【自动驾驶】ROS中自定义格式的服务通信,含命令行动态传参(c++)
目录
- 通信流程
- 创建服务器端及客户端
- 新建服务通讯文件
- 修改service的xml及cmakelist
- CMakeLists.txt编辑 msg 相关配置
- 编译消息相关头文件
- 在cmakelist中包含头文件的路径
- 在service包下编写service.cpp
- 在client包下编写client.cpp
- 测试运行
- 查询服务的相关指令
- 列出目前的所有服务:
- 查询参数:
- 显示某包下的服务
- 显示服务消息的具体信息
服务通信是基于请求产生的通信。
通信流程
0.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
3.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
4.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
注意:
1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个。
创建服务器端及客户端
cd 到ws/src目录下:
catkin_create_pkg service std_msgs rospy roscpp
catkin_create_pkg client std_msgs rospy roscpp
新建服务通讯文件
在服务端的src目录下,新建srv文件夹,并在内新建mymessage.srv
# 客户端请求时发送的两个数字
string a
string b
#客户端发送与服务端响应,中间使用---进行隔开,这里是简单把两个string拼接在一起
---
# 服务器响应发送的数据
string ab
修改service的xml及cmakelist
package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend>
CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
需要加入 message_generation,必须有 std_msgs
#配置 srv 源文件
add_service_files(FILESAddInts.srv
)
生成消息时依赖于 std_msgs
generate_messages(DEPENDENCIESstd_msgs
)#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listenerCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
编译消息相关头文件
退回到ws目录,使用catkin_make --pkg service
编译出相关的三个头文件

在cmakelist中包含头文件的路径
新生成的.h文件位于devel/include文件夹下,在请求及响应方的cmakelist中添加:
include_directories(
# include${catkin_INCLUDE_DIRS}"/root/work/ws/devel/include/"
)
在service包下编写service.cpp
服务端的功能主要是将收到的两个string连接起来。
#include "ros/ros.h"
#include "service/mymessage.h"
#include <string>
// bool 返回值由于标志是否处理成功
bool doReq(service::mymessage::Request& req,service::mymessage::Response& resp){std::stringstream ss;ss<<std::string(req.a)<<std::string(req.b);ROS_INFO("拼好的字符串:%s",ss.str().c_str());resp.ab = ss.str();return true;
}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// 2.初始化 ROS 节点ros::init(argc,argv,"testServer");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建服务以及注册回调函数ros::ServiceServer server = nh.advertiseService("mymessage",doReq);ROS_INFO("服务已经启动....");// 5.回调函数处理请求并产生响应// 6.由于请求有多个,需要调用 ros::spin()ros::spin();return 0;
}
同时在cmakelist中:
add_executable(${PROJECT_NAME}_node src/service.cpp)
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}
)
在service包下新增launch文件
<launch><node name="myservice" pkg="service" type="service_node" output="screen"/>
</launch>
在client包下编写client.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "service/mymessage.h"int main(int argc, char *argv[])
{setlocale(LC_ALL,"");// argv[0]:指向程序名称 ./program 的字符串指针// argv[1]:指向 arg1 的字符串指针// argv[2]:指向 arg2 的字符串指针// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3,//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径)if (argc != 5){ROS_INFO("argc=(%d)",argc);ROS_ERROR("请提交两个字符串");return 1;}// 2.初始化 ROS 节点ros::init(argc,argv,"testClient");// 3.创建 ROS 句柄ros::NodeHandle nh;// 4.创建 客户端 对象ros::ServiceClient client = nh.serviceClient<service::mymessage>("mymessage");//等待服务启动成功//方式1ros::service::waitForService("mymessage");//方式2// client.waitForExistence();// 5.组织请求数据service::mymessage ai;//直接输入命令行的字符串ai.request.a = argv[1];ai.request.b = argv[2];// 6.发送请求,返回 bool 值,标记是否成功bool flag = client.call(ai);// 7.处理响应if (flag){ROS_INFO("请求正常处理,响应结果:%s",ai.response.ab.c_str());}else{ROS_ERROR("请求处理失败....");return 1;}return 0;
}
同时在cmakelist中:
add_executable(${PROJECT_NAME}_node src/client.cpp)
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}
)
在client包下新增launch文件
<launch><arg name="a" default="empty"/><arg name="b" default="empty"/><node name="myclient" pkg="client" type="client_node" args="$(arg a) $(arg b)" output="screen"/>
</launch>测试运行
source /root/work/ws/devel/setup.bash
roslaunch service start.launch
#通过如下命令行的形式传入参数,launch文件中使用$(arg a)引用参数的值
roslaunch client start.launch a:=abcd b:=5678

