Coco-LIC基于ubuntu的vscode进行断点调试
1、下vscode和插件
参考这个也行
https://zhuanlan.zhihu.com/p/704522656
2、编译debug版本并修改json
要在 Visual Studio Code (VSCode) 中进行断点调试 ROS 任务,你需要进行以下几个步骤:
### 1. 安装所需插件
- **C/C++ 插件**: 提供对 C++ 代码的调试支持。
- **ROS 插件**: 提供对 ROS 工作空间的集成支持(可选,但对 ROS 开发有帮助)。### 2. 配置 CMake 和编译
确保你的 ROS 包和工作空间已经使用 `catkin_make` 或 `catkin build` 编译成功,并且包含了调试信息。在 `CMakeLists.txt` 文件中,确保添加了以下行来启用调试信息:
```cmake
set(CMAKE_BUILD_TYPE Debug)
```然后,重新编译你的工作空间:
```bash
cd ~/catkin_ws
catkin_make
```### 3. 配置调试环境
创建一个 `launch.json` 文件来配置 VSCode 的调试设置:
1. 打开 VSCode,进入你的工作空间目录。
2. 在左侧活动栏中点击调试图标(一个播放按钮和一个错误标记的图标),然后点击“创建一个 `launch.json` 文件”。
3. 选择“C++ (GDB/LLDB)”作为环境。
4. 编辑生成的 `launch.json` 文件,添加适用于 ROS 的配置。下面是一个示例配置:```json
{
"version": "0.2.0",
"configurations": [
{
"name": "ROS Debug",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/devel/lib/your_package/your_node",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "build",
"miDebuggerPath": "/usr/bin/gdb",
"internalConsoleOptions": "openOnSessionStart",
"logging": {
"moduleLoad": true
}
}
]
}
```确保将 `"program"` 字段设置为你的 ROS 节点的实际可执行文件路径(可以在 `devel/lib/your_package/` 目录下找到)。
### 4. 配置任务
创建一个 `tasks.json` 文件来配置构建任务:
1. 在 `.vscode` 目录下创建一个 `tasks.json` 文件(如果尚未存在)。
2. 添加以下内容以构建你的 ROS 包:```json
{
"version": "2.0.0",
"tasks": [
{
"label": "build",
"type": "shell",
"command": "catkin_make",
