控制。在无磁链环DTC中,在负载转矩不变时,电机定子磁链的交轴分量也不变。而由dq轴定子磁链电流模型公式可知,定子磁链的交轴分量只与定子电流交轴分量有关,所以在相同转矩要求下,定子电流交轴分量也是不变的。这样一来定子磁链幅值就只与定子电流直轴分量有关了,在 DTC 系统正常运行时,定子磁链幅值与定子电流直轴分量成正比。
基础部分铺垫完成,接下来介绍如何推导出合适的参考电压矢量。
在直接转矩控制与空间矢量调制的结合过程中,求出一个合适的参考电压矢量是最关键的一环,在无磁链环永磁同步电机 DTC 中,这个参考矢量需要满足几个要求:
1) 能精确地补偿转矩误差,使转能准确跟踪给定值。因为无磁链环 DTC 相比传统 DTC 的优点就在于能更准确地控制转矩,因此转矩控制精度是设计参考矢量时首
先要考虑的问题。
2) 确保电机安全运行,定子磁链的幅值要限制在额定值之内。
3)应尽量减小定子磁链幅值与无功励磁电流,提高电机的功率因数。
传统的 SVM-DTC 中定子磁链幅值是恒定的,只需计算出满足转矩要求需要的转矩角变化量即可求出参考电压矢量,无磁链环 DTC 并不要求保持磁链幅值恒定,之前的方法并不适用。在无磁链环 DTC 理论中,转矩的变化由所施加电压矢量的交轴分量决定,从优先满足转矩要求的角度来说,参考电压矢量的交轴分量可以直接确定。

电压矢量直轴分量的作用则是控制磁链幅值,当交轴分量作用导致磁链幅值超出额定值时,直轴分量要作用在相反方向上,把定子磁链控制在额定值内。

综上所述,参考电压矢量为

结合空间矢量调制的 PMSM 无磁链环 DTC 系统框图如图所示, 转速误差经过 PI 控制器得到给定转矩,转矩误差经过限幅之后得到单周期内期望转矩变化量,根据参考电压矢量公式即可求出参考电压矢量,最终由空间矢量调制模块合成目标电压矢量作用于逆变器实现对电机的控制。

基于空间矢量调制的 PMSM 无磁链环 DTC 结构框图
二、仿真模型
在MATLAB/simulink(软件版本为2024A)里面验证所提算法。采用和实验中一致的控制周期1e-4,电机部分计算周期为5e-7。仿真模型如下所示:

2.1给定转速与实际转速

转速稳定,并准确跟踪给定转速值
2.2实际电磁转矩

转矩明显平滑度更好,并且响应速度较快
2.3给定定子磁链与实际定子磁链

磁链基本控制在了限制值附近。
总结:与传统无磁链环 DTC 方法相比,基于空间矢量调制的无磁链环直接转矩控制方法定子磁链幅值自适应变化效果更好,磁链幅值进一步降低,提高了电机的功率因数,并且在保持 DTC 动态响应快有点的同时,有效降低了转矩脉动。
相关文章:
永磁同步电机控制算法--基于 SVM 的无磁链环 DTC
永磁同步电机无磁链环 DTC 通过控制定子磁链交轴分量来直接控制转矩,不再要求控制磁链幅值恒定,省去了传统 DTC 中的磁链环,不仅转矩响应更快,有效抑制了转矩脉动,而且提高了电机功率因数。但无磁链环 DTC 方案仍采用传…...