查询服务的相关指令
列出目前的所有服务:
rosservice list
得到服务列表:
/mymessage
/myservice/get_loggers
/myservice/set_logger_level
/rosout/get_loggers
/rosout/set_logger_level
查询参数:
rosservice args /mymessage
输出:
a b
显示某包下的服务
rossrv package service
得出:
service/mymessage
显示服务消息的具体信息
rossrv show mymessage
得出具体信息
[service/mymessage]:
string a
string b
---
string ab
相关文章:
【自动驾驶】ROS中自定义格式的服务通信,含命令行动态传参(c++)
目录 通信流程创建服务器端及客户端新建服务通讯文件修改service的xml及cmakelistCMakeLists.txt编辑 msg 相关配置编译消息相关头文件在cmakelist中包含头文件的路径在service包下编写service.cpp在client包下编写client.cpp测试运行查询服务的相关指令列出目前的所有服务&…...

优思学院|PDCA和DMAIC之间如何选择?
在现代组织中,提升方法、质量和效率是企业追求卓越、保持竞争力的核心目标。在这条道路上,DMAIC(定义、测量、分析、改进、控制)和PDCA(计划、执行、检查、行动)被广泛应用于持续改进和问题解决。这两者虽然…...

5 款最佳 Micro SD 卡恢复软件,助您恢复文件
您是否对数据恢复存在某些疑问,并想知道如何恢复 Micro SD 卡上的文件?如果是,那么在本文中您将找到答案。网上有许多专门用于从 Micro SD 卡或格式化的 Micro 卡恢复已删除文件而设计的软件。因此,在本文中,我们将向您…...

【使用教程】CiA402中的“原点回归模式”和“轮廓位置模式”搭配使用操作实例
使用“原点回归模式”配合“轮廓位置模式”是步进或伺服电机使用过程中最常用的方法,其对于提高自动化生产线的准确性和效率具有重要意义,本文将对正常使用控制电机中发送的命令及顺序进行简要说明。 说明:“原点回归”以“堵转回原点”的方式…...