"args": [
"--this"
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": ["$gcc"],
"detail": "Generated task by VSCode."
}
]
}
```### 5. 设置断点
在 VSCode 的编辑器中打开你的源代码文件,点击行号左侧的空白区域来设置断点。
### 6. 启动调试
1. 确保 ROS 节点没有运行。
2. 在 VSCode 中,点击左侧的调试图标,然后选择刚才创建的 `ROS Debug` 配置。
3. 点击绿色的播放按钮开始调试。调试器将启动你的节点,并在设置的断点处暂停。### 7. 运行 ROS Launch
如果你需要通过 `roslaunch` 启动整个 ROS 系统并调试其中的节点,可以在 VSCode 外部先启动 `roslaunch`,然后使用 VSCode 调试单个节点。
### 小提示
- 确保 GDB 和其他调试工具已正确安装,并在系统路径中。
- 如果调试过程中出现问题,可以查看 VSCode 的调试控制台和终端输出,获取更多的调试信息。通过这些步骤,你应该能够在 VSCode 中进行 ROS 任务的断点调试。如果遇到具体问题,可以进一步调整配置或提供更多细节以获得帮助。
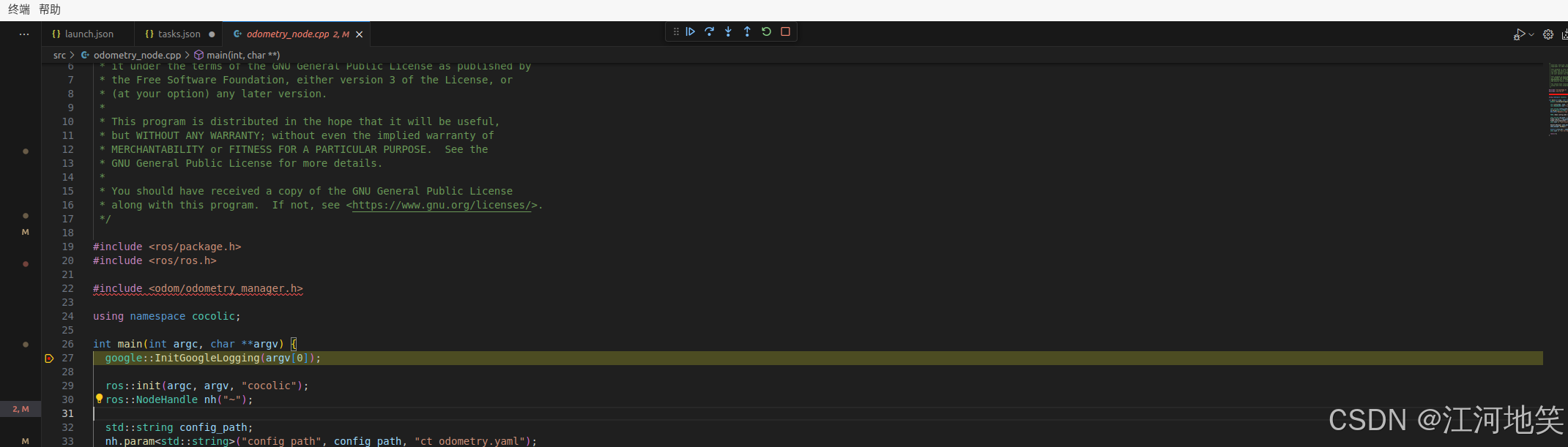
比如这是我的launch.json
{"version": "0.2.0","configurations": [{"name": "ROS Debug","type": "cppdbg","request": "launch","program": "/home/kj/catkin_ws/devel/lib/cocolic/odometry_node","args": [],"stopAtEntry": false,"cwd": "${workspaceFolder}","environment": [],"externalConsole": false,"MIMode": "gdb","setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}],"preLaunchTask": "build","miDebuggerPath": "/usr/bin/gdb","internalConsoleOptions": "openOnSessionStart","logging": {"moduleLoad": true}}]
}这是我的tasks.json{"version": "2.0.0","tasks": [{"label": "build","type": "shell","command": "catkin_make","args": ["--directory","/home/kj/catkin_ws","-DCMAKE_BUILD_TYPE=RelWithDebInfo"],"problemMatcher": ["$catkin-gcc"],"group": {"kind": "build","isDefault": true},"detail": "Build ROS workspace using catkin_make"}]
