自动驾驶三维车道线检测系列—OpenLane数据集介绍
文章目录
- 1. 背景介绍
- 2. OpenLane数据集详细描述
- 2.1 数据集特点
- 2.2 坐标系定义
- 3. 使用方法
- 4. 结论
1. 背景介绍
自动驾驶技术的发展日新月异,而3D车道感知是其核心之一。本文将深入介绍OpenLane数据集——迄今为止规模最大、最接近真实世界的3D车道数据集。我们将一起探索其背景、详细内容、坐标系定义以及如何有效利用这一宝贵资源,以推动自动驾驶技术的研究与发展。
自动驾驶技术正逐渐从梦想走向现实,而精确的车道识别是实现安全自动驾驶的关键。传统的2D车道数据集虽然在学术界和工业界得到了广泛应用,但它们往往无法满足3D车道感知的需求。为了填补这一空白,OpenLane数据集应运而生,为研究者提供了一个全新的平台。
参考paper:PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark

2. OpenLane数据集详细描述
OpenLane数据集以其真实性和规模著称。它收集了来自公共感知数据集的宝贵内容,涵盖了1000个路段的车道和最近路径对象(CIPO)注释。总体上,OpenLane包含了200K帧图像和超过880K条精心标注的车道信息。
2.1 数据集特点
- 真实世界场景:所有数据均来源于真实世界的驾驶场景,包括城市道路、高速公路等多样环境。
- 大规模覆盖:数据集规模空前,为研究者提供了丰富的样本进行模型训练和测试。
- 高精度标注:每一条车道都经过了细致的人工标注,确保了数据的准确性和可靠性。
- 多维度信息:除了车道线,还提供了CIPO等关键信息,为3D感知提供了更多维度的数据支持。
2.2 坐标系定义
OpenLane数据集采用相机坐标系(Camera Coordinate System)来定义车道的位置。所有标注均以精确的坐标点和相应的属性信息呈现,便于研究者进行空间分析和算法开发。坐标系参考:Three camera coord sys in eval code
详细解释如下:
Waymo(OpenLane)的相机坐标系定义为:X轴向前,Y轴向左,Z轴向上。
这与广泛使用的常规(标准)相机坐标系不同,在常规坐标系中:X轴向右,Y轴向下,Z轴向前。
3. 使用方法
OpenLane数据集的使用方法灵活多样,适用于不同类型的研究和应用开发:
- 数据预处理:根据研究需求对原始数据进行清洗和格式化,以适配特定的算法框架。
- 模型训练:使用标注的车道数据训练深度学习模型,进行车道检测和预测。
- 算法测试:在数据集上测试车道感知算法的性能,评估算法的准确性和鲁棒性。
- 可视化分析:利用数据可视化工具展示车道线和CIPO的分布,加深对场景的理解。
数据集下载参考:Download
数据集目录组织格式如下:
├── images
| ├── training
| | ├── segment-xxx
| | | ├── xxx.jpg
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.jpg
| | | └── ...
| | └── ...
| └── validation
| ├── segment-xxx
| | ├── xxx.jpg
| | └── ...
| ├── segment-xxx
| | ├── xxx.jpg
| | └── ...
| └── ...
├── cipo
| ├── training
| | ├── segment-xxx
| | | ├── xxx.jpg.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.jpg.json
| | | └── ...
| | └── ...
| └── validation
| ├── segment-xxx
| | ├── xxx.jpg.json
| | └── ...
| ├── segment-xxx
| | ├── xxx.jpg.json
| | └── ...
| └── ...
├── lane3d_300
| ├── training
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── validation
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| └── test
| ├── curve_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── extreme_weather_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── intersection_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── merge_split_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── night_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── up_down_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── curve.txt
| ├── extreme_weather.txt
| ├── intersection.txt
| ├── merge_split.txt
| ├── night.txt
| └── up_down.txt
├── lane3d_1000
| ├── training
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── validation
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| └── test
| ├── curve_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── extreme_weather_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── intersection_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── merge_split_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── night_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── up_down_case
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | ├── segment-xxx
| | | ├── xxx.json
| | | └── ...
| | └── ...
| ├── 1000_curve.txt
| ├── 1000_extreme_weather.txt
| ├── 1000_intersection.txt
| ├── 1000_merge_split.txt
| ├── 1000_night.txt
| └── 1000_up_down.txt
└── scene└── SCENE└── scene.json
通用规则说明:我们使用XXX来泛指图像、CIPO(最近路径对象)、lane3d_300和lane3d_1000。我们在XXX/training/和XXX/validation/下提供训练/验证数据集分割,这与Waymo原始的训练/验证分割保持一致。XXX/training/segment-xxx表示后续文件属于一个完整路段。
文件夹结构详解:
- images/: 此文件夹包含Waymo开放数据集中的所有前视原始图像文件。我们从原始的tfrecord格式中提取了它们。总共包含1000个路段,其中798个用于训练,202个用于验证。
- cipo/: 此文件夹包含所有CIPO注释。有关真实值JSON文件的详细信息,请参考CIPO注释文档。
- lane3d_1000/: 此文件夹包含所有2D/3D车道注释。除了训练/验证分割外,我们在lane3d_1000/test/下提供了几种场景案例。每个案例包含从验证集中选取的特定主题的路段。我们在lane3d_1000/test/1000_XXX.txt中提供了相应的图像名称。有关真实值JSON文件的详细信息,请参考车道注释文档。
- lane3d_300/: 此文件夹从lane3d_1000/中包含了一个小型数据集。我们为那些计算资源有限的用户提供此数据集。总共包含300个序列,其中240个用于训练,60个用于验证。
- scene/: 此文件夹包含所有场景注释。它只有一个JSON文件。有关JSON文件的详细信息,请参考CIPO注释文档。
更好的理解:
- 图像文件夹:存放了Waymo开放数据集中的1000个路段的前视图原始图像,分为798个训练路段和202个验证路段。
- CIPO注释:提供了CIPO(最近路径对象)的详细注释信息,具体细节见CIPO注释文档。
- 3D车道1000:提供了2D和3D车道的详细注释,包括训练/验证分割和特定场景测试案例,场景案例的细节和图像名称列表见对应文本文件。
- 3D车道300:为计算资源受限用户提供的小型数据集,包含240个训练序列和60个验证序列。
- 场景注释:包含场景的总体注释,详情见单一的JSON文件。
4. 结论
OpenLane数据集的发布,为自动驾驶领域的研究者提供了一个前所未有的研究资源。它不仅推动了3D车道感知技术的发展,也为整个自动驾驶技术的进步贡献了重要力量。我们期待研究社区能够利用这一数据集,开发出更加智能和安全的自动驾驶系统。