如何避免在 Docker 容器中遇到 MAC 地址冲突和 IP 地址冲突的问题
在 Docker 容器中遇到 MAC 地址冲突和 IP 地址冲突的问题时,通常是由于 Docker 在分配网络资源时出现了一些问题。虽然这种情况并不常见,但仍有可能发生。以下是一些原因和可能的解决方案: 原因分析 Docker 版本问题:某些 Docke…...

arm64架构下源码编译安装kafka —— 筑梦之路
一般来说,直接使用官方提供的二进制文件即可,没有必要使用源码编译安装的方式,而对于有特殊用途的,选择源码编译安装无疑是更好地选择。比如修改源码实现想要的功能,mirrormaker2保持topic名称不变。 git clone https…...
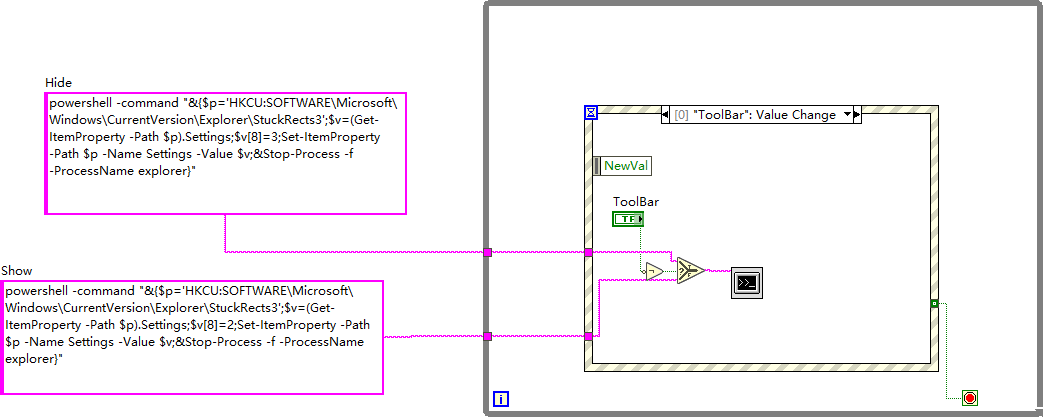
LabVIEW前面板占满整个屏幕(转)
希望在运行一个LabVIEW程序时,它的前面板能够占据整个屏幕,且不显示Windows的任务栏或其他任何的LabVIEW菜单选项。怎样才能实现这一功能? 您可以通过手动配置或编程的方式实现该功能。 手动配置VI属性 您可以通过以下操作,将…...

Promise.all、any、race和allSettled的相同点与不同点与应用场景
在JavaScript中,Promise对象是一种处理异步操作的方式。它允许我们以一种更优雅的方式来处理异步代码,而不是使用回调函数。在Promise中,有一些方法可以帮助我们更好地管理多个Promise实例,这些方法包括Promise.all、Promise.any、…...

Ubuntu下如何设置程序include搜索路径及链接路径
添加库的include及lib路径 linux下系统默认路径为 /usr/include, /usr/local/include, gcc在编译程序时会按照当前目录路径->系统默认路径->系统环境变量的路径方式去查找,所以当我们想调用的库未安装在系统默认路径时,我们可以通过手动添加环境变…...

FLinkCDC引起的生产事故(二)
背景: 最近在做实时数据的抽取工作,利用FLinkCDC实时抽取目标库Oracle的数据到Doris中,但是在抽取的过程中,会导致目标库的生产库数据库非常卡顿,为了避免对生产环境的数据库造成影响,对生产环境的数据库利…...

【产品经理】WMS多仓调拨转移说明
对于仓储管理来说,越来越多企业开始应用WMS进行系统化的管理,以提升仓库的作业效率。本文作者从业务流程和基础功能两个方面展开介绍,希望对你有帮助。 一、业务流程 。在线下业务流程拓展,仓库不断增多的过程中,由于…...

每日一练:奇怪的TTL字段(python实现图片操作实战)
打开图片,只有四种数字:127,191,63,255 最大数字为255,想到进制转换 将其均转换为二进制: 发现只有前2位不一样 想着把每个数的前俩位提取出来,组成新的二进制,然后每…...

【Java开发实训】day03——方法的注意事项
目录 一、方法的基本概念 二、void和return关键字 三、单一返回点原则 四、static方法使用说明 🌈嗨!我是Filotimo__🌈。很高兴与大家相识,希望我的博客能对你有所帮助。 💡本文由Filotimo__✍️原创,首发于…...