}
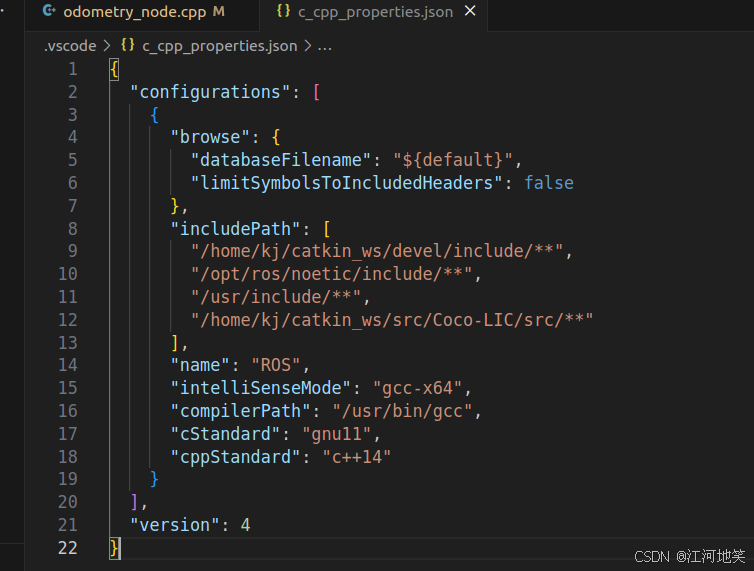
3、调试遇见include找不到的问题
[{ "resource": "/home/kj/catkin_ws/src/Coco-LIC/src/odometry_node.cpp", "owner": "C/C++: IntelliSense", "code": "1696", "severity": 8, "message": "无法打开 源 文件 \"odom/odometry_manager.h\"", "source": "C/C++", "startLineNumber": 22, "startColumn": 1, "endLineNumber": 22, "endColumn": 35 }]
解决方案是,增加一条IncludePath
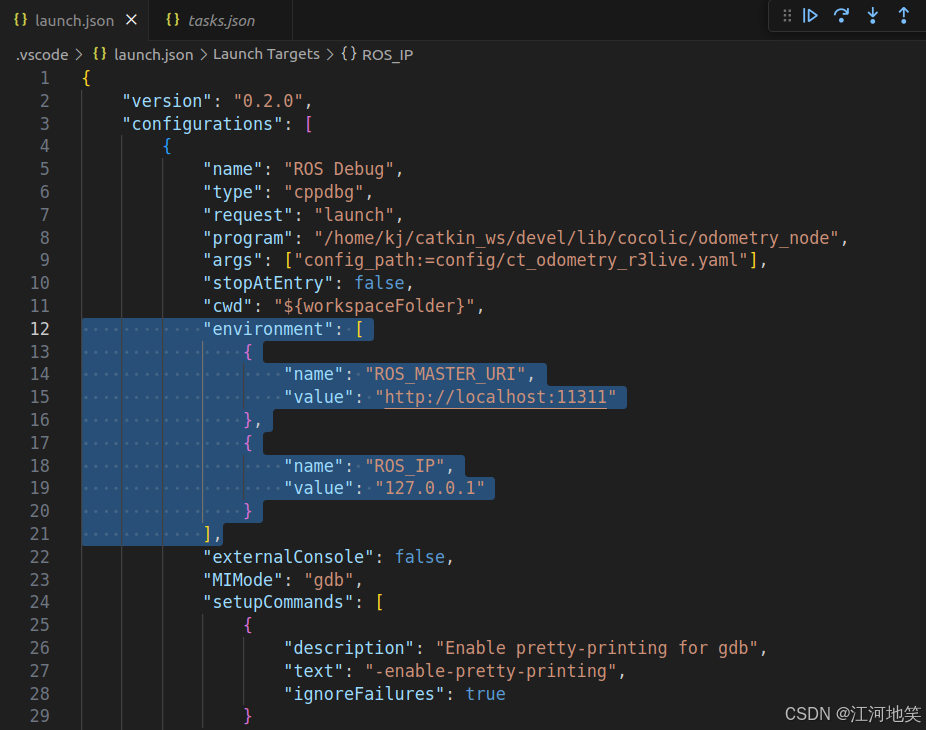
4、[ERROR] [1722929440.191555478]: [registerPublisher] Failed to contact master at [localhost:11311]. Retrying... 断点调试遇到这种问题
错误通常是因为 ROS master 没有运行或是环境变量
ROS_MASTER_URI没有正确设置。在终端中你通常会手动运行roscore来启动 ROS master,但在调试时可能没有这样做。比如控制台的命令是:roslaunch cocolic odometry.launch config_path:=config/ct_odometry_r3live.yaml
解决方案:
第一:在非vscode中的控制台下输入(起到一个类似监视的作用)
roscore
第二:确保正确设置 ROS_MASTER_URI 和 ROS_IP: 确保在调试环境中设置了正确的环境变量。可以在 launch.json 中设置环境变量。
然后就可以进行断点调试了
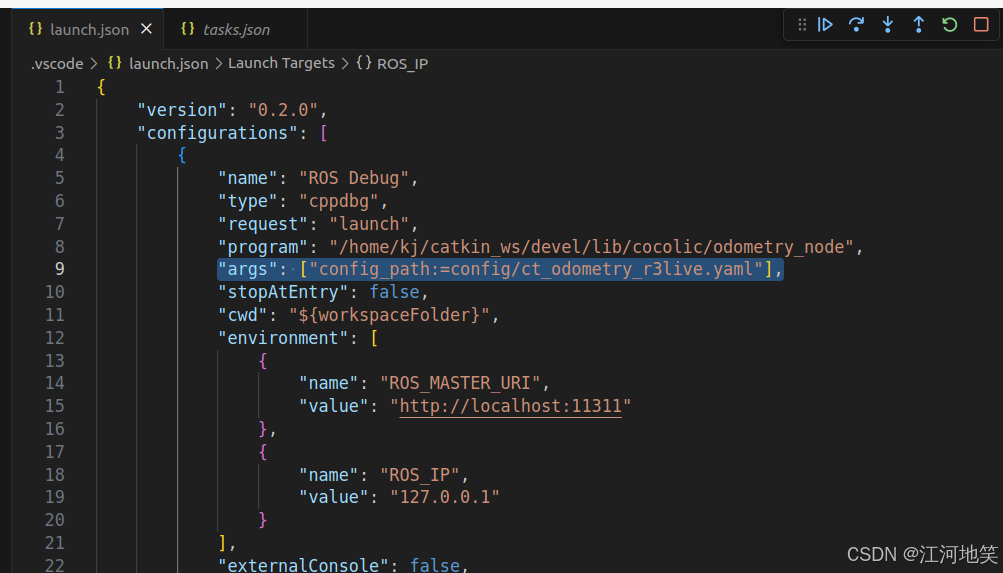
5、断点调试中,发现需要输入参数
原始命令行:roslaunch cocolic odometry.launch config_path:=config/ct_odometry_r3live.yaml
需要在aunch.json中增加args的信息
相关文章:
Coco-LIC基于ubuntu的vscode进行断点调试
1、下vscode和插件 参考这个也行 https://zhuanlan.zhihu.com/p/704522656 2、编译debug版本并修改json 要在 Visual Studio Code (VSCode) 中进行断点调试 ROS 任务,你需要进行以下几个步骤: ### 1. 安装所需插件 - **C/C 插件**: 提供对 C 代码的调试…...