相关文章:
自动驾驶三维车道线检测系列—OpenLane数据集介绍
文章目录 1. 背景介绍2. OpenLane数据集详细描述2.1 数据集特点2.2 坐标系定义 3. 使用方法4. 结论 1. 背景介绍 自动驾驶技术的发展日新月异,而3D车道感知是其核心之一。本文将深入介绍OpenLane数据集——迄今为止规模最大、最接近真实世界的3D车道数据集。我们将…...

CMakeList学习笔记
设置项目:project project(planning VERSION 1.0.0 LANGUAGES CXX) # 项目的名字 版本 1.1.0 编程语言 CXX 设置包含目录:include_directories、targer_include_directories 设置编译类型:add_executable、add_library add_executable(demo d…...

将git默认的编辑器设置为vin
git默认编辑器现状 如下,很多linux发行版,未加修改的情况下,git的默认编辑器使用起来不太方便 Signed-off-by: root <rootxxx.COM># Please enter the commit message for your changes. Lines starting # with # will be ignored, a…...

ros2_control 6 自由度机械臂
系列文章目录 前言 ros2_control 是一个实时控制框架,专为普通机器人应用而设计。标准的 c 接口用于与硬件交互和查询用户定义的控制器命令。这些接口增强了代码的模块化和与机器人无关的设计。具体的应用细节,例如使用什么控制器、机器人有多少个关节以…...

Python 在自动化中的实际应用:用 Python 简化繁琐任务
文章目录 1、概述2、自动化文件和目录管理3.数据处理与分析4.网页爬虫5. 系统管理6。定时任务7.结语 1、概述 这篇文章将深入探讨Python在自动化中的实际应用,帮助您用Python简化繁琐任务。 我们将从多个方面入手,展示如何利用Python进行文件管理、数据…...
及其工作原理。描述如何使用 Spring Boot 快速搭建一个 RESTful Web服务?)
解释 Spring 框架的核心模块(如 IoC 容器、AOP )及其工作原理。描述如何使用 Spring Boot 快速搭建一个 RESTful Web服务?
Spring框架是一个广泛使用的Java企业级应用程序开发框架,它提供了一系列的模块来帮助开发者构建健壮、可测试、可维护的应用程序。 其中,最核心的模块包括IoC容器和AOP(Aspect Oriented Programming,面向切面编程)。 …...