HarmonyOS NEXT:一次开发,多端部署
寄语 这几年特别火的uni-app实现了“一次开发,多端使用”,它这个端指的是ios、安卓、各种小程序这些,而HarmonyOS NEXT也提出了“一次开发,多端部署”,而它这个端指的是终端设备,也就是我们的手机、平板、电…...
)
Bilibili Android一二面凉经(2024)
BiliBili Android一二面凉经(2024) 笔者作为一名双非二本毕业7年老Android, 最近面试了不少公司, 目前已告一段落, 整理一下各家的面试问题, 打算陆续发布出来, 供有缘人参考。今天给大家带来的是《BiliBili Android一二面凉经(2024)》。 面试职位: 高级Android开发工程师&…...

数据库内核研发学习之路(一)
已经上了几天班了,开始做一些总结性的工作。 数据库内核研发首当其中的便是环境配置,今天先介绍一下虚拟机之类的环境搭建,在之前已经写过一篇关于VMware搭建虚拟机的博客了,有兴趣可以去看看,这里我再总结一下使用Vi…...

LSTM:深度学习中的时间序列处理大师
LSTM:深度学习中的时间序列处理大师 引言 在深度学习领域,处理时间序列数据是一项极具挑战性的任务。时间序列数据广泛存在于金融、医疗、气象、自然语言处理等多个领域,这些数据不仅具有时间依赖性,还常常伴随着复杂的长期依赖…...

T113-i系统启动速度优化方案
背景: 硬件:T113-i + emmc 软件:uboot2018 + linux5.4 + QT应用 分支:longan 问题: 全志T113-i的官方系统软件编译出的固件,开机启动时间10多秒,启动时间太长,远远超过行业内linux系统的开机速度,需要进一步优化。 T113-i 优化后启动速度实测数据 启动阶段启动时间(…...

ArcGis将同一图层的多个面要素合并为一个面要素
这里写自定义目录标题 1.加载面要素的shp数据 2.点击菜单栏的地理处理–融合,如下所示: 3.将shp面要素输入,并设置输出,点击确定即可合并。合并后的属性表就只有一个数据了。...
微软Win11 24H2七月更新补丁KB5040435发布!附下载
系统之家于7月10日发出最新报道,微软为Win11用户发布了24H2版本七月的最新更新补丁KB5040435。用户升级系统后,会发现版本号升至 26100.1150。此次更新针对远程身份验证拨入用户服务(RADIUS)协议与 MD5冲突等问题进行修复。接下来跟随小编看看此次更新的…...

iOS 开发中不常见的专业术语
乐此不疲地把简单的问题复杂化,并把这种XX行为叫作专业 APM 在 iOS 开发中,APM 代表 Application Performance Management(应用性能管理)。APM 是一套监控和管理应用程序性能的工具和技术,旨在确保应用程序运行平稳、…...

【中项第三版】系统集成项目管理工程师 | 第 4 章 信息系统架构④ | 4.7
前言 第4章对应的内容选择题和案例分析都会进行考查,这一章节属于技术相关的内容,学习要以教材为准。本章分值预计在4-5分。 目录 4.7 安全架构 4.7.1 安全威胁 4.7.2 定义与范围 4.7.3 整体架构设计 4.7.4 网络安全架构设计 4.7.5 数据库系统安…...

Time to say GoodBye
北湖的繁华 北湖的繁华 北湖的繁华 终究 终究 终究 还是不属于我了 还是不属于我了 还是不属于我了 永远铭记 6 月 26 日 永远铭记6月26日 永远铭记6月26日 在这天下午 , 一个眼镜男夺走了我的资格 在这天下午,一个眼镜男夺走了我的资格 在这天下午,一个眼镜男夺走了我的资格 永…...

01-大模型AI:大模型学习指南
大模型概述 一、大模型训练的三大核心阶段 预训练:自监督学习的“知识积累期” 预训练是大模型的“启蒙阶段”,采用自监督学习模式。模型像海绵一样从海量文本数据中自主学习语言规律、语义关联和世界知识。例如,训练一个AI领域大模型时,会输入数百万篇AI论文、技术博客…...