【Web】从TFCCTF-FUNNY浅析PHPCGI命令行注入漏洞利用
目录 背景 CVE-2012-1823 发散利用 法一:读文件 法二:数据外带 背景 CVE-2012-1823 PHP-CGI远程代码执行漏洞(CVE-2012-1823)分析 | 离别歌 省流: 命令行参数不光可以通过#!/usr/local/bin/php-cgi -d include…...

对比一下在 OpenCV 和 AE 中如何实现常用效果 [精]
确实,Adobe After Effects (AE) 也是一个功能强大的工具,特别擅长处理图像和视频的视觉效果和动画。很多在 OpenCV 中实现的图像处理和增强效果,AE 也可以轻松完成,甚至以更加直观的方式实现。下面对比一下在 OpenCV 和 AE 中如何…...

docker安装及使用
一、docker优点及作用 优点: 基础镜像MB级别创建简单隔离性强启动速度秒级移植与分享放便 作用:资源隔离 cpu、memory资源隔离与限制访问设备隔离与限制网络隔离与限制用户、用户组隔离限制 二、docker安装 2.1.配置yum源 yum install -y yum-uti…...
)
HTML前端面试基础(一)
HTML面试题可以涵盖多个方面,包括HTML基础、HTML5新特性、标签语义化、元素分类、属性理解等。以下是一些常见的HTML面试题及其简要答案: 1. HTML基础 问题: 请解释一下HTML文档的基本结构。 答案: HTML文档的基本结构包括<…...

[Git][多人协作][下]详细讲解
目录 1.不同分支下多人协作2.远程分⽀删除后,本地git branch -a依然能看到 1.不同分支下多人协作 ⼀般情况下,如果有多需求需要多⼈同时进⾏开发,是不会在⼀个分⽀上进⾏多⼈开发,⽽是⼀个需求或⼀个功能点就要创建⼀个feature分…...

MySQL笔记(七):索引
一、索引优化速度 创建对应字段的索引,只对该列有效,只能提高该列的查询速度 创建索引后,查询速度变快,但是表占用空间变大 create index 索引名 on 表名(需要创建索引的列)二、索引的原理 普通索引允许该字段重复 全文索引&#…...