数据分析详解
一、数据分析教程 1. 入门教程 在线课程:如Coursera、Udemy、网易云课堂等平台提供了大量数据分析的入门课程,涵盖统计学基础、Python/R语言编程、数据可视化等内容。书籍推荐:《Python数据分析实战》、《R语言实战》等书籍是数据分析入门的…...

SpringCloud之@FeignClient()注解的使用方式
FeignClient介绍 FeignClient 是 Spring Cloud 中用于声明一个 Feign 客户端的注解。由于SpringCloud采用分布式微服务架构,难免在各个子模块下存在模块方法互相调用的情况。比如订单服务要调用库存服务的方法,FeignClient()注解就是为了解决这个问题的…...

20.rabbitmq插件实现延迟队列
问题 前面谈到基于死信的延迟队列,存在的问题:如果第一个消息延时时间很长,而第二个消息延时时间很短,第二个消息并不会优先得到执行。 下载插件 地址:https://github.com/rabbitmq/rabbitmq-delayed-message-excha…...

TS如何处理js模块的类型?
现在很多插件都直接用ts开发了,本身包含了类型定义常见的第三方插件,都有’types/xxx’包,安装即可使用其他的,可通过declare module定义类型 比如: // someModule.js export function greet(name) {return Hello, $…...
GPS定位系统(VUE框架)
源码下载:小宅博客网 博主之前写的《GPS定位系统(MVC框架)》版本,并没有做到前后端分离,不太适合多人协作开发,这边博主分享一个基于asp.net web api vue3的GPS定位系统框架,本框架继承了MVC框…...

分布式光伏并网AM5SE-IS防孤岛保护装置介绍——安科瑞 叶西平
产品简介 功能: AM5SE-IS防孤岛保护装置主要适用于35kV、10kV及低压380V光伏发电、燃气发电等新能源并网供电系统。当发生孤岛现象时,可以快速切除并网点,使本站与电网侧快速脱离,保证整个电站和相关维护人员的生命安全。 应用…...

神奇的方法解决Navicat闪退
原因 打开Navicat操作上面的工具等就会闪退,原因竟然是屏幕划词!!! 解决方法 看别人提到有道词典的划词功能的原因 我没有安装有道词典,但我安装豆包,它也有划词翻译的功能,关闭即可...

openmv学习笔记(24电赛笔记)
感光元件 openmv采用小孔摄像模式,将图像映射到感光原件上面,来传递图片,通过图片快速的刷新行成视频,在IDE中通过对感光原件的编辑可以控制视频的效果。 重置感光元件到默认状态 import sensor #导入感光元件这个库sensor.res…...

Linux shell编程学习笔记67: tracepath命令 追踪数据包的路由信息
0 前言 网络信息是电脑网络信息安全检查中的一块重要内容,Linux和基于Linux的操作系统,提供了很多的网络命令,今天我们研究tracepath命令。 Tracepath 在大多数 Linux 发行版中都是可用的。如果在你的系统中没有预装,请根据你的…...

生鲜云订单零售系统小程序的设计
管理员账户功能包括:系统首页,个人中心,用户管理,商品分类管理,商品信息管理,订单评价管理,订单管理,系统管理 微信端账号功能包括:系统首页,商品信息&#…...

BLE自适应跳频算法详解
前言 (1)自适应跳频算法是相当的简单,小学生都能够看懂,而且网上已经有相当多的关于自适应跳频算法的介绍。既然如此,为什么我还要写这样一篇博客呢? (2)原因很简单,我发…...
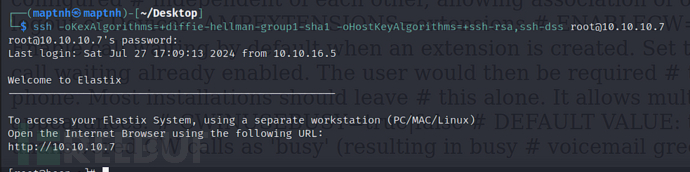
[Meachines] [Easy] Beep Elastix-CMS-LFI
信息收集 IP AddressOpening Ports10.10.10.7TCP:22, 25, 80, 110, 111, 143, 443, 993, 995, 3306 $ nmap -p- 10.10.10.7 --min-rate 1000 -sC -sV Nmap scan report for 10.10.10.7 (10.10.10.7) Host is up (0.53s latency). Not shown: 65486 filtered tcp ports (no-…...