服务器网络不通排查方案
服务器网络不通排查方案 最近遇到了服务器上服务已经启动,但是在浏览器上无法访问的问题,记录一下排查流程 文章目录 服务器网络不通排查方案netstart排查网络连接信息netstat 命令netstat -aptn 命令 iptables总结 netstart排查网络连接信息 netstat …...
问题解决历程)
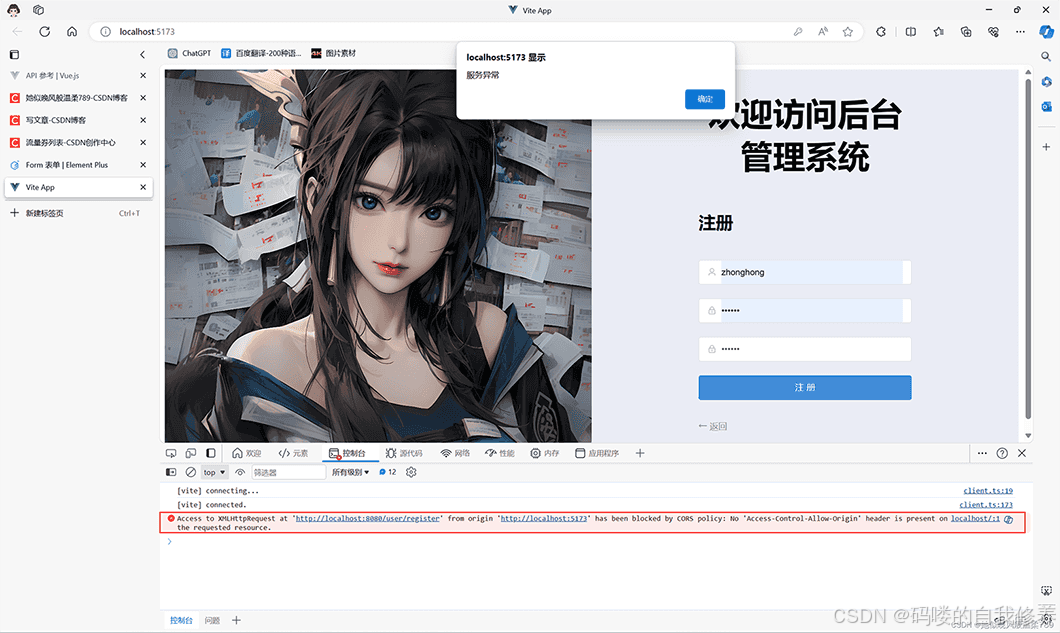
Spring Boot + Vue 跨域配置(CORS)问题解决历程
在使用 Spring Boot 和 Vue 开发前后端分离的项目时,跨域资源共享(CORS)问题是一个常见的挑战。接下来,我将分享我是如何一步步解决这个问题的,包括中间的一些试错过程,希望能够帮助到正在经历类似问题的你…...
Think | 大模型迈向AGI的探索和对齐
注:节选自我于24年初所写的「融合RL与LLM思想探寻世界模型以迈向AGI」散文式风格文章,感兴趣的小伙伴儿可以访问我的主页置顶或专栏收录,并制作了电子书供大家参考,有需要的小伙伴可以关注私信我,因为属于技术散文风格…...
为什么选择在Facebook投放广告?
2024年了你还没对 Facebook 广告产生兴趣?那你可就亏大了! 今天这篇文章,我们会分享它对你扩大业务的好处。要知道,Facebook 广告凭借它庞大的用户群和先进的定位选项,已经是企业主们有效接触目标受众的必备神器。接下…...
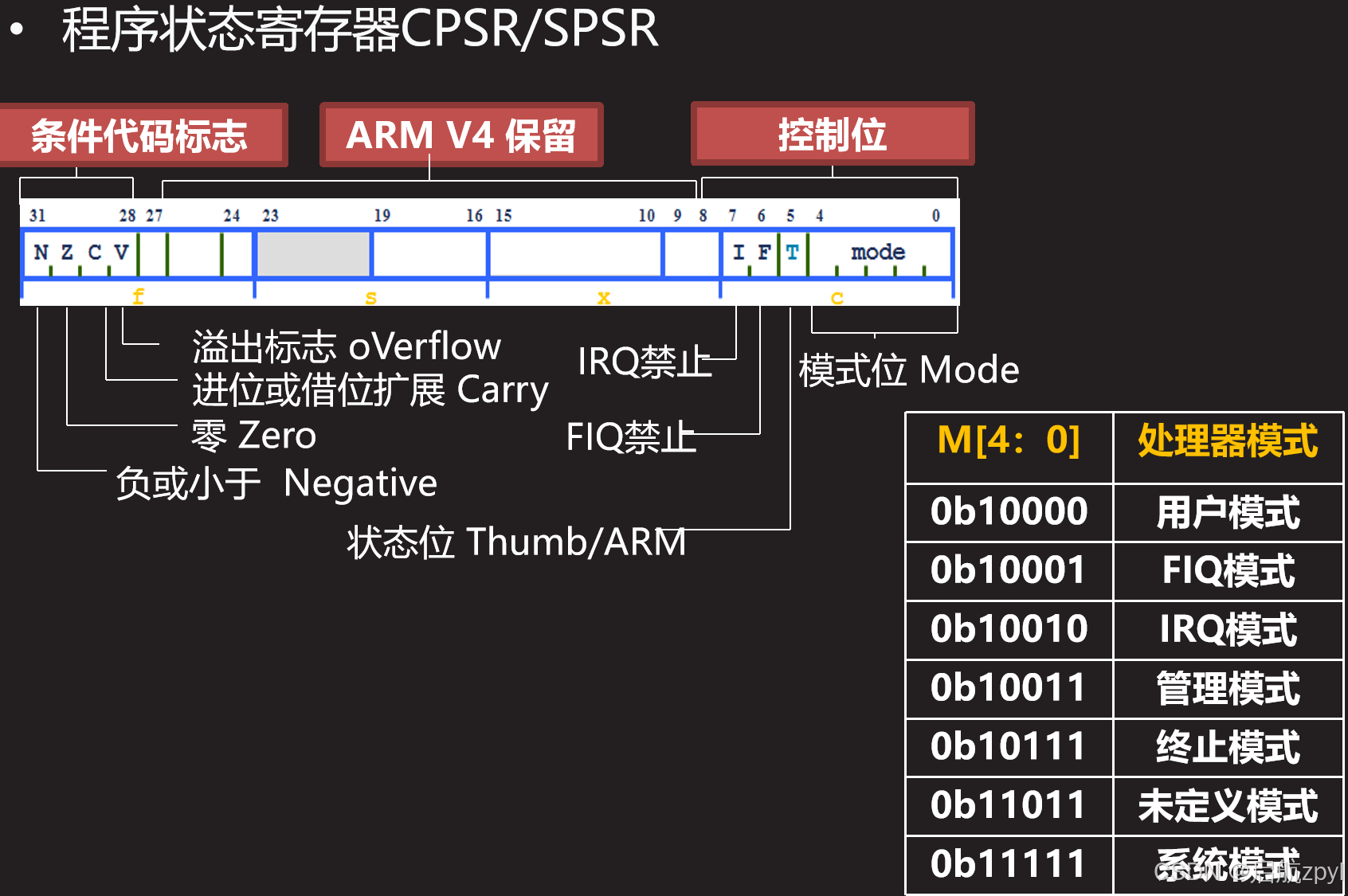
10 ARM 体系
10 ARM 体系 ARM体系1、基本概念1.1 常见的处理器1.2 ARM7三级指令流水线1.3 初识PC寄存器 2、 ARM核的七种工作模式3、ARM核七种异常 ARM体系 1、基本概念 1.1 常见的处理器 PowerPC处理器:飞思卡尔MPC系列 DSP:TI达芬奇系列 FPGA:Xilinx赛灵思的ZYN…...
指令)
ubuntu中设置开机自动运行的(sudo)指令
ubuntu版本:22.04.4 在Ubuntu中设置开机自动运行某一条(需要sudo权限的)指令,我们可以通过编辑系统的启动脚本来实现: 创建一个新的启动脚本:创建一个新的脚本文件,并将其放置在 /etc/init.d/ 目…...