JS 原型和原型链
构造函数 封装是面向对象思想中比较重要的一部分,js 面向对象可以通过构造函数实现的封装。 同样的将变量和函数组合到了一起并能通过 this 实现数据的共享,所不同的是 JS 借助构造函数创建出来的实例对象之间是彼此不影响的 存在浪费内存的问题&#…...

【无标题】图像增强技术:直方图均衡化、拉普拉斯算子、对数变换与伽马变换
图像增强技术:直方图均衡化、拉普拉斯算子、对数变换与伽马变换 在图像处理领域,图像增强是一种关键技术,用于提升图像的视觉效果和质量。本文将介绍四种常用的图像增强方法:直方图均衡化、拉普拉斯算子、对数变换和伽马变换。我…...

自动化专业英语
前言 电子信息、电气工程、自动化专业英语词汇汇总,不定期更新 常用 Asynchronous:异步synchronous:同步notification:通知blade:平面shaft:轴magnetic:磁场的bearing:轴承valve&…...

如何使用 Python 进行数据可视化,比如绘制折线图?
要使用Python进行数据可视化,可以使用matplotlib库来绘制折线图。以下是一个简单的示例代码: 首先,确保已安装matplotlib库。可以使用以下命令安装: pip install matplotlib在Python脚本中导入matplotlib库: import…...

PostgreSQL数据库的事务ID和事务机制
PostgreSQL后续简称PG。PG只读事务不会分配事务ID。为了在共享锁等情况下对事务进行标识,需要一种非持久化的事务ID,即虚拟事务ID,vxid。虚拟事务ID不需要把事务ID持久化到磁盘。因为事务ID是很宝贵的资源,简单的select语句不会申…...

LeetCode 热题 HOT 100 (020/100)【宇宙最简单版】[创作中]
【链表】No. 0142 环形链表 II【中等】👉力扣对应题目指路 希望对你有帮助呀!!💜💜 如有更好理解的思路,欢迎大家留言补充 ~ 一起加油叭 💦 欢迎关注、订阅专栏 【力扣详解】谢谢你的支持&#…...

XML动态sql查询当前时间之前的信息报错
如图,sql语句在数据库里可以正常运行但是再XML文件不可以正常运行,报错。 原因:在XML中小于号"<"是会被默认认定成文一个标签的开始,所以用小于号就会报错。 解决办法: 1.把表达式反过来改成大于号 2…...

EMQX服务器安装MQTT测试
cd /usr/local/develop wget https://www.emqx.com/en/downloads/broker/5.7.1/emqx-5.7.1-el7-amd64.tar.gz mkdir -p emqx && tar -zxvf emqx-5.7.1-el7-amd64.tar.gz -C emqx ./emqx/bin/emqx start 重启 ./emqx/bin/emqx restart http://10.8.0.1:18083/ 账号ad…...

3. 无重复字符的最长子串(滑动窗口)
目录 :题目: 二:代码: 三:结果: 一:题目: 给定一个字符串 s ,请你找出其中不含有重复字符的 最长 子串 的长度。 二:代码: class Solution { …...

用javaagent和javassist实现Arthas的watch功能
一、被监控的服务 spring-boot-demo 1、 pom.xml <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation&q…...

golang 图片转1bit color bmp图片
问题背景 一些打印机需要的都是1bit color bmp图片,但是golang中没有直接的办法,官方image库最低bpp为8,打印机无法使用。 在github上找到了很多资源,都没有直接能转的,突然看到一个老外,可以支持plattered图片转位1bit color bmp图片,然后自己先把图片转位plattered黑…...

Leetcode75-5 反转字符串的元音字母
本质上来说就是反转字符串 一部分需要反转 一部分不动 思路: 1.用String字符串倒序拼接 就是过滤掉不是元音字符 然后把所有的字符(非元音的直接复制过来 元音字母直接从反转的字符串里边复制即可) 2.看了题解发现自己写的啰嗦了 就是一个双指针问题用…...

static关键字在Java中的作用与用法
static关键字在Java中的作用与用法 大家好,我是微赚淘客系统3.0的小编,是个冬天不穿秋裤,天冷也要风度的程序猿! 在Java中,static关键字是一个非常重要的概念,用于定义静态成员、方法和内部类。它的使用可…...