甘肃麻花:酥脆香甜的陇原美味
在甘肃的美食画卷中,甘肃麻花以其独特的魅力占据着重要的一席之地。甘肃食家巷麻花,那金黄酥脆的外形,宛如一件件精美的艺术品。每一根麻花的纹理都清晰可见,缠绕交织,散发着诱人的光泽。 制作甘肃麻花是一门传统的手艺…...

C语言刷题小记2
前言 本篇博客还是为大家分享一些C语言的OJ题目,如果你感兴趣,希望大佬一键三连。多多支持。下面进入正文部分。 题目1竞选社长 分析:本题要求我们输入一串字符,并且统计个数的多少,那么我们可以通过getchar函数来获…...

如何快速掌握硬件性能优化:面向暗影精灵的完整教程
如何快速掌握硬件性能优化:面向暗影精灵的完整教程 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 你是否曾经在玩游戏时突然遭遇卡顿…...

FcμR识别IgM复杂机制的揭示:解锁人体免疫早期应答之谜
一、引言免疫系统是机体抵御病原体入侵、维持内环境稳定的关键防线。在免疫应答过程中,不同类型的免疫球蛋白发挥着独特的作用。其中,IgM作为人体五类免疫球蛋白之一,在免疫应答早期起着至关重要的作用。而Fc受体作为免疫系统中的重要组成部分…...

AI辅助编程工具Cursor在经济学研究中的应用与实战指南
1. 从零开始:为什么经济学家需要AI辅助编程工具 如果你是一名经济学研究者、研究生或者研究助理,我猜你肯定经历过这样的场景:为了清洗一份来自世界银行或国家统计局的复杂面板数据,你对着Stata或者R的代码文档反复调试࿰…...

Windows平台iOS模拟器开发革命:ipasim如何让iOS应用在Windows上“原生“运行
Windows平台iOS模拟器开发革命:ipasim如何让iOS应用在Windows上"原生"运行 【免费下载链接】ipasim iOS emulator for Windows 项目地址: https://gitcode.com/gh_mirrors/ip/ipasim 嘿,开发者朋友们!你是否曾经梦想过在Win…...

如何使用DevPod打造你的终极开源云开发环境:完整指南
如何使用DevPod打造你的终极开源云开发环境:完整指南 【免费下载链接】devpod Codespaces but open-source, client-only and unopinionated: Works with any IDE and lets you use any cloud, kubernetes or just localhost docker. 项目地址: https://gitcode.c…...

基于MCP协议构建技术生态分析工具:架构设计与工程实践
1. 项目概述:一个技术生态分析工具的诞生最近在折腾一个挺有意思的东西,一个叫apifyforge/tech-ecosystem-analysis-mcp的项目。光看这个名字,可能有点唬人,但说白了,它就是一个用来“解剖”技术生态系统的工具。想象一…...
)
若依框架菜单管理实战:手把手教你为列表页添加详情页(Vue+Element UI)
若依框架菜单管理实战:手把手教你为列表页添加详情页(VueElement UI) 在后台管理系统开发中,列表页与详情页的联动是基础但关键的功能需求。许多开发者在使用若依框架的代码生成器快速搭建项目后,常常面临一个典型问题…...

【Google全家桶AI功能2026终极前瞻】:20位谷歌AI Lab核心工程师闭门透露的7大颠覆性升级路径
更多请点击: https://intelliparadigm.com 第一章:Google全家桶AI功能2026升级全景图谱 2026年,Google正式将Gemini 3.5 Ultra深度集成至全系生产力产品中,实现跨端、实时、上下文感知的AI协同。核心升级聚焦于“意图理解前置化”…...

Standard计划突然限速?揭秘MJ v6.1后台配额算法变更,3步绕过队列延迟,今日生效
更多请点击: https://intelliparadigm.com 第一章:Standard计划限速事件的全貌还原 2024年Q2,Standard计划在多个云原生生产环境中突发性触发API速率限制(Rate Limiting),导致下游服务批量超时与重试风暴。…...

VS2019集成libigl实战:从零到一的图形学开发环境搭建
1. 环境准备:从零搭建开发基础 第一次接触libigl和VS2019的组合时,我完全能理解那种手足无措的感觉。记得当时为了赶图形学课程作业,我和室友熬了三个通宵才把环境跑通。现在回头看,其实只要掌握几个关键步骤,整个过程…...