AI规范编程:从SDD理念到Spec-Kit落地实践
文章目录一、SDD 诞生的背景:AI 时代软件工程的范式变革2.1、传统开发范式的痛点2.2、SDD 的核心定义与价值2.3、SDD 的发展历程二、SDD 工具对比分析:Spec-Kit、OpenSpec 与 Superpowers2.1 核心定位与设计理念对比2.2 技术架构与功能特性对比2.3 选型建…...

WABT实战指南:用wasm-decompile精准逆向WebAssembly
1. 为什么你打开一个.wasm文件看到的全是乱码,而别人却能读出函数名和逻辑? WABT(WebAssembly Binary Toolkit)不是个“点开即用”的图形化工具,它是一套命令行驱动的底层解析引擎——这恰恰是它在逆向分析场景中不可…...

AI agent案例汇总:基于 LangGraph 的智能对话 Agent 实现
实现了一个具备记忆功能和工具调用能力的智能对话 Agent,基于 LangChain 框架构建,可实现天气查询、数学运算两大核心功能,同时支持多轮对话记忆。代码中初始化了大模型并配置相关参数,通过装饰器定义工具函数,让 Agen…...
)
Win7专业版电脑重启后时间服务总停止?三步设置让它稳定运行(附命令详解)
Win7时间服务异常终极修复指南:从原理到实战每次重启Win7电脑后,右下角的时间总是停留在过去?这可能是Windows时间服务(w32time)在捣鬼。作为系统核心组件之一,时间服务不仅影响时钟显示,更会干…...

Keil RTX5迁移调试问题与RTOS组件使用指南
1. 问题背景与现象分析最近在将项目从CMSIS-RTOS v1(Keil RTX v4.x)迁移到CMSIS-RTOS v2(Keil RTX v5.x)时,发现Vision调试器中的System and Thread Viewer窗口在调试会话中显示空白。这个现象让习惯了通过图形化界面监…...

LangGraph 状态存储优化:处理大规模多智能体数据的高效方案
LangGraph 状态存储优化:处理大规模多智能体数据的高效方案 本文面向有LangGraph开发经验、需要落地大规模多智能体应用的开发者,从底层原理、架构设计到代码实现全方位讲解如何将LangGraph状态存储的性能提升10倍、成本降低80%,支撑10万+级多智能体并发运行。 引言 痛点引…...

Gemini SQL生成准确率暴跌87%?揭秘模型幻觉的4个致命诱因及实时校验方案
更多请点击: https://intelliparadigm.com 第一章:Gemini SQL生成准确率暴跌87%?揭秘模型幻觉的4个致命诱因及实时校验方案 近期多项基准测试显示,Gemini Pro 1.5 在复杂业务场景下的SQL生成任务中,准确率从历史平均9…...

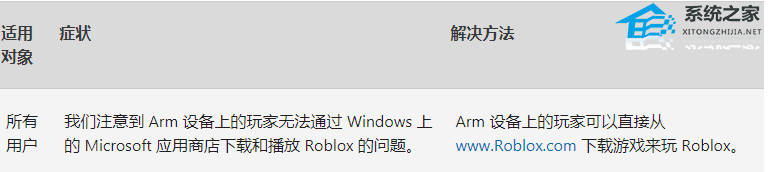
如何在Mac上免费运行Windows游戏与应用:Whisky完整指南
如何在Mac上免费运行Windows游戏与应用:Whisky完整指南 【免费下载链接】Whisky A modern Wine wrapper for macOS built with SwiftUI 项目地址: https://gitcode.com/gh_mirrors/wh/Whisky 还在为Mac无法运行Windows专属软件而烦恼吗?Whisky为你…...
在Windows 10上从零开始:手把手教你安装和运行TELEMAC-MASCARET V8P4水动力模型
在Windows 10上从零开始:手把手教你安装和运行TELEMAC-MASCARET V8P4水动力模型 对于初次接触水动力建模的研究者来说,TELEMAC-MASCARET这套开源工具既强大又令人望而生畏。记得我第一次在学术会议上看到同行展示的溃坝模拟动画时,那些流动的…...