删掉Elasticsearch6.x 的 .security-6索引会怎么样?
背景 玩了下 Elasticsearch 的认证,启动 ES 并添加认证后,看到索引列表额外多了一个 .security-6 。以为是没用的,手欠就给删掉了,然后 Elasticsearch 就访问不了了。 只好再重新部署,再看索引内容,发现这…...
Navicat Premium15 下载与安装(免费版)以及链接SqlServer数据库
转自:https://blog.csdn.net/m0_75188141/article/details/139842565...
Vue3配置vite.config.js代理解决跨域问题
前言: 当浏览器发出一个请求时,只要请求URL的协议、域名、端口三者之间任意一个与当前页面URL不同,就称为跨域。 跨域一般出现在开发阶段,由于线上环境前端代码被打包成了静态资源,因而不会出现跨域问题,这篇文章主要给大家介绍了关于Vue3配置vite.config.js解决跨域问题的相…...

Solidity面试题,由浅入深
Solidity是Ethereum智能合约的主要编程语言,面试题的设计旨在评估候选人对Solidity语言特性的掌握程度,以及他们对区块链和智能合约的理解。下面列出了一些常见的Solidity面试题,涵盖基础知识到高级概念,并简要说明每个问题的答案…...
变量的注意或许需要调试
输入一个自然数N(1<N<9),从小到大输出用1~N组成的所有排列,也就说全排列。例如输入3则输出 123 132 213 231 312 321 输入格式: 输入一个自然数N(1<N<9) 输出格式: N的全排列,每行一…...
C# 增删改查教程 代码超级简单
目录 一.留言 二 .帮助类 三 .增删改查代码展示 一.留言 大家好,前几篇文章我们更新了 C# 三层架构的相关代码,主要写了登录,以及增删改查的相关代码,用的三层架构的框架,那么本篇文章一次性更新C#的增删改查相关代…...

OceanBase V4.2特性解析:OB Oracle模式下的 SDO_GEOMETRY 空间数据类型
1. 背景 1.1. SDO_GEOMETRY的应用场景及能力 在数字化城市、物联网和新能源汽车等领域蓬勃发展的背景下,空间数据类型的存储和分析需求日益增长;对于涉及位置信息服务和地理位置信息应用而言,数据库中具备对sdo_geometry数据类型的支持无疑…...