拒绝“无效代码式”护肤:基于皮肤生理学的 2026 正确护肤顺序指南
拒绝“无效代码式”护肤:基于皮肤生理学的 2026 正确护肤顺序指南 作者:预颜美历 关键词:皮肤屏障、渗透路径、早C晚A、精准护肤、算法优化 0x00 前言:你的护肤逻辑是否存在“逻辑漏洞”? 在开发中,Bug 往往…...

2026.04.07随记
1、PyTorch1、dir(模块):查看任意模块的方法2、X.sum(0, keepdimTrue):keepdimTrue保留维度X torch.tensor([[1.0, 2.0, 3.0], [4.0, 5.0, 6.0]]) # (2,3) X.sum(0, keepdimTrue), X.sum(1, keepdimTrue)…...

vLLM-v0.17.1部署案例:跨境电商多语言商品描述生成系统落地
vLLM-v0.17.1部署案例:跨境电商多语言商品描述生成系统落地 1. 项目背景与需求分析 跨境电商平台面临着一个共同挑战:如何高效生成多语言商品描述。传统人工撰写方式存在以下痛点: 语言障碍:需要雇佣多语种文案人员成本高昂&am…...

1、DDPG复现demo
1. DDPG 算法学习心得:从原理理解到实战感悟 近期在学习强化学习算法,从基础的 DQN 逐步深入到连续控制领域,DDPG 给了我非常深刻的启发。作为一种经典的深度确定性策略梯度算法,它解决了传统 DQN 无法处理连续动作空间的问题&am…...

SDMatte多GPU并行推理配置:提升企业级批量处理吞吐量
SDMatte多GPU并行推理配置:提升企业级批量处理吞吐量 1. 为什么需要多GPU并行推理 当企业需要处理大批量图片时,单张GPU往往难以满足需求。想象一下,你有一家电商公司,每天需要处理上万张商品图片的背景替换。如果只用一张GPU&a…...

如何快速掌握VDA5050协议:AGV通信标准完整指南与实战应用
如何快速掌握VDA5050协议:AGV通信标准完整指南与实战应用 【免费下载链接】VDA5050 Official Specification document for the VDA 5050 项目地址: https://gitcode.com/gh_mirrors/vd/VDA5050 在智能制造和自动化物流领域,不同品牌AGV设备之间的…...

NL2SQL的十字路口:大模型与传统方法,谁是复杂场景的最终答案?
1. 当自然语言遇上SQL:NL2SQL技术的前世今生 第一次听说"用大白话就能查数据库"这个概念时,我正被一堆复杂的SQL查询折磨得焦头烂额。那是2016年,我负责的电商后台系统需要频繁从几十张表中提取数据,每次写嵌套查询都要…...

BUUCTF-BUU BURP COURSE
打开页面后提示我们只能本地访问(127.0.0.1)构造伪造ip头发现x-real-ip可行需要登录但账号密码已经给了在源代码中找到密码构造POST请求体usernameadmin&passwordwwoj2wio2jw93ey43eiuwdjnewkndjlwe成功登录找到flag...

跨平台BongoCat桌面宠物开发实战:从零构建互动猫咪应用
跨平台BongoCat桌面宠物开发实战:从零构建互动猫咪应用 【免费下载链接】BongoCat 🐱 跨平台互动桌宠 BongoCat,为桌面增添乐趣! 项目地址: https://gitcode.com/gh_mirrors/bong/BongoCat BongoCat是一款基于Tauri框架的跨…...

拒绝当“移动台式机”!从华硕天选6到联想拯救者,这五款游戏本让你在图书馆也能畅玩3A
一、目的为学生党和需要移动办公的玩家推荐五款在高性能与长续航之间取得良好平衡的高性价比游戏本,帮助用户摆脱对电源插座的依赖,在教室、图书馆或差旅途中也能从容使用。二、推荐机型详细对比型号核心配置存储与屏幕主要优势与特点参考价格华硕天选6 …...