简介面向对象的封装、继承、多态和抽象
面向对象(Object-Oriented)的特点通常归纳为四个核心概念:封装、继承、多态和抽象。 1. 封装(Encapsulation) 定义: 封装是将对象的属性(数据)和方法(操作)打包在一起&…...

OpenCV + CUDA + cuDNN模块编译
简介 在追求高端性能与资源优化并重的应用场景中,如边缘计算设备或资源受限的开发板上运行YOLO等复杂深度学习模型,采用C结合OpenCV与GPU加速技术相较于传统的Python环境展现出显著优势。这种策略不仅极大地提升了执行效率,还显著降低了运行时…...

Redis 缓存预热、雪崩、穿透、击穿
缓存预热 缓存预热是什么 缓存预热就是系统上线后,提前将相关的缓存数据直接加载到缓存系统。避免在用户请求的时候,先查询数据库,然后再将数据缓存的问题!用户直接查询事先被预热的缓存数据!解决方案 使用 PostConstr…...

OpenClaw+Qwen2.5-VL-7B:个人社交媒体自动化图文创作
OpenClawQwen2.5-VL-7B:个人社交媒体自动化图文创作 1. 为什么选择OpenClaw做社交媒体自动化 去年我开始运营一个科技类自媒体账号,最初每天花3小时手动找素材、写文案、配图。直到发现OpenClaw这个开源框架,我的工作流彻底改变了——现在9…...

COMSOL混凝土碳化模型
COMSOL 混凝土碳化模型混凝土表面那层白霜般的碳化层,总让我想起实验室里放了三个月的苏打饼干。这层碳酸钙的生成过程,在COMSOL里建模就像在模拟一场微观世界的化学舞会——二氧化碳分子突破混凝土保护层,与氢氧化钙在孔隙溶液里跳起离子交换…...

《SpringBoot》史上最全SpringBoot相关注解介绍
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

Python入门:轻松掌握输入输出与数据类型,2025年ASOC SCI2区TOP,基于动态模糊系统的改进灰狼算法FGWO,深度解析+性能实测。
Python 入门:输入输出与数据类型详解 输入与输出基础 Python 的输入输出是程序与用户交互的基础。input() 函数用于接收用户输入,默认返回字符串类型。例如: user_input input("请输入内容:") print("你输入的内容…...

ADC过采样技术提升嵌入式系统测量精度
1. ADC过采样技术概述在嵌入式系统开发中,ADC(模数转换器)的性能往往直接决定了整个系统的测量精度。标准的10位ADC在很多场合已经足够使用,但当我们需要更高精度的测量时,过采样技术就成为了一个经济有效的解决方案。…...

3D 效果与深度:现代 UI 设计的立体革命
3D 效果与深度:现代 UI 设计的立体革命探索如何在 2024 年通过 CSS 和 Flutter 实现令人惊叹的 3D UI 效果,为用户界面增添深度和层次感。一、3D 设计的崛起 在当今的数字设计领域,平面化设计已经不再是唯一的选择。随着硬件性能的提升和浏览…...

SQLite NULL 值
SQLite NULL 值 SQLite 是一种轻量级的数据库管理系统,广泛用于嵌入式系统和移动应用中。在 SQLite 中,NULL 值是一个非常重要的概念,它表示未知、缺失或不确定的数据。本文将详细介绍 SQLite 中的 NULL 值,包括其定义、处理方法以及优化技巧。 什么是 NULL 值 在 SQLit…...
)
Redis 实战篇1.4 (Redis优化秒杀)
Redis优化秒杀原流程思路Redis优化秒杀在Redis中库存用String数据类型存储,为了确保一人一单,则订单id存储用Set数据类型保证数据的唯一性lua脚本保证原子性异步秒杀方案案例:需求创建订单(还没完成明天继续)// 解锁的…...
✅)
计算机毕业设计:Python汽车销量大数据预测平台 Flask框架 可视化 机器学习 AI 大模型 大数据(建议收藏)✅
博主介绍:✌全网粉丝50W,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战8年之久,选择我们就是选择放心、选择安心毕业✌ > 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与…...

企业AI应用开发:从零构建企业级AI智能体的全流程指南
一文讲透智能体开发的核心要素,让AI真正融入业务系统随着大模型技术的成熟,AI智能体正从概念走向企业核心业务。对于信息中心和软件开发团队而言,如何低成本、高效率地将AI能力嵌入业务流程,已成为技术选型的核心考量。本文将系统…...